The Effect of a Flow Field on Chemical Detection Performance of Quadrotor Drone


Abstract
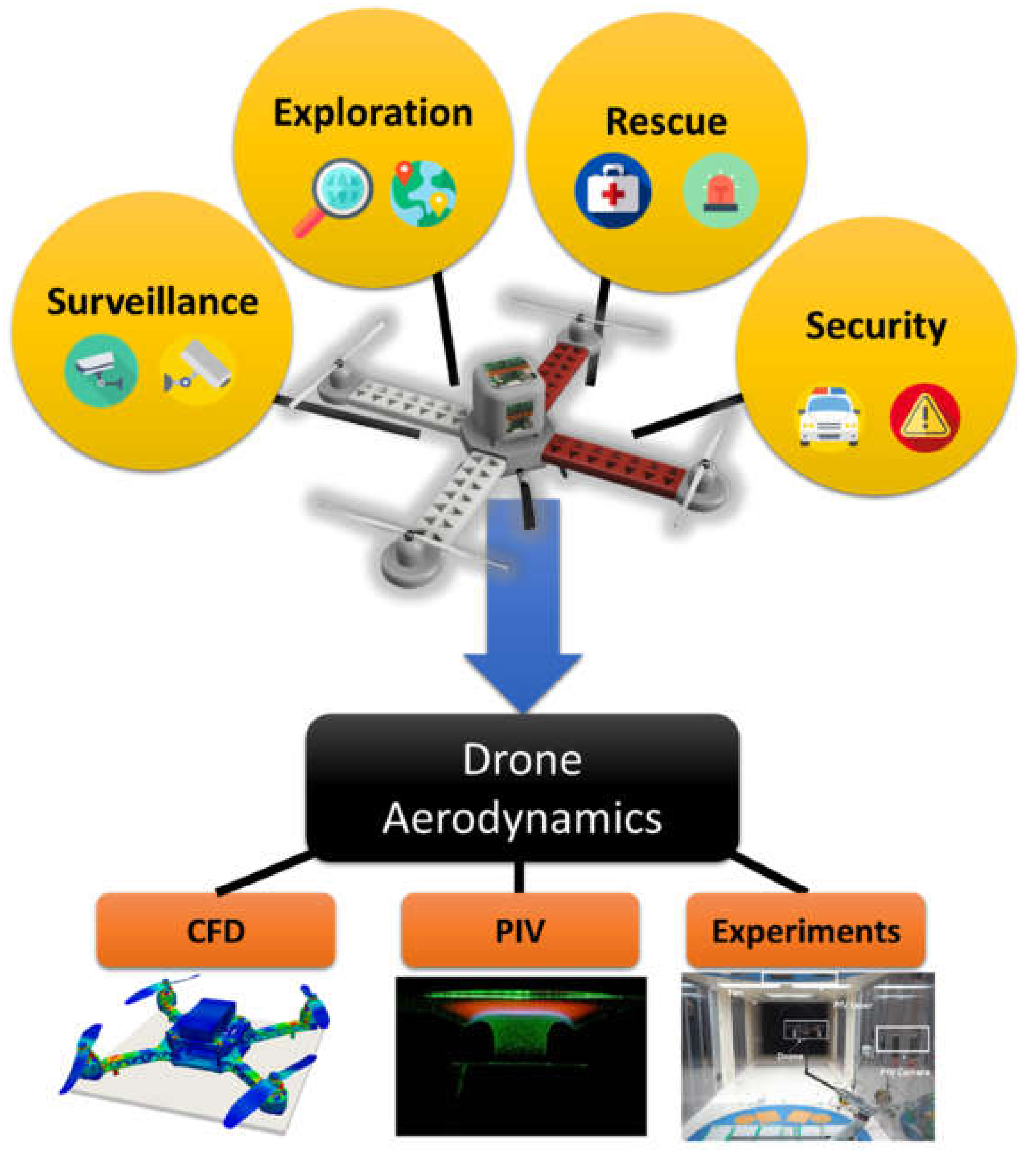
:1. Introduction
2. Materials and Methods
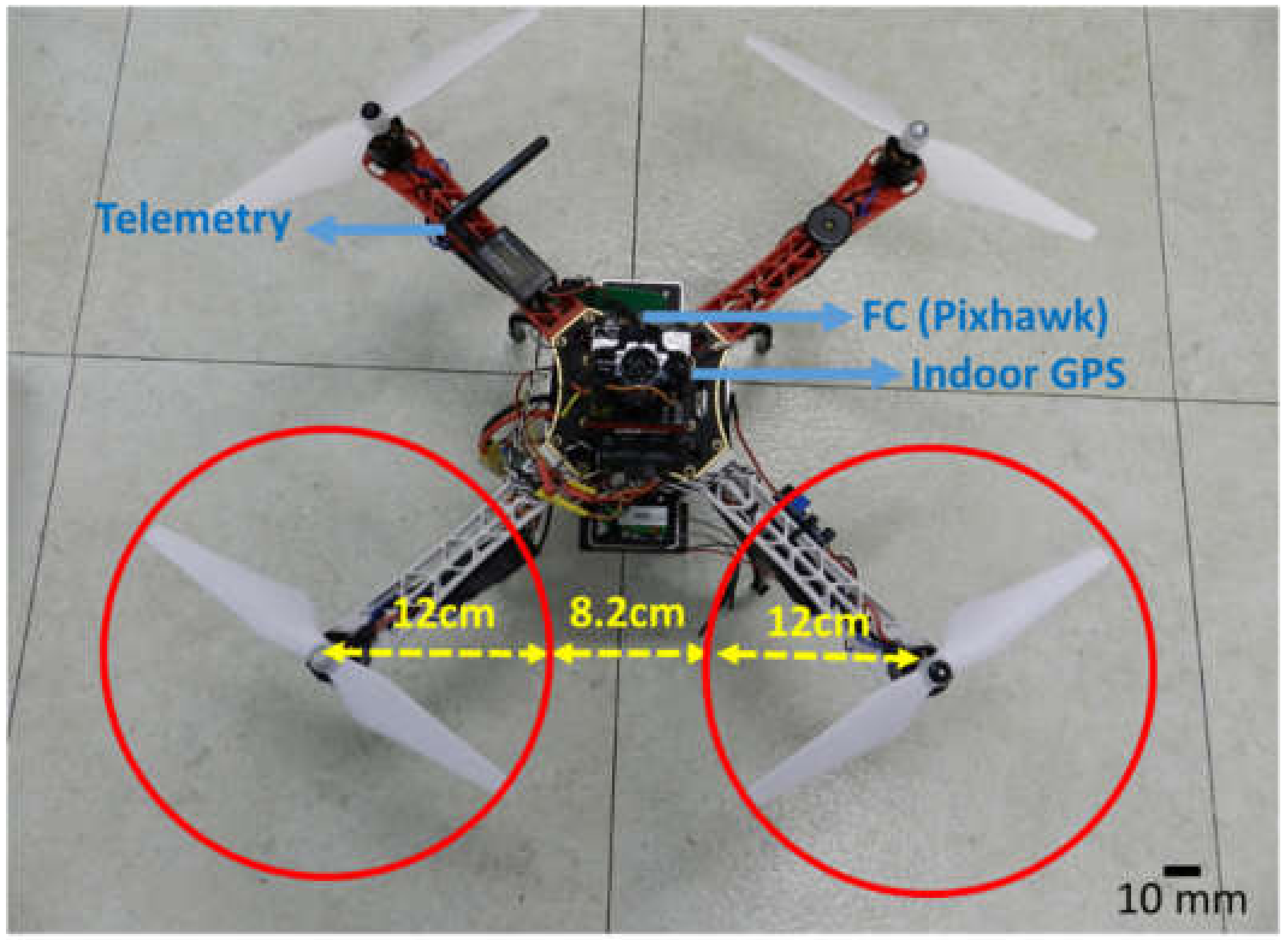
2.1. Drone Platform
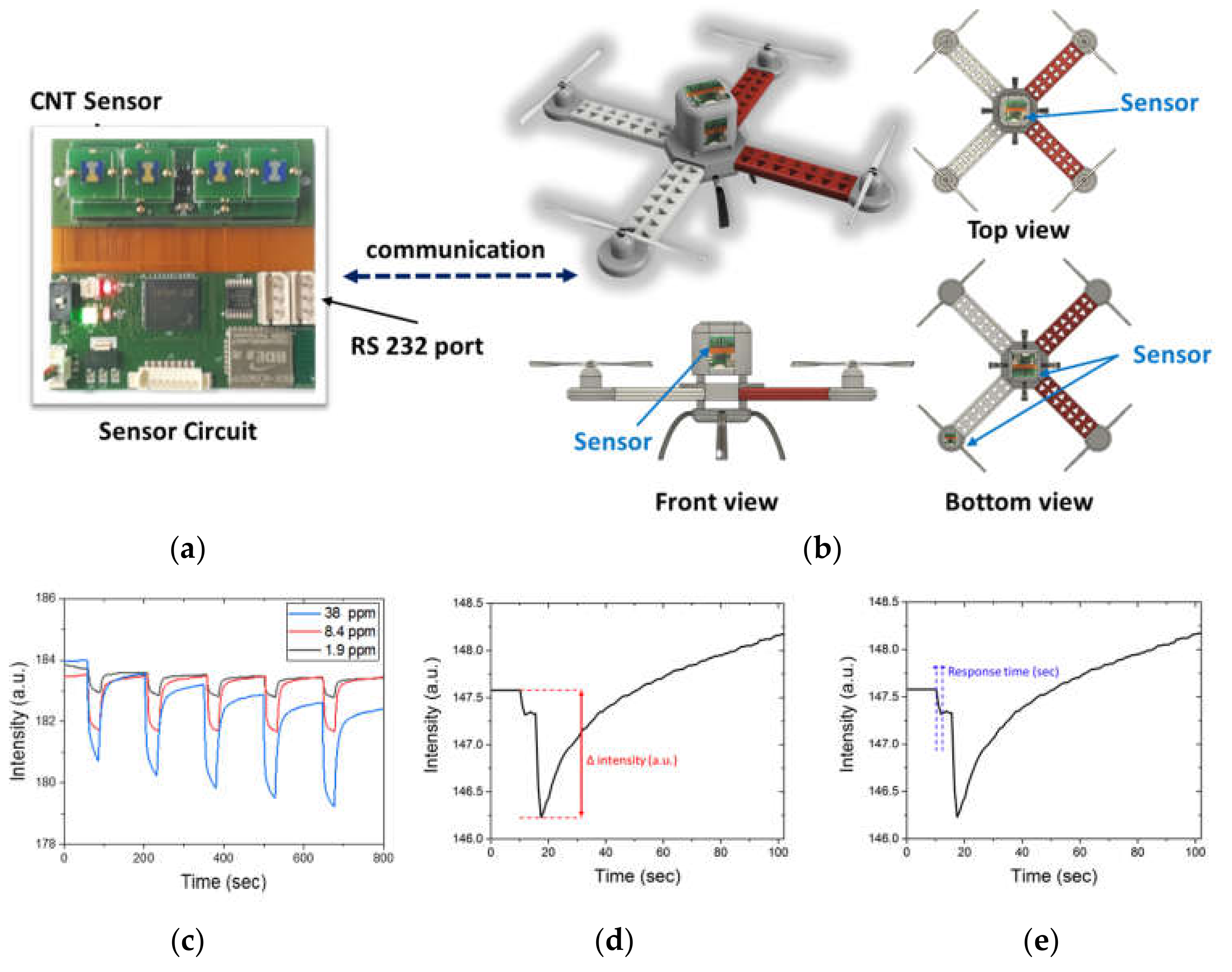
2.2. CNT Sensor
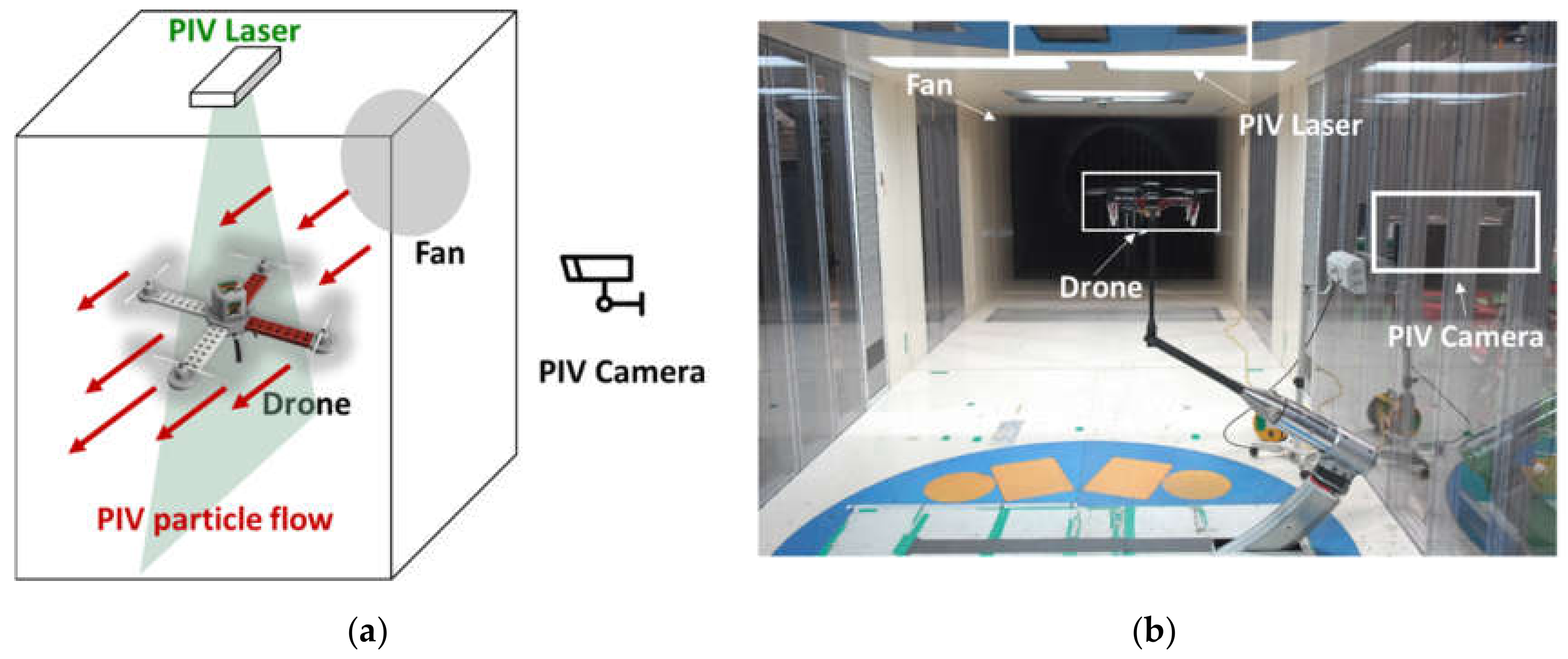
2.3. Air Flow Visualization by PIV
3. Results
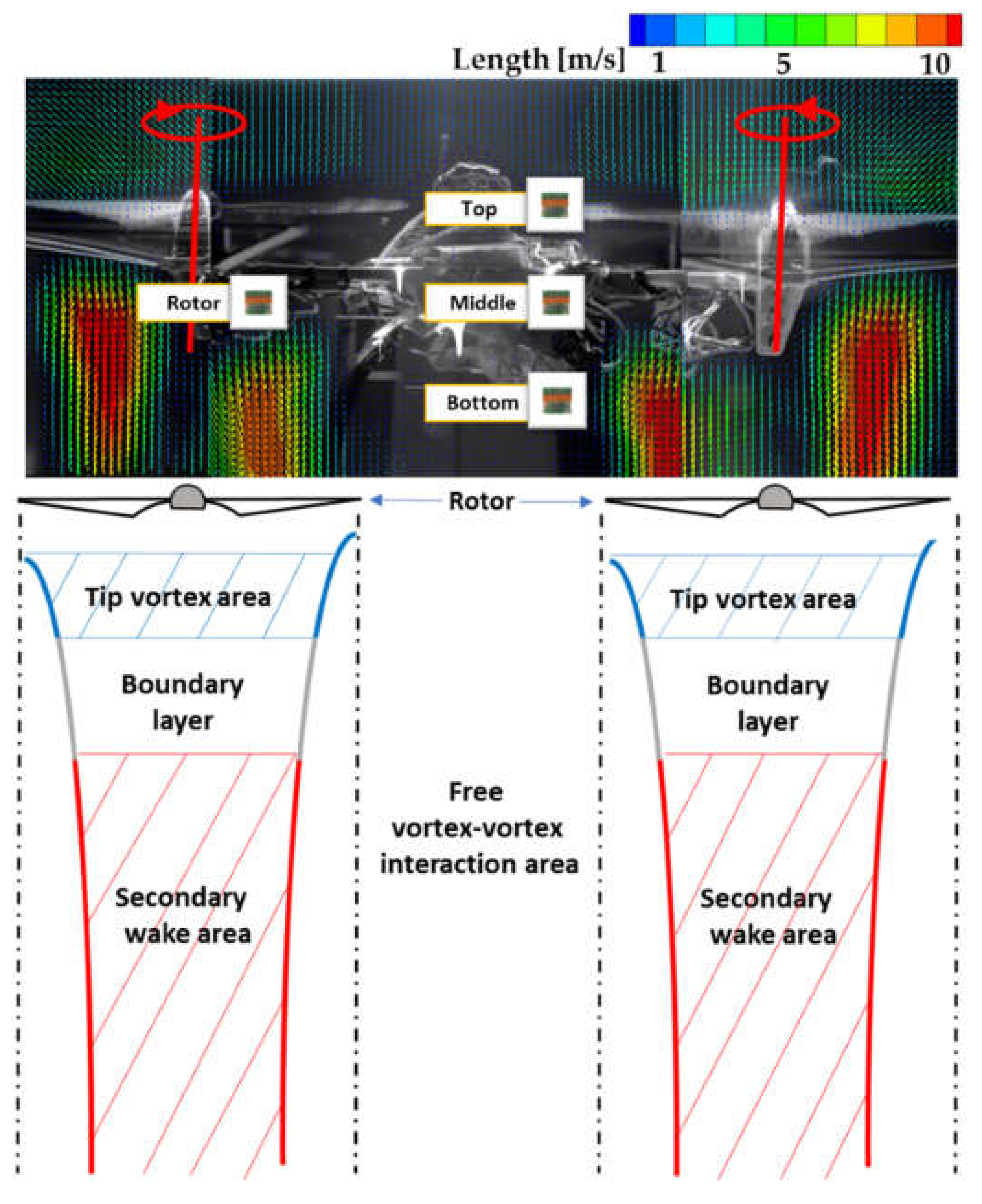
3.1. Aerodynamic Fields around the Drone
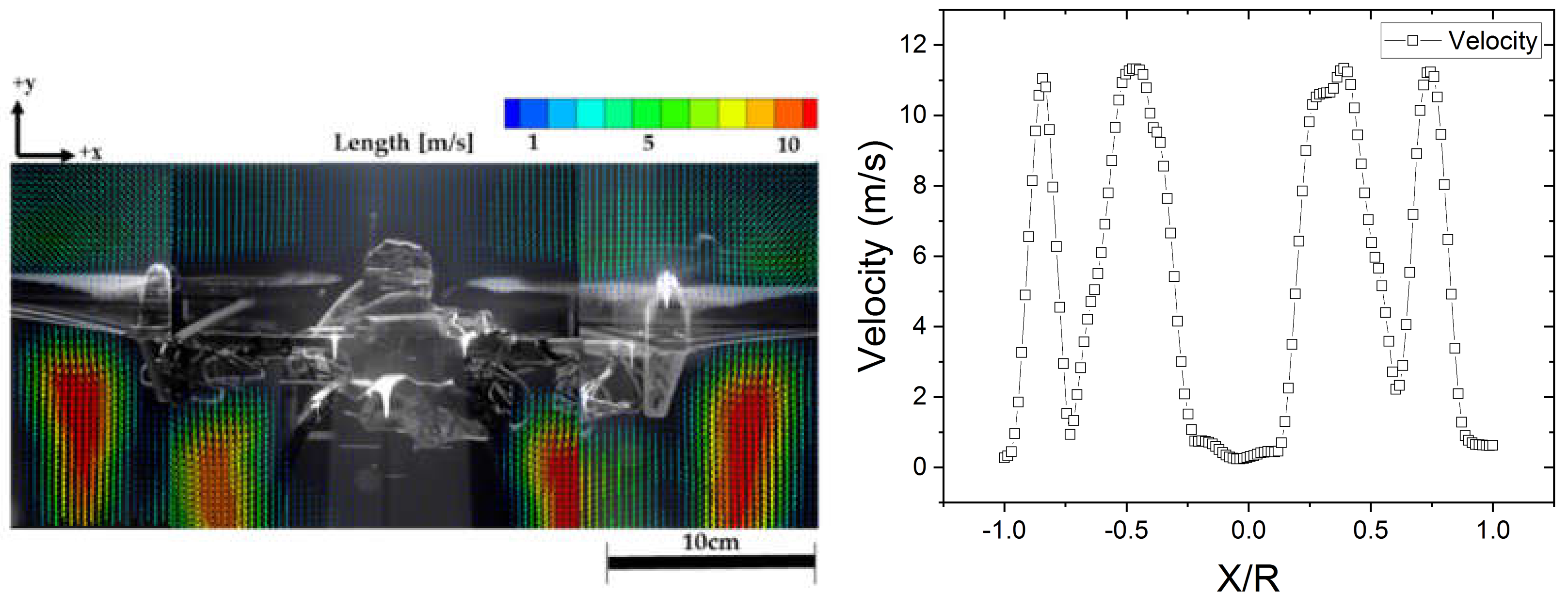
3.1.1. Velocity Field around the Drone
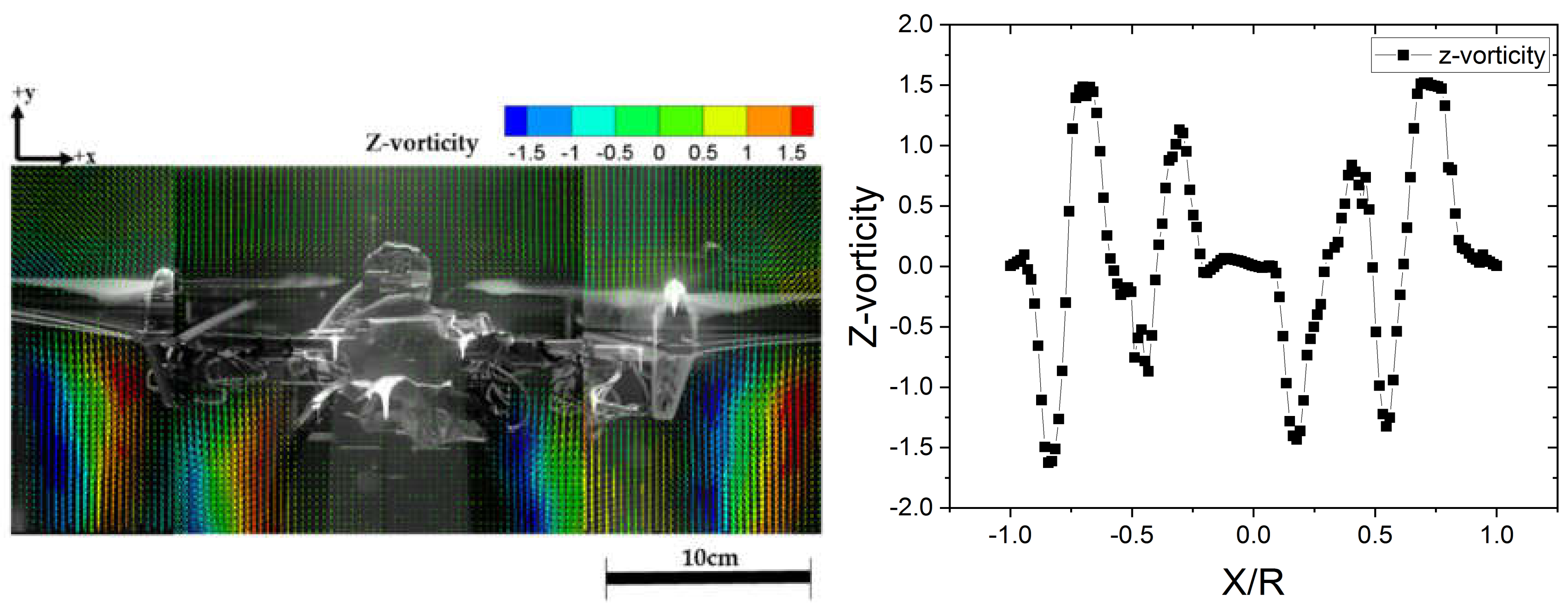
3.1.2. Vorticity Distribution
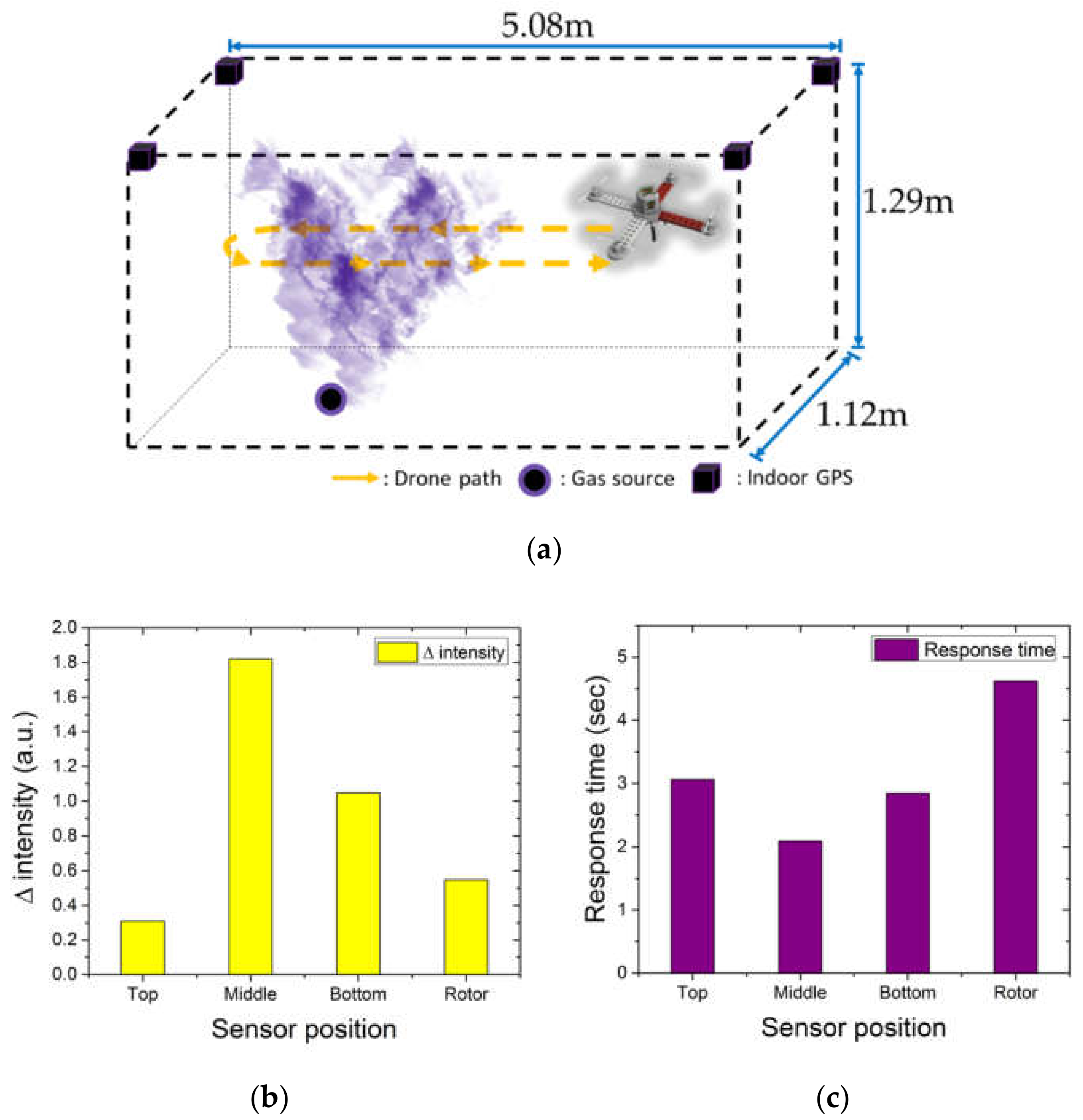
3.2. Sensor Performance Test
4. Discussion
5. Conclusions
- Visualization of the effect of the flow field around the drone
- Determination of the effect of the customized quadrotor drone structure on the flow field, and hence the magnitude of the effect of the fluid field on the chemical detection
- Adaptation of the direct drone aerodynamics feedback to a realistic experiment
- Demonstration of the feasibility of using a quadrotor drone for chemical detection.
Author Contributions
Funding
Conflicts of Interest
References
- Pobkrut, T.; Eamsa-ard, T.; Kerdcharoen, T. Sensor Drone for Aerial Odor Mapping for Agriculture and Security Services. In Proceedings of the IEEE 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 28 June–1 July 2016. [Google Scholar]
- Ding, G.; Wu, Q.; Zhang, L.; Lin, Y.; Tsiftsis, T.A.; Yao, Y.D. An Amateur Drone Surveillance System Based on the Cognitive Internet of Things. IEEE Commun. Mag. 2018, 56, 29–35. [Google Scholar]
- López, J.J.; Mulero-Pázmány, M. Drones for Conservation in Protected Areas: Present and Future. Drones 2019, 3, 10. [Google Scholar]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Gupta, S.K. Collaboration of Drone and Internet of Public Safety Things in Smart Citeis: An Overview of QoS and Network Performance Optimization. Drones 2019, 3, 13. [Google Scholar]
- Rahman, A. Enabling Drone Communications with WiMAX Technology. In Proceedings of the 2014 The 5th International Conference on Information, Intelligence, Systems and Applications, Chania, Greece, 7–9 July 2014. [Google Scholar]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultra-fine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar]
- Hii, M.S.Y.; Courtney, P.; Royall, P.G. An Evaluation of the Delivery of Medicines Using Drones. Drones 2019, 3, 52. [Google Scholar]
- Kanellakis, C.; Nikolakopoulos, G. Survey on Computer Vision for UAVs: Current Developments and Trends. J. Intell. Robot. Syst. 2017, 87, 141–168. [Google Scholar]
- Yuan, C.; Liu, Z.; Zhang, Y. Fire Detection Using Infrared Images for UAV-based Forest Fire Surveillance. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017. [Google Scholar]
- Kinaneva, D.; Hristov, G.; Raychev, J.; Zahariev, P. Early Forest Fire Detection Using Drones and Artificial Intelligence. In Proceedings of the 2019 42nd International Convection on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 20–24 May 2019. [Google Scholar]
- Coluccia, A.; Fascista, A.; Schumann, A.; Sommer, L.; Ghenescu, M.; Piatrik, T.; de Cubber, G.; Nalamati, M.; Kapoor, A.; Saqib, M.; et al. Drone-vs-Bird Detection Challenge at IEEE AVSS2019. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019. [Google Scholar]
- Rossi, M.; Brunelli, D. Autonomous Gas Detection and Mapping with Unmanned Aerial Vehicles. IEEE Trans. Instrum. Meas. 2016, 65, 765–775. [Google Scholar]
- Castro, A.; Magnezi, N.; Sintayehu, B.; Quinto, A.; Abshire, P. Odor Source Localization on a Nano Quadcopter. In Proceedings of the 2018 IEEE Biomedical Circuits and Systems Conference (BioCAS), Cleveland, OH, USA, 17–19 October 2018. [Google Scholar]
- Marinelli, W.J.; Schmit, T.; Dupuis, J.R.; Mulhall, P.; Croteau, P.; Manegold, D.; Beshay, M.; Lav, M. Cooperative use of standoff and UAV sensors for CBRNE detection. In Proceedings of the Chemical Biological, Radiological, Nuclear and Explosives (CBRNE) Sensing XVI—SPIE Defense + Security, Baltimore, MD, USA, 17 May 2015. [Google Scholar]
- Neumann, P.P.; Asadi, S.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Autonomous Gas-Sensitive Microdrone: Wind Vector Estimation and Gas Distribution Mapping. IEEE Robot. Autom. Mag. 2012, 19, 50–61. [Google Scholar]
- Restas, A. Drone Applications for Supporting Disaster Management. World J. Eng. Technol. 2015, 3, 316–321. [Google Scholar]
- Barholmai, M.; Neumann, P. Micro-Drone for Gas Measurement in Hazardous Scenarios via Remote Sensing. In Proceedings of the 6th WSEAS International conference on remote sensing (REMOTE ’10) – Selected topics in power systems and remote sensing, Takizawa, Japan, 4–6 October 2010; pp. 149–152. [Google Scholar]
- Yilmaz, E.; Hu, J. CFD Study of Quadcopter Aerodynamics at Static Thrust Conditions. In Proceedings of the ASEE Northeast 2018 Annual Conference, West Hartford, CT, USA, 27–28 April 2018. [Google Scholar]
- Atmaca, M.; Çetin, B.; Yilmaz, E. CFD Analysis of Unmanned Aerial Vehicles (UAV) Moving in Flocks. Acta Phys. Pol. A 2019, 135, 694–696. [Google Scholar]
- Thibault, S.E.; Holman, D.; Trapani, G.; Garcia, S. CFD Simulation of a Quad-Rotor UAV with Rotors in Motion Explicitly Modeled Using an LBM Approach with Adaptive Refinement. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Eu, K.S.; Yap, K.M. An exploratory study of quadrotor’s propellers impact using 3D gas dispersion simulator. In Proceedings of the ISOCS/IEEE International Symposium on Olfaction and Electronic Nose(ISOEN), Montreal, QC, Canada, 28–31 May 2017. [Google Scholar]
- Velarde, J.M.; Connors, J.N.; Berry, M.; Ali, M.Y.; Glauser, M.N. Experimental Characterization of UAS Flow Fields Through Hotwire Anemometry and PIV. In Proceedings of the 2018 Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Baker, N.T.; Carini, M.; Cornic, P.; Illoul, C.; Leclaire, B.; Losfeld, G.; Monnier, J.C.; Nowinski, V.; Verbeke, C.; Vianney, N.; et al. Tomographic PIV and pressure reconstructions on a drone wing vortex. In Proceedings of the 13th International Symposium on Particle Image Velocimetry—ISPIV 2019, Munich, Germany, 22–24 July 2019. [Google Scholar]
- Shukla, D.; Komerath, N. Drone Scale Coaxial Rotor Aerodynamic Interactions Investigation. J. Fluids Eng. 2019, 141, 071106. [Google Scholar]
- Neumann, P.; Bartholmai, M.; Schiller, J.H.; Wiggerich, B.; Manolov, M. Micro-Drone for the Characterization and Self-Optimizing Search of Hazardous Gaseous Substance Sources: A new Approach to determine Wind Speed and Direction. In Proceedings of the 2010 IEEE International Workshop on Robotic and Sensors Environments, Phoenix, AZ, USA, 15–16 October 2010. [Google Scholar]
- Tanaka, S.; Takei, Y.; Hirasawa, K.; Nanto, H. An experimental study of 3D odor plume tracking using multicopter with gas sensor array. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015. [Google Scholar]
- Sarghini, F.; de Vivo, A. Interference Anlaysis of an Heavy Lift Multirotor Drone Flow Field an Transported Spraying System. Chem. Eng. Trans. 2017, 58, 631–636. [Google Scholar]
- Shukla, D.; Komerath, N. Multirotor Drone Aerodynamic Interaction Investigation. Drones 2018, 2, 43. [Google Scholar]
- Choi, S.H.; Ankonina, G.; Youn, D.Y.; Oh, S.G.; Hong, J.M.; Rothschild, A.; Kim, I.D. Hollow ZnO Nanofibers Fabricated Using Electrospun Polymer Templates and Their Electronic Transport Properties. ACS Nano 2009, 3, 2623–2631. [Google Scholar]
- Yu, Y.H. Rotor blade-vortex interaction noise. Prog. Aerosp. Sci. 2000, 36, 97–115. [Google Scholar]
- Lee, Y.L.; Baeder, J.D. Vortex Tracking using Overset Grids for Quad Tilt Rotor in Forward Flight. In Proceedings of the 22nd Applied Aerodynamics Conference and Exhibit, Providence, RI, USA, 16–19 August 2004. [Google Scholar]
- Srinivasan, G.R.; Baeder, J.D. TURNS: A Free-Wake Euler/Navier-Stokes Numerical Method for Helicopter Rotors. AIAA J. 1993, 31, 959–967. [Google Scholar]
- Yoon, S.; Lee, H.C.; Pulliam, T.H. Computational Analysis of Multi-Rotor Flows. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Lee, H.; Lee, D.J. Prediction of Aerodynamic Noise Radiated from a Small Multicopter Unmanned Aerial Vehicle using Acoustic Analogy. Trans. Korean Soc. Noise Vib. Eng. 2019, 29, 518–526. [Google Scholar]
- Perez, A.M.; Lopez, O.; Poroseva, S.V.; Escobar, J.A. Computational Study of a Small Rotor at Hover Using CFD and UVLM. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Kim, H.W.; Brown, R.E. A Comparison of Coaxial and Conventional Rotor Performance. J. Am. Helicopter Soc. 2010, 55, 012004. [Google Scholar]
- Yang, Y.; Zhou, T.; Sciacchitano, A.; Veldhuis, L.; Eitelberg, G. Propeller and inflow vortex interaction: Vortex response and impact on the propeller performance. CEAS Aeronaut J. 2016, 7, 419–428. [Google Scholar]
- Rival, D.; Manejev, R.; Tropea, C. Measurement of parallel blade-vortex interaction at low Reynolds numbers. Exp. Fluids 2010, 49, 89–99. [Google Scholar]
- Wang, Z.; Henricks, Q.; Zhuang, M.; Pandey, A.; Sutkowy, M.; Harter, B.; McCrink, M.; Gregory, J. Impact or Rotor-Airframe Orientation on the Aerodynamic and Aeroacoustic Characteristics of Small Unmanned Aerial Systems. Drones 2019, 3, 56. [Google Scholar]
- Intaratep, N.; Alexander, W.N.; Devenport, W.J.; Grace, S.M.; Dropkin, A. Experimental Study of Quadcopter Acoustics and Performance at Static Thrust Conditions. In Proceedings of the 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May–1 June 2016. [Google Scholar]
- Tinney, C.E.; Sirohi, J. Multirotor Drone Noise at Static Thrust. AIAA J. 2018, 56, 2816–2826. [Google Scholar]
- Eu, K.S.; Yap, K.M. Chemical plume tracing: A three-dimensional technique for quadrotors by considering the altitude control of the robot in the casting stage. Int. J. Adv. Robot. Syst. 2018, 15, 1–21. [Google Scholar]
- Burques, J.; Hernandez, V.; Lilienthal, A.J.; Marco, S. Smelling Nano Aerial Vehicle for Gas Source Localization and Mapping. Sensors 2019, 19, 478. [Google Scholar]
- Cai, G.; Dias, J.; Seneviratne, L. A survey of Small-Scale Unmanned Aerial Vehicles: Recent Advances and Future Development Trends. Unmanned Syst. 2014, 2, 175–199. [Google Scholar]
- Sørensen, L.Y.; Jacobsen, L.T.; Hansen, J.P. Low Cost and Flexible UAV Deployment of Sensors. Sensors 2017, 17, 154. [Google Scholar]
- Fahad, H.M.; Shiraki, H.; Amani, M.; Zhang, C.; Hebbar, V.S.; Gao, W.; Ota, H.; Hettick, M.; Kiriya, D.; Chen, Y.Z.; et al. Room temperature multiplexed gas sensing using chemical-sensitive 3.5-nm-thin silicon transistors. Sci. Adv. 2017, 3, e1602557. [Google Scholar]
- Cascio, J.; Hale, M.; Owens, A.; Swann, S.; Weliver, A.; Jiménez, J. Creating a Decision Support Tool for the Stryker NBC RV. In Proceedings of the Annual General Donald R. Keith Memorial Conference, A Regional Conference of the Society for Industrial and Systems Engineering, West Point, NY, USA, 2 May 2019. [Google Scholar]
- Neumann, P.P.; Bennetts, V.H.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Gas source localization with a micro-drone using bio-inspired and particle filter-based algorithms. Adv. Robot. 2013, 27, 725–738. [Google Scholar]
- Neumann, P.P.; Schiller, J.H.; Lilienthal, A.J.; Alt, H.; Liers, A.; Bartholmai, M. Gas Source Localization and Gas Distribution Mapping with a Micro-Drone; BAM-Dissertationsreihe: Berlin, Germany, 2013. [Google Scholar]
- Song, S.G.; Ha, S.; Cho, H.J.; Lee, M.; Jung, D.; Han, J.H.; Song, C. Single-Walled Carbon-Nanotube-Based Chemocapacitive Sensors with Molecular Receptors for Selective Detection of Chemical Warfare Agents. Acs Appl. Nano Mater. 2018, 2, 109–117. [Google Scholar]
- Koutalakis, P.; Tzoraki, O.; Zaimes, G. UAVs for Hydrologic Scopes: Application of a Low-Cost UAV to Estimate Surface Water Velocity by Using Three Different Image-Based Methods. Drones 2019, 3, 14. [Google Scholar]
- Salih, A.; Moghavvemi, M.; Mohamed, H.A.; Gaeid, K.S. Modelling and PID Controller Design for a Quadrotor Unmanned Air Vehicle. In Proceedings of the 2010 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 28–30 May 2010. [Google Scholar]
- Čečrdle, J. Experimental research on whirl flutter. Whirl Flutter Turboprop Aircr. Struct. 2015, 1, 41–79. [Google Scholar]
- Wolf, C.C.; Schwarz, C.; Kaufmann, K.; Gardner, A.D.; Michaells, D.; Bosbach, J.; Schanz, D.; Schroder, A. Experimental study of secondary vortex structures in a rotor wake. Exp. Fluids 2019, 60, 175. [Google Scholar]
- Bontempo, R.; Manna, M. Verification of the Axial Momentum Theory for Propellers with a Uniform Load Distribution. Int. J. Turbomach. Propuls. Power 2019, 4, 1–18. [Google Scholar]
- Stokkermans, T.; Arnhem, N.V.; Veldhuis, L. Mitigation of propeller kinetic energy losses with boundary layer ingestion and swirl recovery vanes. In Proceedings of the Royal Aeronautical Society Applied Aerodynamics Coference, Bristol, UK, 19–21 July 2016. [Google Scholar]
- Wu, S.Y.; Zhou, D.Q.; Zheng, Y. Energy configuration optimization of submerged propeller in oxidation ditch based on CFD. Iop Conf. Ser. Earth Environ. Sci. 2012, 15, 1–8. [Google Scholar]
- Belyaev, I.V. The effect of an aircraft’s boundary layer on propeller noise. Acoust. Phys. 2012, 58, 387–395. [Google Scholar]
- Zhou, W.; Ning, Z.; Li, H.; Hu, H. An Experimental Investigation on Rotor-to-Rotor Interactions of Small UAV Propellers. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Ryohei, S.; Kento, T.; Hanako, I.; Saki, K.; Jane, P.R.R.; Haruka, M.; Hiroshi, I. Detection of gas drifting near the ground by drone hovering over: Using airflow generated by two connected quadcopters. Sensors 2020, 20, 1397–1413. [Google Scholar]
- Kim, J.Y.; Cho, S.Y.; Jung, H.T. Selective functionalization of high-resolution Cu2O nanopatterns via galvanic replacement for highly enhanced gas sensing performance. Sensors 2018, 18, 4438. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Quantity |
|---|---|
| Weight | 1.8 kg |
| Size | Diagonal: 45 cm, prop diameter: 12 cm, height: 25 cm |
| Payloads | LiDAR, CNT sensors, indoor GPS system, Telemetry, Flight controller |
| Communication band | 915 MHz |
| RC frequency | 2.4 GHz |
| Propulsion | 4 brushless electric motors |
| Speed | 0 to 18m/s |
| Flight controller | PX4 (model: Pixhawk 2) |
| Control Interface | GCS: Laptop, Software: QgroundControl (Dronecode Project, Inc.) |
| Top | Middle | Bottom | Rotor | |
|---|---|---|---|---|
| Response time error | 0.1531 | 0.1045 | 0.1420 | 0.2310 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Do, S.; Lee, M.; Kim, J.-S. The Effect of a Flow Field on Chemical Detection Performance of Quadrotor Drone. Sensors 2020, 20, 3262. https://doi.org/10.3390/s20113262
Do S, Lee M, Kim J-S. The Effect of a Flow Field on Chemical Detection Performance of Quadrotor Drone. Sensors. 2020; 20(11):3262. https://doi.org/10.3390/s20113262
Chicago/Turabian StyleDo, Sangwon, Myeongjae Lee, and Jong-Seon Kim. 2020. "The Effect of a Flow Field on Chemical Detection Performance of Quadrotor Drone" Sensors 20, no. 11: 3262. https://doi.org/10.3390/s20113262
APA StyleDo, S., Lee, M., & Kim, J. -S. (2020). The Effect of a Flow Field on Chemical Detection Performance of Quadrotor Drone. Sensors, 20(11), 3262. https://doi.org/10.3390/s20113262