A Non-linear Model Predictive Control Based on Grey-Wolf Optimization Using Least-Square Support Vector Machine for Product Concentration Control in l-Lysine Fermentation




Abstract
:1. Introduction
2. Material and Methods
2.1. Model Predictive Control (MPC)
- Calculate output at the current time and calculate future outputs up to the prediction horizon .
- Construct an objective function using predicted and reference values over a prediction and control horizon.
- Minimize objective function to calculate optimal values of future inputs .
- Apply the first predicted input and discard all other future input values. Repeat the whole process at next sampling time .
2.2. Least-Square Support Vector Machine (LSSVM)
2.3. Grey-Wolf Optimization (GWO)
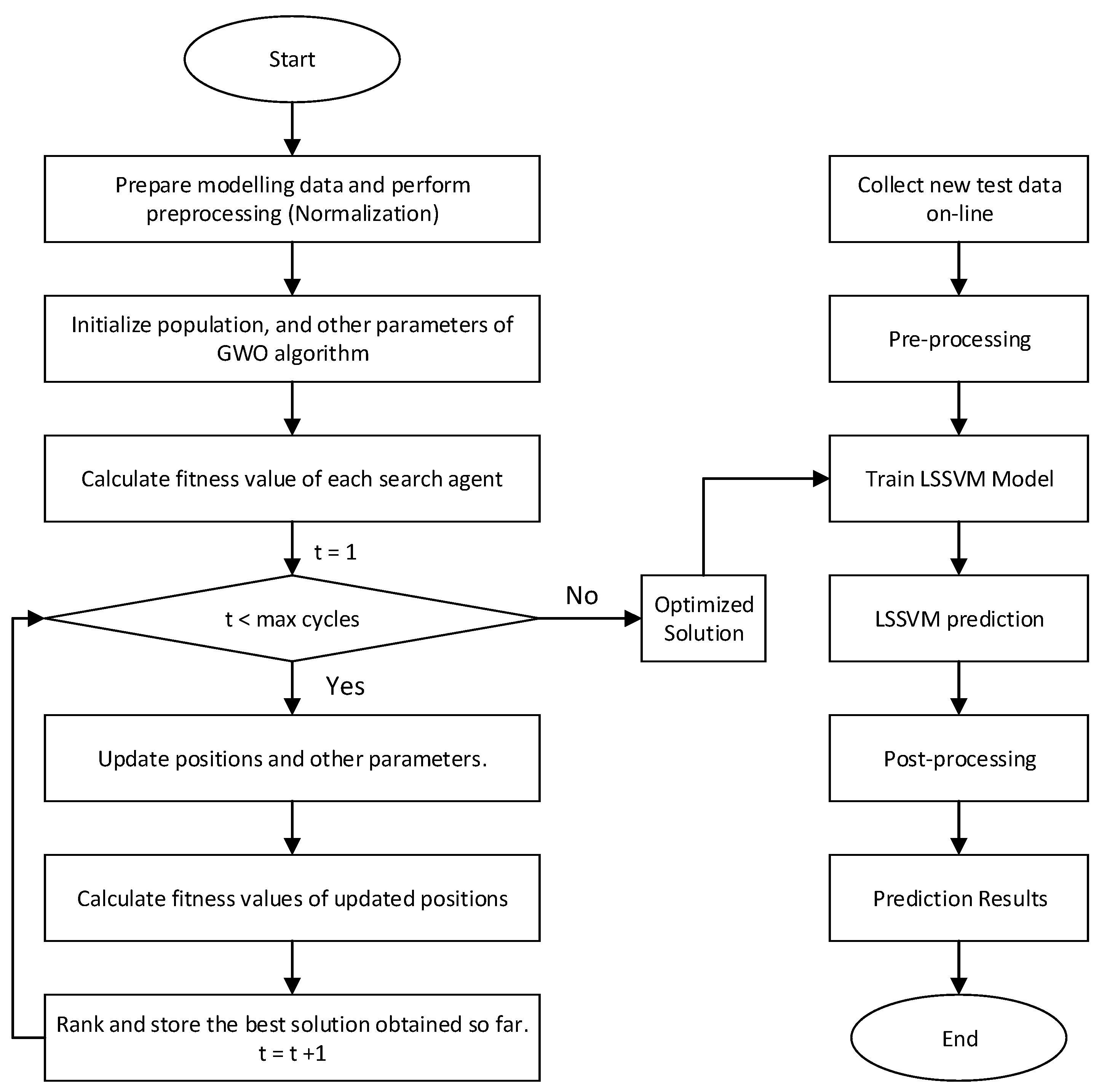
2.4. GWO-LSSVM Prediction Model
- Step 1:
- Prepare train, test, cross-validation data and perform pre-processing (normalization). Define number of search agents, maximum iterations, dimension of parameters to be optimized, lower and upper bounds.
- Step 2:
- Randomly initialize alpha, beta, delta and omega positions, and , , and . Train LSSVM model on training data using these positions as ‘g’ and ‘’ value.
- Step 3:
- Calculate fitness value of each search agent position. The fitness value corresponds to prediction accuracy of trained model on cross-validation data, which is calculated using user defined fitness function. In this study, RMSE is used as a fitness function given in Equation (22).
- Step 4:
- Step 5:
- Calculate again the fitness value of all updated positions.
- Step 6:
- Rank and store the best solution obtained so far using fitness value. Repeat from step (4) to step (6) until maximum cycles are reached.
- Step 7:
- Train again LSSVM model with best solution obtained from above steps and check the prediction accuracy on new test data to verify again model functionality.
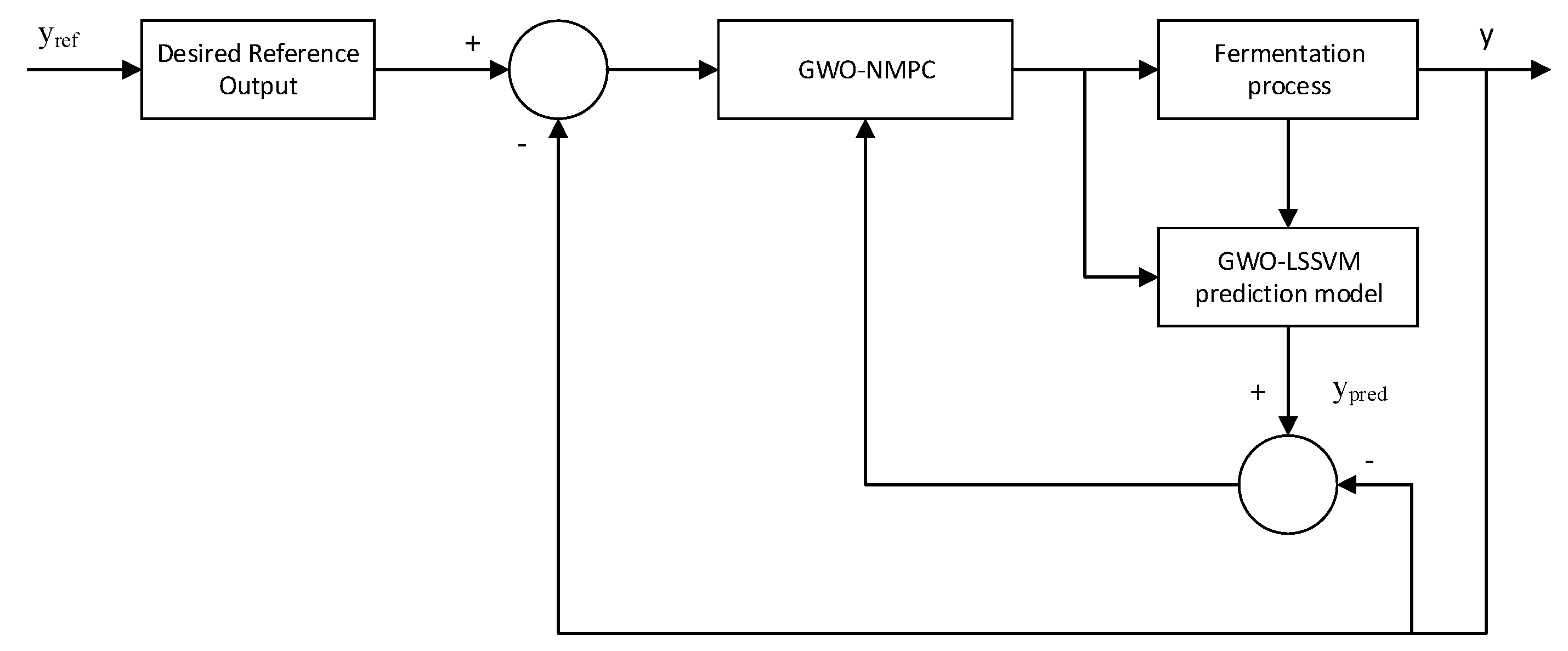
2.5. GWO-NMPC Control Algorithm
- Step 1:
- Control input variables, output variable and reference trajectory are defined.
- Step 2:
- The constraints on inputs, input increments and outputs are defined.
- Step 3:
- The control objective is accomplished by using an objective function as in Equation (1).
- Step 4:
- In objective function, the predicted output ‘’ is estimated by using proposed GWO-LSSVM model.
- Step 5:
- For each sampling interval, GWO optimizes the objective function and calculates the optimum values of control input increment .
- Step 6:
- The future control inputs are calculated by using following equation:where t, u, represent current sampling time, control input and control increment, respectively.
- Step 7:
- Finally, calculated input is applied to the process and output feedback strategy is employed.
2.6. Experimental Setup
- In a 30 L mechanical stirring fermenter, fed-batch fermentation was conducted. The environmental parameters and physical parameters in the fermentation process were collected in real time by a digital measurement and control system composed of ARM development platform, and transmitted to the industrial control computer in the control room via a serial communication line. The time period for every batch was 72-h and the sampling time period was 15 min. The auxiliary inputs (such as temperature T, , agitation speed rate , dissolved oxygen , air flow rate and acceleration rate of ammonia flow ) were collected in real time. The key variable product concentration ‘P’ was sampled after every 2-h and tested in laboratory off-line. After this, the key biochemical variable was transformed from 2-h sampled data to 15 min sampled data (consistent with the number of auxiliary inputs data) in MATLAB using the “spline” interpolation function interp1 (https://www.mathworks.com/help/matlab/ref/interp1.html). P was determined by the modified ninhydrin colorimetric method, i.e., 2 ml of the supernatant and 4 ml of the ninhydrin reagent were mixed and heated in boiling water for 20 min. The absorbance at 475 mm was measured by a spectrophotometer after cooling and obtained by checking the standard l-Lysine curve. These inputs represent the inputs ‘x’ in Equations (3)–(9). In addition, the product concentration ‘P’ represents the output ‘y’ in Equations (3)–(9). A non-linear mapping function is estimated using LSSVM between these inputs and output.
- Ten batches were used for testing the modeling competence of the GWO-LSSVM method. The initial conditions between batches were set differently and the feeding strategy was also changed to enhance the differences between batches. The pressure of the fermentation tank was set to 0 ∽ 0.25 MPa, the temperature of fermentation was adjusted to 0 ∽ 50 °C ± 0.5 °C and the dissolved oxygen electrode was calibrated for the reference reading when the stirring motor was rotating at 400 rpm.
2.7. Performance Evaluation Metrics
3. Results and Discussion
3.1. GWO-LSSVM Results Analysis
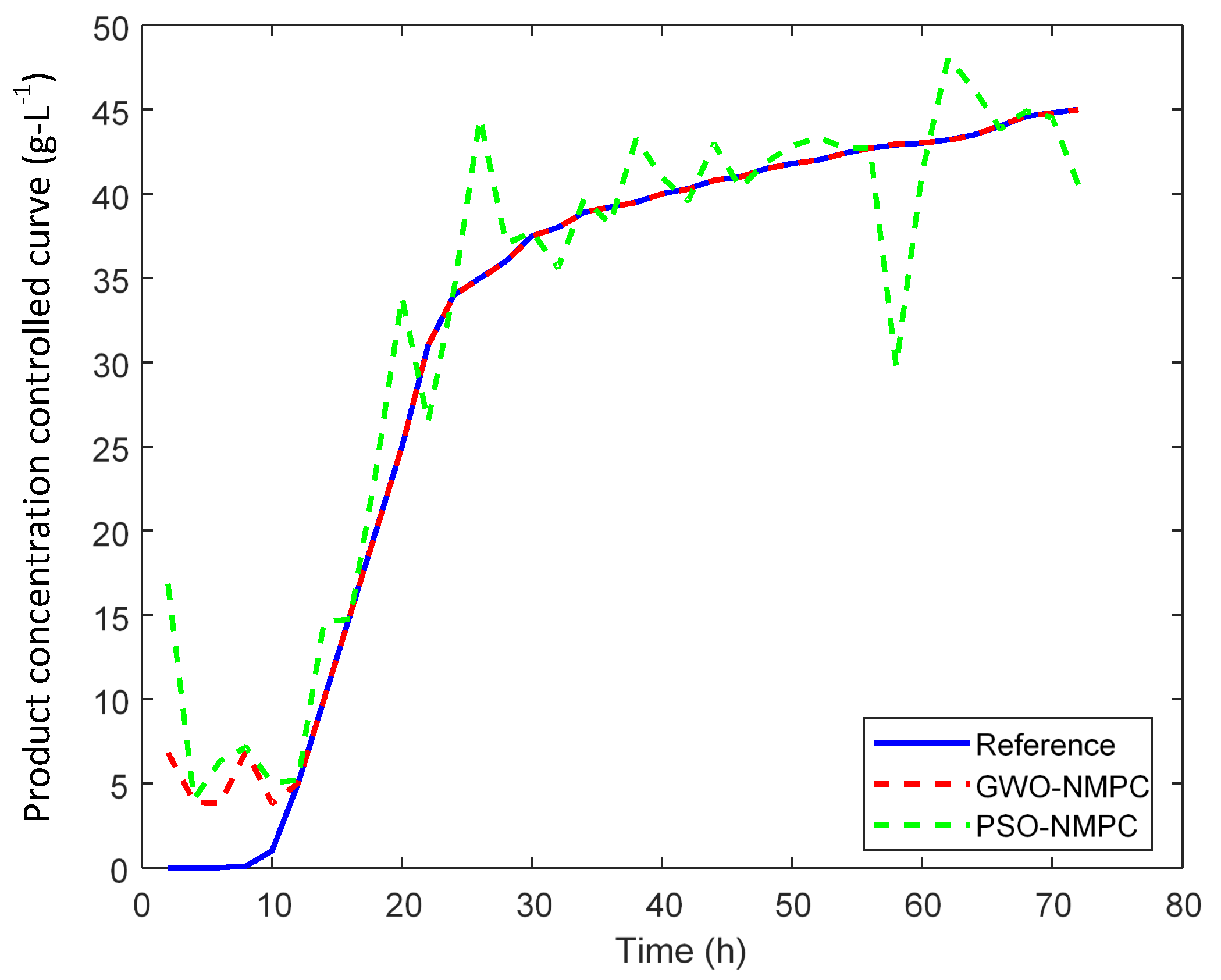
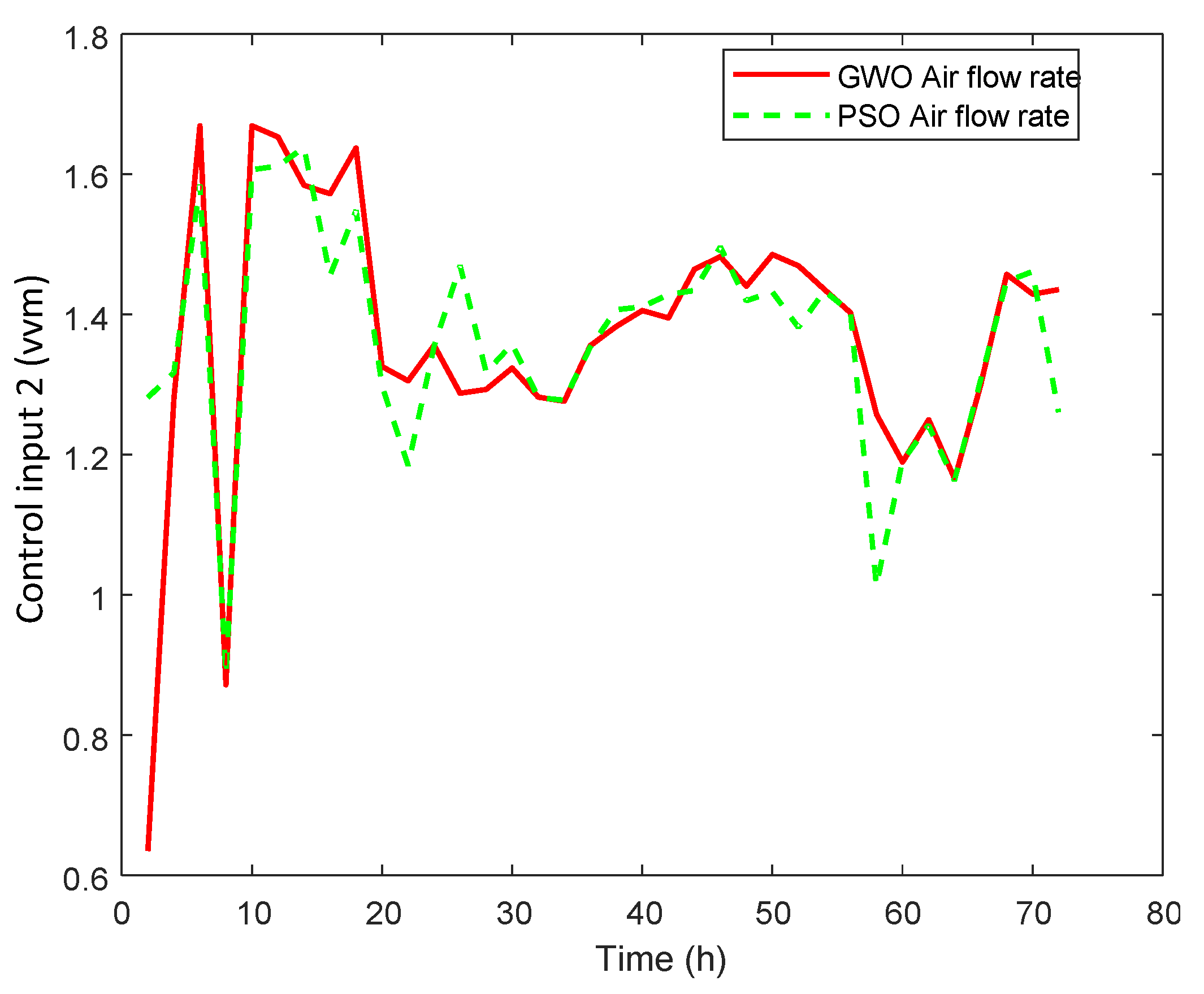
3.2. GWO-NMPC Results Analysis
3.2.1. Hypothetical Case Study
3.2.2. Real Case Study
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| NMPC | Non-linear Model Predictive Control |
| SVM | Support Vector Machine |
| LSSVM | Least-Square SVM |
| GWO | Grey-Wolf Optimization |
| PSO | Particle Swarm Optimization |
| ANN | Artificial Neural Network |
| QP | Quadratic Programming |
| ABC | Artificial Bee Colony |
| CS | Cuckoo Search |
| FFA | Firefly Algorithm |
| BA | Bat Algorithm |
| FPA | Flower Pollination Algorithm |
| GSA | Gravitational Search Algorithm |
| DE | Differential Evolution |
| EP | Evolutionary Programming |
| ES | Evolution strategy |
| NFL | No Free Lunch |
| GPC | Generalized Predictive Control |
| NP | Non-linear Programming |
| KKT | Karush–Kuhn–Tucker conditions |
| NP | Non-linear Programming |
| RMSE | Root Mean Square Error |
| MAE | Mean Absolute Error |
| MAPE | Mean Absolute Percentage Error |
| ml | Milliliter |
| mm | Millimeter |
| rpm | Revolutions per minute |
| MPa | Megapascal |
| vvm | Volume per Unit per Minute |
References
- Eren, U.; Prach, A.; Koçer, B.B.; Raković, S.V.; Kayacan, E.; Açıkmeşe, B. Model predictive control in aerospace systems: Current state and opportunities. J. Guid. Control Dyn. 2017, 40, 1541–1566. [Google Scholar] [CrossRef]
- Muhammad, D.; Ahmad, Z.; Aziz, N. Low density polyethylene tubular reactor control using state space model predictive control. Chem. Eng. Commun. 2019, 1–17. [Google Scholar] [CrossRef]
- Wang, X.; Ratnaweera, H.; Holm, J.A.; Olsbu, V. Statistical monitoring and dynamic simulation of a wastewater treatment plant: A combined approach to achieve model predictive control. J. Environ. Manag. 2017, 193, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model predictive control for power converters and drives: Advances and trends. IEEE Trans. Ind. Electron. 2016, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Afram, A.; Janabi-Sharifi, F.; Fung, A.S.; Raahemifar, K. Artificial neural network (ANN) based model predictive control (MPC) and optimization of HVAC systems: A state of the art review and case study of a residential HVAC system. Energy Build. 2017, 141, 96–113. [Google Scholar] [CrossRef]
- Wang, D.; Shen, J.; Zhu, S.; Jiang, G. Model predictive control for chlorine dosing of drinking water treatment based on support vector machine model. Desalin. Water Treat. 2020, 173, 133–141. [Google Scholar] [CrossRef]
- Yokota, A.; Ikeda, M. Amino Acid Fermentation; Springer: Tokyo, Japan, 2017. [Google Scholar]
- Félix, F.K.d.C.; Letti, L.A.J.; Vinícius de Melo Pereira, G.; Bonfim, P.G.B.; Soccol, V.T.; Soccol, C.R. l-Lysine production improvement: A review of the state of the art and patent landscape focusing on strain development and fermentation technologies. Crit. Rev. Biotechnol. 2019, 39, 1031–1055. [Google Scholar] [CrossRef] [PubMed]
- Razak, M.A.; Viswanath, B. Optimization of fermentation upstream parameters and immobilization of Corynebacterium glutamicum MH 20-22 B cells to enhance the production of l-Lysine. 3 Biotech 2015, 5, 531–540. [Google Scholar] [CrossRef] [Green Version]
- Gustavsson, R. Development of Soft Sensors for Monitoring and Control of Bioprocesses; Linköping University Electronic Press: Linköping, Sweden, 2018. [Google Scholar]
- Ahuja, K.; Pani, A.K. Software sensor development for product concentration monitoring in fed-batch fermentation process using dynamic principal component regression. In Proceedings of the 2018 International Conference on Soft-computing and Network Security (ICSNS), Coimbatore, India, 14–16 February 2018; pp. 1–6. [Google Scholar]
- Yuan, X.; Li, L.; Wang, Y. Nonlinear dynamic soft sensor modeling with supervised long short-term memory network. IEEE Trans. Ind. Inform. 2020, 16, 3168–3176. [Google Scholar] [CrossRef]
- Grahovac, J.; Jokić, A.; Dodić, J.; Vučurović, D.; Dodić, S. Modelling and prediction of bioethanol production from intermediates and byproduct of sugar beet processing using neural networks. Renew. Energy 2016, 85, 953–958. [Google Scholar] [CrossRef]
- Datta, A.; Augustin, M.; Gupta, N.; Viswamurthy, S.; Gaddikeri, K.M.; Sundaram, R. Impact Localization and Severity Estimation on Composite Structure Using Fiber Bragg Grating Sensors by Least Square Support Vector Regression. IEEE Sens. J. 2019, 19, 4463–4470. [Google Scholar] [CrossRef]
- Wang, G.; Xu, B.; Jiang, W. SVM modeling for glutamic acid fermentation process. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May2016; pp. 5551–5555. [Google Scholar]
- Zhang, Y.; Le, J.; Liao, X.; Zheng, F.; Li, Y. A novel combination forecasting model for wind power integrating least square support vector machine, deep belief network, singular spectrum analysis and locality-sensitive hashing. Energy 2019, 168, 558–572. [Google Scholar] [CrossRef]
- Luo, C.; Huang, C.; Cao, J.; Lu, J.; Huang, W.; Guo, J.; Wei, Y. Short-term traffic flow prediction based on least square support vector machine with hybrid optimization algorithm. Neural Process. Lett. 2019, 50, 2305–2322. [Google Scholar] [CrossRef]
- Robles-Rodriguez, C.E.; Bideaux, C.; Roux, G.; Molina-Jouve, C.; Aceves-Lara, C.A. Soft-sensors for lipid fermentation variables based on PSO Support Vector Machine (PSO-SVM). In Distributed Computing and Artificial Intelligence, Proceedings of the 13th International Conference, Salamanca, Spain, 28–30 March 2020; Springer: Berlin, Germany, 2016; pp. 175–183. [Google Scholar]
- Xue, X.; Xiao, M. Deformation evaluation on surrounding rocks of underground caverns based on PSO-LSSVM. Tunn. Undergr. Space Technol. 2017, 69, 171–181. [Google Scholar] [CrossRef]
- Zhu, X.; Rehman, K.U.; Wang, B.; Shahzad, M. Modern Soft-Sensing Modeling Methods for Fermentation Processes. Sensors 2020, 20, 1771. [Google Scholar] [CrossRef] [Green Version]
- Saad, A.E.H.; Dong, Z.; Karimi, M. A comparative study on recently-introduced nature-based global optimization methods in complex mechanical system design. Algorithms 2017, 10, 120. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Zhu, Z. The generalized predictive control of bacteria concentration in marine lysozyme fermentation process. Food Sci. Nutr. 2018, 6, 2459–2465. [Google Scholar] [CrossRef]
- Nisha, M.G.; Prince, M.J.R.; Jones, A.J. Neural Network Predictive Control of Systems with Faster Dynamics using PSO. In Proceedings of the 2019 International Conference on Recent Advances in Energy-Efficient Computing and Communication (ICRAECC), Nagercoil, India, 7–8 March 2019; pp. 1–4. [Google Scholar]
- Ait Sahed, O.; Kara, K.; Hadjili, M.L. Constrained fuzzy predictive control using particle swarm optimization. Appl. Comput. Intell. Soft Comput. 2015. [Google Scholar] [CrossRef]
- Su, T.J.; Tsou, T.Y.; Vu, H.Q.; Shyr, W.J. Model Predictive Control Design Based on Particle Swarm Optimization. J. Converg. Inf. Technol. 2015, 10, 70. [Google Scholar]
- Suthar, S.; Vishwakarma, D. A Fast Converging MPPT Control Technique (GWO) for PV Systems Adaptive to Fast Changing Irradiation and Partial Shading Conditions. Available online: https://d1wqtxts1xzle7.cloudfront.net/60428554/IRJET-V6I650220190829-75962-1sorde7.pdf (accessed on 8 June 2020).
- Chen, L.; Du, S.; He, Y.; Liang, M.; Xu, D. Robust model predictive control for greenhouse temperature based on particle swarm optimization. Inf. Process. Agric. 2018, 5, 329–338. [Google Scholar] [CrossRef]
- Kouvaritakis, B.; Cannon, M. Model Predictive Control; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Suykens, J.A.; Vandewalle, J. Least squares support vector machine classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Azimi, H.; Bonakdari, H.; Ebtehaj, I. Design of radial basis function-based support vector regression in predicting the discharge coefficient of a side weir in a trapezoidal channel. Appl. Water Sci. 2019, 9, 78. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Guo, T.; Hao, W.; Guo, Q. Predicting Model based on LS-SVM for Inulinase Concentration during Pichia Pastoris’ Fermentation Process. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 1531–1536. [Google Scholar]
- Huang, L.; Wang, Z.; Ji, X. LS-SVM Generalized Predictive Control Based on PSO and Its Application of Fermentation Control. In Proceedings of the 2015 Chinese Intelligent Systems Conference; Springer: Berlin/Heidelberg, Germany, 2016; pp. 605–613. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | RMSE | MAE | MAPE |
|---|---|---|---|
| GWO-LSSVM | 0.136918 | 0.047230 | 0.703616 |
| PSO-LSSVM | 0.355483 | 0.212182 | 1.244831 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Shahzad, M.; Zhu, X.; Rehman, K.U.; Uddin, S. A Non-linear Model Predictive Control Based on Grey-Wolf Optimization Using Least-Square Support Vector Machine for Product Concentration Control in l-Lysine Fermentation. Sensors 2020, 20, 3335. https://doi.org/10.3390/s20113335
Wang B, Shahzad M, Zhu X, Rehman KU, Uddin S. A Non-linear Model Predictive Control Based on Grey-Wolf Optimization Using Least-Square Support Vector Machine for Product Concentration Control in l-Lysine Fermentation. Sensors. 2020; 20(11):3335. https://doi.org/10.3390/s20113335
Chicago/Turabian StyleWang, Bo, Muhammad Shahzad, Xianglin Zhu, Khalil Ur Rehman, and Saad Uddin. 2020. "A Non-linear Model Predictive Control Based on Grey-Wolf Optimization Using Least-Square Support Vector Machine for Product Concentration Control in l-Lysine Fermentation" Sensors 20, no. 11: 3335. https://doi.org/10.3390/s20113335
APA StyleWang, B., Shahzad, M., Zhu, X., Rehman, K. U., & Uddin, S. (2020). A Non-linear Model Predictive Control Based on Grey-Wolf Optimization Using Least-Square Support Vector Machine for Product Concentration Control in l-Lysine Fermentation. Sensors, 20(11), 3335. https://doi.org/10.3390/s20113335