Foreign Object Intrusion Detection on Metro Track Using Commodity WiFi Devices with the Fast Phase Calibration Algorithm †



Abstract
:1. Introduction
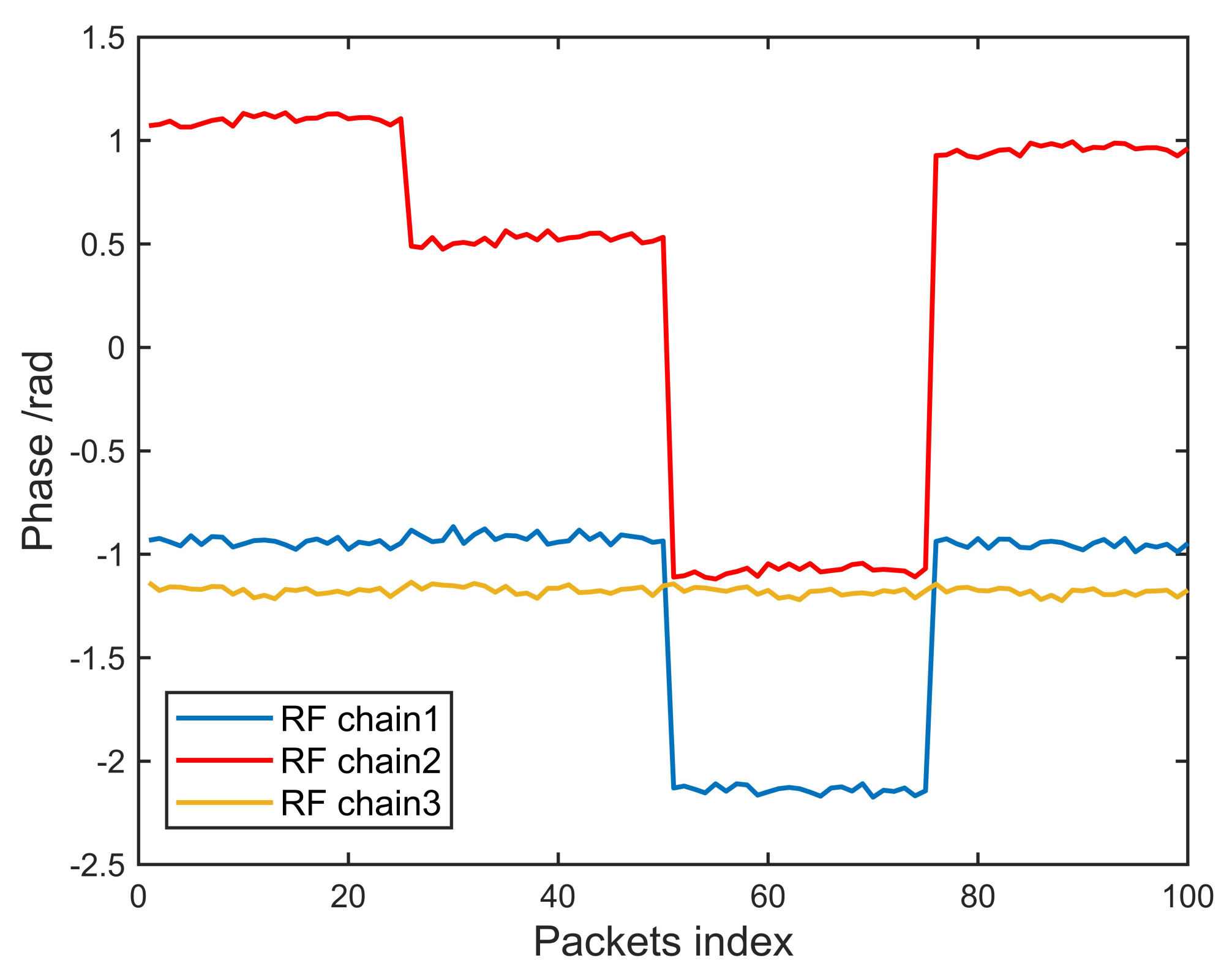
- The MIMO technology introduced by IEEE 802.11n enables the WiFi network card to have the hardware basis for AoA estimation of the target using CSI phase information. However, in a MIMO antenna array, each antenna corresponds to an RF chain. The unsynchronized clocks between the RF chains result in an abnormal random phase difference between different antennas; that is, a phase offset. Therefore, to implement the method proposed in our conference paper on actual hardware, phase calibration must be performed first to eliminate the phase offset. The Phaser [27] is literature that first proposed a method to solve the phase offset of WiFi NICs, but its algorithm is complicated, and the calibration time is long. In Section 3.2, we give the analysis and comparison of the time complexity of our proposed algorithm and the algorithm. The literature [28] proposed a simple phase calibration method. However, this paper only sets the scene containing a single device-based target to verify the effectiveness of the proposed method. At the same time, the phase offset value they observed is fixed at , which may be true under certain conditions. However, our experiments found that this phase offset value is random.
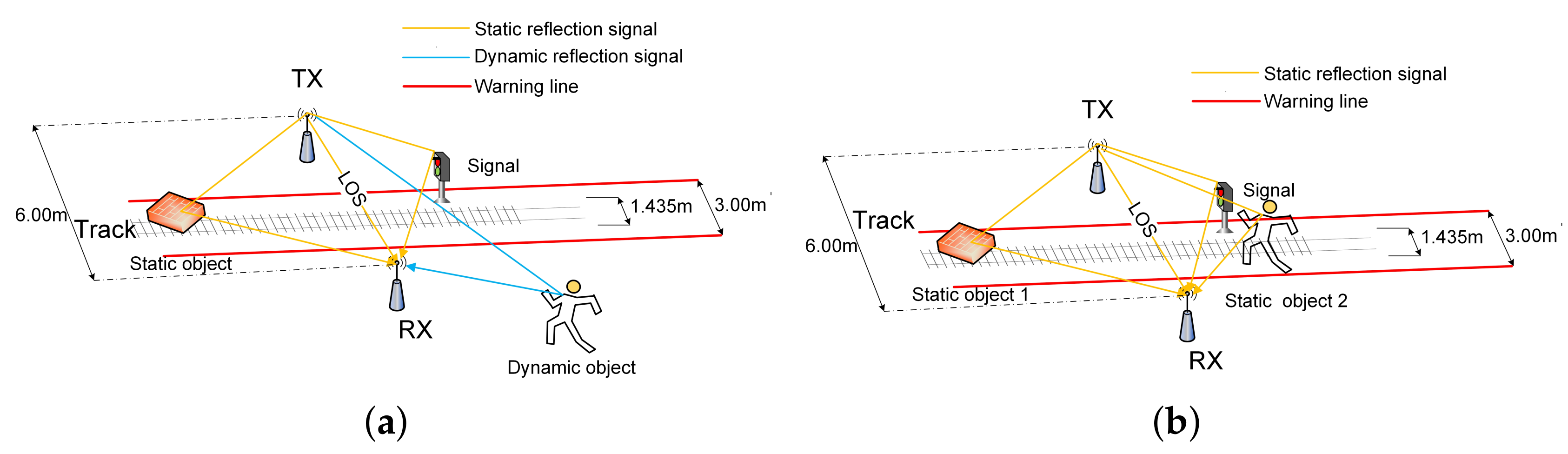
- The detection and tracking of foreign objects are achieved by acquiring and analyzing the reflected signals caused by foreign objects. However, in real scenes, besides the line of sight (LOS) signal path between the receiver and the transmitter, and the reflection path caused by intruding foreign objects, there are also many reflection paths caused by walls and non-target objects. The existence of these reflection paths seriously affects the detection and tracking of intruding foreign objects. Therefore, ensuring the accuracy of foreign object detection and tracking in a real scene with multiple signal paths is one of the core problems that needs to be solved.
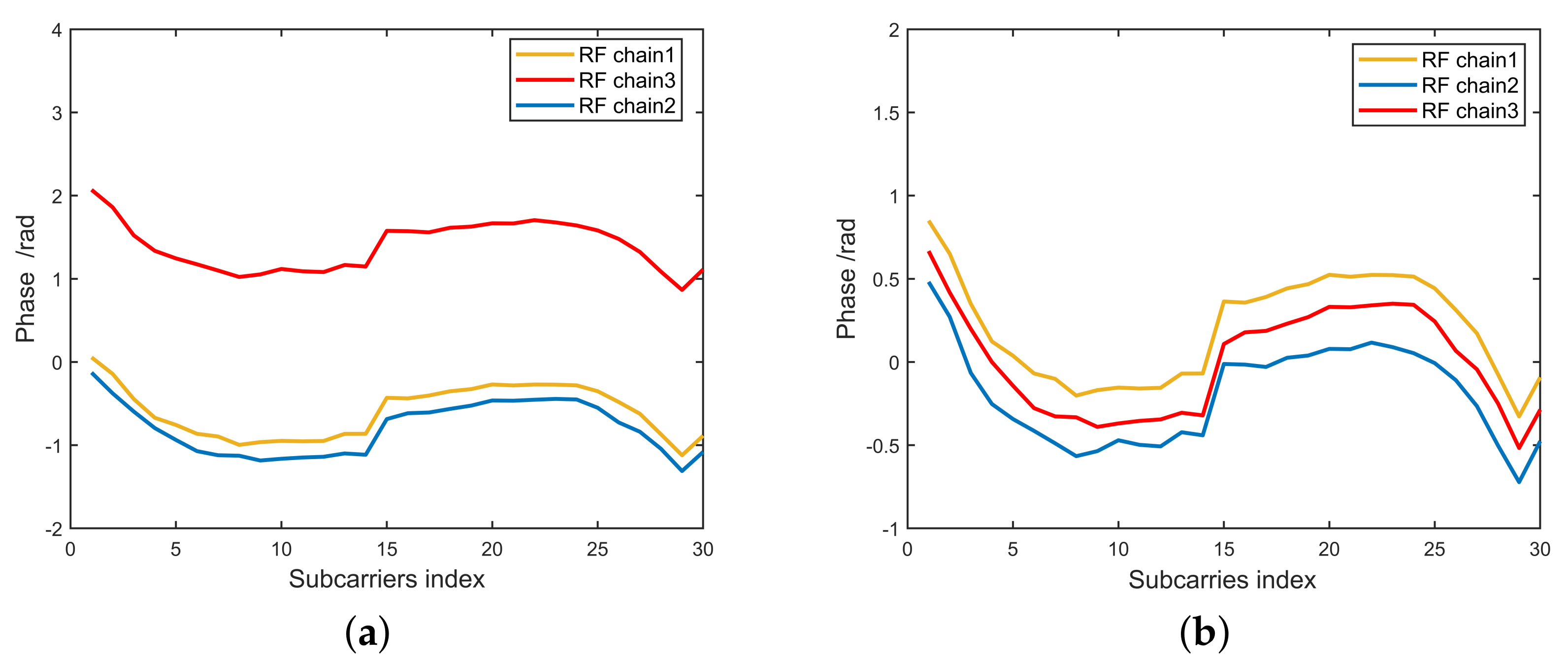
- Fast phase calibration algorithm. A fast phase calibration algorithm is proposed based on the law of phase offset observed from the results of extensive experiments. The algorithm calculates the CSI phase offset matrix based on the AoA information of the direct path between the transmitter and the receiver to implement automatic phase calibration. Compared with other phase calibration algorithms, this algorithm has a lower time complexity, which is ; M is the number of antennas, and N is the number of subcarriers. The theoretical basis for phase calibration based on CSI data is given in Section 3.2.
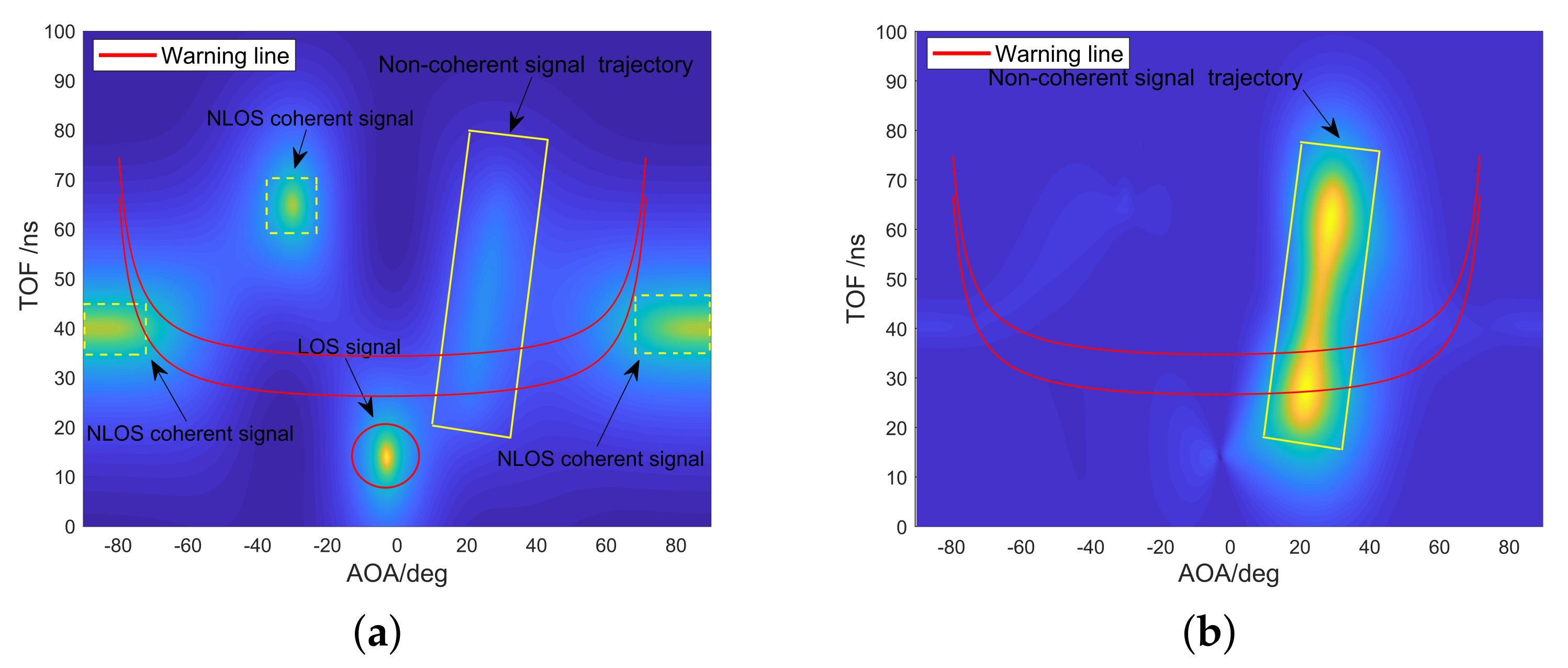
- MUSIC algorithm based on static clutter suppression. Based on the in-depth analysis of the change of radio frequency signals in the process of foreign objects intrusion, using the non-coherence between the static path signal and the dynamic reflection signal caused by the foreign objects intrusion, a MUSIC algorithm without spatial smoothing is proposed. Without spatial smoothing, static path signals that are coherent are superimposed into one signal, thereby significantly reducing the total number of signals (paths) and improving the efficiency of foreign object detection and tracking. Simultaneously, combined with static clutter suppression technology, the algorithm’s adaptability to the environment is enhanced.
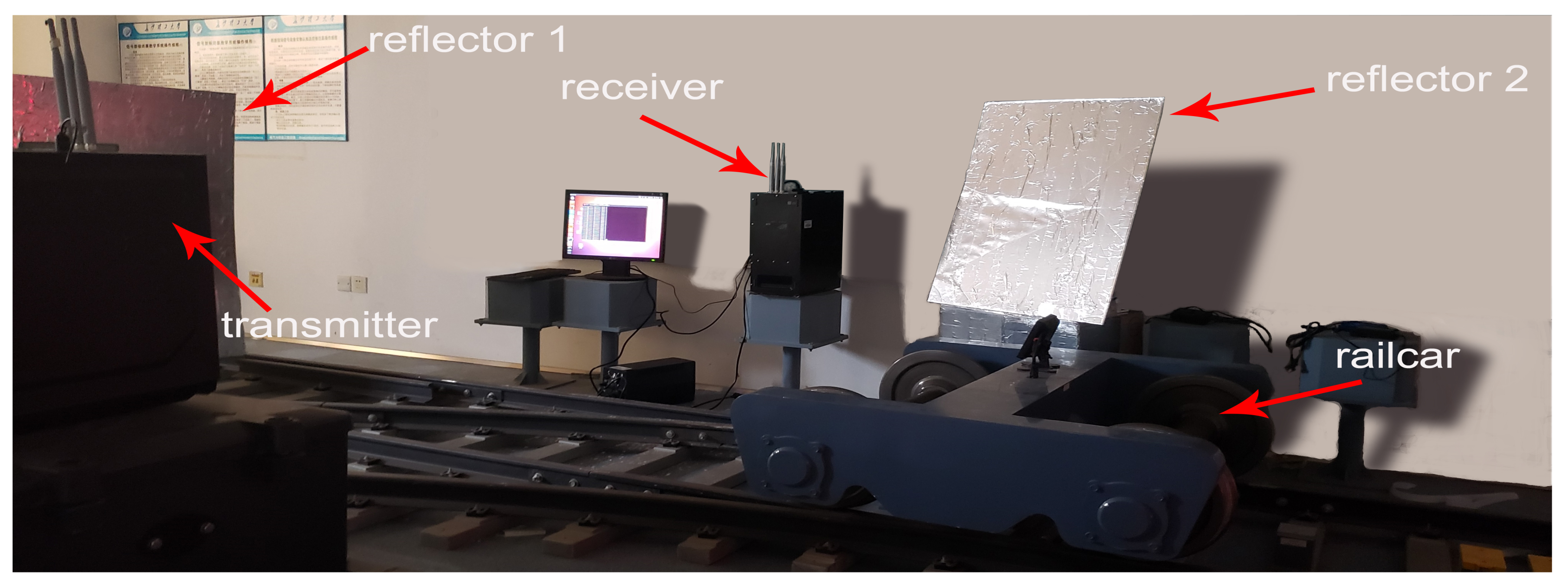
- The intrusion detection system is implemented with the commercial intel 5300 WiFi NIC, and only a pair of transceivers are required. That is a system that integrates sensing and communication. When a foreign object is detected, the intrusion information can be sent to the control center through the communication link.
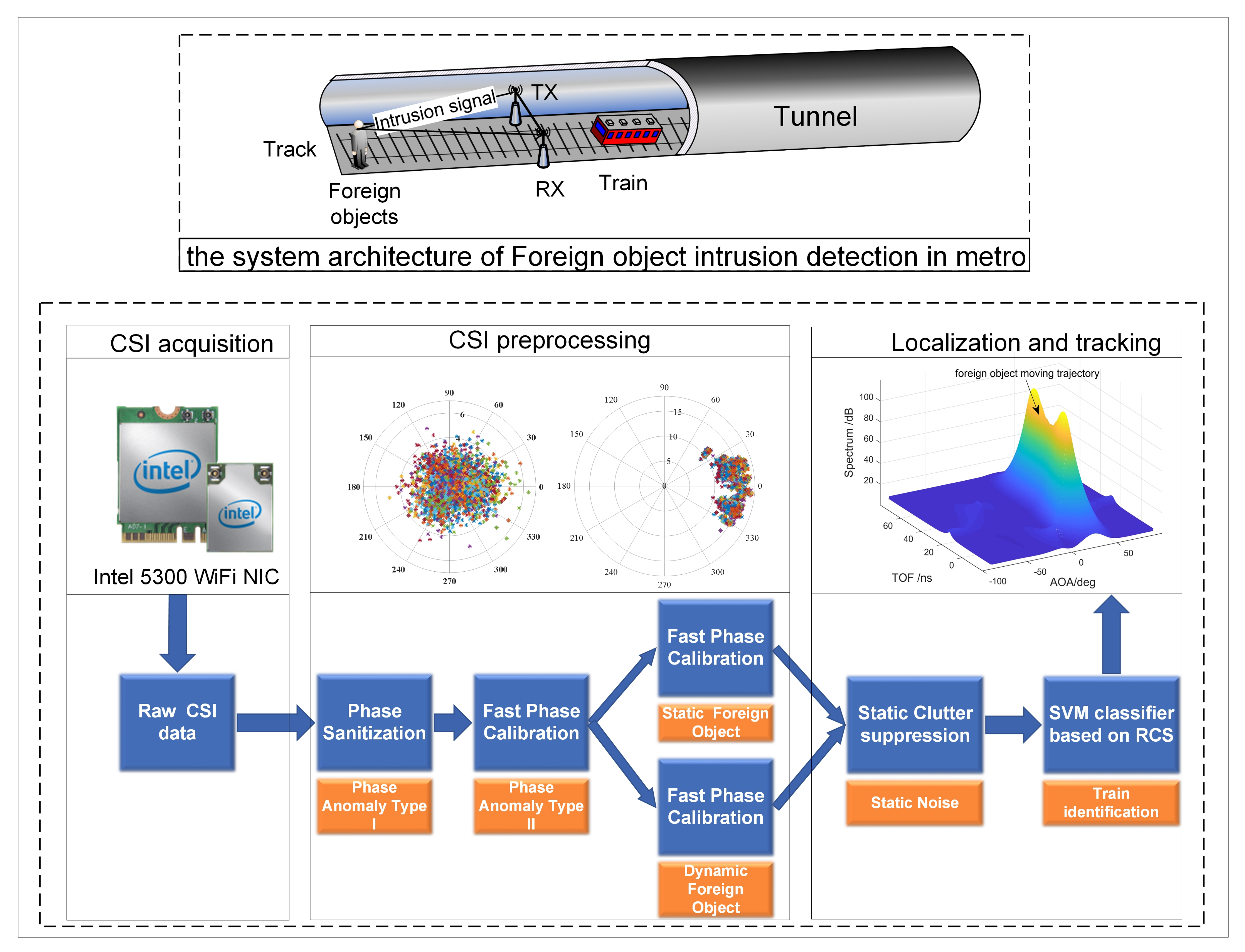
2. System Architecture
- CSI acquisition. CSI could provide detailed channel frequency response information on multiple channels in the physical layer. In our system, Intel 5300 NIC and CSI Tool firmware [10,11] are used to obtain CSI. However, because the clock is not synchronized, there is a phase abnormality in the raw CSI data collected directly, which cannot be used by the positioning algorithm.
- The CSI preprocessing module implements the correction of the phase anomalies in the raw CSI data. There are two types of phase anomalies.Phase anomaly type I. The first type of phase anomaly is caused by the unsynchronized clock between the receiver and the transmitter. The phase sanitization algorithm in SpotFi [18] is used to correct it.Phase anomaly type II. The second type of phase anomaly is caused by the unsynchronized clocks between the receiver’s RF chains and is called an abnormal phase offset. It can be corrected by the fast phase calibration algorithm proposed in this paper. The algorithm is described in detail in Section 3.
- Localization and tracking of foreign objects. In this module, based on the MIMO and OFDM technologies of the Intel 5300 NIC, the MUSIC algorithm is used to process the calibrated CSI data to realize the estimation of the AoA and distances of foreign objects, and to locate and track the foreign objects in real-time. A spatial smoothing strategy for scene matching is proposed to improve the utilization of sensors (antennas and subcarriers) through an in-depth analysis of the relationship between the motion state of foreign objects and signal coherence efficiency of foreign object detection. Besides, by introducing static clutter suppression technology, the algorithm’s anti-interference and environmental adaptability are improved. Finally, the radar cross section (RCS) data set of foreign objects and trains is constructed based on simulation, and the classification of foreign objects and trains is realized by using the SVM algorithm. The detailed explanation is in Section 4.
3. Cause and Calibration Method of Phase Abnormality
3.1. Phase Anomaly Induced by Clock Non-Synchronization between RF Chains on a WiFi NIC
3.2. Fast Phase Calibration Algorithm
| Algorithm 1 The fast phase calibration algorithm. |
| Input: the AoA of the LOS path , raw matrix obtained by the CSI Tool [10], antenna spacing d, subcarrier center frequency f |
| Output: matrix |
|
4. Localizing the Foreign Object
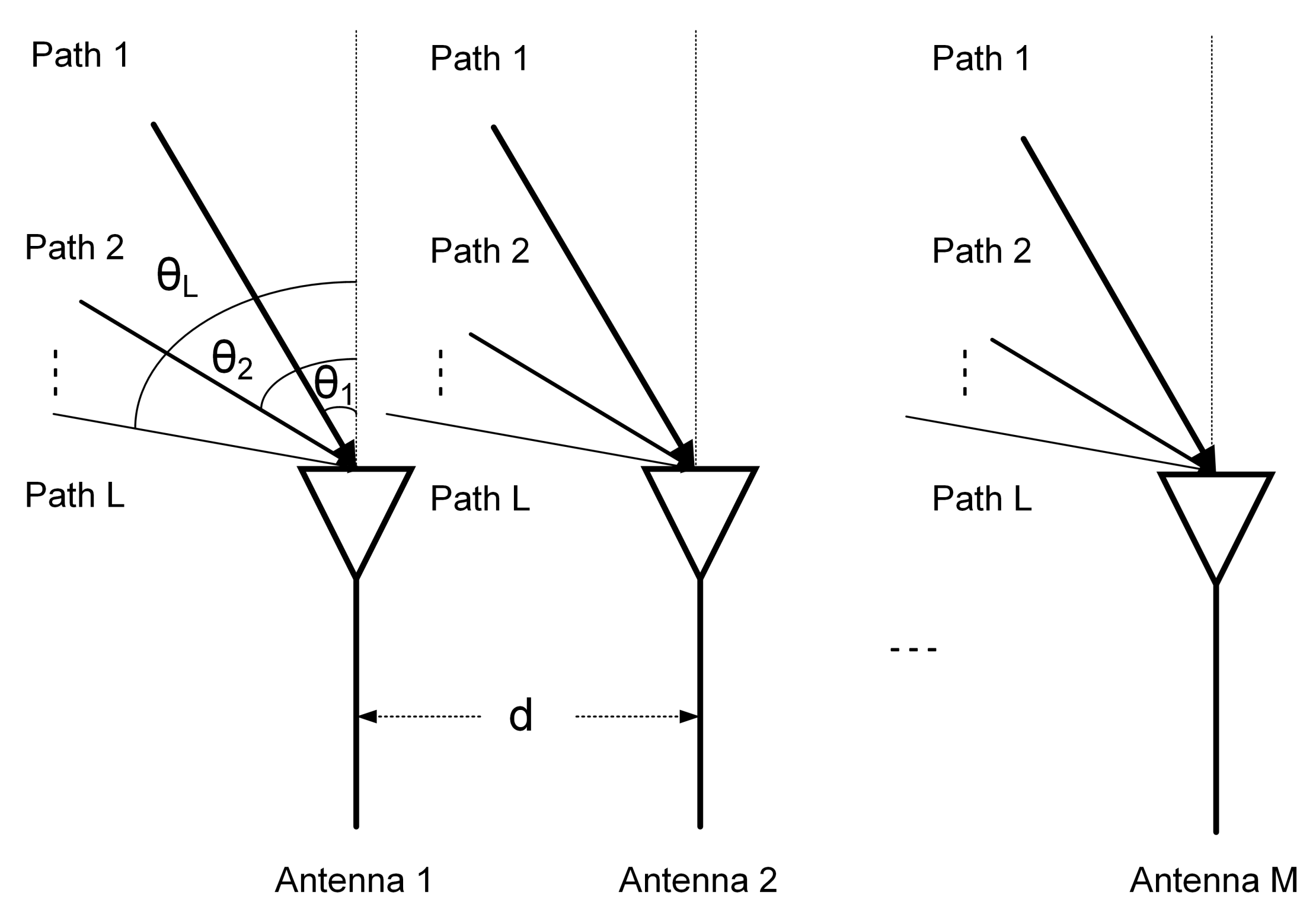
4.1. Propagation Paths Number and Super-Resolution AoA Estimation
4.2. Target Distance and Location Estimation
- Distance estimation. The use of the CSI amplitude as the signal energy attenuation to construct the distance-energy attenuation model. There are three kinds of energy attenuation from transmitter i to receiver j of signals in wireless communications: propagation attenuation , diffraction attenuation , and target t absorption attenuation . All the , , and are the functions of the distance from transmitter i to target t and the distance from target t to receiver j. Thus, the amplitude attenuation of CSI denoted by can be expressed by:The non line of sight (NLOS) in Equation (13) denotes that the foreign object appears in the NLOS path, while LOS denotes that the foreign object appears in the LOS path. Thus, the amplitude attenuation of CSI is a function of and , . Then we get the distance to locate the foreign objects.
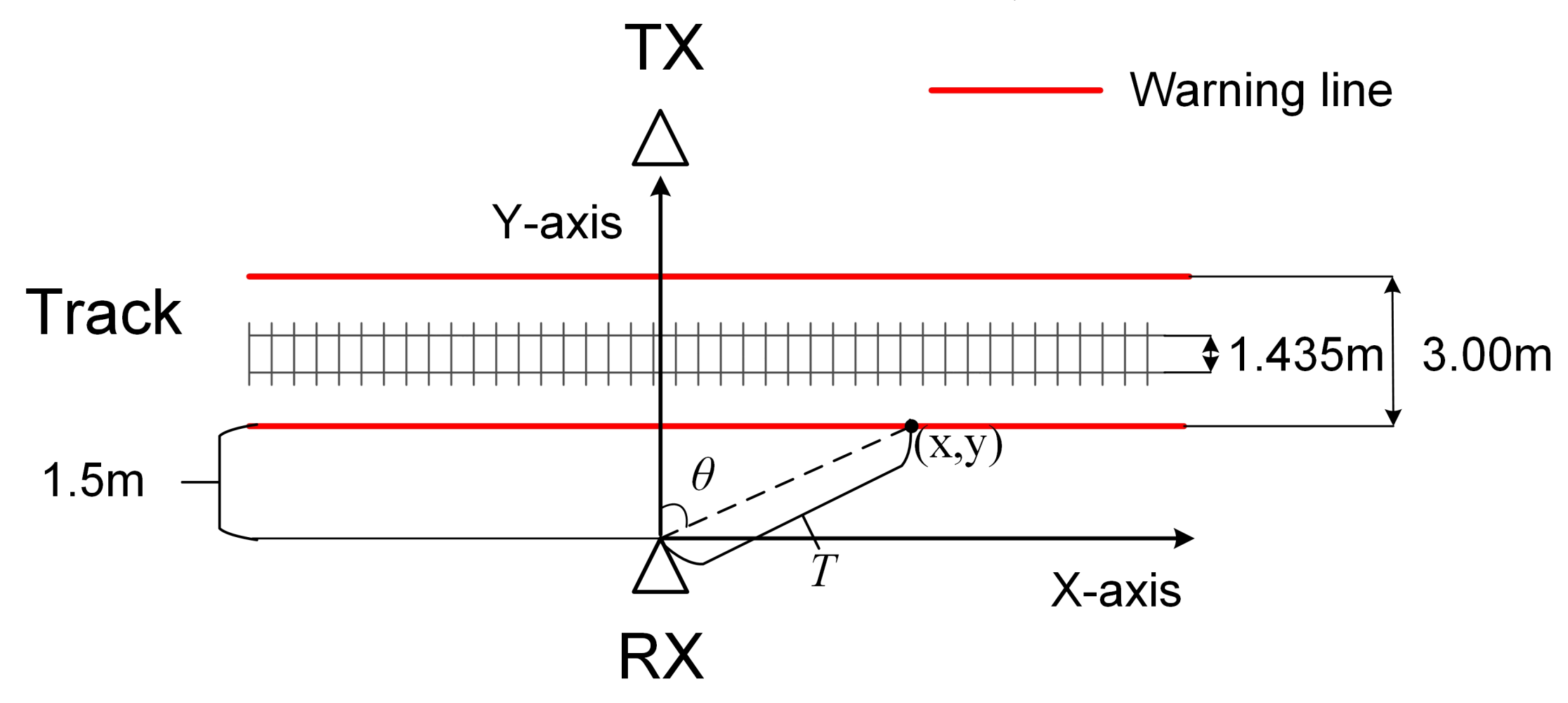
- Calculate foreign object coordinates. We use the signal receiving as the origin to establish the two-dimensional plane coordinate system where the angle of the foreign object repoint relative to the origin is , and the distance is . Thus, the coordinates of the foreign object will be uniquely determined, where the x-coordinate and the y-coordinate .
4.3. Static Clutter Suppression
| Algorithm 2 Foreign object detection and localization algorithm. |
| Input: matrix after phase calibration output by Algorithm 1 |
| Output: 1 Foreign object Intrusion Alarm |
| 2 Coordinates of the foreign object |
|
4.4. Train Recognition Based on RCS
5. Performance Evaluation
5.1. Visualization and Performance of Detecting Foreign Object
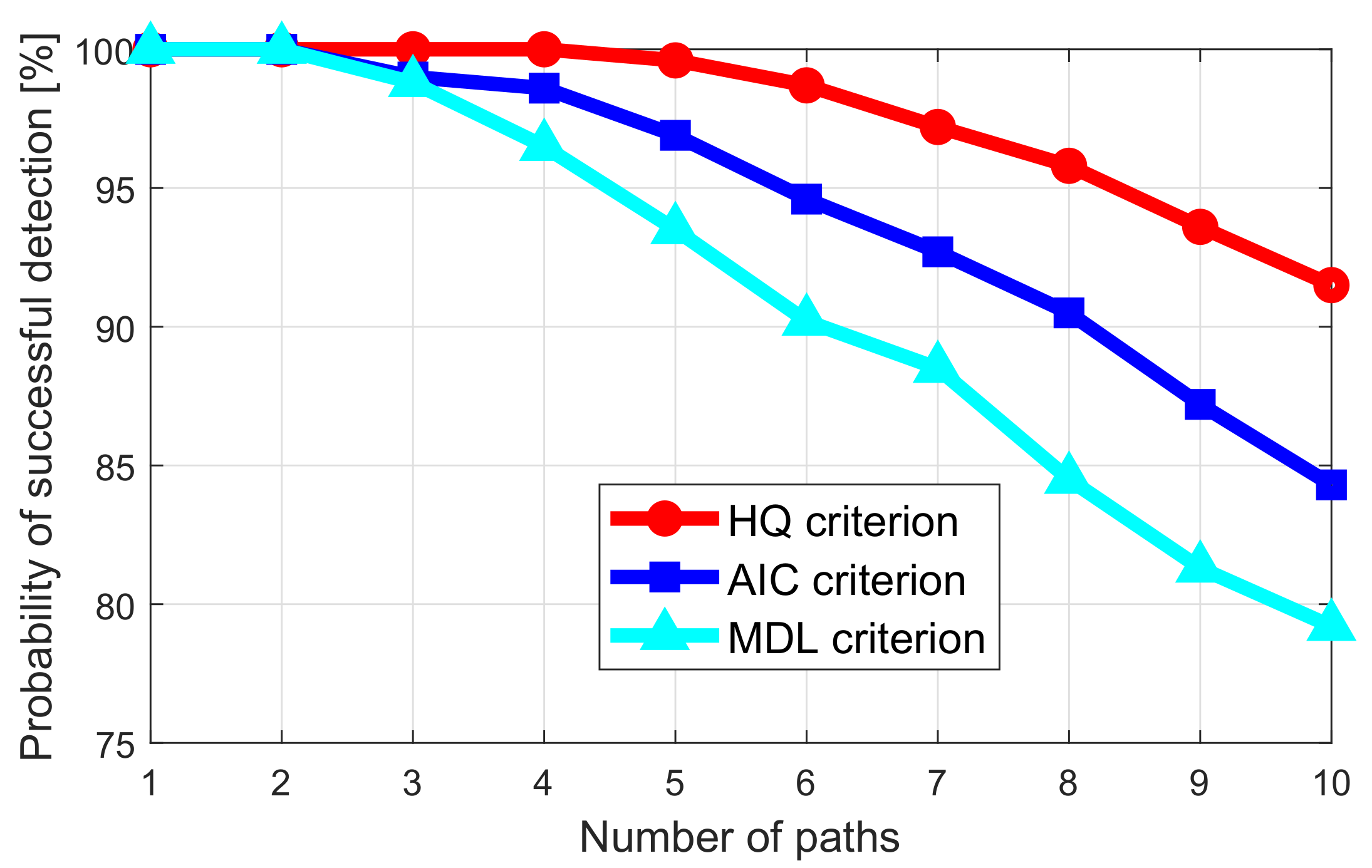
5.1.1. Comparison of Information Theory Criterion
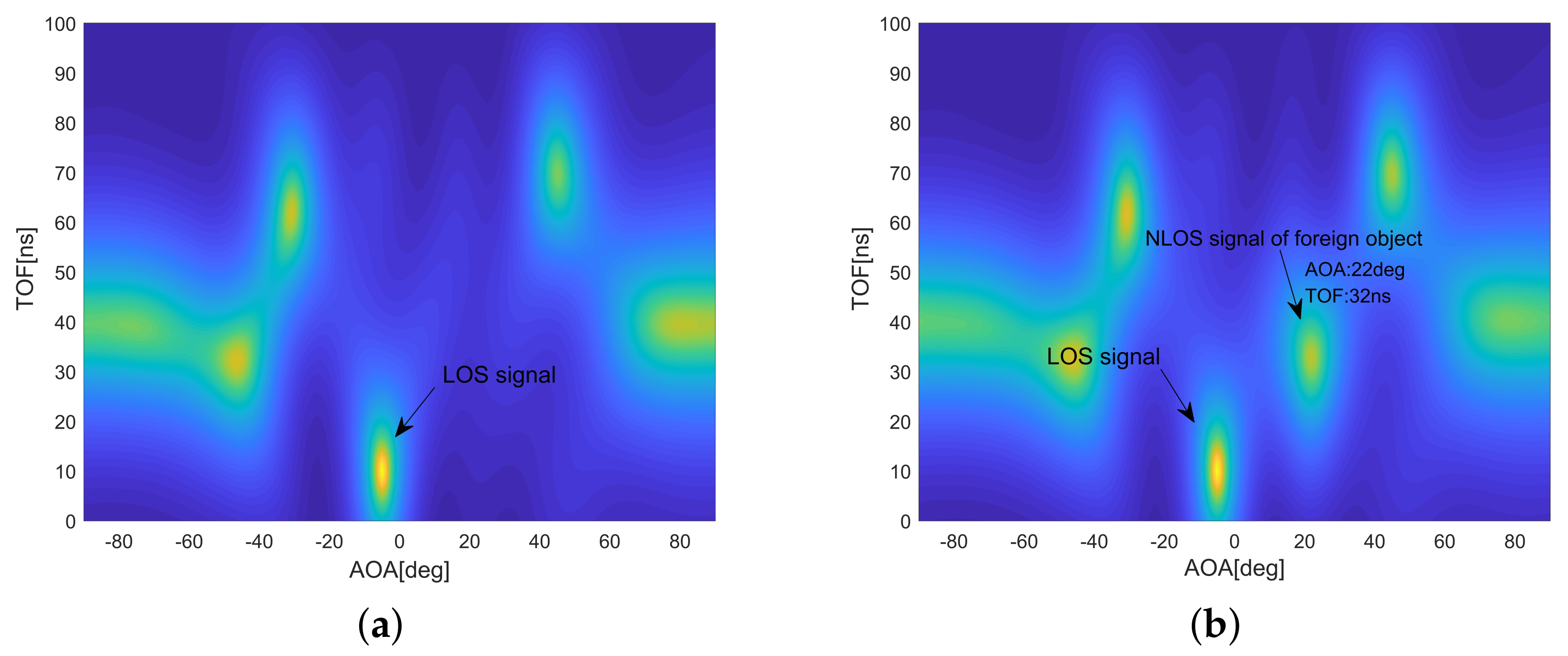
5.1.2. Visualization of Detecting a Foreign Object
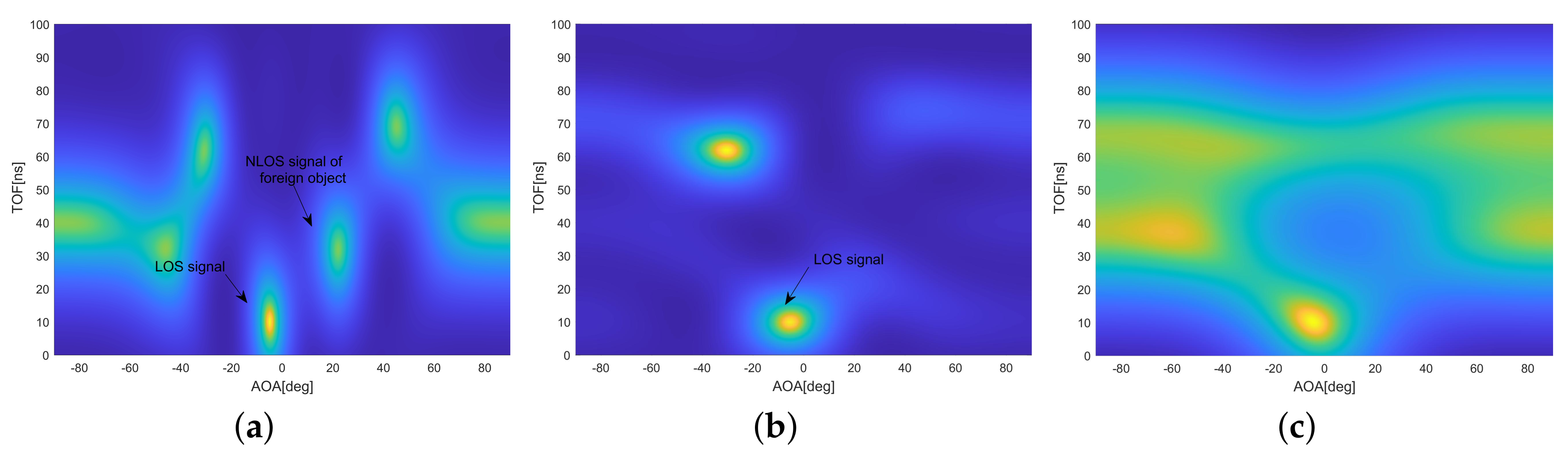
5.1.3. Impact of Spatial Smoothing and Phase Calibration on AOA Estimation
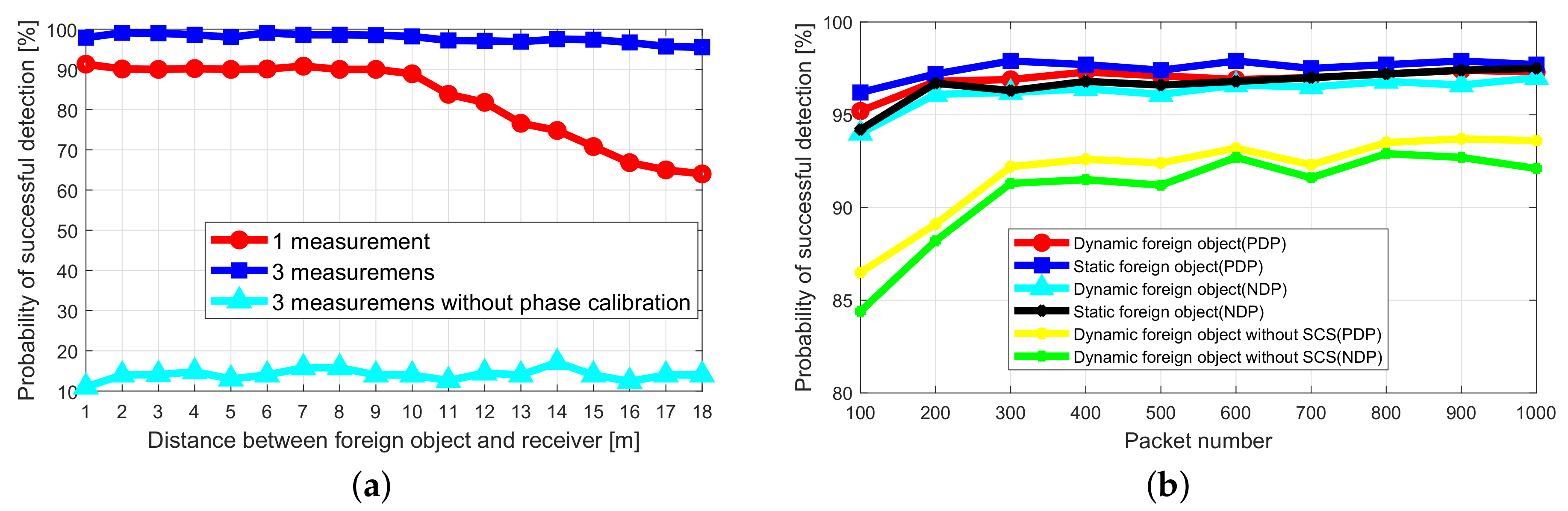
5.1.4. Impact of Distance to Receiver on Detection Probability
5.1.5. Impact of Packet Number on Detection Probability
5.2. Performance of Localizing Foreign Object
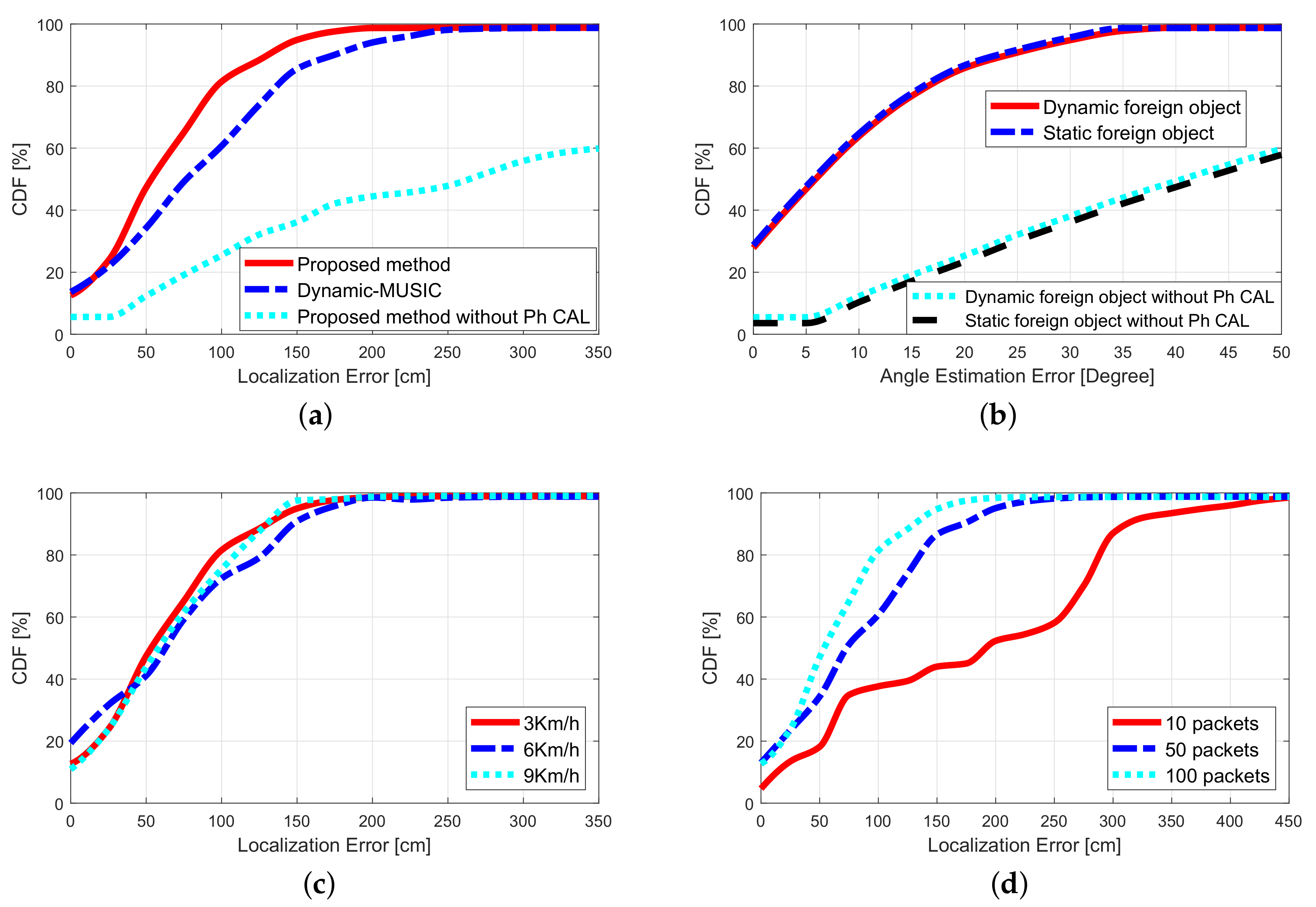
5.2.1. Comparison with Other Algorithms
5.2.2. Performance of Angle Estimation
5.2.3. Impact of Speed on Localization
5.2.4. Impact of Packet Number on Localization
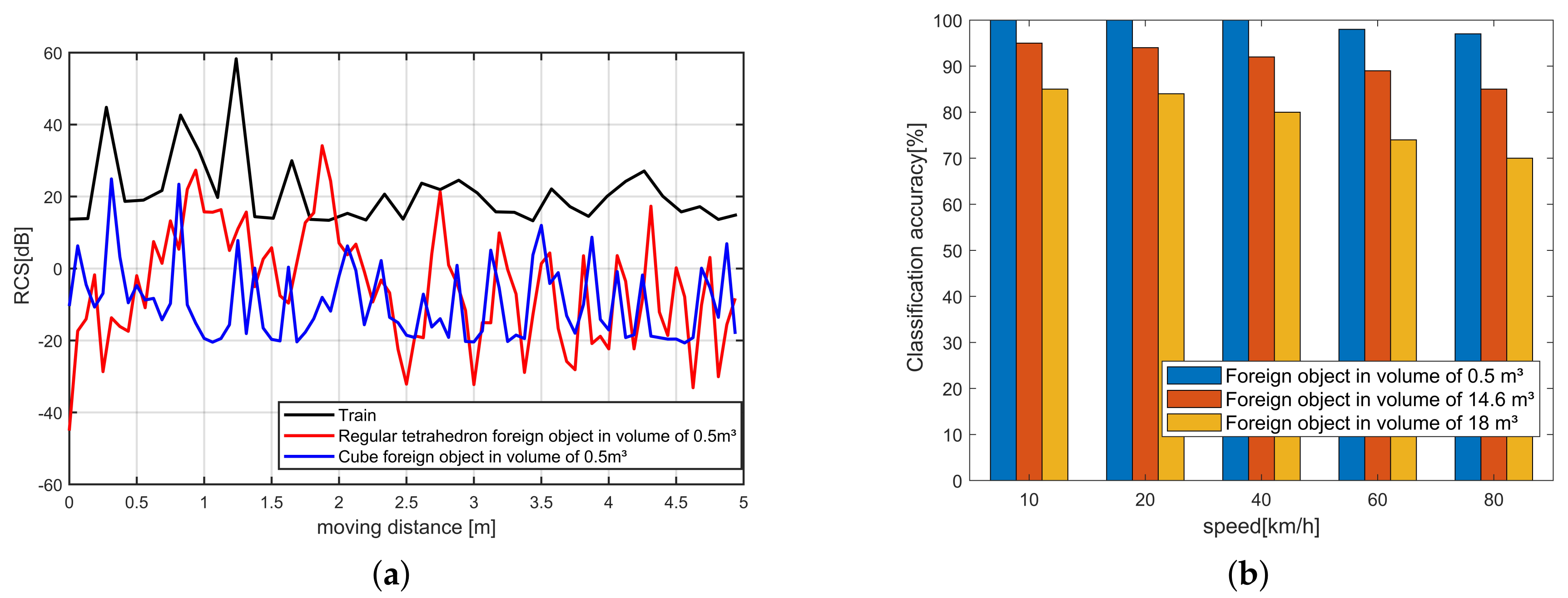
5.3. Simulation of Train Recognition
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Symbol | Description |
| the time delay of transceiver caused by clock unsynchronization | |
| the phase offset caused by clock unsynchronization | |
| the frequency spacing between two consecutive subcarriers | |
| n | the subcarrier index |
| d | the antenna distance of transceiver |
| the signal incident angle to reciever’s antennas | |
| f | the center frequency of subcarrier |
| c | the speed of light |
| m | the antenna index |
| i | the packet index |
| the phase of the nth subcarrier of the mth antenna in the ith packet | |
| the time delay of the ith packet | |
| the linear fit variable | |
| the linear fit variable | |
| M | the number of antennas in transmitter or receiver |
| N | the number of subcarriers |
| the time delay of best linear fit | |
| the sanitized phase of the nth subcarrier of the mth antenna in the ith packet | |
| L | the number of signal propagation paths |
| k | the index of signal propagation paths |
| the transmitting signal of Lth propagation paths | |
| the ideal steering matrix for transmitting signals | |
| the wavelength of transmitting signals | |
| the phase offset of the transmitted signal on the first antenna for kth path | |
| the transmitting signal of kth propagation paths | |
| the transmitting signal of nth subcarrier | |
| the phase difference between subcarriers in kth propagation paths | |
| the TOF between subcarriers in kth propagation paths | |
| the signal noise | |
| the steering matrix of the kth path | |
| the phase offset caused by the clock unsynchronization of intel 5300 WiFi NIC | |
| the phase offset matrix on the antenna array | |
| the real matrix | |
| the phase of mid antenna on subcarrier | |
| the performance evaluation parameter of the fast phase calibration | |
| the data size | |
| the execution time of the code | |
| the total execution times | |
| the matrix | |
| the covariance matrix of phase | |
| the signal subspace | |
| the noise subspace | |
| the generalized expression of the information theory criterion | |
| the log-likelihood function | |
| the penalty function | |
| l | the number of signal sources to be estimated |
| S | the number of samples |
| the likelihood function | |
| the spectrum for AOA and TOF | |
| the mean value of the spectrum for AOA and TOF | |
| the suppressed spectrum for AOA and TOF | |
| T | the times number of spectrum estimation |
| the amplitude attenuation of CSI from transmitter i to receiver j | |
| the propagation attenuation of CSI from transmitter i to receiver j | |
| the diffraction attenuation of CSI from transmitter i to receiver j | |
| the target absorption attenuation | |
| the angle of the foreign object to the receiver | |
| the distance from transmitter to the foreign object | |
| the distance from the foreign object to the receiver | |
| x | x coordinate of the foreign object |
| y | y coordinate of the foreign object |
| the number of times that there is a foreign object detected in all the detection times | |
| the number of times a foreign object actually exists in all the detection times | |
| the number of times that there is no foreign objects detected in all the detection times | |
| the number of times a foreign object actually doesn’t exist in all the detection times | |
| the receiver power input | |
| the transmitter power output | |
| the gain of the receiving antenna | |
| the gain of the transmitting antenna | |
| the distance from the transmitting antenna to the target | |
| the distance from the receiving antenna to the target | |
| the effective area of aperture of the receiving antenna |
Appendix A. Phase Sanitization Algorithm
Appendix B. Information Theory Criterion
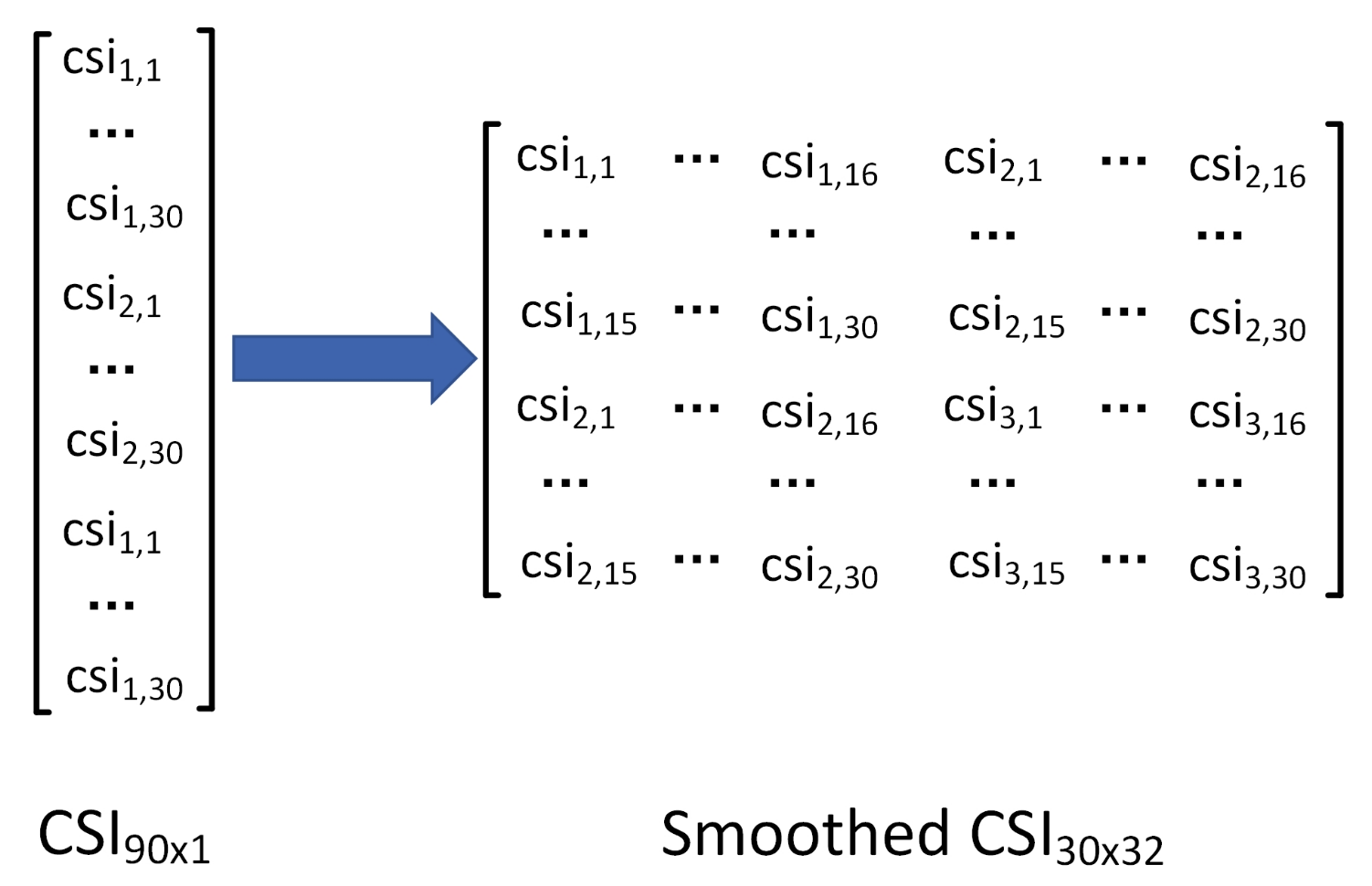
Appendix C. CSI Spatial Smoothing Matrix

References
- Li, H.; Zhang, X.; He, J.; Peng, J.; Huang, Z.; Wang, J. Cooperative CC-CV Charging of Supercapacitors Using Multi-Charger Systems. IEEE Trans. Ind. Electron. 2020, in press. [Google Scholar] [CrossRef]
- Claudio, S.; Carlo, S.R. A Distributed Surveillance System for Detection of Abandoned Objects in Unmanned Railway Environments. IEEE Trans. Veh. Technol. 2000, 49, 2013–2026. [Google Scholar]
- Hongmei, S.; Hua, C.; Yao, W.; Zujun, Y. Study on Railway Embedded Detection Algorithm for Railway Intrusion Based on Object Recognition and Tracking. J. China Railw. Soc. 2015, 37, 62–69. [Google Scholar]
- Seh, C.O.; Gil, D.K.; Woo, T.J.; Young, T.P. Vision-based Object Detection for Passenger’s Safety in Railway Platform. In Proceedings of the IEEE 2008 International Conference on Control, Automation and Systems (ICCAS), Seoul, Korea, 14–17 October 2008; pp. 2134–2137. [Google Scholar]
- Chenming, L.; Wenguang, W. Detection and Tracking of Moving Targets for Thermal Infrared Video Sequences. Sensors 2018, 18, 3944. [Google Scholar]
- Dan, Y.; Bin, X.; Kaiyou, R.; Weihua, S. Passive Infrared (PIR)-Based Indoor Position Tracking for Smart Homes Using Accessibility Maps and A-Star Algorithm. Sensors 2018, 18, 332. [Google Scholar]
- Akbar, M.B.; Taylor, D.G.; Durgin, G.D. Hybrid Inertial Microwave Reflectometry for mm-Scale Tracking in RFID. IEEE Trans. Wirel. Commun. 2015, 14, 6805–6814. [Google Scholar] [CrossRef]
- Yifan, W.; Konstanty, S.B.; Albertus, J.P.; Abraham, G.W.d.P.; Amin, M.A. In-Road Microwave Sensor for Electronic Vehicle Identification and Tracking: Link Budget Analysis and Antenna Prototype. IEEE Trans. Intell. Transp. Syst. 2018, 19, 123–128. [Google Scholar]
- Dan, Y.; Bin, X.; Kaiyou, R.; Weihua, S. Portable Microwave Radar Systems for Short-Range Localization and Life Tracking: A Review. Sensors 2019, 19, 1136. [Google Scholar]
- Daniel, H.; Wenjun, H.; Anmol, S.; David, W. Tool release: Gathering 802.11n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar]
- Daniel, H.; Wenjun, H.; Anmol, S.; David, W. 802.11 with Multiple Antennas for Dummies. ACM SIGCOMM Comput. Commun. Rev. 2010, 40, 19–25. [Google Scholar]
- Rubayet, S.; Lingjia, L.; Jianzhong, Z.; Yik-Chung, W. DoA Estimation and Capacity Analysis for 3-D Millimeter Wave Massive-MIMO/FD-MIMO OFDM Systems. IEEE Trans. Wirel. Commun. 2016, 15, 6963–6978. [Google Scholar]
- Shuai, H.; Yi, L.; Weixiao, M.; Cheng, L.; Tianqi, L.; Yanbo, Z. Indoor Localization With a Single Wi-Fi Access Point Based on OFDM-MIMO. IEEE Syst. J. 2019, 13, 964–972. [Google Scholar]
- Lee, H.; Ahn, C.; Choi, N.; Kim, T.; Lee, H. The Effects of Housing Environments on the Performance of Activity-Recognition Systems Using Wi-Fi Channel State Information: An Exploratory Study. Sensors 2019, 19, 983. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, S.; Liu, Z.; Zhang, Y.; Niu, X.; Wang, L.; Zhang, D. A real-time and robust intrusion detection system with commodity wi-fi. In Proceedings of the 2019 International Symposium on Wearable Computers (ISWC 2019), London, UK, 11–13 September 2019; pp. 316–319. [Google Scholar]
- Ma, L.; Liu, M.; Wang, H.; Zhang, Y.; Chen, Y. High accurate localisation using multipath effects via physical layer information. Int. J. Inf. Commun. Technol. 2019, 15, 15. [Google Scholar] [CrossRef]
- Xu, J. On the Safety of Train/Ground WiFi Communic-ation for Urban Rail Transit. Urban Mass Transit. 2016, 19, 86–89. [Google Scholar]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter Level Localization Using WiFi. ACM SIGCOMM Comput. Commun. Rev. 2015, 45, 269–282. [Google Scholar] [CrossRef]
- Xiong, J.; Jamieson, K.; Sundaresan, K. Synchronicity: Pushing the envelope of fine-grained localization with distributed MIMO. In Proceedings of the 1st ACM Workshop on Hot Topics in Wireless, Maui, HI, USA, 7–11 September 2014; pp. 43–48. [Google Scholar]
- Shangguan, L.; Li, Z.; Yang, Z.; Li, M.; Liu, Y.; Han, J. OTrack: Towards Order Tracking for Tags in Mobile RFID Systems. In Proceedings of the 1st ACM Workshop on Hot Topics in Wireless, Maui, HI, USA, 7–11 September 2014; pp. 2114–2125. [Google Scholar]
- Al-qaness, M.A.A.; Li, F.; Ma, X.; Liu, G. Device-Free Home Intruder Detection and Alarm System Using Wi-Fi Channel State Information. Int. J. Future Comput. Commun. 2016, 5, 180–186. [Google Scholar] [CrossRef] [Green Version]
- Heba, A.; Reham, S.; Ibrahim, S.; Moustafa, Y. MonoPHY: Mono-stream-based device-free WLAN localization via physical layer information. In Proceedings of the 2013 IEEE 33rd International Conference on Distributed Computing Systems (ICDCS 2013), Philadelphia, PA, USA, 8–11 July 2013; pp. 4546–4551. [Google Scholar]
- Jiang, X.; Kaishun, W.; Youwen, Y.; Lu, W.; Lionel, M.N. Pilot: Passive Device-Free Indoor Localization Using Channel State Information. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 236–245. [Google Scholar]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Device-free Human Activity Recognition Using Commercial WiFi Devices. IEEE J. Sel. Areas Commun. 2017, 35, 1118–1131. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, H.; Xiong, J.; Jamieson, K.; Chen, X.; Fang, D.; Xie, B.M. LiFS: Low Human-Effort, Device-Free Localization with Fine-Grained Subcarrier Information. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking, New York, NY, USA, 3–7 October 2016; pp. 243–256. [Google Scholar]
- Xie, J.; Li, S.; Ma, Y.F. Object Instrusion Detection on Railway Track Using Commodity Wireless Network. In Proceedings of the 38th Chinese Control Conference (CCC2019), Guangzhou, China, 27–30 July 2019. [Google Scholar]
- Gjengset, J.; Xiong, J.; Mcphillips, G.; Jamieson, K. Phaser: Enabling phased array signal processing on commodity WiFi access points. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 153–164. [Google Scholar]
- Dongheng, Z.; Yang, H.; Yan, C.; Bing, Z. Calibrating Phase Offsets for Commodity WiFi. IEEE Syst. J. 2019, 14, 661–664. [Google Scholar]
- Rogers, J.W.M.; Dai, F.F.; Cavin, M.S. A multiband ΔΣ fractional-N frequency synthesizer for a MIMO WLAN transceiver RFIC. IEEE J. Solid State Circuits 2005, 40, 678–689. [Google Scholar] [CrossRef]
- Wax, M.; Kailath, T. Detection of signals by information theoretic criteria. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 387–392. [Google Scholar] [CrossRef] [Green Version]
- Wax, M.; Ziskind, I. Detection of the number of coherent signals by the MDL principle. IEEE Trans. Mob. Comput. 1989, 37, 1190–1196. [Google Scholar] [CrossRef]
- Runcong, M.; GwoJong, Y.; Guilin, C.; Shenghui, Z.; Bin, Y. Hierarchical CSI-fingerprints Classification for Passive Multi-person Localization. In Proceedings of the 2017 International Conference on Networking and Network Applications (NaNA 2017), Kathmandu City, Nepal, 16–19 October 2017; pp. 112–117. [Google Scholar]
- Adamsky, F.; Retunskaia, T.; Schiffner, S.; Köbel, C.; Engel, T. WLAN Device Fingerprinting using Channel State Information (CSI). In Proceedings of the 11th ACM Conference on Security and Privacy in Wireless and Mobile Networks, Stockholm, Sweden, 18–20 June 2018; pp. 277–278. [Google Scholar]
- Xiang, L.; Shengjie, L.; Daqing, Z.; Jie, X.; Yasha, W.; Hong, M. Dynamic-MUSIC: Accurate device-free indoor localization. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp 2016), Heidelberg, Germany, 12–16 September 2016; pp. 196–207. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (Mid Antenna) | ||
|---|---|---|
| Experimental Facilities | Parameters | Value |
|---|---|---|
| Rail | width (m) | 1.435 |
| height (m) | 0.176 | |
| Transceiver | NIC | Intel 5300 |
| distance (m) | 4.5 | |
| angle () | 0 | |
| frequency (GHz) | 5 | |
| distance between antennas (cm) | 2.6 | |
| number of OFDM carrier | 30 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Xie, J.; Zhou, F.; Liu, W.; Li, H. Foreign Object Intrusion Detection on Metro Track Using Commodity WiFi Devices with the Fast Phase Calibration Algorithm. Sensors 2020, 20, 3446. https://doi.org/10.3390/s20123446
Li S, Xie J, Zhou F, Liu W, Li H. Foreign Object Intrusion Detection on Metro Track Using Commodity WiFi Devices with the Fast Phase Calibration Algorithm. Sensors. 2020; 20(12):3446. https://doi.org/10.3390/s20123446
Chicago/Turabian StyleLi, Shuo, Jin Xie, Feng Zhou, Weirong Liu, and Heng Li. 2020. "Foreign Object Intrusion Detection on Metro Track Using Commodity WiFi Devices with the Fast Phase Calibration Algorithm" Sensors 20, no. 12: 3446. https://doi.org/10.3390/s20123446
APA StyleLi, S., Xie, J., Zhou, F., Liu, W., & Li, H. (2020). Foreign Object Intrusion Detection on Metro Track Using Commodity WiFi Devices with the Fast Phase Calibration Algorithm. Sensors, 20(12), 3446. https://doi.org/10.3390/s20123446