A Deep-Learning Model for Underwater Position Sensing of a Wake’s Source Using Artificial Seal Whiskers


Abstract
:1. Introduction
Objective
2. Materials and Methods
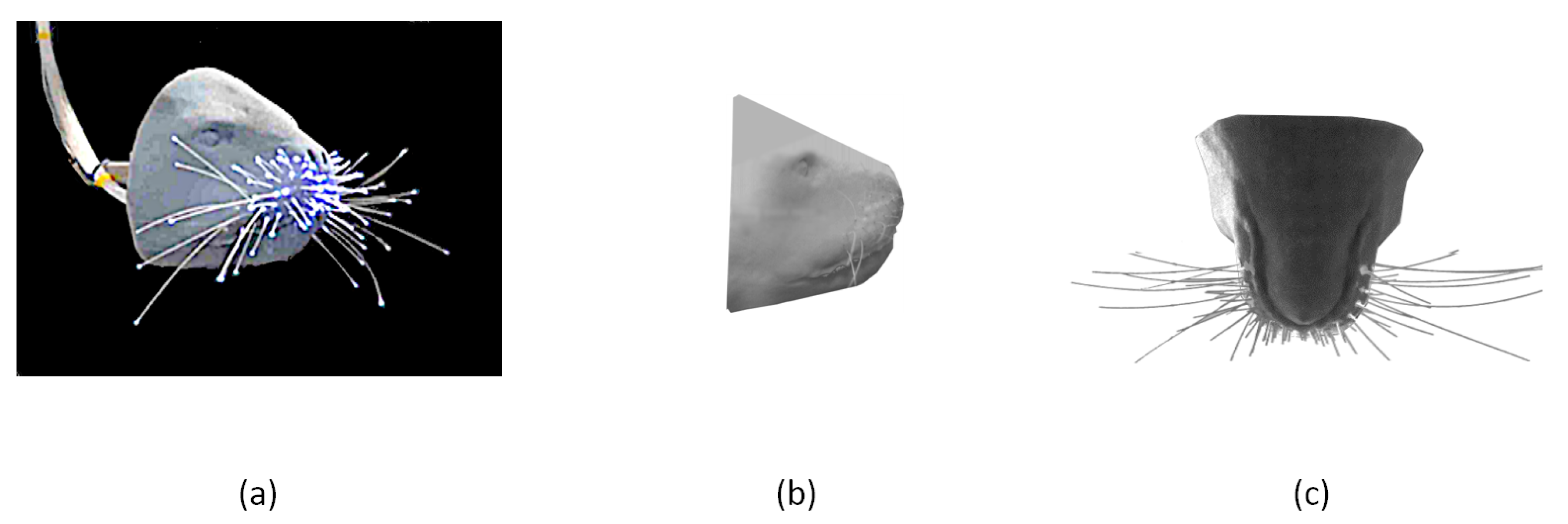
2.1. Physical Model
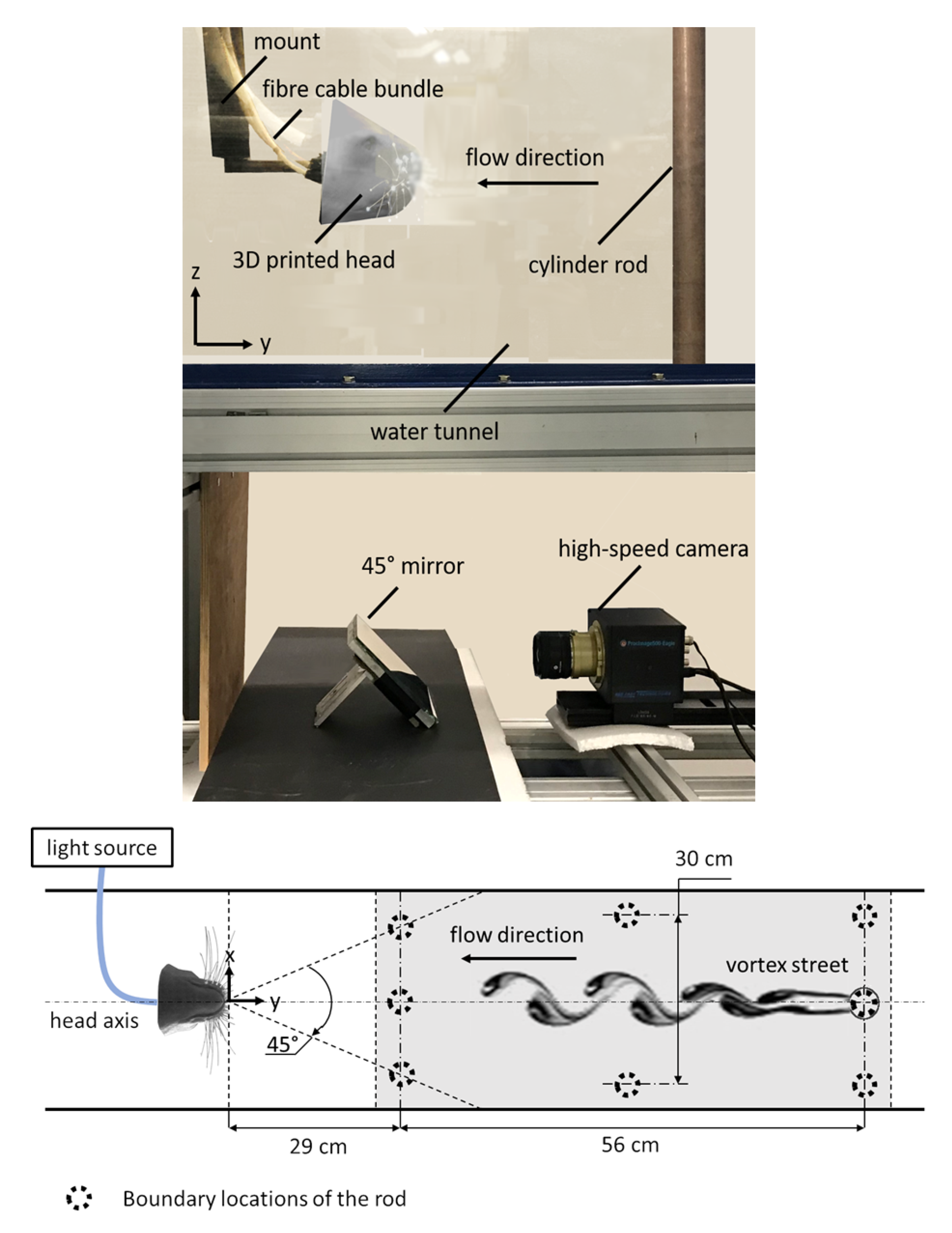
2.2. Experiment
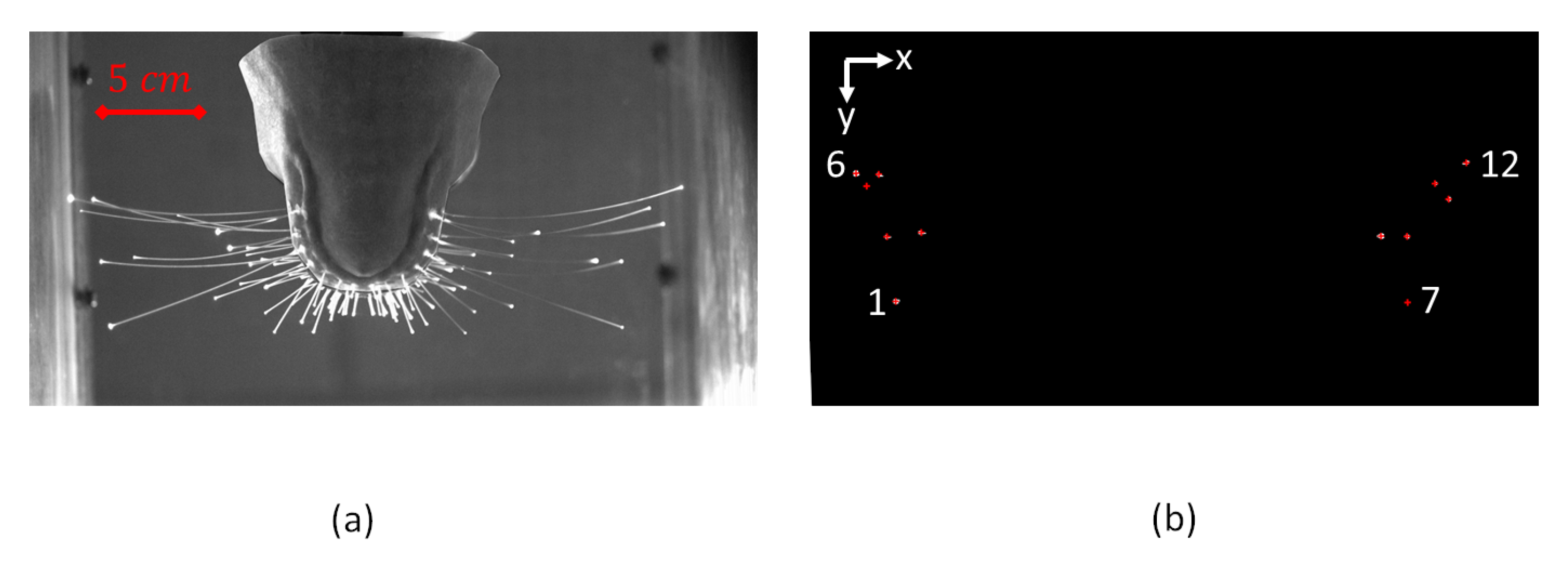
2.3. Data Acquisition
2.4. Data Processing and Feature Extraction
2.5. Supervised Leaning Models
- the optimization parameters of the Marquardt–Levenberg Algorithm (MLA) are initialized, as follows: (refer to Appendix B for a brief description of the MLA);
- preliminary values of the two parameters are used, such that the hidden-layer size is set to for both models;
- the network training algorithm is performed (as illustrated above) and the overall model accuracy is estimated after the 10-fold cross-validation;
- the hidden-layer size is then updated by increasing the number of neurons per layer and/or the number of hidden layers and then jumping back to step 3 to restart the training of the networks;
- after several loops of the above sequence, the hidden-layer size associated with the highest prediction accuracy is selected: [] for the x-coordinate prediction model and [] for the y-coordinate prediction model.
3. Results
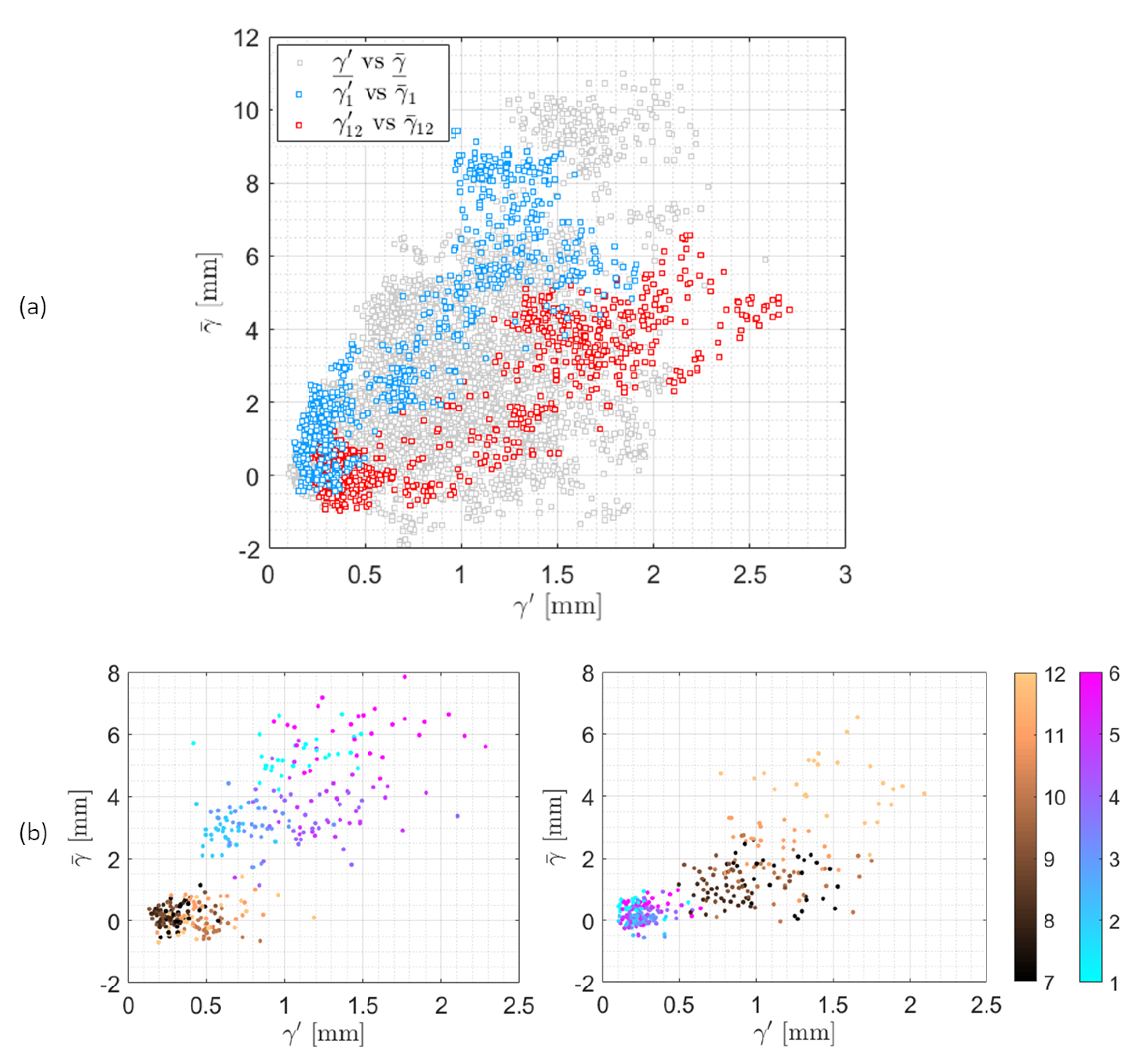
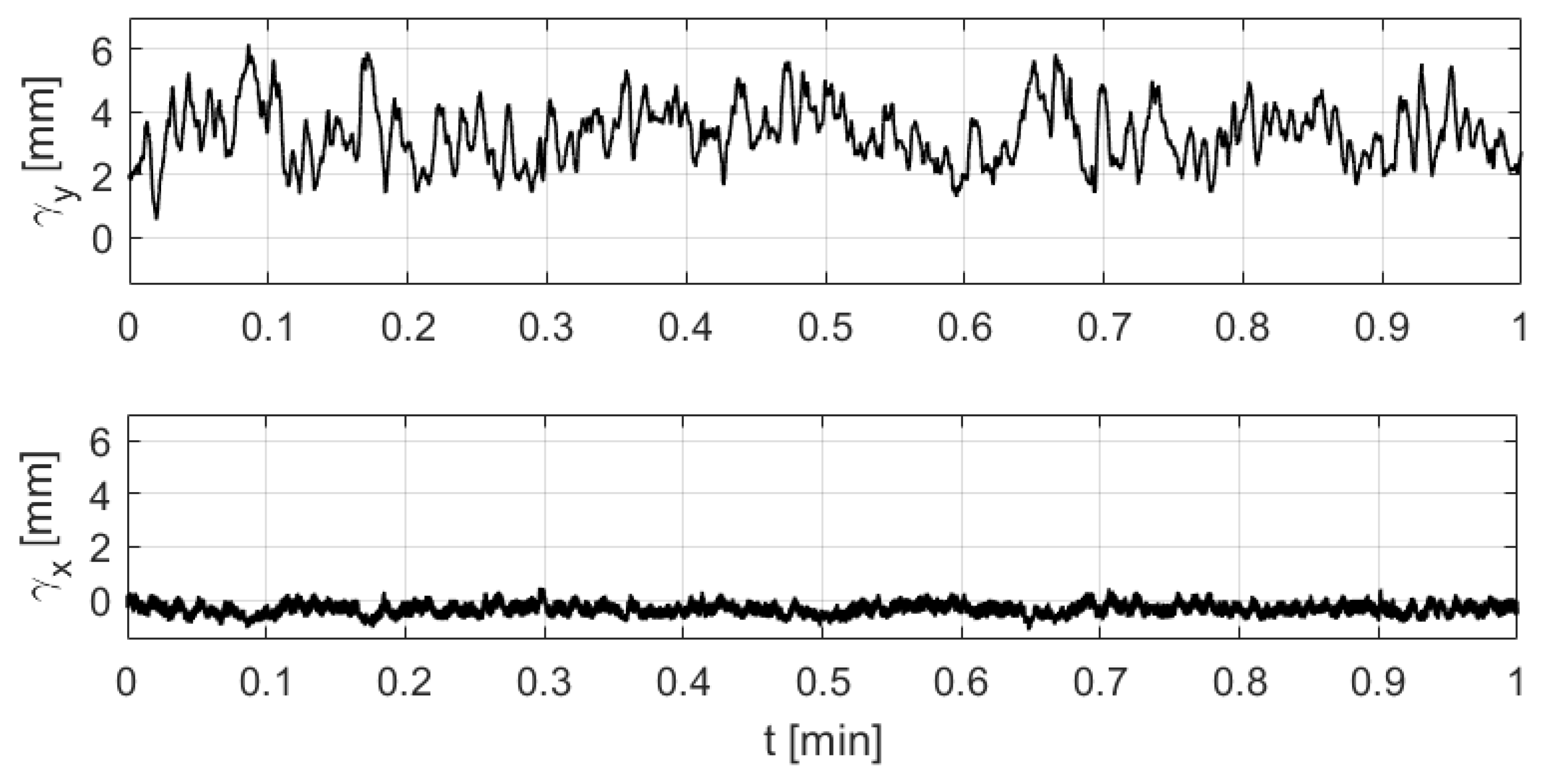
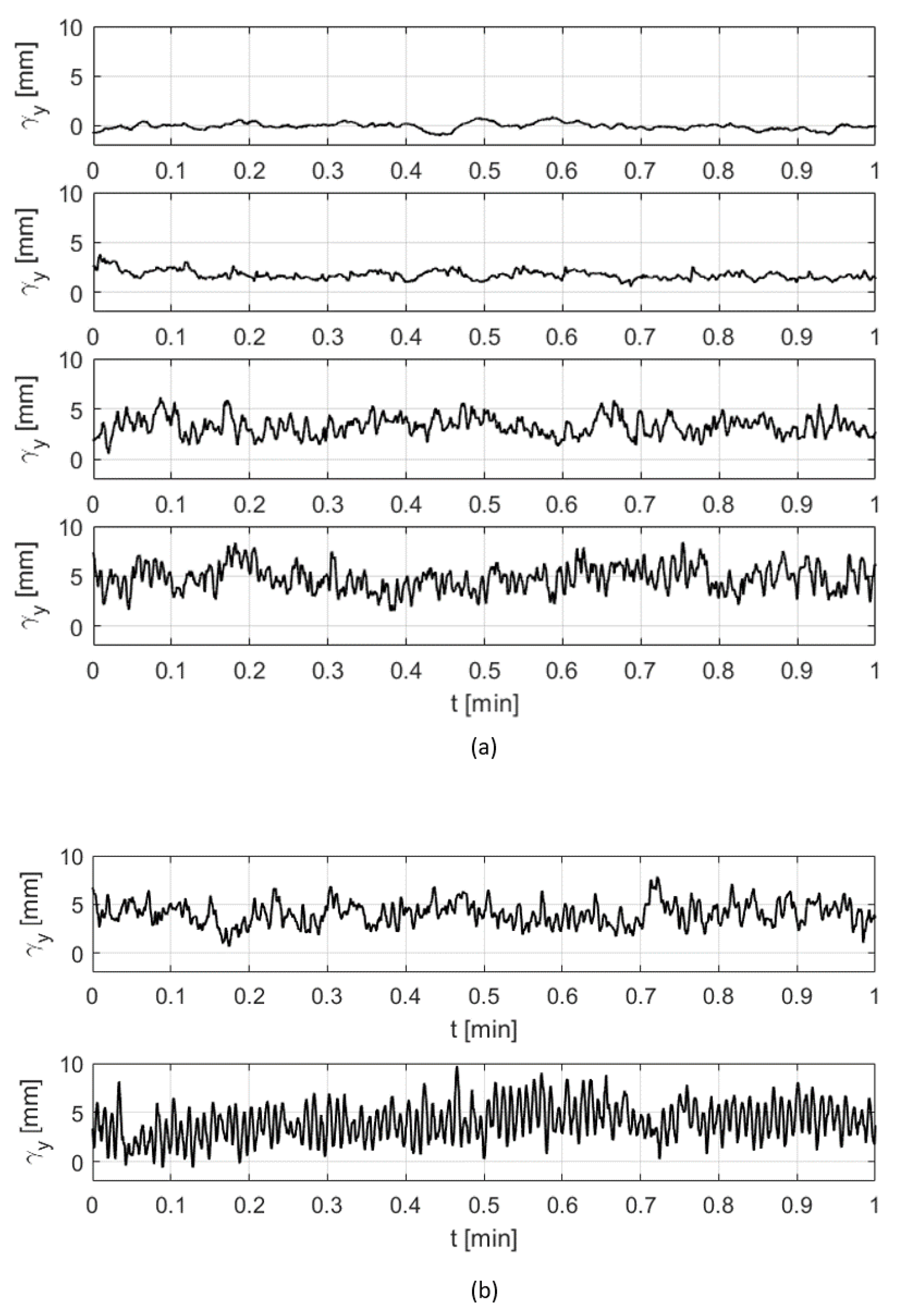
3.1. Wake-Induced Bending of the Whiskers
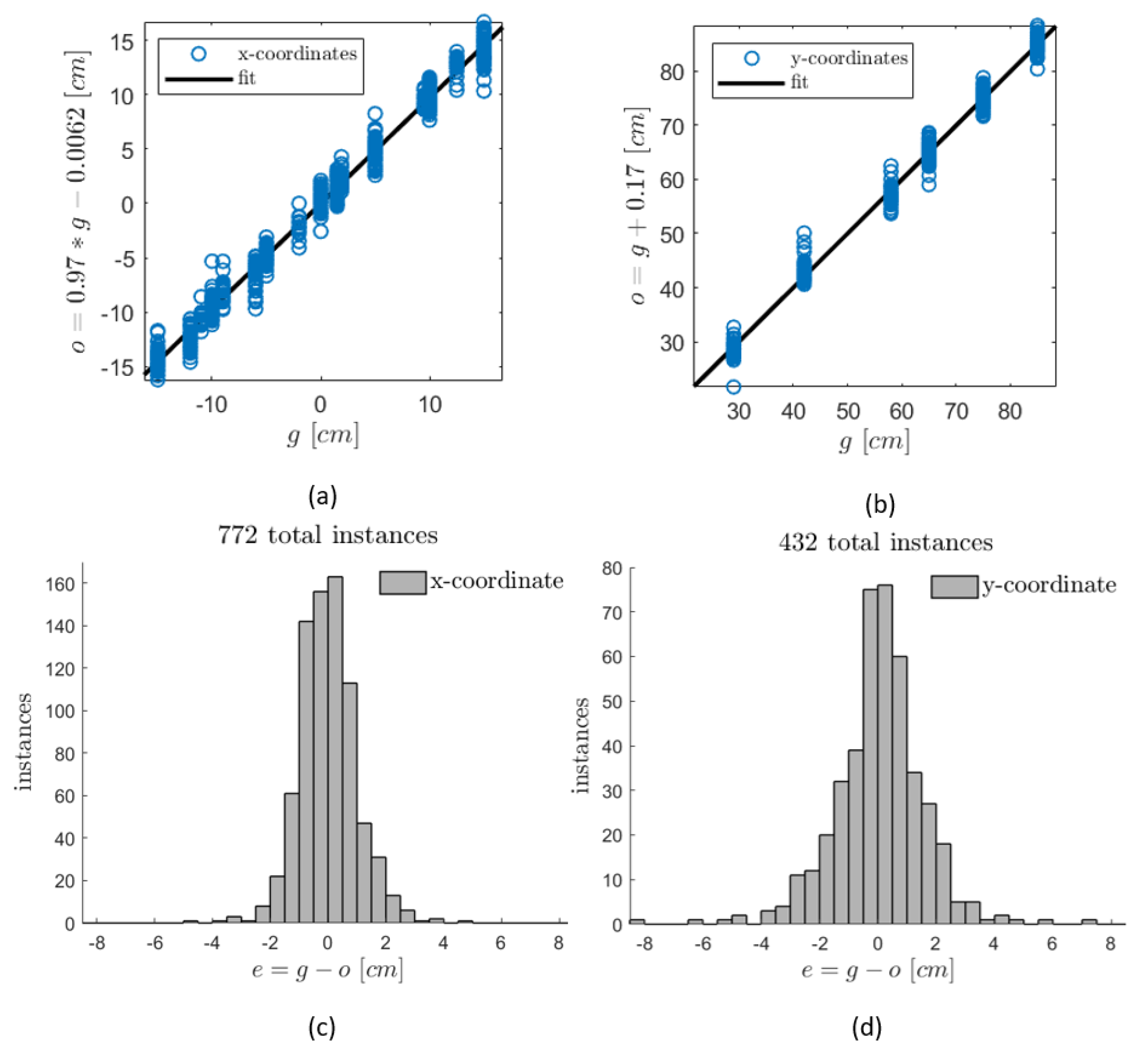
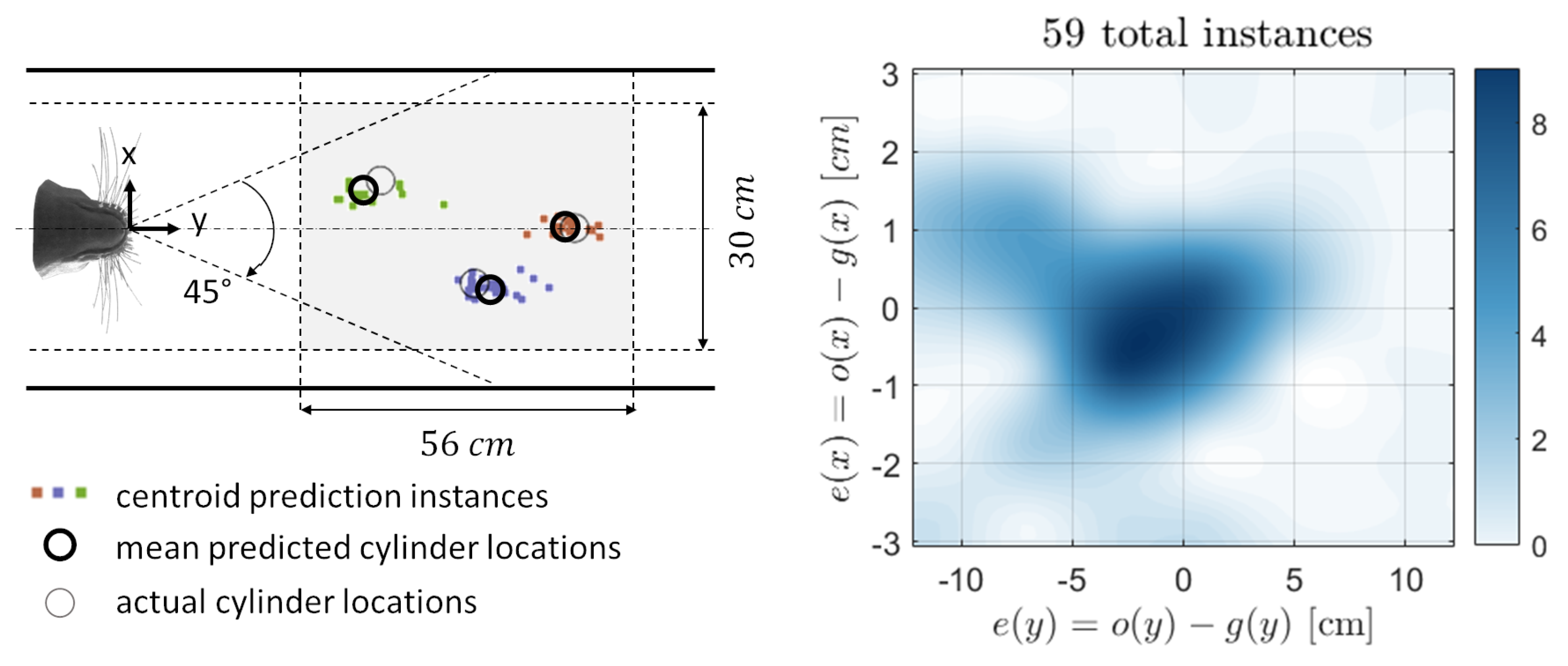
3.2. Prediction Outcomes of the Learning Models
3.3. Sensitivity of the Predictions to the Size of the Training Dataset
3.4. Sensitivity of the Predictions to the Number of Whisker-Pairs Included in the Training
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
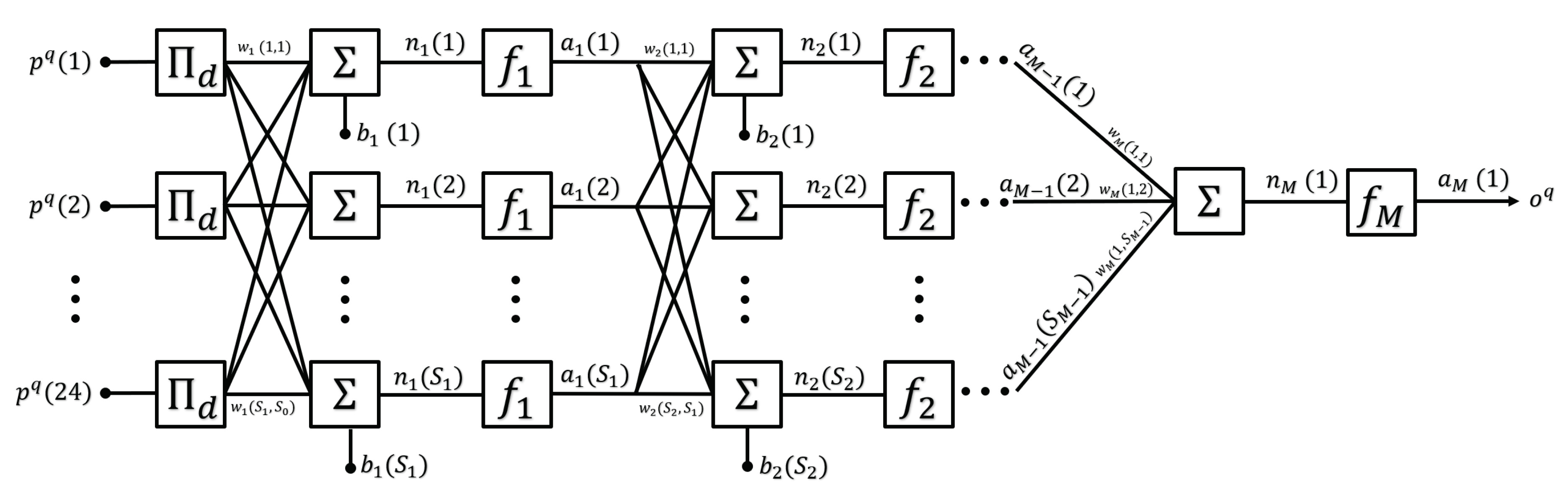
Appendix A. Structures of the Neural-Network Models

Appendix B. Learning Algorithm
References
- Underwater Robotics Market Size, Share & Trends Analysis Report by Type, 2018 to 2025, Grand View Research. Available online: https://www.grandviewresearch.com/industry-analysis/underwater-robotics-market (accessed on 15 February 2020).
- Leonard, J.J.; Bennett, A.A.; Smith, C.M.; Jacob, H.; Feder, S. Autonomous Underwater Vehicle Navigation. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.86.1769&rep=rep1&type=pdf (accessed on 15 February 2020).
- Griffiths, G. Technology and Applications of Autonomous Underwater Vehicles; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Kinsey, J.C.; Eustice, R.M.; Whitcomb, L.L. A survey of underwater vehicle navigation: Recent advances and new challenges. In Proceedings of the IFAC Conference of Manoeuvering and Control of Marine Craft, Lisbon, Portugal, 20–22 September 2006; Volume 88, pp. 1–12. [Google Scholar]
- Kröger, R. The physics of light in air and water. In Sensory Evolution on the Threshold—Adaptations in Secondarily Aquatic Vertebrates; University of California Press: Berkeley, CA, USA, 2008; pp. 113–119. [Google Scholar]
- Lee, D.; Kim, G.; Kim, D.; Myung, H.; Choi, H.T. Vision-based object detection and tracking for autonomous navigation of underwater robots. Ocean Eng. 2012, 48, 59–68. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, J.; Engel, J.; Pandya, S.; Chen, N.; Tucker, C.; Coombs, S.; Jones, D.L.; Liu, C. Distant touch hydrodynamic imaging with an artificial lateral line. Proc. Natl. Acad. Sci. USA 2006, 103, 18891–18895. [Google Scholar] [CrossRef] [Green Version]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Schrope, M. Whale deaths caused by US Navy’s sonar. Nature 2002, 415, 106. [Google Scholar] [CrossRef] [Green Version]
- Windsor, S.P.; Tan, D.; Montgomery, J.C. Swimming kinematics and hydrodynamic imaging in the blind Mexican cave fish (Astyanax fasciatus). J. Exp. Biol. 2008, 211, 2950–2959. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Von Campenhausen, C.; Riess, I.; Weissert, R. Detection of stationary objects by the blind Cave Fish Anoptichthys jordani (Characidae). J. Comp. Physiol. 1981, 143, 369–374. [Google Scholar] [CrossRef]
- Montgomery, J.C.; Coombs, S.; Baker, C.F. The mechanosensory lateral line system of the hypogean form of Astyanax fasciatus. In The Biology of Hypogean Fishes; Springer: Dordrecht, The Netherlands, 2001; pp. 87–96. [Google Scholar]
- Hanke, W.; Brücker, C.; Bleckmann, H. The ageing of the low-frequency water disturbances caused by swimming goldfish and its possible relevance to prey detection. J. Exp. Biol. 2000, 203, 1193–1200. [Google Scholar] [PubMed]
- Hanke, W.; Bleckmann, H. The hydrodynamic trails of Lepomis gibbosus (Centrarchidae), Colomesus psittacus (Tetraodontidae) and Thysochromis ansorgii (Cichlidae) investigated with scanning particle image velocimetry. J. Exp. Biol. 2004, 207, 1585–1596. [Google Scholar] [CrossRef] [Green Version]
- Dehnhardt, G.; Mauck, B.; Hanke, W.; Bleckmann, H. Hydrodynamic trail-following in harbor seals (Phoca vitulina). Science 2001, 293, 102–104. [Google Scholar] [CrossRef] [PubMed]
- Müller, R.; Kuc, R. Biosonar-inspired technology: Goals, challenges and insights. BioInspir. Biomim. 2007, 2, S146. [Google Scholar] [CrossRef] [Green Version]
- Dehnhardt, G.; Mauck, B.; Bleckmann, H. Seal whiskers detect water movements. Nature 1998, 394, 235–236. [Google Scholar] [CrossRef]
- Wieskotten, S.; Mauck, B.; Miersch, L.; Dehnhardt, G.; Hanke, W. Hydrodynamic discrimination of wakes caused by objects of different size or shape in a harbour seal (Phoca vitulina). J. Exp. Biol. 2011, 214, 1922–1930. [Google Scholar] [CrossRef] [Green Version]
- Ju, F.; Ling, S.F. Bioinspired active whisker sensor for robotic vibrissal tactile sensing. Smart Mater. Struct. 2014, 23, 125003. [Google Scholar] [CrossRef]
- Tao, J.; Yu, X.B. Hair flow sensors: From bio-inspiration to bio-mimicking—A review. Smart Mater. Struct. 2012, 21, 113001. [Google Scholar] [CrossRef]
- Dijkstra, M.; Van Baar, J.; Wiegerink, R.J.; Lammerink, T.S.; De Boer, J.; Krijnen, G.J. Artificial sensory hairs based on the flow sensitive receptor hairs of crickets. J. Micromech. Microeng. 2005, 15, S132. [Google Scholar] [CrossRef]
- Kottapalli, A.G.P.; Asadnia, M.; Miao, J.; Triantafyllou, M.S. Biomimetic Microsensors Inspired by Marine Life; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Kottapalli, A.G.; Asadnia, M.; Miao, J.; Barbastathis, G.; Triantafyllou, M.S. A flexible liquid crystal polymer MEMS pressure sensor array for fish-like underwater sensing. Smart Mater. Struct. 2012, 21, 115030. [Google Scholar] [CrossRef] [Green Version]
- Eberhardt, W.C.; Wakefield, B.F.; Murphy, C.T.; Casey, C.; Shakhsheer, Y.; Calhoun, B.H.; Reichmuth, C. Development of an artificial sensor for hydrodynamic detection inspired by a seal’s whisker array. BioInspir. Biomim. 2016, 11, 056011. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krüger, Y.; Hanke, W.; Miersch, L.; Dehnhardt, G. Detection and direction discrimination of single vortex rings by harbour seals (Phoca vitulina). J. Exp. Biol. 2018, 221, jeb170753. [Google Scholar] [CrossRef] [Green Version]
- Wieskotten, S.; Dehnhardt, G.; Mauck, B.; Miersch, L.; Hanke, W. Hydrodynamic determination of the moving direction of an artificial fin by a harbour seal (Phoca vitulina). J. Exp. Biol. 2010, 213, 2194–2200. [Google Scholar] [CrossRef] [Green Version]
- Wieskotten, S.; Dehnhardt, G.; Mauck, B.; Miersch, L.; Hanke, W. The impact of glide phases on the trackability of hydrodynamic trails in harbour seals (Phoca vitulina). J. Exp. Biol. 2010, 213, 3734–3740. [Google Scholar] [CrossRef] [Green Version]
- Muthuramalingam, M.; Bruecker, C. Seal and Sea lion Whiskers Detect Slips of Vortices Similar as Rats Sense Textures. Sci. Rep. 2019, 9, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.S.; Zhao, Z.Y.; Zhuo, Z.C.; Zheng, W.; Qian, Y.; Zhang, Y.S. Bend sensor using an embedded etched fiber Bragg grating. Microw. Opt. Technol. Lett. 2004, 43, 414–417. [Google Scholar] [CrossRef]
- Grattan, L.; Meggitt, B. Optical Fiber Sensor Technology: Advanced Applications-Bragg Gratings and Distributed Sensors; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Zhuang, C.; Kubilius, J.; Hartmann, M.J.; Yamins, D.L. Toward goal-driven neural network models for the rodent whisker-trigeminal system. In Advances in Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2017; pp. 2555–2565. [Google Scholar]
- Pearson, M.J.; Mitchinson, B.; Sullivan, J.C.; Pipe, A.G.; Prescott, T.J. Biomimetic vibrissal sensing for robots. Philos. Trans. Royal Soc. B: Biol. Sci. 2011, 366, 3085–3096. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lepora, N.F. Biomimetic active touch with fingertips and whiskers. IEEE Trans. Haptics 2016, 9, 170–183. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, D.; Möller, R. Biomimetic whiskers for shape recognition. Robot. Auton. Syst. 2007, 55, 229–243. [Google Scholar] [CrossRef]
- Delamare, J.; Sanders, R.; Krijnen, G. 3D printed biomimetic whisker-based sensor with co-planar capacitive sensing. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–2 November 2016; pp. 1–3. [Google Scholar]
- Hanke, W.; Witte, M.; Miersch, L.; Brede, M.; Oeffner, J.; Michael, M.; Hanke, F.; Leder, A.; Dehnhardt, G. Harbor seal vibrissa morphology suppresses vortex-induced vibrations. J. Exp. Biol. 2010, 213, 2665–2672. [Google Scholar] [CrossRef] [Green Version]
- Beem, H.R.; Triantafyllou, M.S. Wake-induced ‘slaloming’ response explains exquisite sensitivity of seal whisker-like sensors. J. Fluid Mech. 2015, 783, 306–322. [Google Scholar] [CrossRef] [Green Version]
- y Alvarado, P.V.; Subramaniam, V.; Triantafyllou, M. Design of a bio-inspired whisker sensor for underwater applications. In Proceedings of the 2012 IEEE SENSORS, Taipei, Taiwan, 28–31 October 2012; pp. 1–4. [Google Scholar]
- Summarell, C.C.G.; Ingole, S.; Fish, F.E.; Marshall, C.D. Comparative analysis of the flexural stiffness of pinniped vibrissae. PLOS ONE 2015, 10, e0127941. [Google Scholar]
- Sawyer, E.K.; Turner, E.C.; Kaas, J.H. Somatosensory brainstem, thalamus, and cortex of the California sea lion (Zalophus californianus). J. Comp. Neurol. 2016, 524, 1957–1975. [Google Scholar] [CrossRef] [Green Version]
- Leal-Junior, A.; Frizera, A.; Marques, C.; Pontes, M.J. Mechanical properties characterization of polymethyl methacrylate polymer optical fibers after thermal and chemical treatments. Opt. Fiber Technol. 2018, 43, 106–111. [Google Scholar] [CrossRef]
- Subramaniam, V.; y Alvarado, P.V.; Weymouth, G. Sensing on robots inspired by nature. In Biomimetic Microsensors Inspired by Marine Life; Springer: Cham, Switzerland, 2017; pp. 77–110. [Google Scholar]
- Williamson, C.H. Vortex dynamics in the cylinder wake. Annu. Rev. Fluid Mech. 1996, 28, 477–539. [Google Scholar] [CrossRef]
- Dietterich, T. Overfitting and undercomputing in machine learning. ACM Comput. Surv. (CSUR) 1995, 27, 326–327. [Google Scholar] [CrossRef]
- Lawrence, S.; Giles, C.L.; Tsoi, A.C. Lessons in neural network training: Overfitting may be harder than expected. In Proceedings of the Fourteenth National Conference on Artificial Intelligence, AAAI-97, Providence, RI, USA, 27–28 July 1997; pp. 540–545. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer Science & Business Media: New York, NY, USA, 2009. [Google Scholar]
- Efficient 2D Histogram, No Toolboxes Needed, MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/45325-efficient-2d-histogram-no-toolboxes-needed (accessed on 2 March 2020).
- Waibel, A.; Hanazawa, T.; Hinton, G.; Shikano, K.; Lang, K.J. Phoneme recognition using time-delay neural networks. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 328–339. [Google Scholar] [CrossRef]
- Xie, J.X.; Cheng, C.; Chau, K.W.; Pei, Y.Z. A hybrid adaptive time-delay neural network model for multi-step-ahead prediction of sunspot activity. Int. J. Environ. Pollut. 2006, 28, 364–381. [Google Scholar] [CrossRef] [Green Version]
- Juang, J.G.; Chang, H.H. Application of time delay neural network to automatic landing control. In Proceedings of the International Conference on Control Applications, Glasgow, Scotland, UK, 18–20 September 2002; Volume 1, pp. 150–155. [Google Scholar]
- Anderson, J.A. An Introduction to Neural Networks; The MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Rosenbloom, P. The method of steepest descent. Proc. Symp. Appl. Math 1956, 6, 127–176. [Google Scholar]
- Hagan, M.T.; Menhaj, M.B. Training feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Size of Training Set of x-Model [Samples] | Mean for Predictions of x | Size of Training Set of y-Model [Samples] | Mean for Predictions of y |
|---|---|---|---|
| 772 | 0.9868 | 432 | 0.9615 |
| 708 | 0.9795 | 400 | 0.9231 |
| 644 | 0.9845 | 368 | 0.9332 |
| 580 | 0.9757 | 336 | 0.8681 |
| 516 | 0.9734 | 304 | 0.8517 |
| 452 | 0.9659 | 272 | 0.8099 |
| 388 | 0.9789 | 240 | 0.7223 |
| 324 | 0.9718 | 208 | 0.6166 |
| 260 | 0.9429 | 176 | 0.7367 |
| 196 | 0.9459 | 144 | 0.6472 |
| Number of Whisker Pairs in the Training Set | Mean for Predictions of x | Mean for Predictions of y |
|---|---|---|
| 6 | 0.9868 | 0.9615 |
| 5 | 0.964 | 0.8843 |
| 4 | 0.9851 | 0.8686 |
| 3 | 0.9738 | 0.763 |
| 2 | 0.9512 | 0.8447 |
| 1 (front pair) | 0.9536 | 0.6604 |
| 6 | 0.9868 | 0.9615 |
| 5 | 0.98 | 0.9120 |
| 4 | 0.978 | 0.8766 |
| 3 | 0.9781 | 0.6595 |
| 2 | 0.9583 | 0.5928 |
| 1 (rear pair) | 0.9532 | 0.3305 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elshalakani, M.; Muthuramalingam, M.; Bruecker, C. A Deep-Learning Model for Underwater Position Sensing of a Wake’s Source Using Artificial Seal Whiskers. Sensors 2020, 20, 3522. https://doi.org/10.3390/s20123522
Elshalakani M, Muthuramalingam M, Bruecker C. A Deep-Learning Model for Underwater Position Sensing of a Wake’s Source Using Artificial Seal Whiskers. Sensors. 2020; 20(12):3522. https://doi.org/10.3390/s20123522
Chicago/Turabian StyleElshalakani, Mohamed, Muthukumar Muthuramalingam, and Christoph Bruecker. 2020. "A Deep-Learning Model for Underwater Position Sensing of a Wake’s Source Using Artificial Seal Whiskers" Sensors 20, no. 12: 3522. https://doi.org/10.3390/s20123522
APA StyleElshalakani, M., Muthuramalingam, M., & Bruecker, C. (2020). A Deep-Learning Model for Underwater Position Sensing of a Wake’s Source Using Artificial Seal Whiskers. Sensors, 20(12), 3522. https://doi.org/10.3390/s20123522