Robust Parking Path Planning with Error-Adaptive Sampling under Perception Uncertainty



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Overview
3. Parking Space Sampling
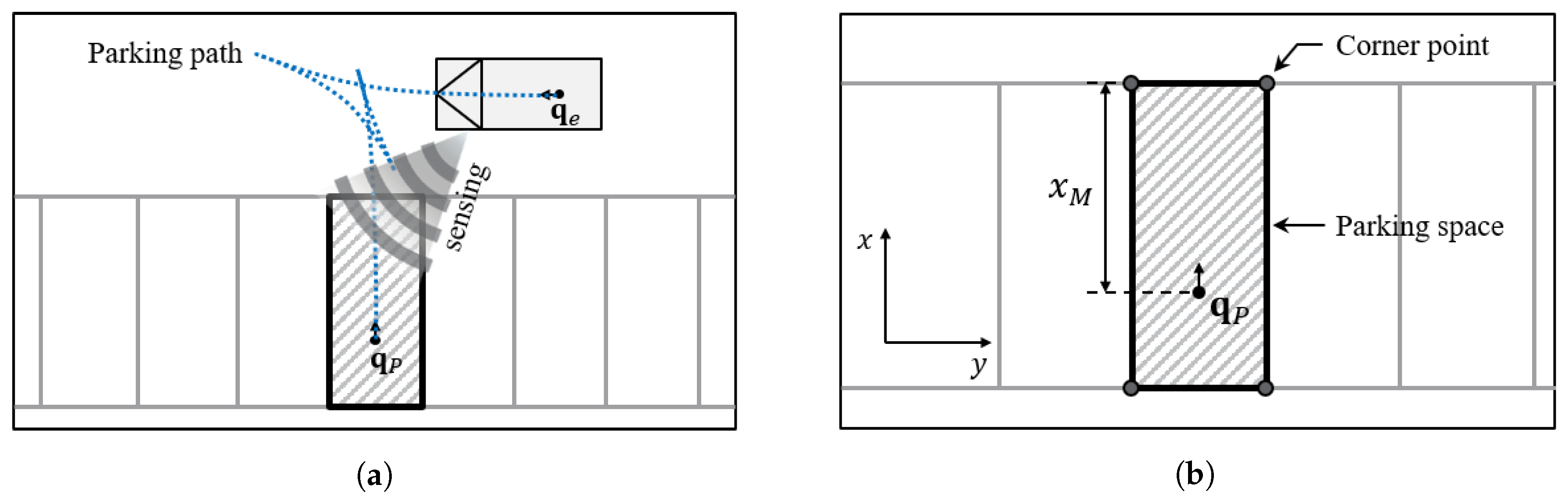
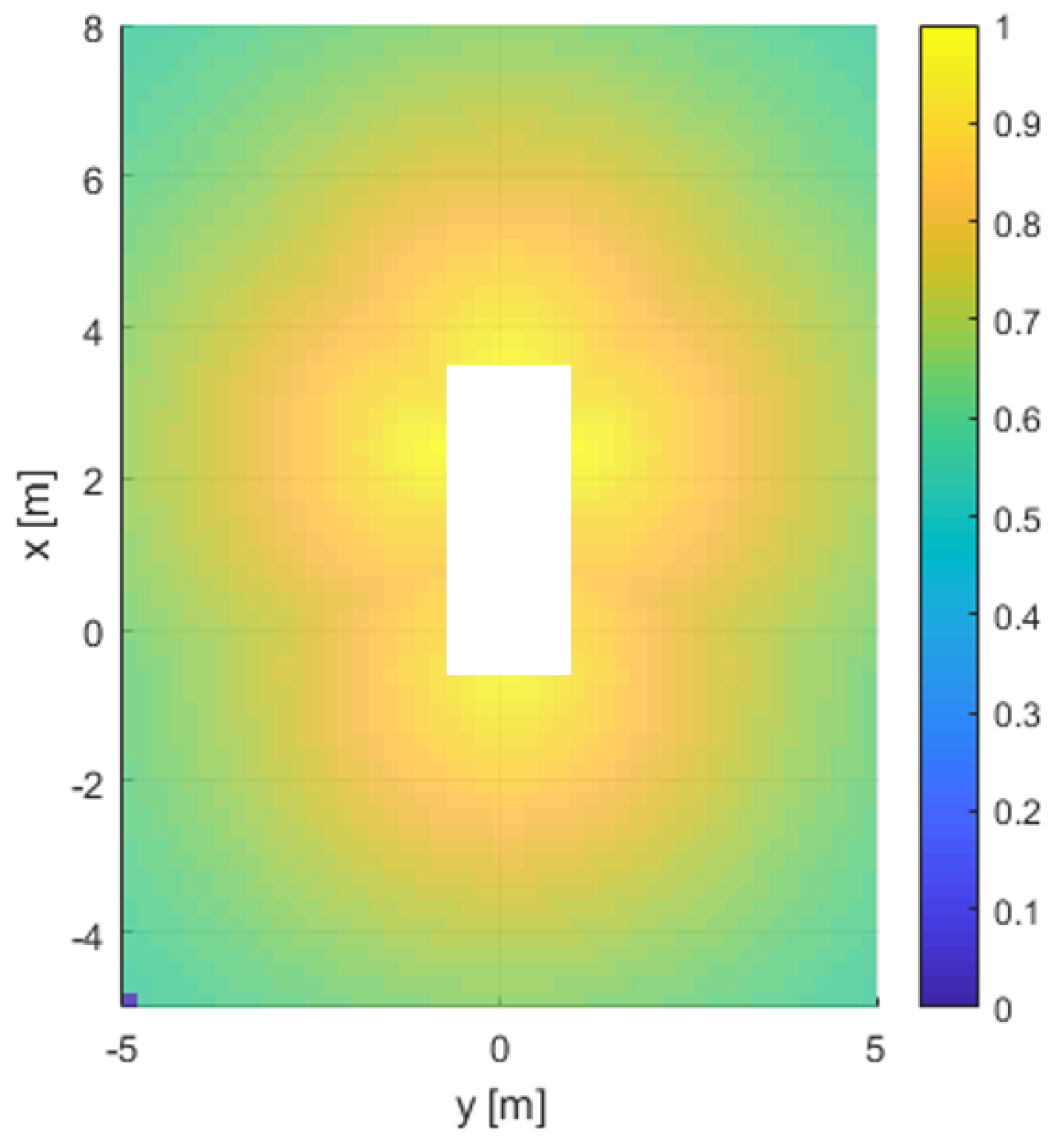
3.1. Perceptional Error Model
3.2. Error-Adaptive Sampling
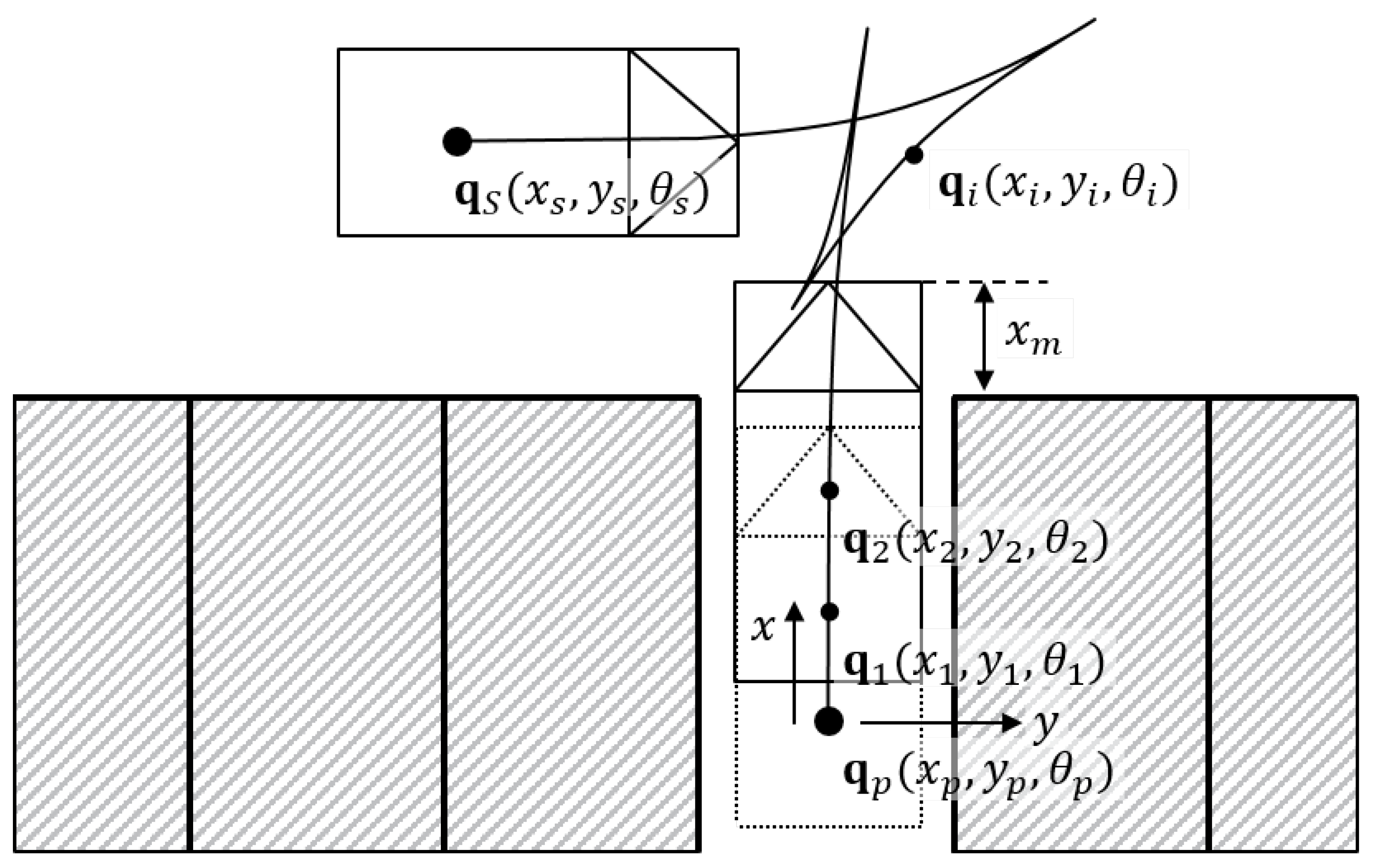
4. Path Candidate Generation
4.1. Vehicle Kinematic Model
4.2. Parking Path Planning
4.3. Direction Switching Point
4.4. Obstacles
5. Optimal Path Selection
5.1. Utility-Based Decision
5.1.1. Ideal Utility Function
5.1.2. Realistic Utility Function
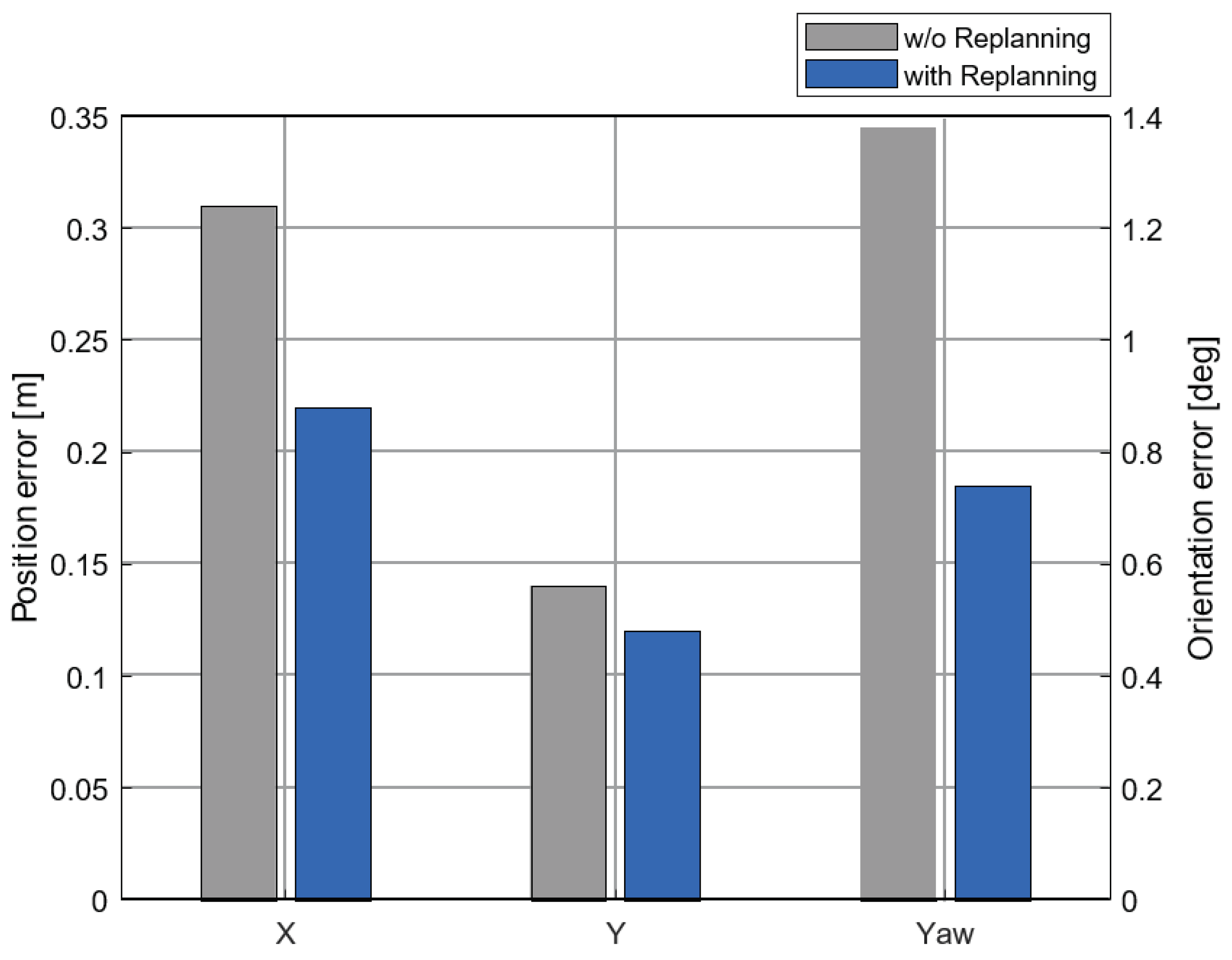
5.2. Re-Planning Strategy
6. Experimental Results
6.1. Scenario 1: Open Scenario
6.2. Scenario 2: Occupied Scenario
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Lee, S.; Hyeon, D.; Park, G.; Baek, I.J.; Kim, S.W.; Seo, S.W. Directional-DBSCAN: Parking-slot detection using a clustering method in around-view monitoring system. IEEE Intell. Veh. Symp. Proc. 2016, 457, 349–354. [Google Scholar] [CrossRef]
- Tseng, D.C.; Chao, T.W.; Chang, J.W. Image-based parking guiding using Ackermann steering geometry. Appl. Mech. Mater. 2013, 437, 823–826. [Google Scholar] [CrossRef]
- Hamada, K.; Hu, Z.; Fan, M.; Chen, H. Surround view based parking lot detection and tracking. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 1106–1111. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. Automatic Parking Space Detection and Tracking for Underground and Indoor Environments. IEEE Trans. Ind. Electron. 2016, 63, 5687–5698. [Google Scholar] [CrossRef]
- Park, W.J.; Kim, B.S.; Seo, D.E.; Kim, D.S.; Lee, K.H. Parking space detection using ultrasonic sensor in parking assistance system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 1039–1044. [Google Scholar] [CrossRef]
- Kianpisheh, A.; Mustaffa, N.; Limtrairut, P.; Keikhosrokiani, P. Smart Parking System (SPS) architecture using ultrasonic detector. Int. J. Softw. Eng. Appl. 2012, 6, 55–58. [Google Scholar]
- Jeong, S.H.; Choi, C.G.; Oh, J.N.; Yoon, P.J.; Kim, B.S.; Kim, M.; Lee, K.H. Low cost design of parallel parking assist system based on an ultrasonic sensor. Int. J. Automot. Technol. 2010, 11, 409–416. [Google Scholar] [CrossRef]
- Satonaka, H.; Okuda, M.; Hayasaka, S.; Endo, T.; Tanaka, Y.; Yoshida, T. Development of parking space detection using an ultrasonic sensor. In Proceedings of the 13th World Congress, London, UK, 8–12 October 2006; pp. 1–8. [Google Scholar]
- Hsieh, M.F.; Özguner, Ü. A parking algorithm for an autonomous vehicle. In Proceedings of the IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 1155–1160. [Google Scholar] [CrossRef]
- Lim, W.; Kim, J.; Jo, K.; Jo, Y.; Sunwoo, M. Turning Standard Line (TSL) Based Path Planning Algorithm for Narrow Parking Lots. SAE Tech. Pap. 2015, 1, 298. [Google Scholar]
- Jolly, K.G.; Sreerama Kumar, R.; Vijayakumar, R. A Bezier curve based path planning in a multi-agent robot soccer system without violating the acceleration limits. Rob. Autom. Syst. 2009, 57, 23–33. [Google Scholar] [CrossRef]
- Yoon, J.; Crane, C.D. Path planning for unmanned ground vehicle in urban parking area. In Proceedings of the 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011; pp. 887–892. [Google Scholar]
- Han, L.; Do, Q.H. Unified path planner for parking an autonomous vehicle based on RRT. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5622–5627. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Rob. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Sakaeta, K.; Oda, T.; Nonaka, K.; Sekiguchi, K. Model predictive parking control with on-line path generations and multiple switching motions. In Proceedings of the IEEE Conference on Control Applications (CCA), Sydney, Australia, 21–23 September 2015; pp. 804–809. [Google Scholar] [CrossRef]
- Li, B.; Shao, Z. A unified motion planning method for parking an autonomous vehicle in the presence of irregularly placed obstacles. Knowl. Based Syst. 2015, 86, 11–20. [Google Scholar] [CrossRef] [Green Version]
- Kobayashi, T.; Majima, S. Real-time optimization control for parking a vehicle automatically. In Proceedings of the IEEE International Vehicle Electronics Conference, Tottori, Japan, 25–28 September 2001; pp. 97–102. [Google Scholar] [CrossRef]
- Zips, P.; Böck, M.; Kugi, A. Optimisation based path planning for car parking in narrow environments. Rob. Autom. Syst. 2016, 79, 1–11. [Google Scholar] [CrossRef]
- Yamamoto, M.; Hayashi, Y.; Mohri, A. Garage parking planning and control of car-like robot using a real time optimization method. In Proceedings of the IEEE International Symposium on Assembly and Task Planning: From Nano to Macro Assembly and Manufacturing, Montreal, QC, Canada, 19–21 July 2005; pp. 248–253. [Google Scholar] [CrossRef]
- Bry, A.; Roy, N. Rapidly-exploring random belief trees for motion planning under uncertainty. In Proceedings of the IEEE international conference on robotics and automation, Shanghai, China, 9–13 May 2011; pp. 723–730. [Google Scholar] [CrossRef] [Green Version]
- Platt, R.; Tedrake, R.; Kaelbling, L.; Lozano-Pérez, T. Belief space planning assuming maximum likelihood observations. Robot. Sci. Syst. 2011, 6, 291–298. [Google Scholar]
- Van Den Berg, J.; Abbeel, P.; Goldberg, K. LQG-MP: Optimized path planning for robots with motion uncertainty and imperfect state information. Int. J. Rob. Res. 2011, 30, 895–913. [Google Scholar] [CrossRef]
- Patil, S.; Van Den Berg, J.; Alterovitz, R. Estimating probability of collision for safe motion planning under Gaussian motion and sensing uncertainty. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3238–3244. [Google Scholar] [CrossRef]
- Chakravorty, S.; Kumar, S. Generalized sampling-based motion planners. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 855–866. [Google Scholar] [CrossRef] [PubMed]
- Vitus, M.P.; Tomlin, C.J. Belief space planning for linear, Gaussian systems in uncertain environments. IFAC Proc. Vol. 2011, 44, 5902–5907. [Google Scholar] [CrossRef]
- Missiuro, P.E.; Roy, N. Adapting probabilistic roadmaps to handle uncertain maps. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1261–1267. [Google Scholar] [CrossRef] [Green Version]
- Blackmore, L.; Li, H.; Williams, B. A probabilistic approach to optimal robust path planning with obstacles. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar] [CrossRef] [Green Version]
- Blackmore, L.; Ono, M.; Williams, B.C. Chance-constrained optimal path planning with obstacles. IEEE Trans. Rob. 2011, 27, 1080–1094. [Google Scholar] [CrossRef] [Green Version]
- Burns, B.; Brock, O. Sampling-based motion planning with sensing uncertainty. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 3313–3318. [Google Scholar] [CrossRef]
- Burns, B.; Brock, O. Single-query motion planning with utility-guided random trees. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 3307–3312. [Google Scholar] [CrossRef]
- Pongpunwattana, A.; Rysdyk, R. Real-time planning for multiple autonomous vehicles in dynamic uncertain environments. J. Aerosp. Comput. Inf. Commun. 2004, 1, 580–604. [Google Scholar] [CrossRef]
- Im, G.; Kim, M.; Park, J. Parking line based SLAM approach using AVM/LiDAR sensor fusion for rapid and accurate loop closing and parking space detection. Sensors 2019, 19, 4811. [Google Scholar] [CrossRef] [Green Version]
- Lee, B.; Wei, Y.; Guo, I.Y. Automatic parking of self-driving car based on LiDAR. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 241–246. [Google Scholar] [CrossRef] [Green Version]
- Jo, K.; Jo, Y.; Suhr, J.K.; Jung, H.G.; Sunwoo, M. Precise Localization of an Autonomous Car Based on Probabilistic Noise Models of Road Surface Marker Features Using Multiple Cameras. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3377–3392. [Google Scholar] [CrossRef]
- Kant, K.; Zucker, S.W. Toward Efficient Trajectory Planning: The Path-Velocity Decomposition. Int. J. Rob. Res. 1986, 5, 72–89. [Google Scholar] [CrossRef]
- Lee, I.K.; Kim, M.S.; Elber, G. Polynomial/Rational Approximation of Minkowski Sum Boundary Curves. Graph. Model. Image Process. 1998, 60, 136–165. [Google Scholar] [CrossRef] [Green Version]
- Jensen, N.E. An Introduction to Bernoullian Utility Theory: I. Utility Functions. Swed. J. Econ. 1967, 69, 163–183. [Google Scholar] [CrossRef]
- Kochenderfer, M.J. Decision Making Under Uncertainty: Theory and Application, 1st ed.; MIT Press: Cambridge, MA, USA, 2015; pp. 57–75. [Google Scholar] [CrossRef]
- Jang, C.; Sunwoo, M. Semantic segmentation-based parking space detection with standalone around view monitoring system. Mach. Vis. Appl. 2019, 30, 309–319. [Google Scholar] [CrossRef]
- Akai, N.; Morales, L.Y.; Yamaguchi, T.; Takeuchi, E.; Yoshihara, Y.; Okuda, H.; Suzuki, T.; Ninomiya, Y. Autonomous driving based on accurate localization using multilayer LiDAR and dead reckoning. In Proceedings of the 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Sabet, M.T.; Mohammadi Daniali, H.; Fathi, A.; Alizadeh, E. A Low-Cost Dead Reckoning Navigation System for an AUV Using a Robust AHRS: Design and Experimental Analysis. IEEE J. Ocean. Eng. 2017, 43, 927–939. [Google Scholar] [CrossRef]
- Falcone, P.; Eric Tseng, H.; Borrelli, F.; Asgari, J.; Hrovat, D. MPC-based yaw and lateral stabilisation via active front steering and braking. Veh. Syst. Dyn. 2008, 46, 611–628. [Google Scholar] [CrossRef]
- Gao, Y.; Lin, T.; Borrelli, F.; Tseng, E.; Hrovat, D. Predictive control of autonomous ground vehicles with obstacle avoidance on slippery roads. In Proceedings of the Dynamic Systems and Control Conference, Cambridge, MA, USA, 12–15 September 2010; pp. 265–272. [Google Scholar] [CrossRef] [Green Version]
- Gray, A.; Gao, Y.; Lin, T.; Hedrick, J.K.; Tseng, H.E.; Borrelli, F. Predictive control for agile semi-autonomous ground vehicles using motion primitives. In Proceedings of the American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 4239–4244. [Google Scholar] [CrossRef]
- Anderson, S.J.; Peters, S.C.; Pilutti, T.E.; Iagnemma, K. Experimental study of an optimal-control- based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios. In Field and Service Robotics; Howard, A., Iagnemma, K., Kelly, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 62, pp. 59–68. [Google Scholar] [CrossRef]
- Li, S.; Li, K.; Rajamani, R.; Wang, J. Model predictive multi-objective vehicular adaptive cruise control. IEEE Trans. Control Syst. Technol. 2010, 19, 556–566. [Google Scholar] [CrossRef]
- Bageshwar, V.L.; Garrard, W.L.; Rajamani, R. Model predictive control of transitional maneuvers for adaptive cruise control vehicles. IEEE Trans. Veh. Technol. 2004, 53, 1573–1585. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An Open- Source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, 2009; Available online: https://www.willowgarage.com/sites/default/files/icraoss09-ROS.pdf (accessed on 23 June 2020).
- Kraft, D. A Software Package for Sequential Quadratic Programming. Forschungsbericht- Deutsche Forschungs- und Versuchsanstalt fur Luft- und Raumfahrt. 1988. Available online: http://www.opengrey.eu/item/display/10068/147127 (accessed on 23 June 2020).
- Johnson, S.G. The NLopt Nonlinear-Optimization Package. 2014. Available online: http://github.com/stevengj/nlopt (accessed on 23 June 2020).















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Lim, W.; Sunwoo, M. Robust Parking Path Planning with Error-Adaptive Sampling under Perception Uncertainty. Sensors 2020, 20, 3560. https://doi.org/10.3390/s20123560
Lee S, Lim W, Sunwoo M. Robust Parking Path Planning with Error-Adaptive Sampling under Perception Uncertainty. Sensors. 2020; 20(12):3560. https://doi.org/10.3390/s20123560
Chicago/Turabian StyleLee, Seongjin, Wonteak Lim, and Myoungho Sunwoo. 2020. "Robust Parking Path Planning with Error-Adaptive Sampling under Perception Uncertainty" Sensors 20, no. 12: 3560. https://doi.org/10.3390/s20123560
APA StyleLee, S., Lim, W., & Sunwoo, M. (2020). Robust Parking Path Planning with Error-Adaptive Sampling under Perception Uncertainty. Sensors, 20(12), 3560. https://doi.org/10.3390/s20123560