Ultrasonic Sensor Fusion Inverse Algorithm for Visually Impaired Aiding Applications


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Measurement Methods for Object Localization
2.1. 1D Measurement
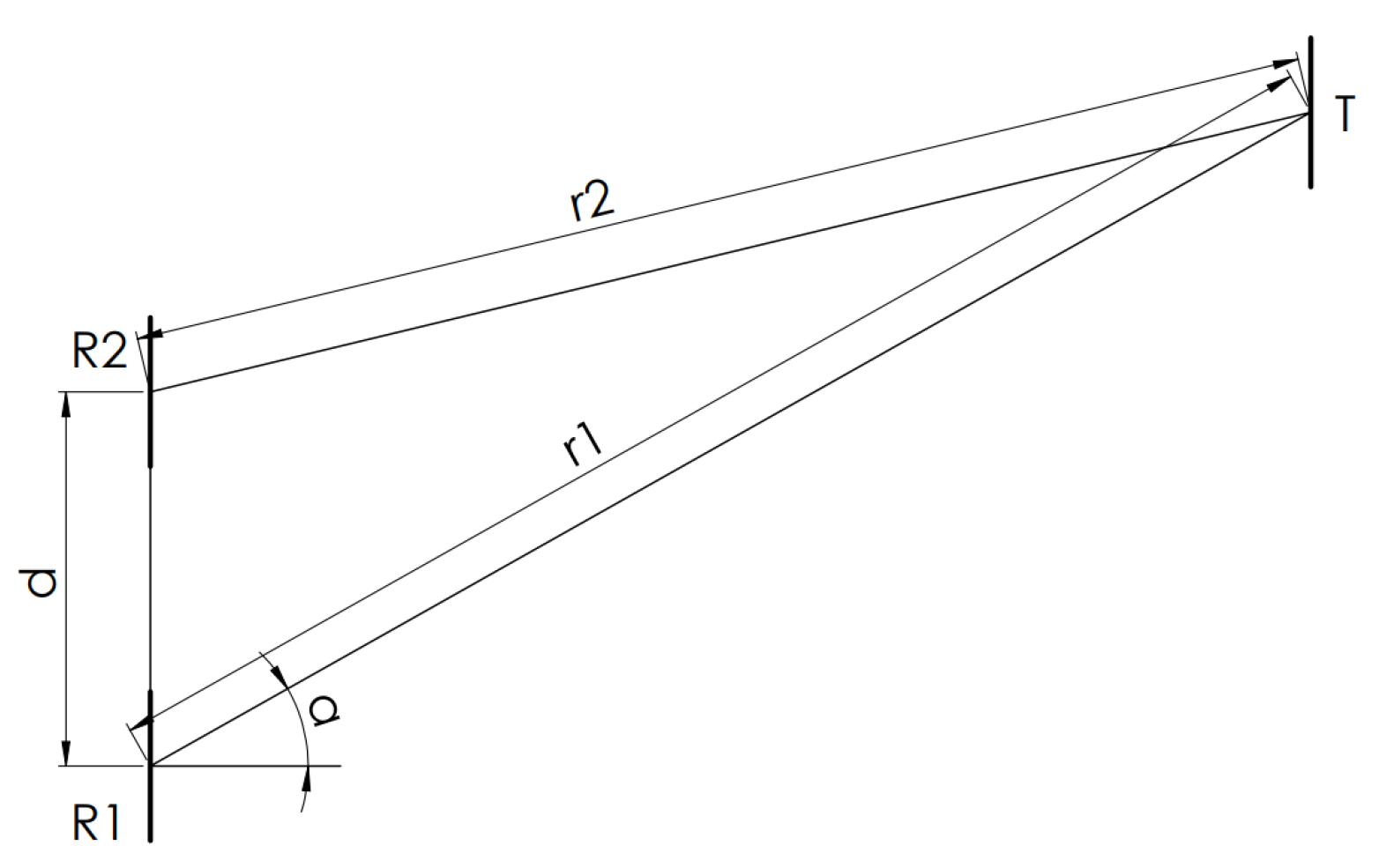
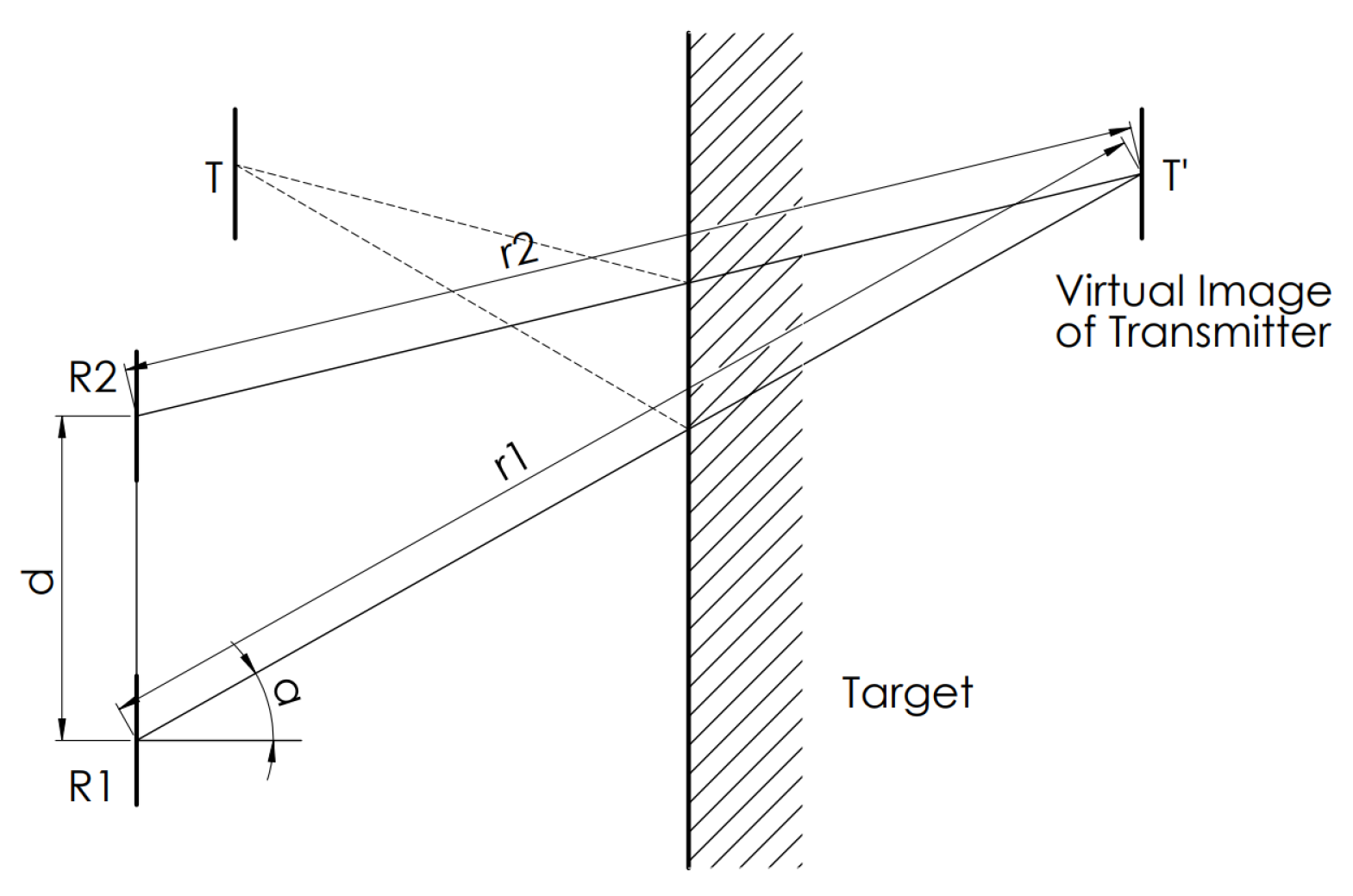
2.2. 2D Measurement
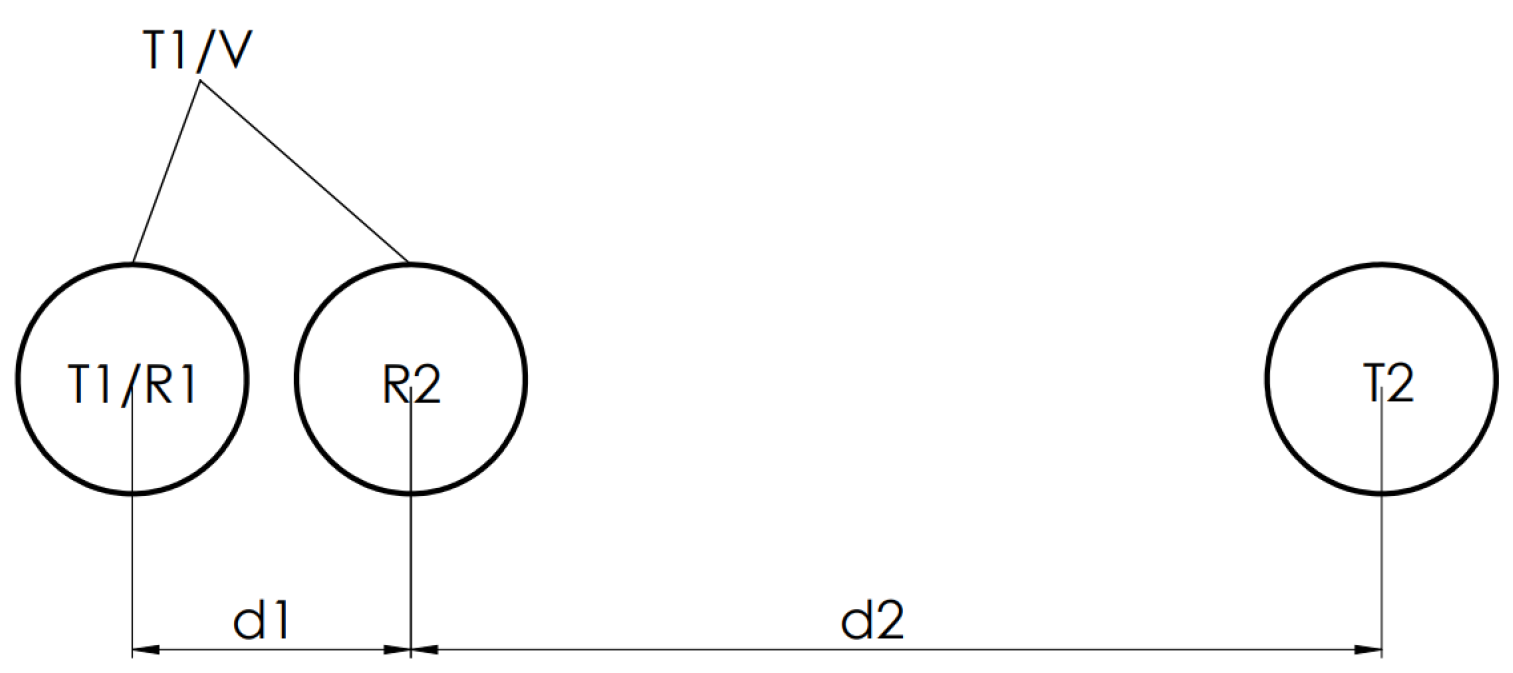
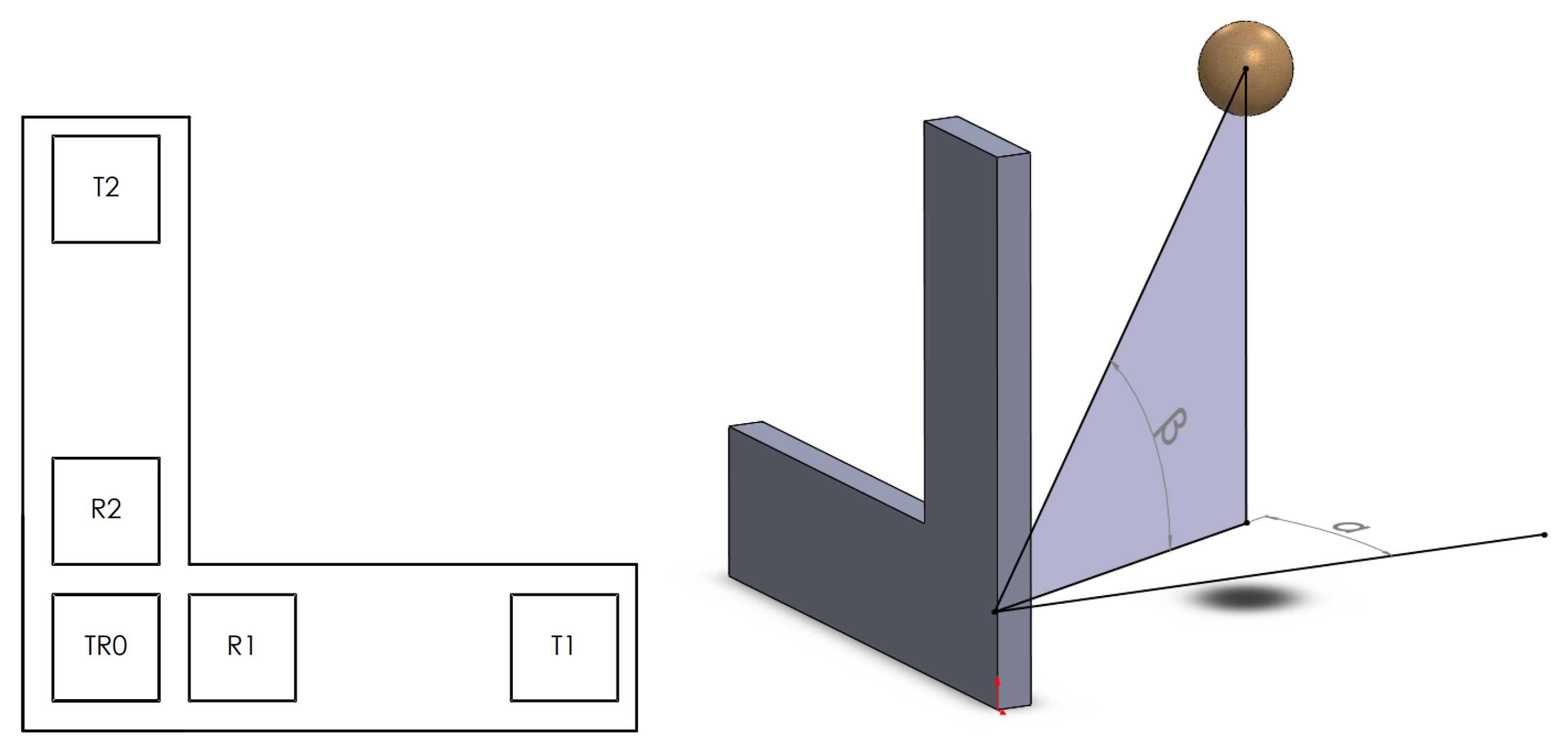
2.3. 3D Measurement
3. Fusion
4. Fusion of Ultrasonic Sensors
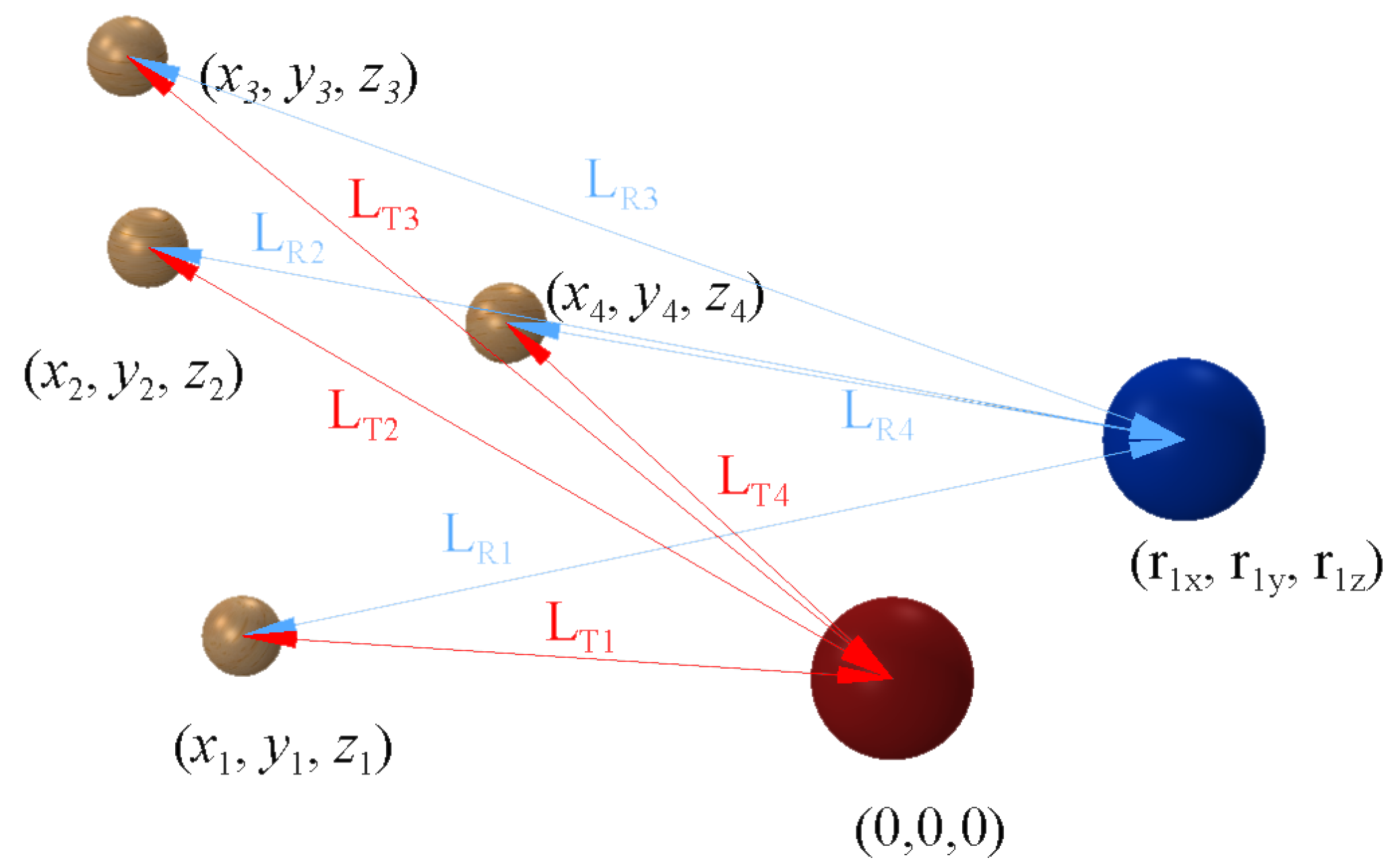
4.1. Creating the Matrix System for the 3D Mapping, and Calculating the Theoretical Distances for the Sensor Group
4.2. Finding Amplitude with Approximation
4.3. Reduction to Probability Variable
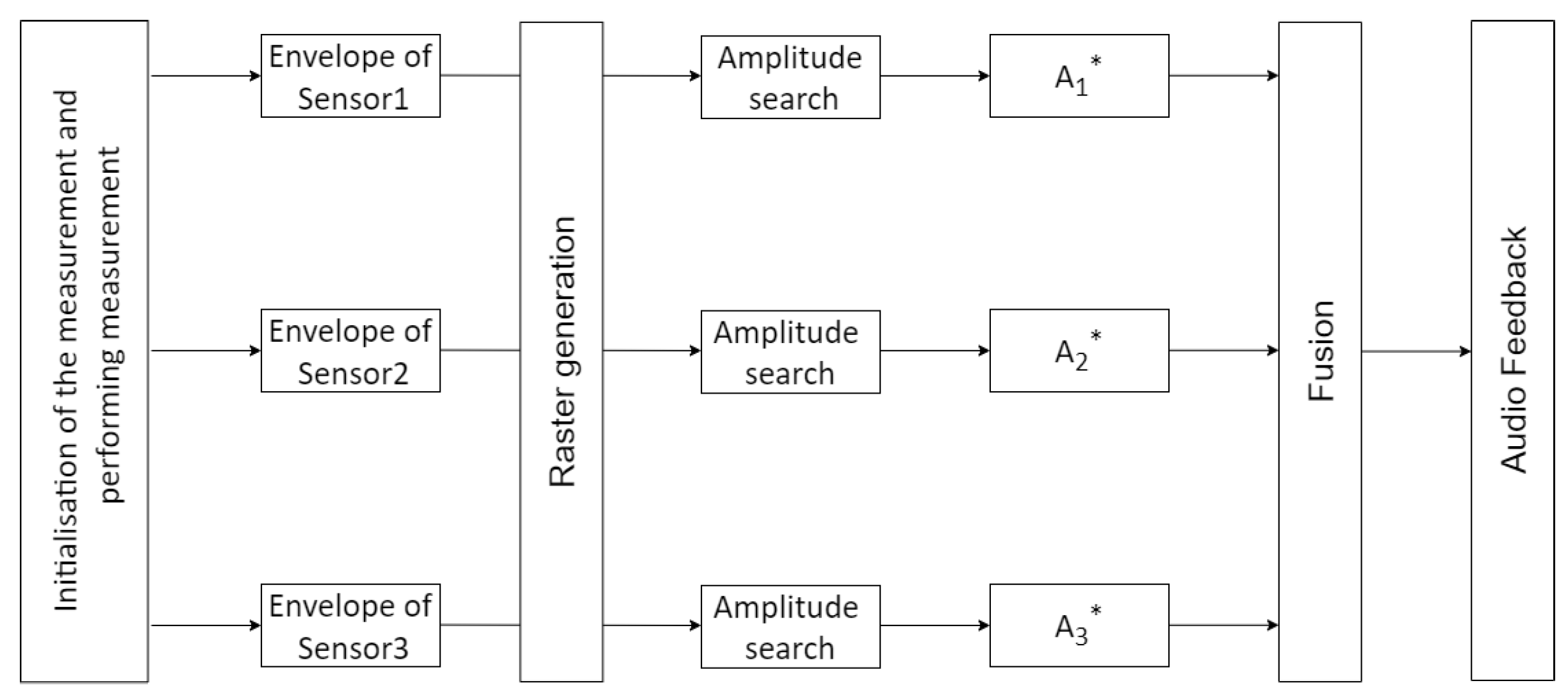
4.4. Sensor Fusion
5. Implementation of the Theory
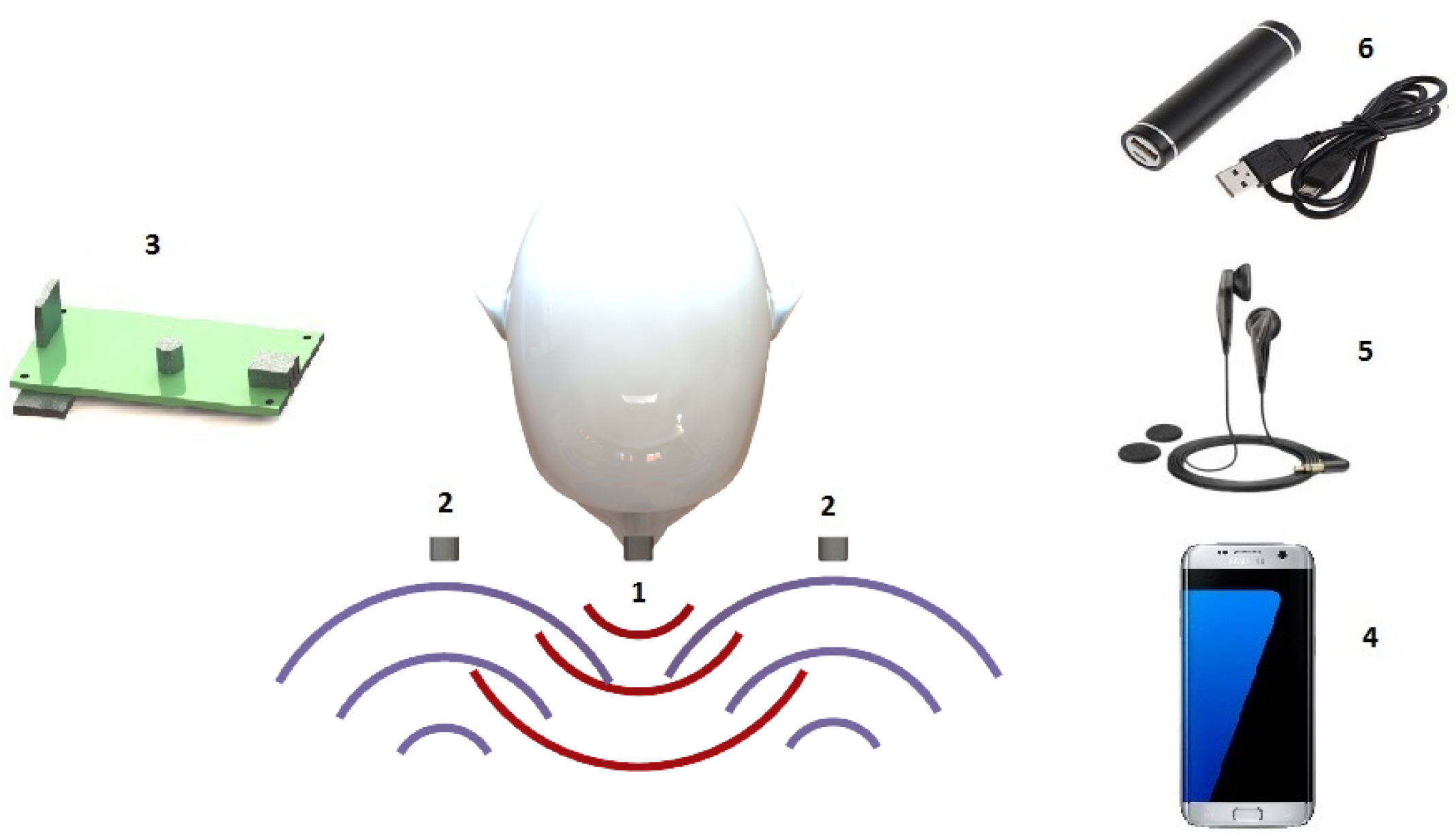
5.1. Implementation into Smart-Glasses
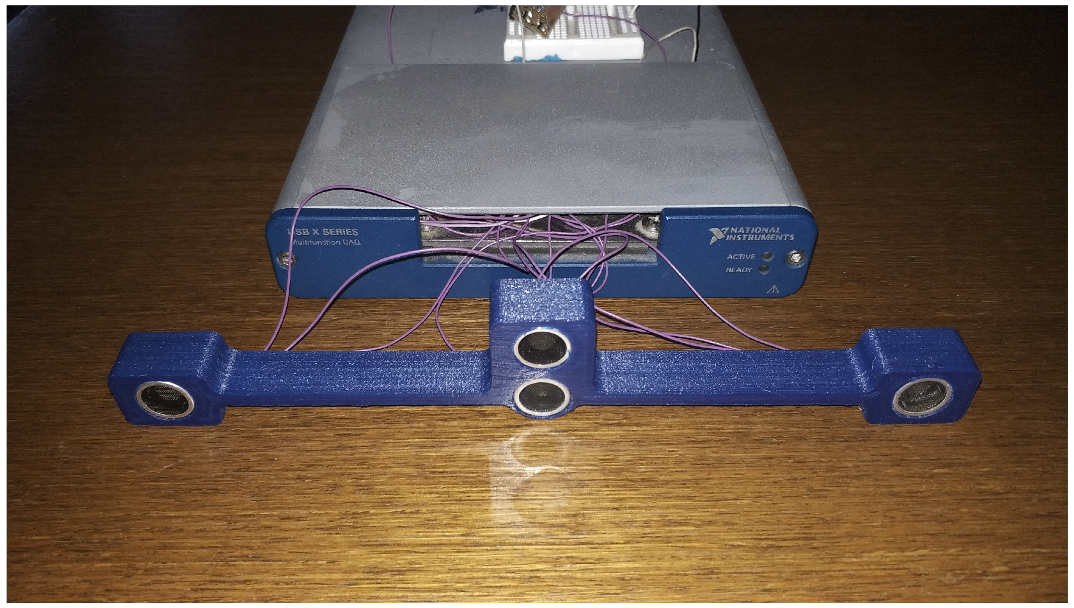
System Setup
5.2. Testing of the System
- influence of the number of the sensors
- influence of the measurement distance
- detection of small objects
- detection of several objects simultaneously
- detection of various materials
- detection of various shapes.
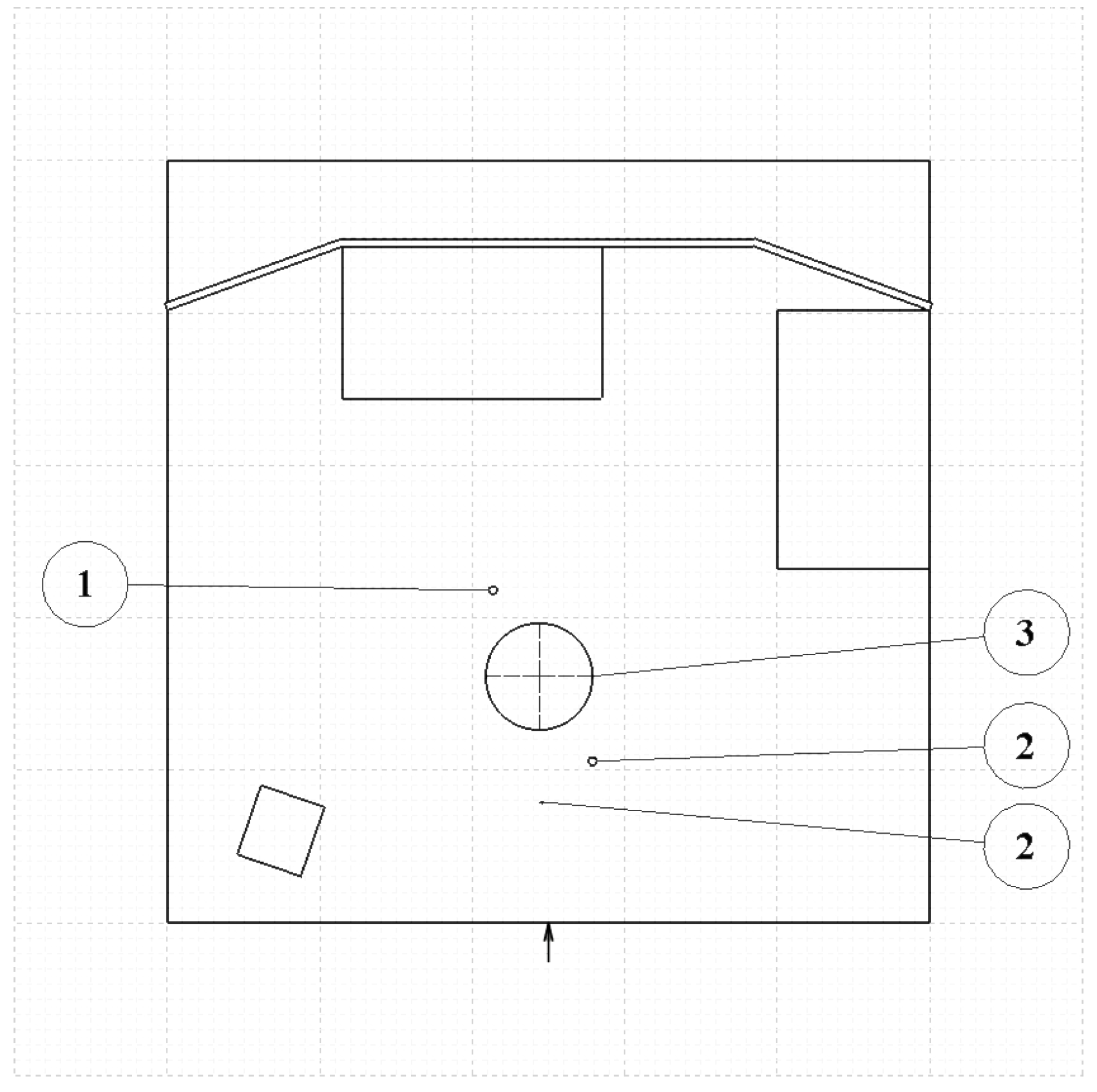
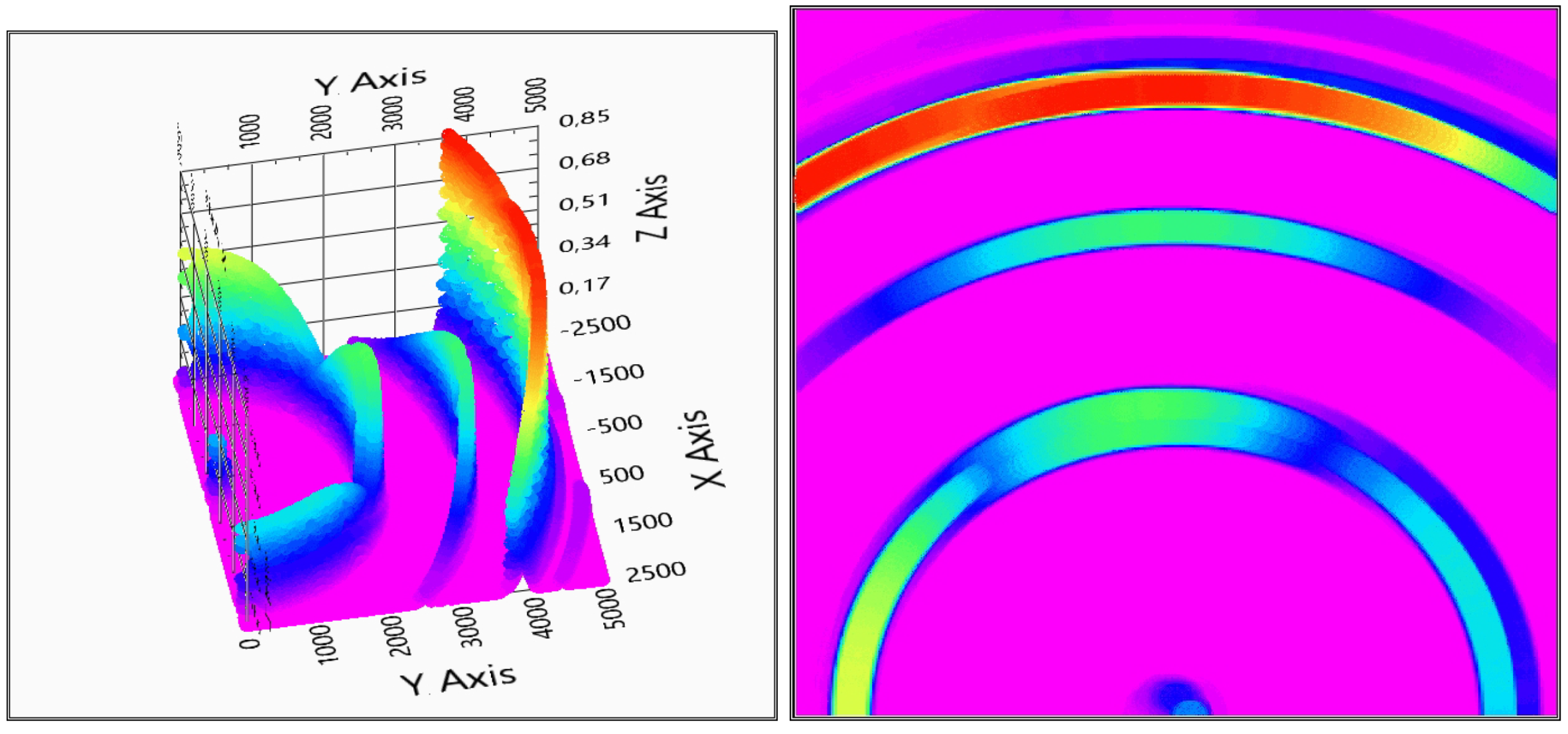
5.2.1. Indoor Test No. 1
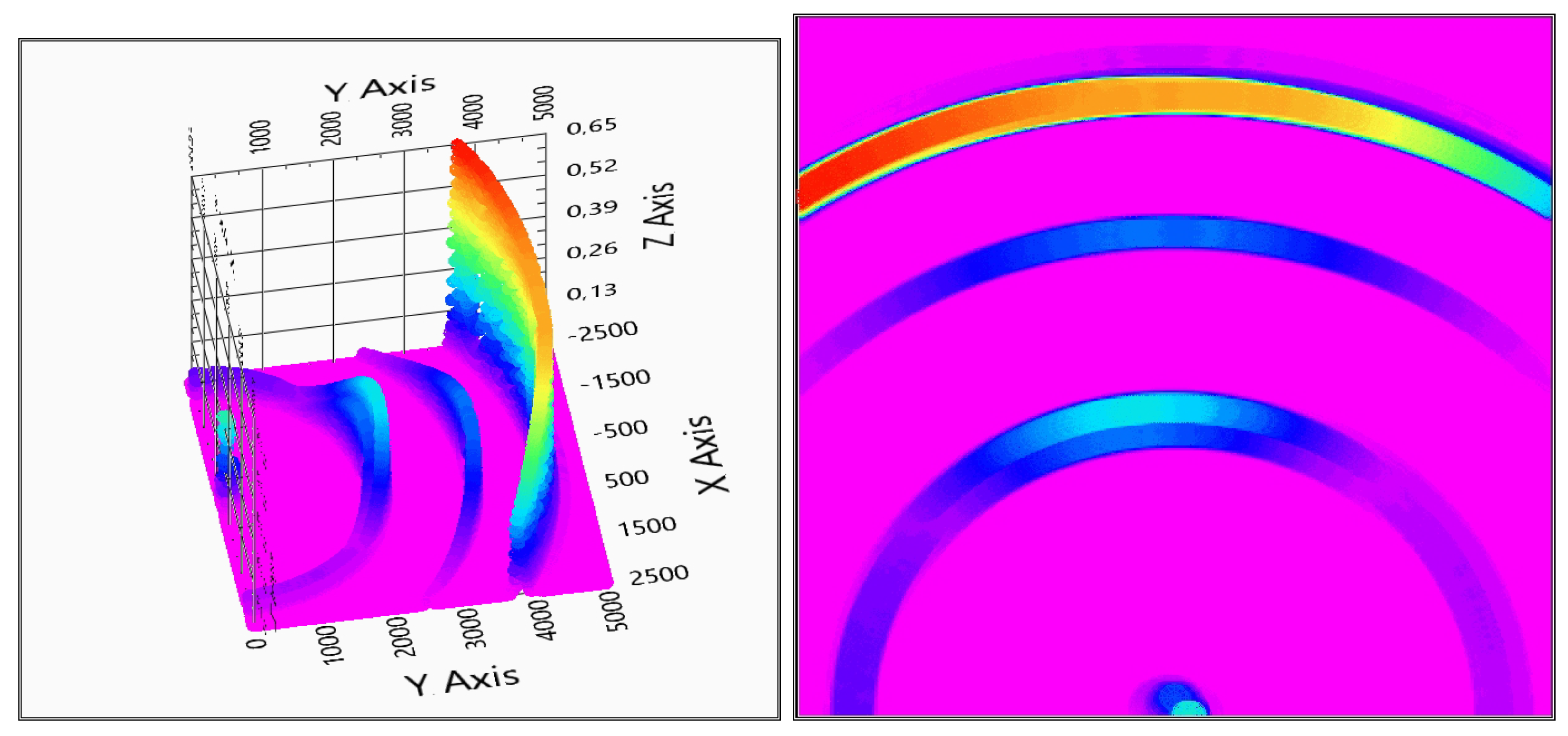
5.2.2. Indoor Test No. 2
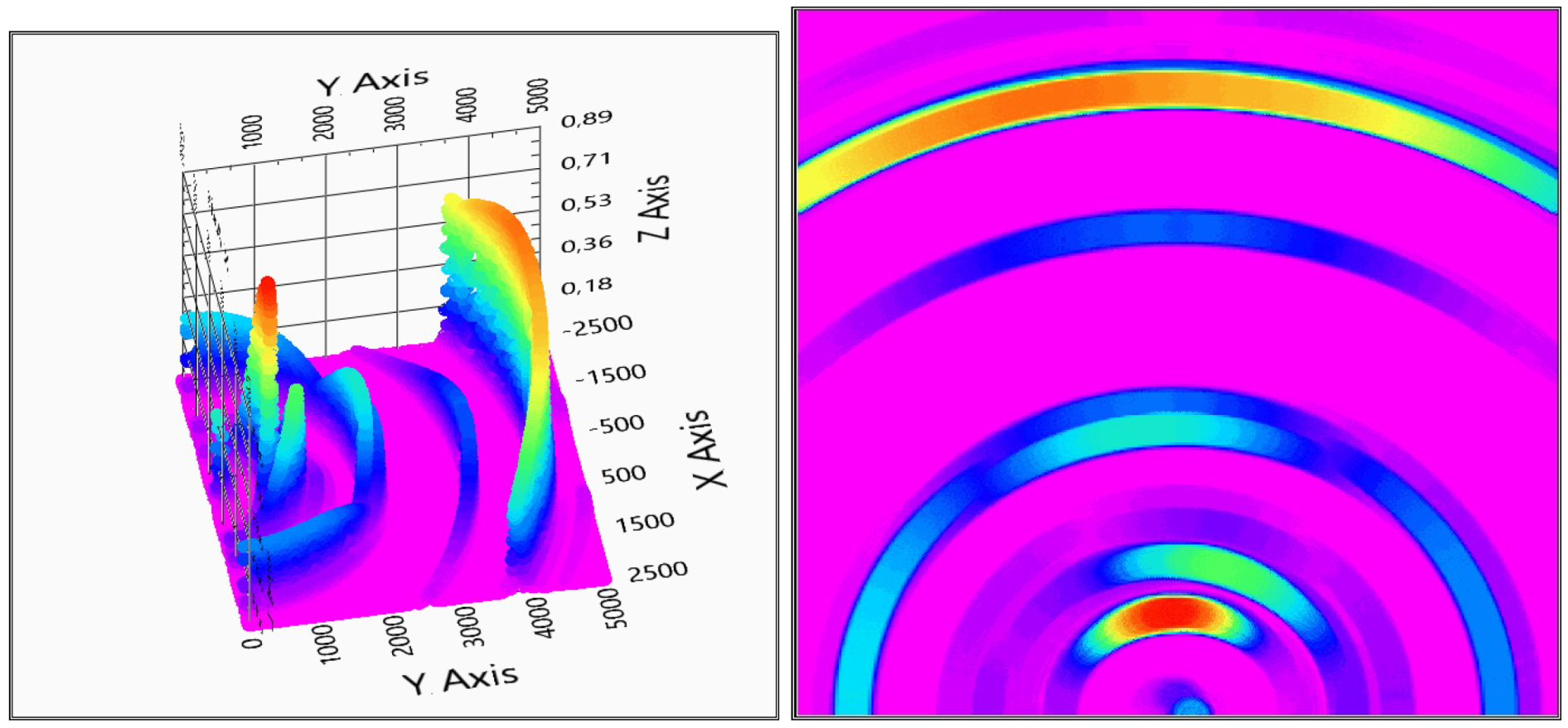
5.2.3. Indoor Test No. 3
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Csapó, Á.; Wersényi, G.; Nagy, H.; Stockman, T. A survey of assistive technologies and applications for blind users on mobile platforms: A review and foundation for research. J. Multimodal User Interfaces 2015, 9, 275–286. [Google Scholar] [CrossRef] [Green Version]
- Yuki, I.; Premachandra, C.; Sumathipala, S.; Sudantha, B.H. HSV Conversion Based Tactile Paving Detection for Developing Walking Support System to Visually Handicapped People. In Proceedings of the IEEE 23rd International Symposium on Consumer Technologies (ISCT), Ancona, Italy, 19–21 June 2019; pp. 138–142. [Google Scholar]
- Serrão, M.; Shahrabadi, S.; Moreno, M.; José, J.T.; Rodrigues, J.I.; Rodrigues, J.M.F.; du Buf, J.M.H. Computer vision and GIS for the navigation of blind persons in buildings. Univers. Access Inf. Soc. 2015, 14, 67–80. [Google Scholar] [CrossRef]
- Li, B.; Pablo Muñoz, J.; Rong, X.; Xiao, Y.; Tian, J.; Arditi, A. ISANA: Wearable Context-Aware Indoor Assistive Navigation with Obstacle Avoidance for the Blind. In Proceedings of the European Conference on Computer Vision, Computer Vision—ECCV 2016 Workshops, Amsterdam, The Netherlands, 8–16 October 2016; pp. 448–462. [Google Scholar]
- Rong, X.; Li, B.; Pablo Muñoz, J.; Xiao, J.; Arditi, A.; Tian, Y. Guided Text Spotting for Assistive Blind Navigation in Unfamiliar Indoor Environments. In Proceedings of the International Symposium on Visual Computing, ISVC 2016: Advances in Visual Computing, Las Vegas, NV, USA, 12–14 December 2016; pp. 11–22. [Google Scholar]
- Lin, M.; Yoon, J.; Kim, B. Self-Driving Car Location Estimation Based on a Particle-Aided Unscented Kalman Filter. Sensors 2020, 20, 2544. [Google Scholar] [CrossRef] [PubMed]
- Kanan, R.; Elhassan, O.; Bensalem, R. An IoT-based autonomous system for workers’ safety in construction sites with real-time alarming, monitoring, and positioning strategies. Autom. Constr. 2018, 88, 73–86. [Google Scholar] [CrossRef]
- Liu, J.; Han, J.; Lv, H.; Li, B. An Ultrasonic Sensor System Based on a Two-Dimensional State Method for Highway Vehicle Violation Detection Applications. Sensors 2015, 15, 9000–9021. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vijay Kiran, A.; Vetrivelan, P. IOT based vehicle parking assistance system. ARPN J. Eng. Appl. Sci. 2016, 11, 9. [Google Scholar]
- Shen, M.; Wang, Y.; Jiang, Y.; Ji, H.; Wang, B.; Huang, Z. A New Positioning Method Based on Multiple Ultrasonic Sensors for Autonomous Mobile Robot. Sensors 2020, 20, 17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mannay, K.; Ureña, J.; Hernández, Á.; Machhout, M.; Aguili, T. Characterization of an Ultrasonic Local Positioning System for 3D Measurements. Sensors 2020, 20, 2794. [Google Scholar] [CrossRef] [PubMed]
- Foix, S.; Alenyà, G.; Torras, C. Lock-in Time-of-Flight (ToF) Cameras: A Survey. IEEE Sens. J. 2011, 11, 3. [Google Scholar] [CrossRef] [Green Version]
- Akbarally, H.; Kleeman, L. A sonar sensor for accurate 3D target localization and classification. In Proceedings of the IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; pp. 3003–3008. [Google Scholar]
- Kleeman, L.; Kuc, R. An Optimal Sonar Array for Target Localization and Classification. In Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 3130–3135. [Google Scholar]
- Aguilera, T.; Paredes, J.A.; Alvarez, F.J.; Suárez, J.I. Acoustic Local Positioning System Using an iOS. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013; pp. 28–31. [Google Scholar]
- Paredes, J.A.; Álvarez, F.J.; Aguilera, T.; Villadangos, J.M. 3D Indoor Positioning of UAVs with Spread Spectrum Ultrasound and Time-of-Flight Cameras. Sensors 2017, 30, 12. [Google Scholar]
- Seco, F.; Jiménez, A.R.; Zampella, F. Fine-Grained Acoustic Positioning with Compensation of CDMA Interference. In Proceedings of the International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3418–3423. [Google Scholar]
- Lai, Q.; Yuan, H.; Wei, D.; Wang, N.; Li, Z.; Ji, X. A Multi-Sensor Tight Fusion Method Designed for Vehicle Navigation. Sensors 2020, 20, 2551. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Wang, P.; Zha, F.; Guo, W.; Jiang, Z.; Sun, L. A Strong Tracking Mixed-Degree Cubature Kalman Filter Method and Its Application in a Quadruped Robot. Sensors 2020, 20, 2251. [Google Scholar] [CrossRef] [PubMed]
- Fariña, B.; Toledo, J.; Estevez, J.I.; Acosta, L. Improving Robot Localization Using Doppler-Based Variable Sensor Covariance Calculation. Sensors 2020, 20, 2287. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nakajima, K.; Premachandra, C.; Kato, K. 3D environment mapping and self-position estimation by a small flying robot mounted with a movable ultrasonic range sensor. J. Electr. Syst. Inf. Technol. 2016, 4, 289–298. [Google Scholar] [CrossRef]
- Jörg, K.W.; Berg, M.; Müller, M. Using Pseudo-Random Codes For Mobile Robot Sonar Sensing. In Proceedings of the 3rd IFAC Symposium on Intelligent Autonomus Vehicles Madrid, Madrid, Spain, 25–27 March 1998; pp. 453–458. [Google Scholar]
- Foxlin, E.; Harrington, M.; Pfeifer, G. A wide-range wireless motion-tracking system for augmented reality and virtual set applications. In Proceedings of the 25th Annual Conference on Computer Graphics and Interactive Techniques, Orlando, FL, USA, 19–24 July 1998; pp. 371–378. [Google Scholar]
- Ward, A.; Jones, A.; Hopper, A. A new location technique for the active office. IEEE Pers. Commun. 1997, 4, 42–47. [Google Scholar] [CrossRef] [Green Version]
- Addlesee, M.; Curwen, R.; Hodges, S.; Newman, J.; Steggles, P.; Ward, A.; Hopper, A. Implementing a sentient computing system. Computer 2001, 34, 50–56. [Google Scholar] [CrossRef] [Green Version]
- Carotenuto, R.; Merenda, M.; Iero, D.; Della Corte, F.G. Mobile Synchronization Recovery for Ultrasonic Indoor Positioning. Sensors 2020, 20, 702. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leonard, J.J.; Durrant-Whyte, H.F. Mobile robotlocalization by tracking geometric beacons. IEEE J. Robot. Autom. 1991, 7, 376–382. [Google Scholar] [CrossRef]
- Curran, A.; Kyriakopoulos, K.J. Sensor-based self localization for wheeled mobile robots. In Proceedings of the IEEE Conference Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 8–13. [Google Scholar]
- Elfes, A. Sonar-based real world mapping and navigation. IEEE J. Robot. Autom. 1987, 3, 249–265. [Google Scholar] [CrossRef]
- Barna, B. Vakoknak és Gyengén Látóknak Fejlesztett, Ultrahanggal Működő Eszköz Tervezése és Gyártása—Development and Manufacturing of An Ultrasound Based Device for the Blind and Visually Impaired (In Hungarian). Master’s Thesis, Szćehenyi István University, Győr, Hungary, 2016. [Google Scholar]





















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovács, G.; Nagy, S. Ultrasonic Sensor Fusion Inverse Algorithm for Visually Impaired Aiding Applications. Sensors 2020, 20, 3682. https://doi.org/10.3390/s20133682
Kovács G, Nagy S. Ultrasonic Sensor Fusion Inverse Algorithm for Visually Impaired Aiding Applications. Sensors. 2020; 20(13):3682. https://doi.org/10.3390/s20133682
Chicago/Turabian StyleKovács, György, and Szilvia Nagy. 2020. "Ultrasonic Sensor Fusion Inverse Algorithm for Visually Impaired Aiding Applications" Sensors 20, no. 13: 3682. https://doi.org/10.3390/s20133682
APA StyleKovács, G., & Nagy, S. (2020). Ultrasonic Sensor Fusion Inverse Algorithm for Visually Impaired Aiding Applications. Sensors, 20(13), 3682. https://doi.org/10.3390/s20133682