1. Introduction
Lens distortion is a significant problem in the camera calibration process. This systematic error needs a precise modelling and calibration for imaging-based measurement techniques. Several different camera models have been proposed for different types of cameras. The most popular is the even-order radial distortion polynomial model that models radial distortion by means of scaling by a factor [
1]. However, results using the radial distortion model are not as accurate as desired when high distortion is present. If high distortion is present, several models exist in the literature. Ricolfe-Viala in [
2] compares the performance of the radial-tangential model, logarithmic, polynomial, division, and rational function distortion models with low and high distorted images under common criterion, showing that the division model and the rational function lens distortion model can represent high distortion accurately. In case of a wrong computed model, it can be refined with different methods, such as the disparity map method presented in [
3]. However, better model is computed if the calibration process takes into account the model details.
Accurate lens distortion correction is a very complex problem since different focus implies different distortion and moreover, the distortion differs if the distance between the object and the lens varies in the depth of field range for a given focus [
4]. If object location varies in the range of a sharply mapped image, deformations in the image change depending on this distance. The variations in distortion in the depth of field range are higher if fish-eye lenses are used.
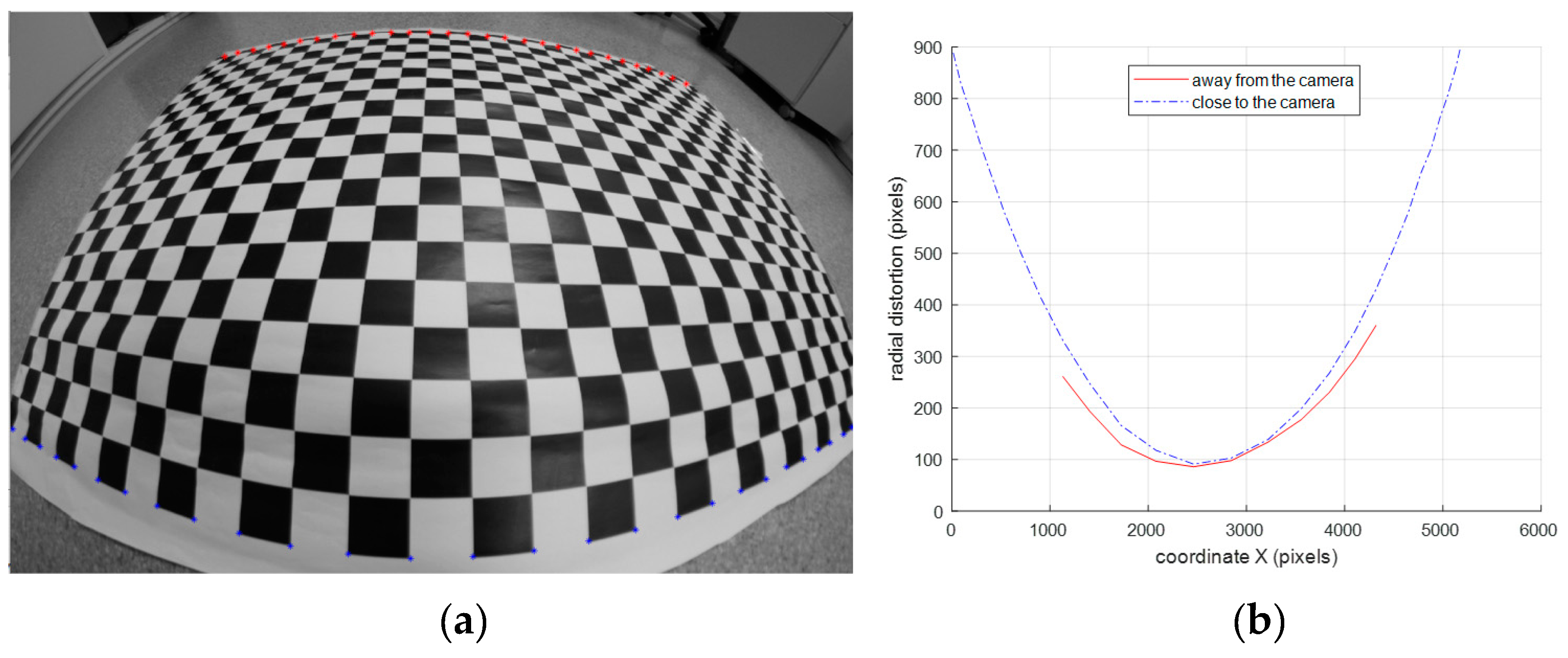
Figure 1 shows this strong perspective effect at diverse depth distances with respect to the camera with high distorted images.
Figure 1b shows the distortion profiles of the top and down lines with respect to the center of the image and the differences are obvious. Considering a common lens distortion model for all points in the image is not very convenient if an accurate correction is needed.
The depth dependence of lens distortion model was presented by Magill in [
4]. Considering the depth influence upon distortions avoid systematic measurement error. Magill demonstrated that lens distortion depends on magnification and established the radial distortion model dependent on magnification. Magill’s model computes lens distortion at any specified focus distance. However, this model is valid to points in the “in focus” depth distance only. Subsequent studies proposed magnification-dependent radial distortion models and calibration methods [
5,
6,
7,
8]. Brown [
5] proposed a distortion model dependent on magnification that considers distortion outside the “in focus” distance plane when the magnitude of the distortion is small. Fryer [
6] presented the decentering distortion formulation. Fraser and Shortis [
6] improved the model proposed by Brown to solve the problem of small magnitudes in distortion. Alvarez [
8] derived a new radial distortion model for planar scenes such as the soccer field combining Brown’s and Fraser’s models.
Based in results of Ricolfe-Viala in [
3,
9], the aim of this paper is to evaluate the depth dependence of the division model that is able to model high distortion accurately. First, the evaluation algorithm is described. Second, an empirical evaluation is performed. Third, a model is proposed based on the empirical evaluation results.
2. Materials and Methods
The image distortion model represents the mapping from the distorted image coordinates
qd = (
ud,
vd), to the undistorted image coordinates,
qp = (
up,vp) [
10]. Distorted coordinates are observable in the images and undistorted image coordinates are not physically measurable.
r is the distance from the point
q = (
u,v) to the distortion center, defined as
c0 = (
u0,
v0), and
Δu =
u −
u0, and
Δv =
v −
v0.
r is computed as
r2 = Δu2 + Δv2. Using the division model, the radial distortion is approximated with a polynomial as follows:
where
rp represents the distance of the point
qp = (
up,vp) to the distortion center and
rd is the distance of the point
qd = (
ud, vd) to the distortion center.
βi represent the distortion parameters. According to the degree of the polynomial in the denominator, the accuracy of the lens distortion model varies. However, the advantage of the division model over the other high lens distortion models is that it is able to express high distortion with few parameters [
2]. Most of the authors have demonstrated that accurate results are computed with only one parameter for many cameras [
11,
12]. In the experimental results section, outcomes of one parameter model are compared with the ones of the two parameters model. The aim is to measure the improvement when the number of parameters change.
2.1. Division Model Calibration
The model is calibrated based on the idea of metric point correction described in [
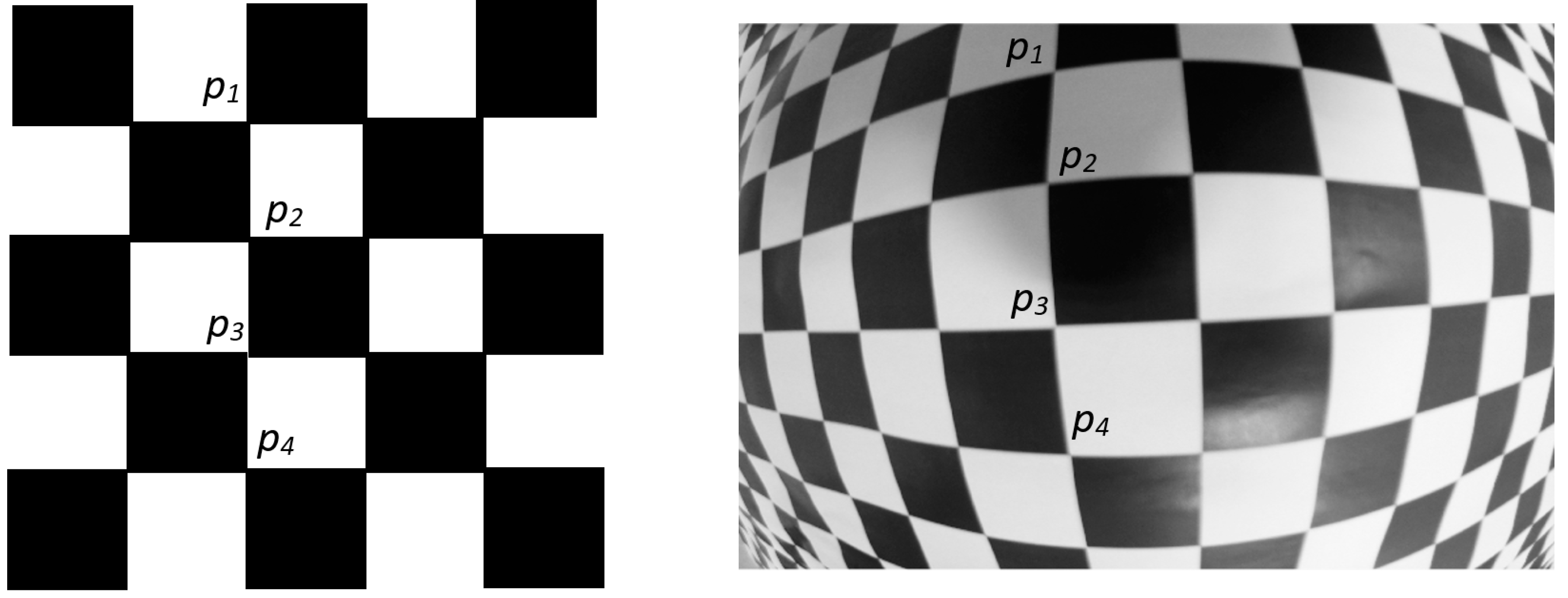
13]. The metric point correction consists of maintaining the features of the object in the image, to undistort the distorted control points. For example, control points of a checkerboard template accomplish several constraints that do not change under perspective projection. First constraint is the cross ratio (CR) between any set of four control points [
13] and the second one is that the control points that belong to a straight line in the checkerboard should remain in a straight line in the image [
14].
Figure 2 shows these two constraints. Using these constraints, control points in distorted images are corrected to obtain their undistorted positions. With both set of points, the distorted ones detected in the image and the undistorted ones computed using the previous constraints, the division model is computed. Cross ratio and straight line constraints for point correction are defined in the following.
2.1.1. Control Points Correction
If template control points in the image with coordinates
q1d = (
u1d,
v1d),
q2d = (
u2d,
v2d),
q3d = (
u3d,
v3d),
q4d = (
u4d,
v4d) satisfy the cross-ratio invariability, the following equation arise:
where
sij defines the distance between points
qi and
qj represented as
sij2 = (
ui −
uj)
2 + (
vi −
vj)
2;
p1,
p2,
p3,
p4 are four consecutive control points of the calibration template arranged in a line represented in
Figure 2. Any set of four consecutive control points arranged in a line in the calibration template, have to satisfy the
CR(
p1,
p2,
p3,
p4). These lines are vertical and horizontal. In consequence, one point participates in the cross ratio computing of six sets of points, three for horizontal neighbor points and three for vertical neighbor points. Using the cross ratio invariability, distorted positions of image points are corrected according to the positions of neighbor points doing a nonlinear search that minimizes the following error function:
Since a checkerboard template arranges control points in straight lines, n is the number of straight lines and m is the number of points in each line, qk,l is a point k of the straight line l, where l = 1, …, n and k = 1, …, m. CR(p1, p2, p3, p4) is computed when the calibration template is designed.
On the other side, given a control point
qi = (
ui,
vi) in the distorted image, the straight line constraint to undistort the control point position is defined with the straight line equation.
where
al,
bl,
cl represent the parameters of a line
l. Points that fit in a line perfectly, make the following function null.
To undistort all distorted image positions an error function is minimized that includes the cross-ratio invariability and the straight line constraint.
Minimizing previous function, distorted control points
qd,i are corrected to undistorted ones
qp,i.
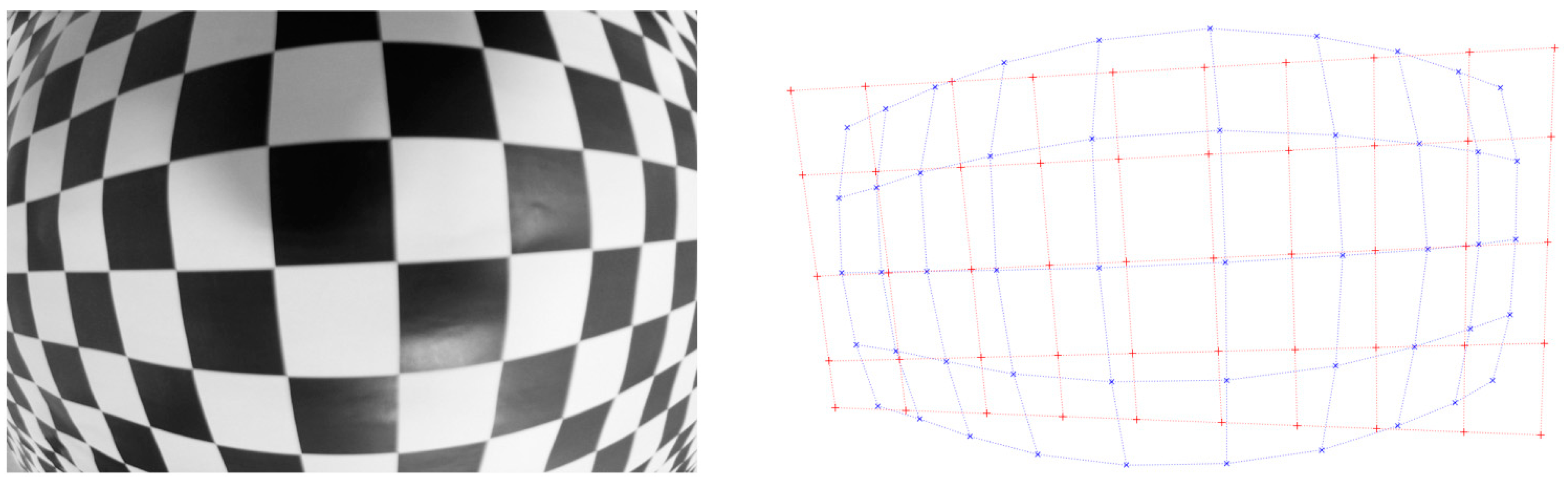
Figure 3 shows the result. Blue dots correspond to detected control points in the image
qd,i and red lines correspond to the undistorted control points
qp,i.
2.1.2. Computing the Model Parameters
The parameters of the division model described in (1) are the coefficients of the polynomial in the denominator denoted as
βi and the distortion center
u0,
v0. Given a set of distorted points
qd,i and the undistorted ones
qp,i, where
i represents the number of points in the image,
n pairs (
rd,i,
rp,i) arise, which are used to compute the coefficients
βi. Considering a two parameter model, two coefficients
βi are arranged in a vector
β = [
β0,
β1]
T and considering
u0,
v0 in the center of the image, given
n points in the image,
β is computed as follows:
Equation (2) is expressed as
a ·
β =
b. Using least squares, the algebraic solution of
β is computed as
β = (
aT ·
a)
−1 ·
aT ·
b. To improve the algebraic solution of
β and the initial value of the distortion center
u0,
v0, the Levenberg-Marquart algorithm can be used. The Levenberg-Marquart algorithm solves non-linear least squares problems, especially in least squares curve fitting. A function to minimize and the initial values for the parameters set are necessary. In this case, the error function to be minimized is:
This error function measures the mean radial distance between computed undistorted control points and distorted control points corrected with a given model. The set of parameters are β0, β1 and the distortion center u0, v0. Initial values for β0, β1 are the solution of (7) and u0, v0 is the center of the image. The minimization of the error function (8) computes the best values for β0, β1, u0, v0.
If a first-order division model is computed with only one parameter
β0, expression (7) is reduced as follows:
In this case, expression (8) is also reduced as:
To summarize, the image high distortion can be easily modelled with a first-order or second-order division model. To calibrate the division model, a set of distorted and undistorted points are needed. Distorted points are detected in the image and undistorted points are computed doing a metric correction taking into account that some constraints of the calibration template remain unchanged under perspective projection in a high distorted image. The calibration procedure is as follows:
A set of images from different camera-template distances are captured.
Control points are detected in captured images to obtain qd,i.
Control points are corrected to obtain
qp,i using the procedure described in
Section 2.1.1.
Using points of all images, camera parameters are computed with the algorithm described in
Section 2.1.2. This step is very important because data coming from all images are used together to compute one lens distortion model that represents all of them. According to
Figure 1, lens distortion is depth dependent. In consequence, to compute a unique model that represents lens distortion in images captured with different camera-template distances is not the best practice. To be rigorous, the depth dependence of the lens distortion has to be represented in the model to describe the distortion accurately.
2.2. Depth-Dependent Division Model Calibration
As it was shown in
Figure 1, lens distortion is distance dependent. In consequence, to adjust a unique model using data of images taken at different distances to the camera is not a very good practice. Moreover, images with different perspective give control points at different distances to the camera that fail in validating the calibration result. If so, biased parameters are computed. To obtain a lens distortion model that represent the true image deformation, this should depend on the camera-object distance. This means that all lens distortion model parameters should be dependent on the camera-template distance. In this case, a first- and second-order division model is adjusted. Therefore, parameters
β0,
β1 have to depend on the camera-object distance. To solve this problem, two functions
β0(
d) and
β1(
d) are proposed that give the value of the parameter
β0,
β1 for a given camera-object distance. In this case, the depth-dependent second-order division model is as follows:
where functions
β0(
d) and
β1(
d) represent the parameter
β0,
β1 for a given distance. To adjust the functions
β0(
d) and
β1(
d), an empirical experiment is proposed. Several checkerboard images are taken at different camera-template distances. Camera location in front of the checkerboard is adjusted to guarantee that the checkerboard plane is as parallel as possible to the image plane to avoid perspective that can influence in a bad result. This guaranties that all control points are in the same camera-object distance and a unique valid distortion model represents them. A set of images at different camera-checkerboard distances are taken to compute one parameter
β0,
β1 with every image. This is the main difference with the method to compute just one model to represent the lens distortion with independence to the camera-template distance. With one model, all control points from all images participate in the calibration of the model. Now, only control points coming from one image captured in a specific camera-template distance are used to compute one model that is valid for this distance. Using control points coming from images captured at different camera-template distances, a set of models are computed that are valid for a specific distance. The aim is to define functions
β0(
d) and
β1(
d) that are able to represent the evolution of parameters
β0,
β1 throw the different models that are valid for different distances.
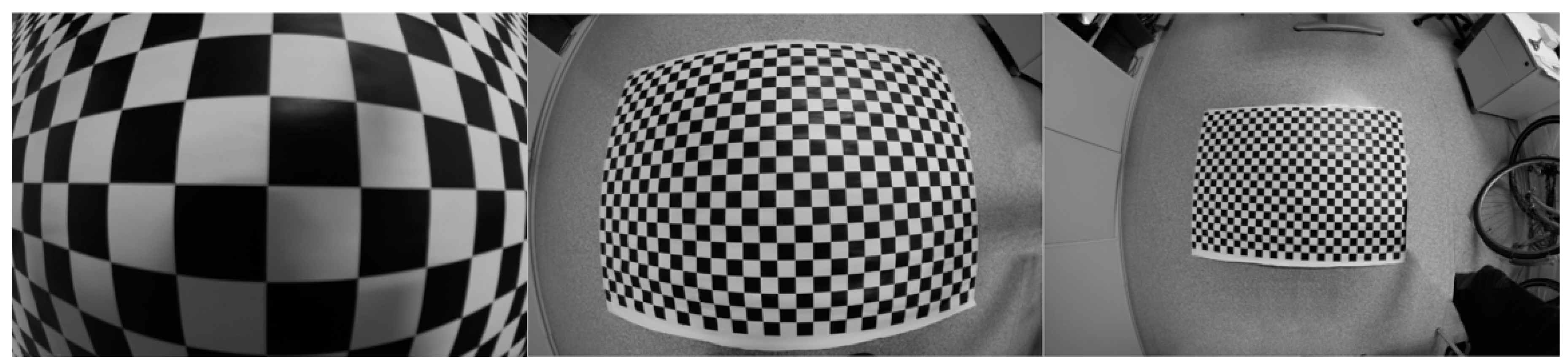
Figure 4 shows one example of images taken under these conditions. A set of parameters
β0,
β1 are computed with every image taken at different distances that are used to adjust the function
β0(
d) and
β1(
d) empirically.
3. Results
In our experiment, an EoSens
® 12CXP+ (Mikrotron, Unterschleißheim, Germany) of 4096 × 3072 pixels, 23.04 × 23.04 mm active area is assembled on an ABB IRB 140 showed in
Figure 5. Camera location is obtained by using the location of the end of the robot arm that is provided by its control unit. With this location, it is possible to know the camera-template distance and moreover, it is possible to orientate the camera sensor plane with the template plane to be as much parallel as possible. Two lenses with 8 mm and 12 mm manual focus are mounted on the camera to compare the results. The training model plane is a 1210 mm × 970 mm checkerboard with 580 corner points (29 × 20). Corner detection has been done with the function cvFindCheckerboardCorners() from the openCV library [
15].
Figure 3 shows distorted detected points in one image and their computed undistorted position.
Ten images, similar to the ones in
Figure 5, are taken at several camera-checkerboard distances with both lenses. Distances are from 300 mm to 1650 mm in steps of 150 mm. Twenty division models are computed, one for each image and for each lens. The process is as follows:
The checkerboard control points are detected in each image to obtain qd,i.
Distorted control points
qd,i are undistorted to obtain
qp,i using the metric correction method described in
Section 2.1.1.
Detected control points in each image qd,i and undistorted points in each image qp,i are used to adjust a particular division model for each image. A division model is adjusted as follows:
The algebraic solution is computed solving Equation (7) and considering as the distortion center the center of the image.
Model parameters and distortion center are refined minimizing the error function defined in (8).
One particular division model represents the distortion for one camera-template distance. The method to compute the model is described in
Section 2.1.2, but in this case, control points of one image are used instead of using control points of several images. The computed parameters with each model are
β0,
β1 and the distortion center
u0,
v0, that are valid for one distance.
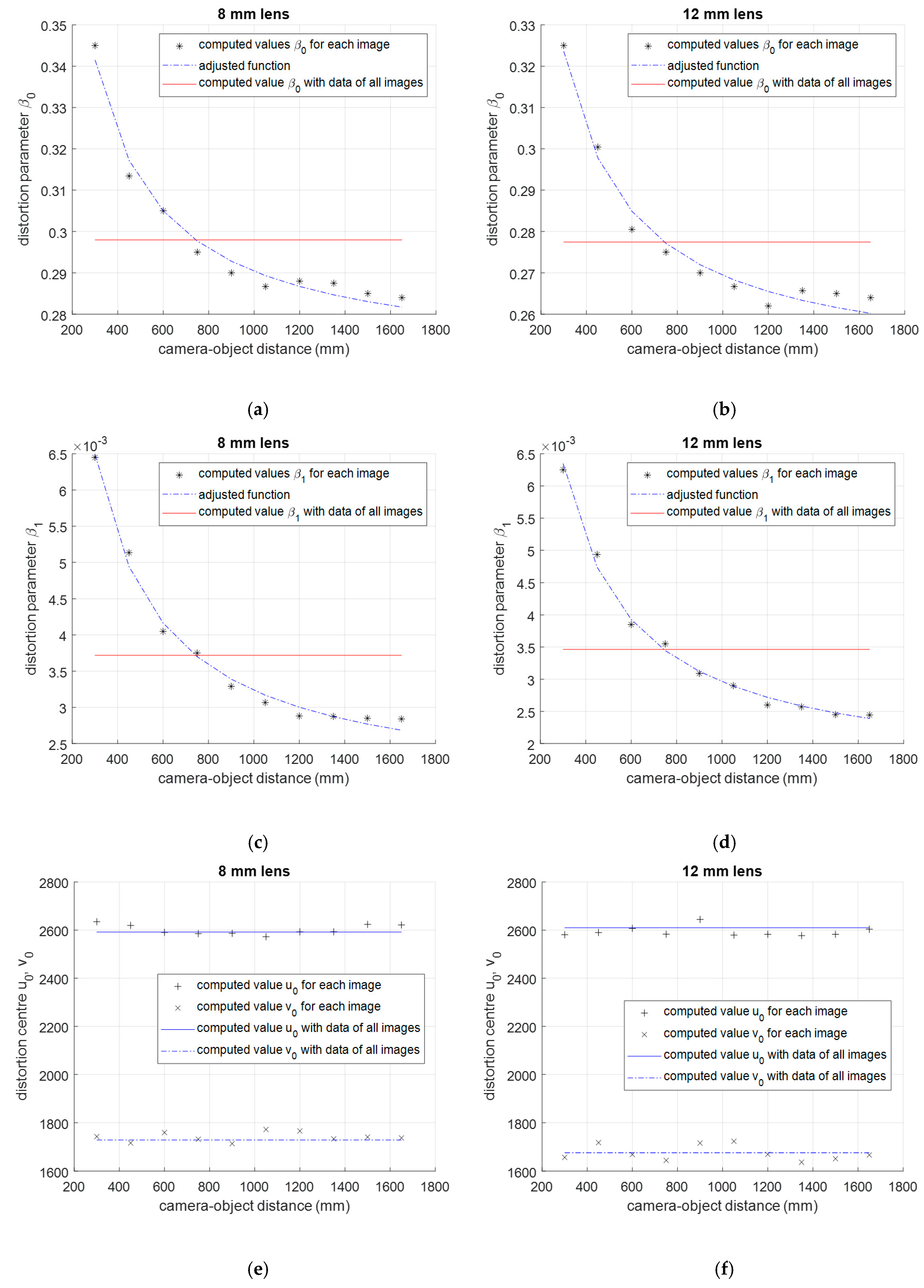
Figure 6 shows the computed parameters for each image for 8 mm and 12 mm lenses. The variation of lens distortion parameters depending on the distance is similar if 8 mm or 12 mm lens are used. Distortion center
u0,
v0 does not change significantly when the camera-checkerboard distance varies, but distortion parameters
β0,
β1 change as it is shown in
Figure 6a–d. As it was presented by Magill in [
3] and shown in
Figure 1, distortion is depth-dependent and distortion parameters are sensitive to the camera-object distance. The asterisks in
Figure 6a–d show the computed value of parameter
β0,
β1 for each image and both lenses respectively. According to the sensibility of parameters
β0i and
β1i to the distance, the values of the lens distortion parameters decreases with the distance in an exponential form. In consequence, the following experimental function can represent the variation of the distortion model parameter
β0,
β1 with the distance
d:
k0 and
k1 are the adjustable parameters. The aim is to represent the depth dependent variation of camera lens distortion parameters with the simplest function that is possible to describe this phenomenon. A mathematical analysis of this phenomenon would result in a more complex equation with more parameters to identify, but from a practical point of view, the empirical analysis shows that the two parameters equation proposed in (12) are enough to describe this phenomenon. The dashed lines in
Figure 6a–d show the value given by the functions
β0(
d) and
β1(
d) adjusted with the least squares technique using data
β0i and
β1i represented with asterisks. In both cases, using 8 mm lens or 12 mm lens, the variation of distortion parameters with camera-object distance is represented accurately. A more complex function presented in (12) does not improve the results significantly and it would only complicate the computing process. The function proposed in (12) is able to describe this phenomenon accurately in both cases.
If control points of all images were used to compute the distortion parameter
β, only one division distortion model would be computed for all images. Computed value is represented with a solid red line in the
Figure 6a–d.
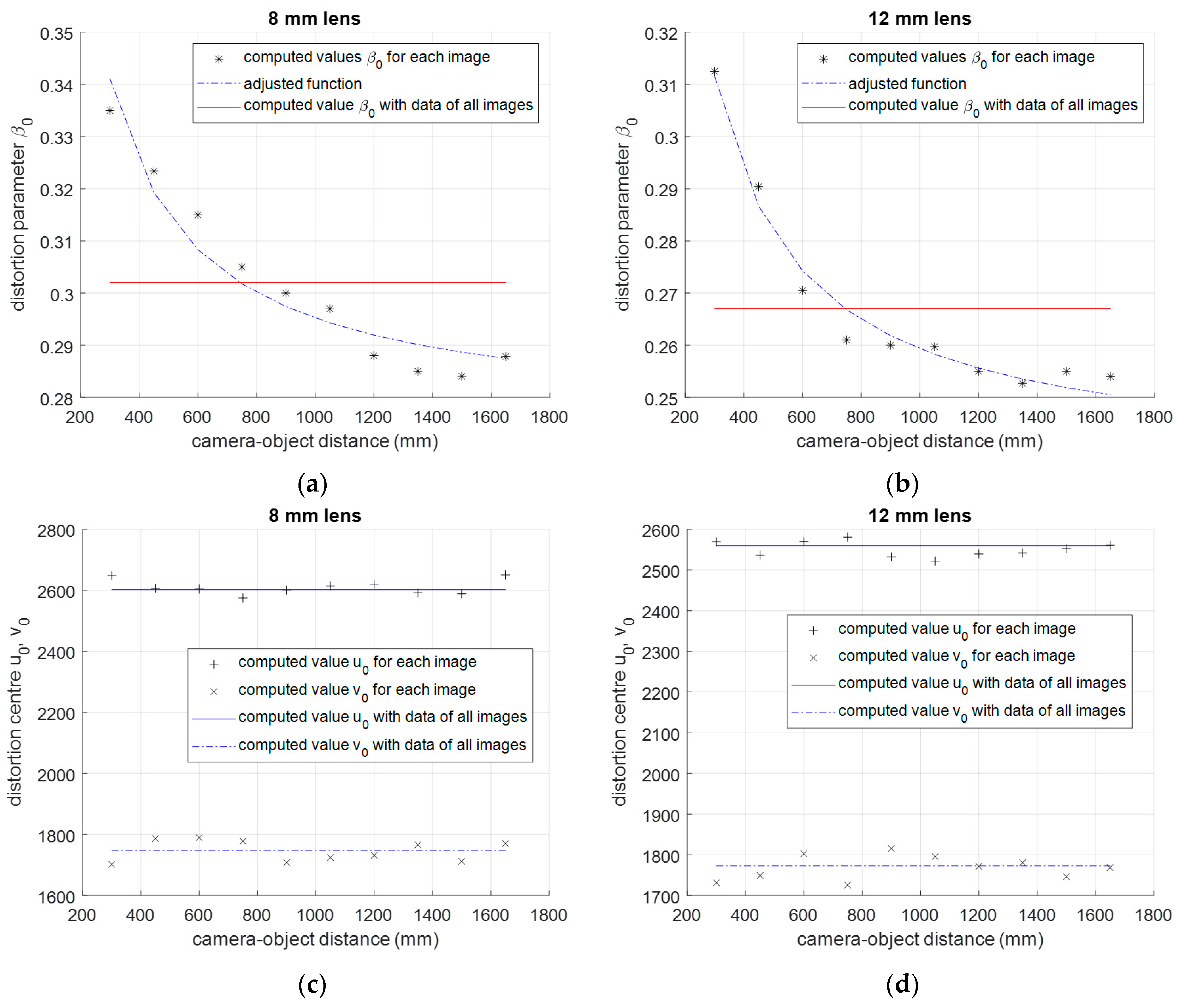
In addition, to simplify the lens distortion model also, a first-order division model is computed with the same data. In this case, the aim is to know how the division model degree can improve the distortion correction capacity of the model. The procedure is similar as before but in this case the division model is represented by the distortion center
u0,
v0, and one parameter
β0 only, instead of two
β0 and
β1 as before. The first degree depth dependent division model is defined as follows:
Using corrected and distorted control points of each image, initial value of
β0 is computed with Equation (9) and final values of
β0 and
u0,
v0 are computed with Equation (10).
Figure 7 shows that the variation of
β0 with respect to the camera-object distance is similar as before. In consequence, Equation (12) is also used to represent the depth dependency of lens distortion parameters with the camera-object distance. Asterisks in
Figure 7a,b show the computed value of parameter
β0 with each image and both lenses. The blue dashed line in the
Figure 7a,b is the computed values of function represented in (12) when it is adjusted using data
β0i represented with asterisks. The solid red line in the
Figure 7a,b represents the computed parameter
β0 using control points of all images together.
To compare the accuracy of the proposed method the error function defined in (8) and (10) is used. Equation (8) is for the second-order division model and Equation (10) is for the first-order one. This function measures the mean error radial distance between computed undistorted control points and distorted control points detected in the image and corrected with a given model. Compared models are the unique model computed with data of all images, the first-order depth-dependent division model and the second-order depth-dependent division model. All of them are compared with 8 mm and 12 mm lens. Results are shown in
Table 1 for 8 mm lens and
Table 2 for 12 mm lens. First and second row show the computed error using the second and first-order depth dependent division model for each image respectively. Third row shows the error using a unique division model that undistorts all images with independence of the camera-object distance. Analyzing 8-mm lens results, the error has a mean value from 5.08 to 2.45 with a standard deviation from 2.92 to 1.07 pixels using the depth-dependent model depending on the model order. If a unique model is used it increases from 9.85 to 7.73 with and standard deviation from 4.83 to 2.98. The depth dependent computed model projects all undistorted points in a range of ±2.92 pixels in the worst case and the unique model does it in a range of ±4.83 pixels. Depth-dependent model represents the distortion accurately and a second-order model does not improve the image correction significantly. Similar results are for 12 mm lens.
The proposed method suggests that the camera sensor plane has to be as parallel as possible to the template plane in order to be sure that the camera-template distance is similar at all areas of the image. To analyze the plane parallelism effects in the calibration process, an experiment is performed that captures images where the camera sensor plane is not parallel to the template plane. Small errors are induced in the capturing stage. In this case a first order division model is computed with images captured with 8 mm lens. Calibration deficiencies are measured using Equation (10). Values are shown in
Table 3. If they are compared with error values computed in
Table 1 where both planes were parallel, no significant difference exists.
4. Discussion
Attending to the results presented in
Table 1 and
Table 2, the depth dependent distortion model is able to correct the image more accurately if it is compared to the non-depth-dependent model. The depth dependence is not considered if a unique model is computed using data from several images captured in different camera-object distances. In consequence, a biased model is computed that does not represent the distortion accurately taking into account that lens distortion is a depth-dependent phenomenon.
The variation of lens distortion parameters with the camera-object distance can be described with the equation proposed in (12) easily. A more complex function does not improve the results significantly. Going deeper, the Equation (12) is able to represent variation of lens distortion parameters when the model changes from first to second degree or when the lens changes. In this case, it has been validated for 8 mm and 12 mm lenses.
From the point of view of the degree of the division model, a first-order degree model corrects the image distortion acceptably but it can be improved with a second-order model if necessary.
With the proposed method, images are captured without perspective to have similar camera-checkerboard distance in all parts of the image. Since the image plane is as parallel as possible to the camera sensor plane, image focusing is easier and all control points in the image are focused. This improves the detection of control points in the image and reduces the noise level in the calibration process. With existing methods, the image perspective makes the focusing process harder and some parts in the image are blurred.
It may be considered that the proposed method is useless because it needs special equipment to perform the lens distortion calibration. In this case, a robot arm is used to localize the camera and to measure the camera-checkerboard distance. However, similar results are computed if the camera is localized with a tripod and camera-object distance is measured. As it is demonstrated in
Table 3, perfect parallelism between the camera sensor plane and the checkerboard plane is not definitive to obtain accurate results.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}