Modeling Fabric Movement for Future E-Textile Sensors


Abstract
:1. Introduction
2. Materials and Methods
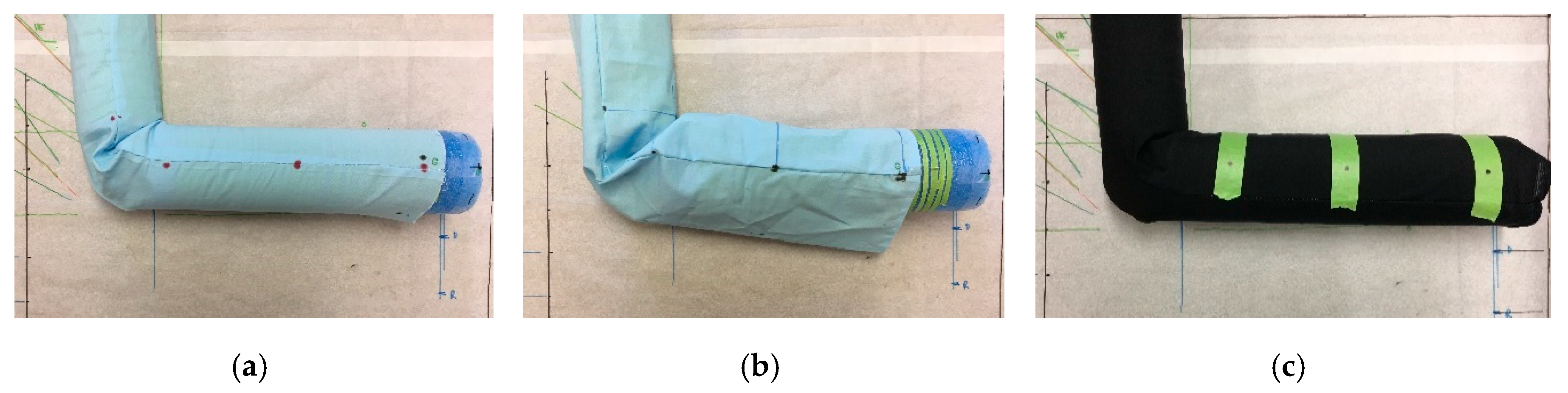
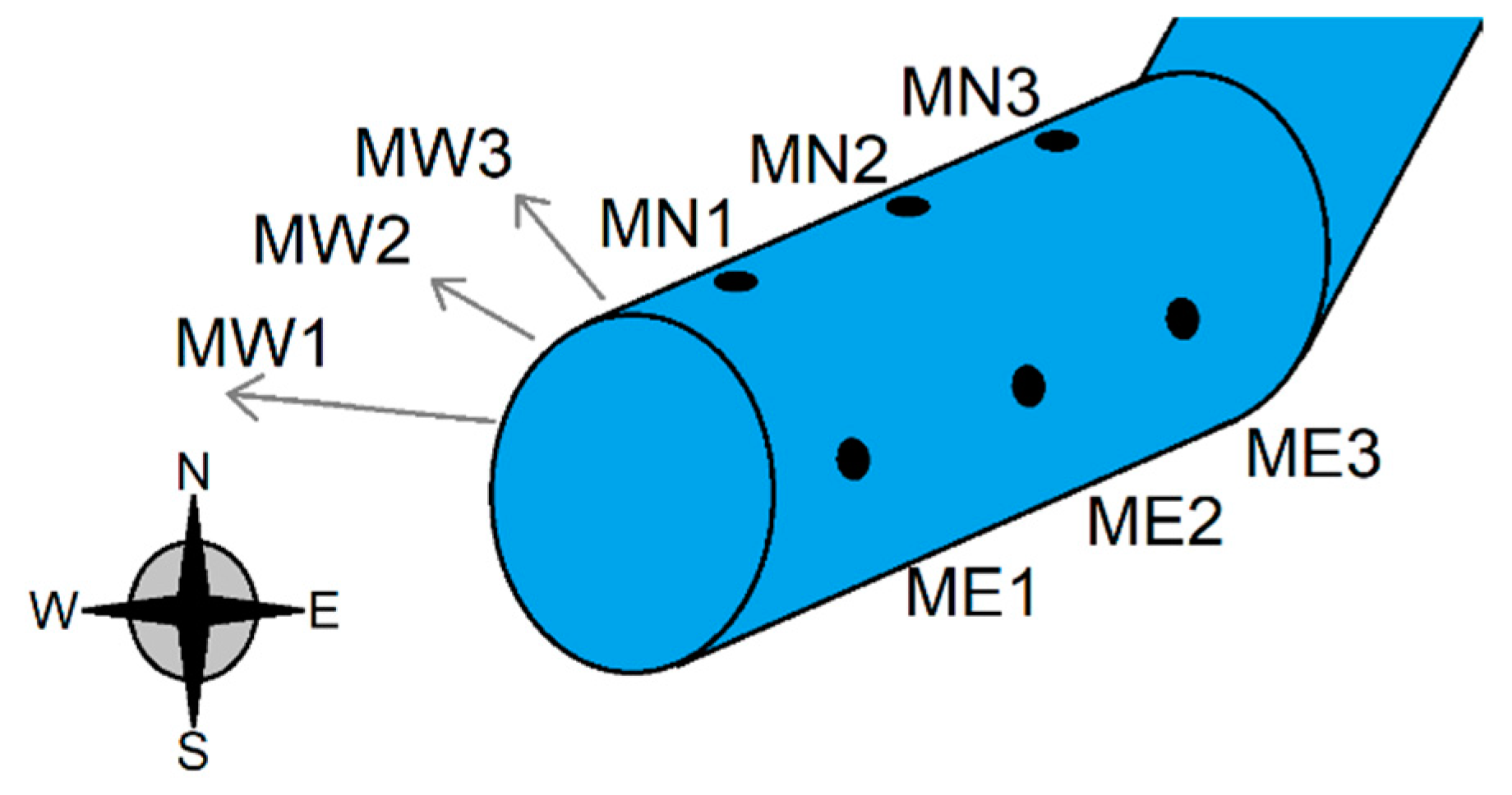
2.1. Phantom Model and Physical Markers
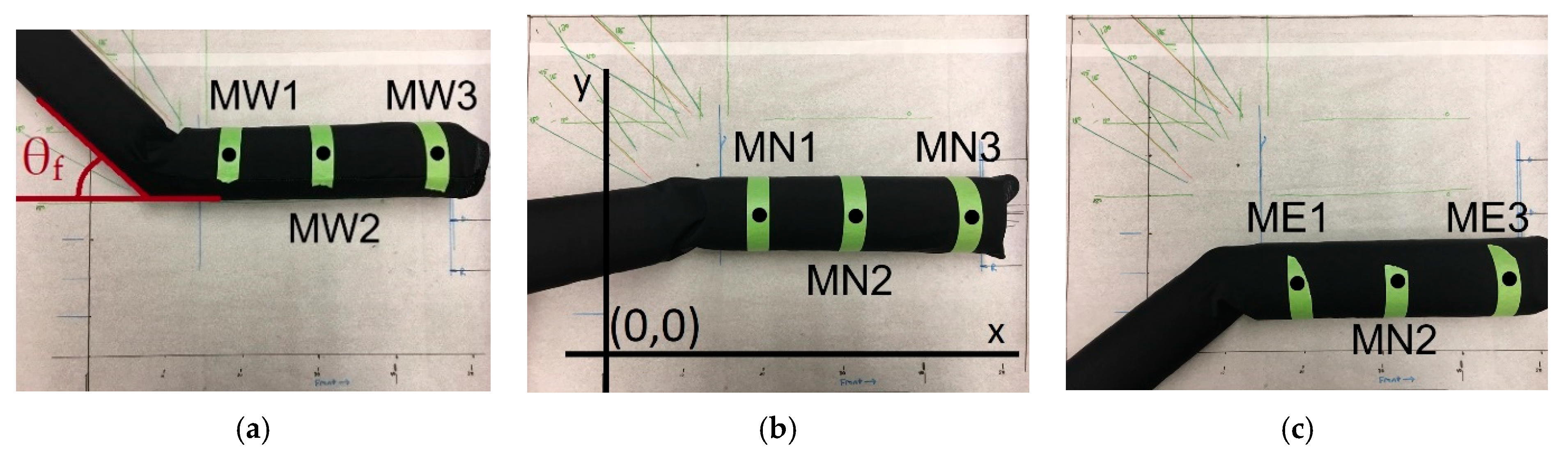
2.2. Marker-Based Image Processing Approach
2.3. Experimental Approach and Data Collection
3. Results
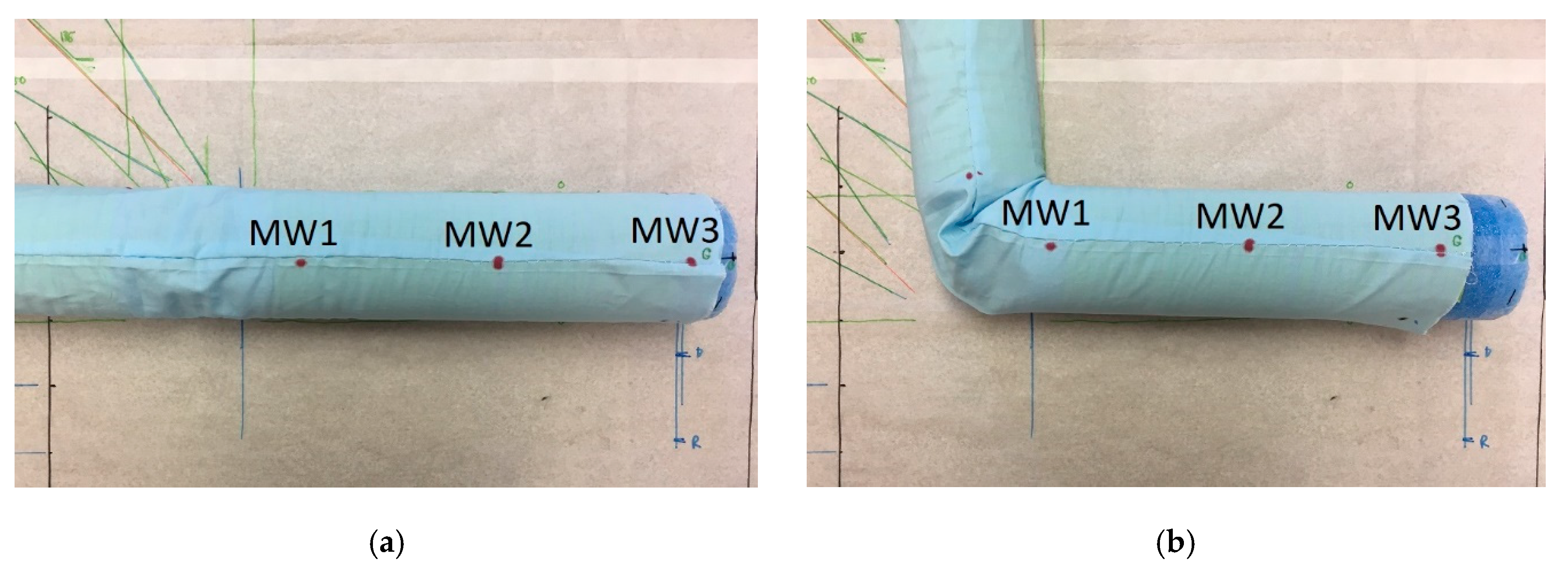
3.1. Qualitative Observations
3.2. Quantitative Observations of Sleeve Motion over Time
3.3. Quantitative Observations of Marker Diplacement with respect to Flexion Angle (θf)
3.4. Quantitative Comparison of Stretchy Sleeves with Varying Elasticities
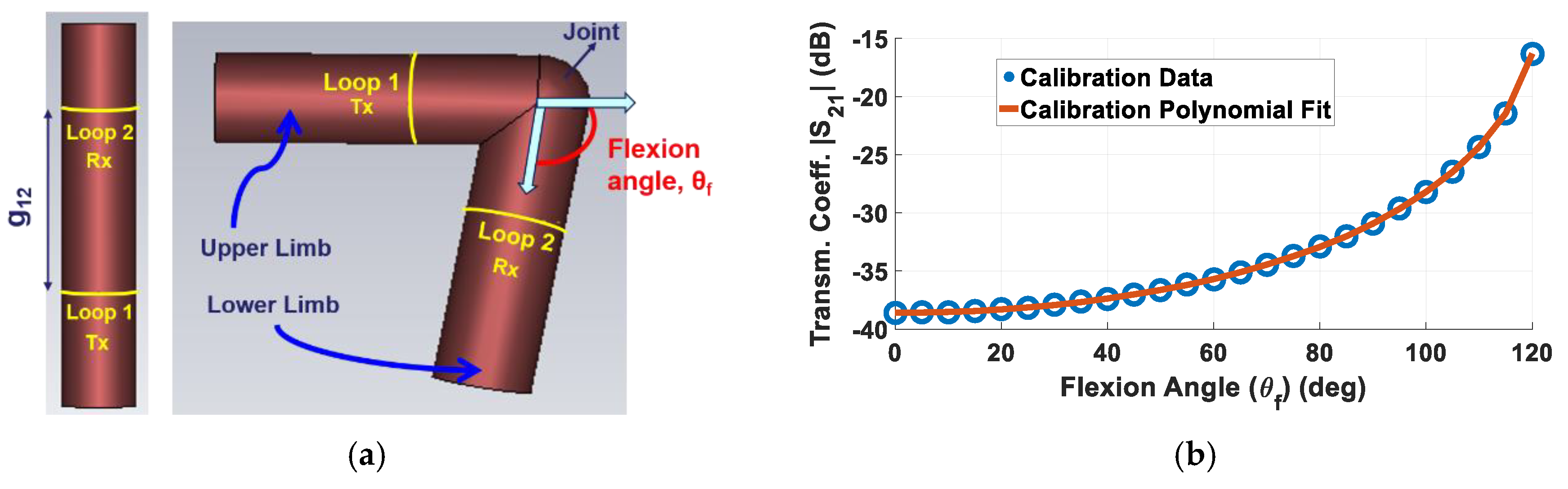
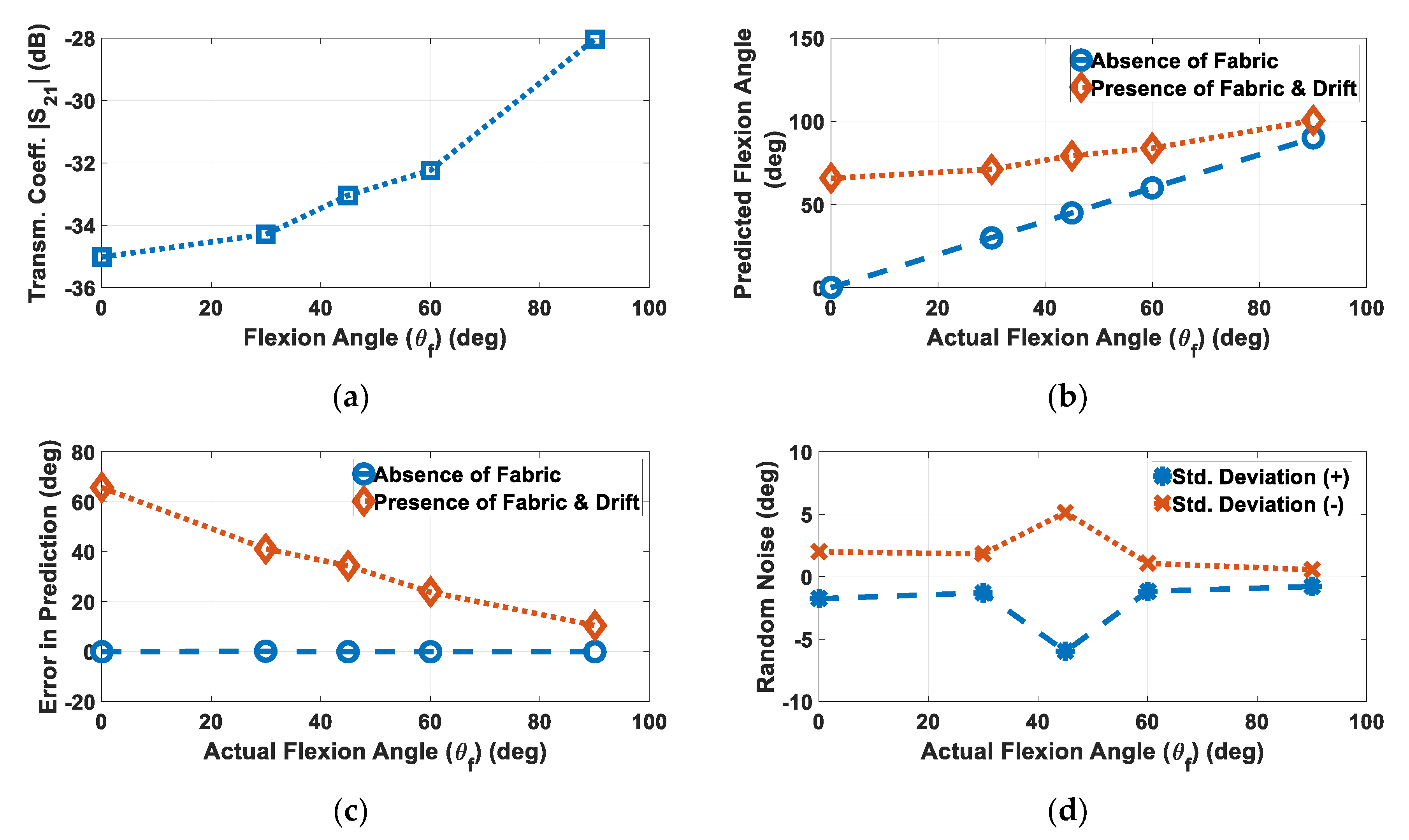
3.5. Case Study: E-Textile Sensor in the Absence/Presence of Fabric and Corresponding Drift
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait Analysis Using Wearable Sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef]
- Mannini, A.; Sabatini, A.M. Machine learning methods for classifying human physical activity from on-body accelerometers. Sensors 2010, 10, 1154–1175. [Google Scholar] [CrossRef] [Green Version]
- Stoppa, M.; Chiolerio, A. Wearable electronics and smart textiles: a critical review. Sensors 2014, 14, 11957–11992. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, C.C.; Hsu, Y.L. A review of accelerometry-based wearable motion detectors for physical activity monitoring. Sensors 2010, 10, 7772–7788. [Google Scholar] [CrossRef] [PubMed]
- Deshmukh, S.D.; Shilaskar, S.N. Wearable sensors and patient monitoring system: A review. In Proceedings of the International Conference on Pervasive Computing (ICPC), Pune, India, 8–10 January 2015; pp. 1–3. [Google Scholar]
- Bonato, P. Wearable sensors and systems: From enabling technology to clinical applications. IEEE Eng. Med. Biol. Mag. 2010, 29, 25–36. [Google Scholar] [CrossRef] [PubMed]
- Nag, A.; Mukhopadhyay, S.C.; Kosel, J. Wearable flexible sensors: A review. IEEE Sens. J. 2017, 17, 3949–3960. [Google Scholar] [CrossRef] [Green Version]
- Salonen, P.; Rahmat-Samii, Y.; Schaffrath, M.; Kivikoski, M. Effect of textile materials on wearable antenna performance: A case study of GPS antennas. In Proceedings of the IEEE Antennas and Propagation Society Symposium, Monterey, CA, USA, 20–25 June 2004; pp. 459–462. [Google Scholar]
- Lui, K.; Murphy, O.; Toumazou, C. A Wearable wideband circularly polarized textile antenna for effective power transmission on a wirelessly-powered sensor platform. IEEE Trans. Antennas Propag. 2013, 61, 3873–3876. [Google Scholar] [CrossRef]
- Shin, K.Y.; Hong, J.Y.; Jang, J. Micropatterning of graphene sheets by inkjet printing and its wideband dipole-antenna application. Adv. Mater. 2011, 23, 2113–2118. [Google Scholar] [CrossRef] [PubMed]
- Kiourti, A.; Lee, C.; Volakis, J.L. Fabrication of textile antennas and circuits with 0.1 mm precision. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 151–153. [Google Scholar] [CrossRef]
- Salman, S.; Wang, Z.; Colebeck, E.; Kiourti, A.; Topsakal, E.; Volakis, J.L. Pulmonary edema monitoring sensor with integrated body–area network for remote medical sensing. IEEE Trans. Antennas Propag. 2014, 62, 2787–2794. [Google Scholar] [CrossRef]
- Mishra, V.; Kiourti, A. Wearable electrically small loop antennas for monitoring joint flexion and rotation. IEEE Trans. Antennas Propag. 2020, 68, 134–141. [Google Scholar] [CrossRef]
- Bai, Q.; Langley, R. Wearable EBG antenna bending and crumpling. In Proceedings of the Loughborough Antennas and Propagation Conference, Loughborough, UK, 16–17 November 2009; pp. 201–204. [Google Scholar]
- Bai, Q.; Langley, R. Crumpling of pifa textile antenna. IEEE Trans. Antennas Propag. 2012, 60, 63–70. [Google Scholar] [CrossRef]
- Hu, B.; Gao, G.P.; He, L.L.; Cong, X.D.; Zhao, J.N. Bending and on-arm effects on a wearable antenna for 2.45 ghz body area network. IEEE Antennas Wirel. Propag. Lett. 2015, 15, 378–381. [Google Scholar] [CrossRef]
- Ling, L.; Damodaran, M.; Kheng, R.; Gay, L. Physical modelling for animating cloth motion. In Computer Graphics: Developments in Virtual Environments; Earnshaw, R., Vince, J., Eds.; Academic Press: Cambridge, MA, USA, 1995; pp. 461–474. [Google Scholar]
- Eischen, J.W.; Deng, S.; Clapp, T.G. Finite-element modeling and control of flexible fabric parts. IEEE Comput. Graphics Appl. 1996, 16, 71–80. [Google Scholar] [CrossRef]
- Tan, S.T.; Wong, T.N.; Zhao, Y.F.; Chen, W.J. A constrained finite element method for modeling cloth deformation. The Visual Comput. 1999, 15, 90–99. [Google Scholar] [CrossRef]
- Narain, R.; Samii, A.; O’Brien, J.F. Adaptive anisotropic remeshing for cloth simulation. ACM Trans. Graphics 2012, 31, 1–10. [Google Scholar] [CrossRef]
- Choi, K.J.; Ko, H.S. Research problems in clothing simulation. Comput. Aided Des. 2005, 37, 585–592. [Google Scholar] [CrossRef]
- Feng, W.; Yu, Y.; Kim, B. A deformation transformer for real-time cloth animation. ACM Trans. Graphics 2010, 29, 1–9. [Google Scholar]
- Wang, H.; Ramamoorthi, R.; O’Brien, J.F. Data-driven elastic models for cloth: Modeling and measurement. ACM Trans. Graphics 2011, 20, 1–11. [Google Scholar]
- Tung, T.; Nobuhara, S.; Matsuyama, T. Complete multi-view reconstruction of dynamic scenes from probabilistic fusion of narrow and wide baseline stereo. In Proceedings of the IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–02 October 2009; pp. 1709–1716. [Google Scholar]
- Bradley, D.; Popa, T.; Sheffer, A.; Heidrich, W.; Boubekeur, T. Markerless garment capture. ACM Trans. Graphics 2008, 27, 1–9. [Google Scholar] [CrossRef]
- Starck, J.; Hilton, A. Surface capture for performance-based animation. IEEE Comput. Graphics Appl. 2007, 27, 21–31. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vlasic, D.; Baran, I.; Matusik, W.; Popovic, J. Articulated mesh animation from multi-view silhouettes. ACM Trans. Graphics 2008, 27, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A comparison and evaluation of multi-view stereo reconstruction algorithms. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, NY, USA, 17–22 June 2006; pp. 519–528. [Google Scholar]
- Gioberto, G.; Dunne, L.E. Garment positioning and drift in garment-integrated wearable sensing. In Proceedings of the 16th International Symposium on Wearable Computers, Newcastle, UK, 18–22 June 2012; pp. 64–71. [Google Scholar]
- Miguel, E.; Bradley, D.; Thomaszewski, B.; Bickel, B.; Matusik, W.; Otaduy, M.A.; Marschner, S. Data-driven estimation of cloth simulation models. Comput. Graphics Forum 2012, 31, 519–528. [Google Scholar] [CrossRef]
- Mishra, V.; Kiourti, A. Wrap-around wearable coils for seamless monitoring of joint flexion. IEEE Trans. Biomed. Eng. 2019, 66, 2753–2760. [Google Scholar] [CrossRef] [PubMed]
- ImageJ, Open-Source Image Processing Software. Available online: imagej.nih.gov/ij/ (accessed on 29 May 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Low Complexity | Low Cost | Accurate 1 | Generalizable | Low Computational Cost and Time |
|---|---|---|---|---|---|
| Simulations [21] | No(-) | No(-) | No (-) | No(-) | No(-) |
| Data Driven Models [22,23] | No(-) | No(-) | Yes(+) | No(-) | No(-) |
| 3D Video/Imaging [24,25,26,27,28,29] | No(-) | No(-) | Yes(+) | Yes(+) | No(-) |
| Proposed Method | Yes(+) | Yes(+) | Yes(+) | Yes(+) | Yes(+) |
| Markers | Loose Sleeve | Tight Sleeve | Stretchy Sleeve | |||
|---|---|---|---|---|---|---|
| Average X Displacement | Average Y Displacement | Average X Displacement | Average Y Displacement | Average X Displacement | Average Y Displacement | |
| West | −1.6 ± 0.3 cm | −3.6 ± 1.0 cm | −3.9 ± 0.1 cm | −1.5 ± 0.2 cm | −2.3 ± 0.1 cm | 0.5 ± 0.2 cm |
| North | −1.8 ± 0.1 cm | −1.3 ± 0.6 cm | −3.5 ± 0.1 cm | −2.6 ± 0.6 cm | −2.0 ± 0.1 cm | −0.1 ± 0.1 cm |
| East | −2.3 ± 0.2 cm | 1.0 ± 0.6 cm | −4.7 ± 0.2 cm | −0.7 ± 0.2 cm | −2.2 ± 0.1 cm | 1.0 ± 0.5 cm |
| Average | −1.9 ± 0.3 cm | −1.3 ± 1.9 cm | −4.0 ± 0.5 cm | −1.6 ± 0.8 cm | −2.1 ± 0.1 cm | 0.5 ± 0.4 cm |
| Markers | Stretchy Sleeve (Lower Elasticity) | Stretchy Sleeve (Higher Elasticity) | ||
|---|---|---|---|---|
| Average X Displacement | Average Y Displacement | Average X Displacement | Average Y Displacement | |
| West | −3.8 ± 0.2 cm | 0.9 ± 0.2 cm | −2.3 ± 0.1 cm | 0.5 ± 0.2 cm |
| North | −3.8 ± 0.3 cm | −1.0 ± 0.1 cm | −2.0 ± 0.1 cm | −0.1 ± 0.1 cm |
| East | −3.6 ± 0.3 cm | −0.4 ± 0.2 cm | −2.2 ± 0.1 cm | 1.0 ± 0.5 cm |
| Average | −3.7 ± 0.1 cm | −0.2 ± 1.0 cm | −2.1 ± 0.1 cm | 0.5 ± 0.4 cm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ketola, R.; Mishra, V.; Kiourti, A. Modeling Fabric Movement for Future E-Textile Sensors. Sensors 2020, 20, 3735. https://doi.org/10.3390/s20133735
Ketola R, Mishra V, Kiourti A. Modeling Fabric Movement for Future E-Textile Sensors. Sensors. 2020; 20(13):3735. https://doi.org/10.3390/s20133735
Chicago/Turabian StyleKetola, Roope, Vigyanshu Mishra, and Asimina Kiourti. 2020. "Modeling Fabric Movement for Future E-Textile Sensors" Sensors 20, no. 13: 3735. https://doi.org/10.3390/s20133735
APA StyleKetola, R., Mishra, V., & Kiourti, A. (2020). Modeling Fabric Movement for Future E-Textile Sensors. Sensors, 20(13), 3735. https://doi.org/10.3390/s20133735