LSTM-Based VAE-GAN for Time-Series Anomaly Detection

Abstract
:1. Introduction
- A novel anomaly detection method based on VAE-GAN is proposed to detect anomalies in times series data from sensors.
- Our method jointly trains the encoder, the generator and the discriminator, which takes advantage of the mapping ability of the encoder and the discrimination ability of the discriminator simultaneously.
- The anomaly score consists of the reconstruction difference of the VAE part and the discrimination results of the discriminator, which makes it more able to distinguish anomalies from normal data.
2. Materials and Methods
2.1. Time Series
2.2. LSTM-Based VAE-GAN
2.3. Anomaly Score
2.4. Anomaly Detection Algorithm
| Algorithm 1. Anomaly detection algorithm used the LSTM-based VAE-GAN |
| Input: training data , testing data |
| Output: anomaly or no anomaly |
| At training model stage: |
| Initialize Enc, Gen, Dis |
| In each iteration: |
| Generate random mini-batch from training data |
| Generate from encoder |
| Generate from generator |
| Sample from prior |
| Generate from generator |
| Update parameters of encoder according to gradient |
| Update parameters of generator according to gradient |
| Update parameters of discriminator according to gradient |
| At anomaly detection stage: |
| Calculate reconstruction difference: |
| Calculate discrimination results: |
| Calculate anomaly score: |
| Calculate average anomaly score for each point of time series corresponding to the testing data |
| if (score > threshold): |
| return anomaly |
| else: |
| return no anomaly |
3. Results
3.1. Comparision with Other Reconstruction Models in F1 Score
- LSTM-AE: An anomaly detection method using an LSTM-based autoencoder [28].
- LSTM-VAE: A anomaly detector using a variational autoencoder. Unlike an AE, a VAE models the underlying probability distribution of observations using variational inference. The LSTM networks are used as the encoder and decoder [23].
- MAD-GAN: An anomaly detection method based on Generative Adversarial Networks which uses the LSTM networks as the generator and the discriminator [29].
3.2. Time Spent in the Anomaly Detection Stage
3.3. The Impact of Latent Space’s Dimensions
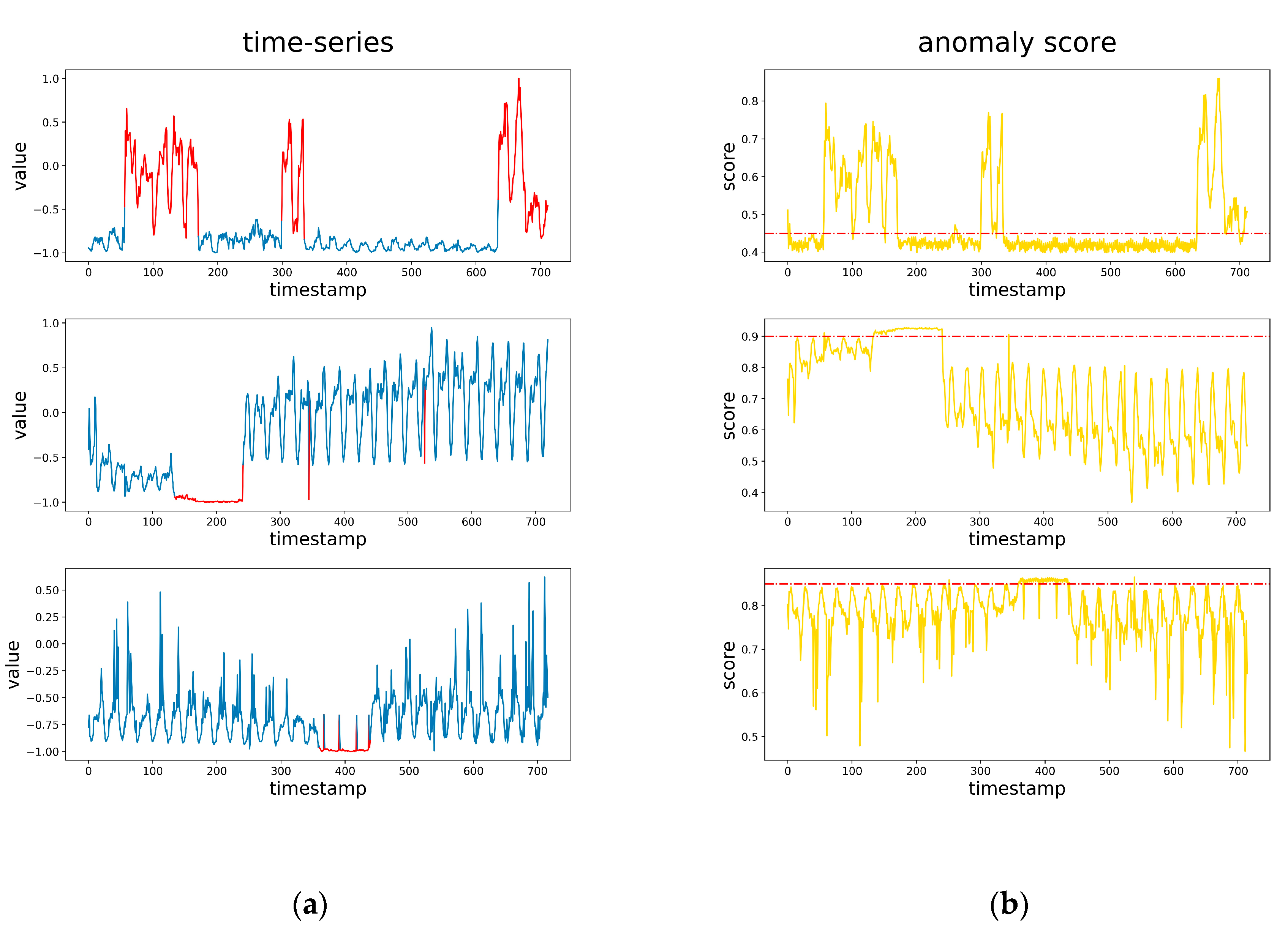
3.4. Visual Analysis
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Da Xu, L.; He, W.; Li, S. Internet of things in industries: A survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar]
- Marjani, M.; Nasaruddin, F.; Gani, A.; Karim, A.; Hashem, I.A.T.; Siddiqa, A.; Yaqoob, I. Big IoT data analytics: Architecture, opportunities, and open research challenges. IEEE Access 2017, 5, 5247–5261. [Google Scholar]
- Martí, L.; Sanchez-Pi, N.; Molina, J.M.; Garcia, A.C.B. Anomaly detection based on sensor data in petroleum industry applications. Sensors 2015, 15, 2774–2797. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly detection: A survey. Acm J. 2009, 41, 1–58. [Google Scholar] [CrossRef]
- Gupta, M.; Gao, J.; Aggarwal, C.C.; Han, J.; Engineering, D. Outlier detection for temporal data: A survey. IEEE Trans. Knowl. Data Eng. 2014, 26, 2250–2267. [Google Scholar] [CrossRef]
- Pham, D.-S.; Venkatesh, S.; Lazarescu, M.; Budhaditya, S.J.D.M.; Discovery, K. Anomaly detection in large-scale data stream networks. Data Min. Knowl. Discov. 2014, 28, 145–189. [Google Scholar] [CrossRef] [Green Version]
- Aggarwal, C.C.; Subbian, K. Event detection in social streams. In Proceedings of the 2012 SIAM International Conference on Data Mining, Anaheim, CA, USA, 26–28 April 2012; pp. 624–635. [Google Scholar]
- Aggarwal, C.C.; Yu, P.S. Outlier detection for high dimensional data. In Proceedings of the 2001 ACM SIGMOD International Conference on Management of Data, Santa Barbara, CA, USA, May 2001; pp. 37–46. [Google Scholar]
- Aggarwal, C.C.; Yu, P.S. Outlier detection with uncertain data. In Proceedings of the 2008 SIAM International Conference on Data Mining, Atlanta, GA, USA, 24–26 April 2008; pp. 483–493. [Google Scholar]
- Aggarwal, C.C. On abnormality detection in spuriously populated data streams. In Proceedings of the 2005 Siam International Conference on Data Mining, Newport Beach, CA, USA, 21–23 April 2005; pp. 80–91. [Google Scholar]
- Aggarwal, C.C.; Zhao, Y.; Philip, S.Y. Outlier detection in graph streams. In Proceedings of the 2011 IEEE 27th International Conference on Data Engineering, Hannover, Germany, 11–16 April 2011; pp. 399–409. [Google Scholar]
- Gao, J.; Liang, F.; Fan, W.; Wang, C.; Sun, Y.; Han, J. On community outliers and their efficient detection in information networks. In Proceedings of the 16th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Washington, DC, USA, July 2010; pp. 813–822. [Google Scholar] [CrossRef] [Green Version]
- Chalapathy, R.; Chawla, S. Deep learning for anomaly detection: A survey. arXiv 2019, arXiv:1901.03407. [Google Scholar]
- Pincus, R.J.B.J.; Barnett, V.; Lewis, T. Outliers in Statistical Data; J. Wiley & Sons: Hoboken, NJ, USA, 1994; pp. 199–256. [Google Scholar]
- Contreras, J.; Espinola, R.; Nogales, F.J.; Conejo, A.J. ARIMA models to predict next-day electricity prices. IEEE Trans. Power Syst. 2003, 18, 1014–1020. [Google Scholar] [CrossRef]
- Rousseeuw, P.J.; Leroy, A.M. Robust Regression and Outlier Detection; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Qin, Y.; Song, D.; Chen, H.; Cheng, W.; Jiang, G.; Cottrell, G. A dual-stage attention-based recurrent neural network for time series prediction. In Proceedings of the 26th International Joint Conference on Artificial Intelligence, Melbourne, Australia, 19–25 August 2017; pp. 2627–2633. [Google Scholar]
- Wu, X.; Shi, B.; Dong, Y.; Huang, C.; Faust, L.; Chawla, N.V. RESTFul: Resolution-Aware Forecasting of Behavioral Time Series Data. In Proceedings of the Conference on Information and Knowledge Management, Torino, Italy, 22–26 October 2018; pp. 1073–1082. [Google Scholar]
- Bontemps, L.; McDermott, J.; Le-Khac, N.-A. Collective anomaly detection based on long short-term memory recurrent neural networks. In Proceedings of the International Conference on Future Data and Security Engineering, Can Tho City, Vietnam, 23–25 November 2016; pp. 141–152. [Google Scholar]
- Hundman, K.; Constantinou, V.; Laporte, C.; Colwell, I.; Soderstrom, T. Detecting spacecraft anomalies using lstms and nonparametric dynamic thresholding. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, August 2018; pp. 387–395. [Google Scholar] [CrossRef] [Green Version]
- Chauhan, S.; Vig, L. Anomaly detection in ECG time signals via deep long short-term memory networks. In Proceedings of the 2015 IEEE International Conference on Data Science and Advanced Analytics (DSAA), Paris, France, 19–21 October 2015; pp. 1–7. [Google Scholar]
- Malhotra, P.; Vig, L.; Shroff, G.; Agarwal, P. Long short term memory networks for anomaly detection in time series. In Proceedings of the 23rd European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, 22–24 April 2015; pp. 89–94. [Google Scholar]
- Park, D.; Hoshi, Y.; Kemp, C.C. A multimodal anomaly detector for robot-assisted feeding using an lstm-based variational autoencoder. IEEE Robot. Autom. Lett. 2018, 3, 1544–1551. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Song, D.; Chen, Y.; Feng, X.; Lumezanu, C.; Cheng, W.; Ni, J.; Zong, B.; Chen, H.; Chawla, N.V. A deep neural network for unsupervised anomaly detection and diagnosis in multivariate time series data. In Proceedings of the AAAI Conference on Artificial Intelligence, Palo Alto, CA, USA, 27 January–1 February 2019; pp. 1409–1416. [Google Scholar]
- Zong, B.; Song, Q.; Min, M.R.; Cheng, W.; Lumezanu, C.; Cho, D.; Chen, H. Deep autoencoding gaussian mixture model for unsupervised anomaly detection. In Proceedings of the 6th International Conference on Learning Representations, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Guo, Y.; Liao, W.; Wang, Q.; Yu, L.; Ji, T.; Li, P. Multidimensional time series anomaly detection: A gru-based gaussian mixture variational autoencoder approach. In Proceedings of the Asian Conference on Machine Learning, Bejing, China, 14–16 November 2018; pp. 97–112. [Google Scholar]
- Chen, R.-Q.; Shi, G.-H.; Zhao, W.-L.; Liang, C.-H. Sequential VAE-LSTM for Anomaly Detection on Time Series. arXiv 2019, arXiv:1910.03818. [Google Scholar]
- Malhotra, P.; Ramakrishnan, A.; Anand, G.; Vig, L.; Agarwal, P.; Shroff, G. LSTM-based encoder-decoder for multi-sensor anomaly detection. arXiv 2016, arXiv:1607.00148. [Google Scholar]
- Li, D.; Chen, D.; Goh, J.; Ng, S.-K. MAD-GAN: Multivariate Anomaly Detection for Time Series Data with Generative Adversarial Networks. In Proceedings of the 28th International Conference on Artificial Neural Networks, Munich, Germany, 17–19 September 2019; pp. 703–716. [Google Scholar]
- Goodfellow, I. NIPS 2016 tutorial: Generative adversarial networks. arXiv 2016, arXiv:1701.00160. [Google Scholar]
- Kingma, D.P.; Welling, M. Auto-encoding variational bayes. In Proceedings of the 2nd International Conference on Learning Representations, Banff, AB, Canada, 14–16 April 2014. [Google Scholar]
- Rezende, D.J.; Mohamed, S.; Wierstra, D. Stochastic backpropagation and approximate inference in deep generative models. In Proceedings of the 31st International Conference on Machine Learning, Beijing, China, 21–26 June 2014; pp. 3057–3070. [Google Scholar]
- Goodfellow, I. On distinguishability criteria for estimating generative models. In Proceedings of the 3rd International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Larsen, A.B.L.; Sønderby, S.K.; Larochelle, H.; Winther, O. Autoencoding beyond pixels using a learned similarity metric. In Proceedings of the 33rd International Conference on Machine Learning, New York, NY, USA, 19–24 June 2016; pp. 2341–2349. [Google Scholar]
- Yahoo Webscope Dataset S5-A Labeled Anomaly Detection Dataset. Available online: https://webscope.sandbox.yahoo.com/catalog.php?datatype=s&did=70 (accessed on 8 December 2019).
- AIOps Challenge. Available online: http://iops.ai/competition_detail/?competition_id=5&flag=1 (accessed on 4 June 2020).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Method | Precision | Recall | F1 |
|---|---|---|---|---|
| Yahoo | LSTM-AE | 0.4353 | 0.848 | 0.5753 |
| LSTM-VAE | 0.8464 | 0.8516 | 0.849 | |
| MAD-GAN | 0.6007 | 0.8509 | 0.7042 | |
| LSTM-based VAE-GAN | 0.8752 | 0.9067 | 0.8907 | |
| KPI | LSTM-AE | 0.9474 | 0.4737 | 0.6316 |
| LSTM-VAE | 0.76 | 0.5 | 0.6032 | |
| MAD-GAN | 0.9444 | 0.4474 | 0.6071 | |
| LSTM-based VAE-GAN | 0.95 | 0.5 | 0.6552 |
| Method | Latent Dim | Precision | Recall | F1 |
|---|---|---|---|---|
| LSTM-AE | 5 | 0.6095 | 0.7171 | 0.6589 |
| 10 | 0.4353 | 0.848 | 0.5753 | |
| 15 | 0.4861 | 0.855 | 0.6198 | |
| LSTM-VAE | 5 | 0.7513 | 0.872 | 0.8072 |
| 10 | 0.8464 | 0.8516 | 0.849 | |
| 15 | 0.8281 | 0.8822 | 0.8543 | |
| MAD-GAN | 5 | 0.6071 | 0.8434 | 0.706 |
| 10 | 0.6007 | 0.8509 | 0.7042 | |
| 15 | 0.795 | 0.887 | 0.8385 | |
| LSTM-based VAE-GAN | 5 | 0.9 | 0.8577 | 0.8784 |
| 10 | 0.8752 | 0.9067 | 0.8907 | |
| 15 | 0.8698 | 0.9054 | 0.8873 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, Z.; Yu, K.; Wu, X. LSTM-Based VAE-GAN for Time-Series Anomaly Detection. Sensors 2020, 20, 3738. https://doi.org/10.3390/s20133738
Niu Z, Yu K, Wu X. LSTM-Based VAE-GAN for Time-Series Anomaly Detection. Sensors. 2020; 20(13):3738. https://doi.org/10.3390/s20133738
Chicago/Turabian StyleNiu, Zijian, Ke Yu, and Xiaofei Wu. 2020. "LSTM-Based VAE-GAN for Time-Series Anomaly Detection" Sensors 20, no. 13: 3738. https://doi.org/10.3390/s20133738
APA StyleNiu, Z., Yu, K., & Wu, X. (2020). LSTM-Based VAE-GAN for Time-Series Anomaly Detection. Sensors, 20(13), 3738. https://doi.org/10.3390/s20133738