1. Introduction
Pipelines are naturally vulnerable to operational, environmental and man-made effects; there are many factors that could increase the vulnerability of pipelines: the mechanical deformation and ground movements caused by seismological effects; the leaks from neglect, vandalism or terrorism and the potential damages related to nearby excavations or illegal intrusions [
1]. Pipeline monitoring and control actions are aimed at identifying and locating possible incipient or advanced failures, which are of enormous interest in the transport of hydrocarbons, but remain complex in application.
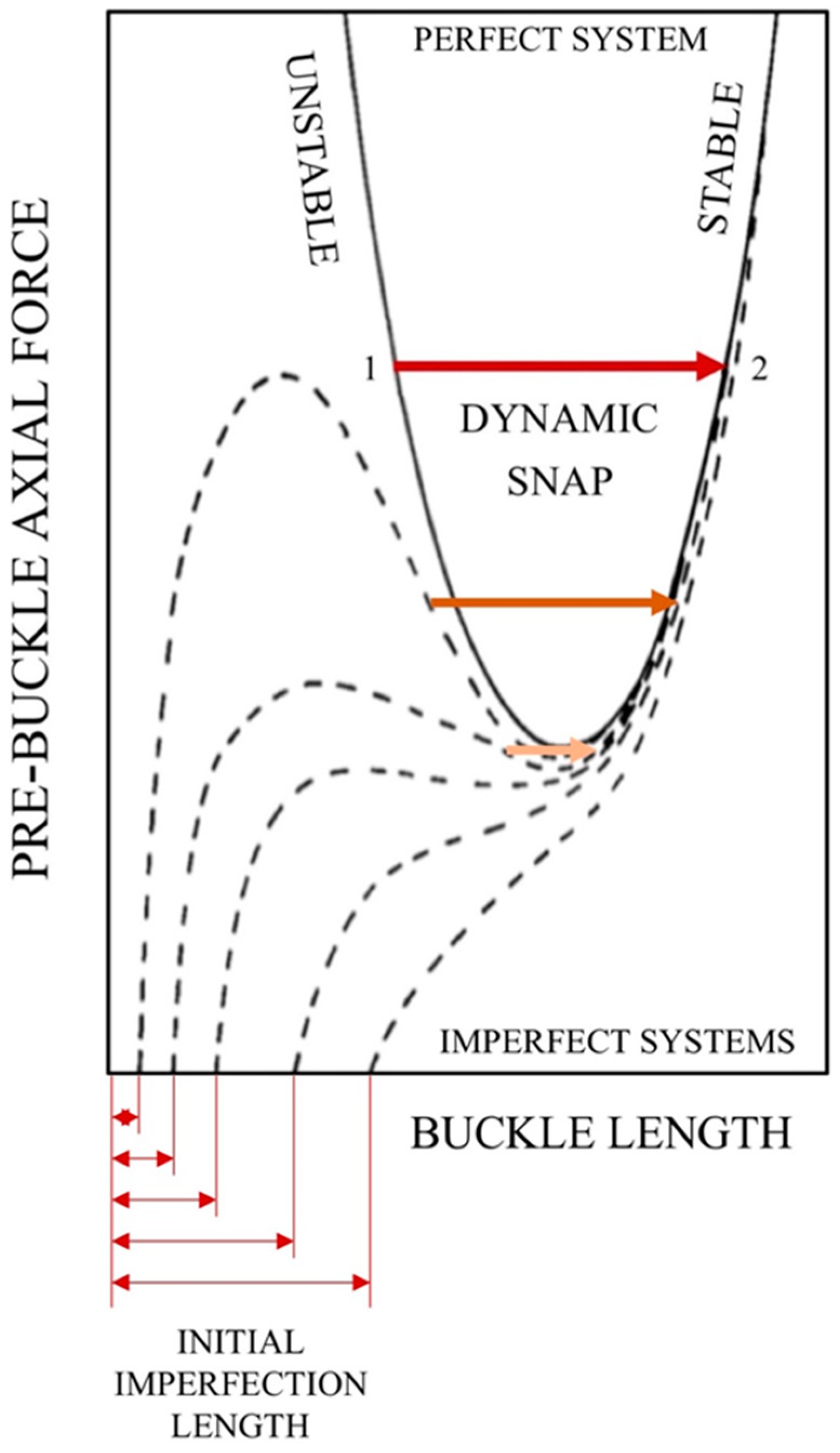
Buckling occurs in the presence of initial imperfections, which is typical in pipelines, particularly in submarine lines [
2,
3,
4,
5,
6]. The loads commonly induced in pipelines are caused by the frictional restraint of axial extension due to temperature changes or internal pressure. Buckling can occur according to two different modes: the first involves an upward movement, the second provides snaking lateral movements. The lateral mode occurs at a lower axial load than the vertical one. Typical overall buckling occurs when the pipeline is located in trenches: initially, lateral constraints cause the pipeline to buckle upward and out of the trench; the second phase consists of the lateral and/or rolling movement of the part outside the trench [
2].
In such a scenario, we focus on the application of optical fiber Bragg grating (FBG) sensors for the measurement of strain and bending along pipelines. Strain can be monitored by a series of FBG sensors installed on the outside of pipelines at discrete locations in the areas exposed to geohazard risks, such as landslides, earthquakes or settlements [
1]. Particularly, we deal with the analysis of the theoretical background and laboratory experiments to check the reliability of the performance of this technology.
The popularity of optical fibers in real-time structural health monitoring has widely increased in the last decade. Both field applications and laboratory analysis have been widely conducted. Optical fiber sensors such as locally high-precision FBG and distributed Brillouin scattering time domain reflectometry (BOTDR) sensors are becoming very popular in many engineering applications because of their advantages with respect to conventional technologies, not only for their lower sensitivity to electromagnetic noise, but also as far as the accuracy, the durability and the sensing distance are concerned. The Bragg wavelength and the Brillouin frequency methods are suitable for measuring strain and temperature, as widely reported in the literature on the topic [
7,
8,
9]. Experiments to monitor steel pipe and column buckling have been performed using a distributed Brillouin sensor system [
10], to detect simultaneously both tension and compression: this suggests Brillouin sensors as a good tool for structural health monitoring. A combination of fiber Bragg and long-period gratings has been used to simultaneously measure strain and temperature with resolutions of ±9 με and ±1.5 °C over the ranges 290–1270 με and 25–50 °C [
11]. Interferometric sensors such as Fabry–Perot are less amenable to multiplexing and forming a sensing network than FBGs [
11]. So far, no relevant applications have been reported in the field of pipeline upheaval-buckling detection. In the oil and gas industry, the combination of FBG and BOTDR sensing technologies allows real-time monitoring and early warning systems; this approach is adopted to monitor the strain/stress state and safety of casing pipes in oil well operations [
12]. The integration of these two monitoring systems could partially overcome the intrinsic weakness of each single technology, as FBGs are suitable for giving local information, meanwhile BOTDR is characterized by a series of limits such as poor spatial resolution, low test accuracy and low sampling frequency. The high cost of BOTDR systems for strain and temperature measurements is still a limit to the widespread use of FBG and BOTDR combinations for the real-time monitoring of pipelines. On the other hand, many studies about FBG sensors have mostly focused on the pipeline damage detection and leakage monitoring; only few studies deal with corrosion monitoring: in such a scenario, FBG hoop strain sensors look like a promising technology for monitoring pipeline corrosion and leakage [
8].
We focus on the theoretical analysis of pipeline buckling and investigate the reliability of FBG monitoring both by examining the analytical model available and by performing a laboratory-scale experiment. The goal is to verify the extendibility (with appropriate adaptations and adjustments) of models and methods developed for the detection of pipeline upheaval buckling caused by externally imposed forces using Brillouin sensors to the case of Bragg gratings and service loads, in particular temperature. Although this factor is doubly important in view of its potentially disruptive effects on both pipelines (buckling) and FBGs (apparent thermal strain), it has not been yet fully investigated.
3. Results
The results are here presented by introducing the findings of the experimental activity, followed by the analysis of data modeling.
3.1. Experimental
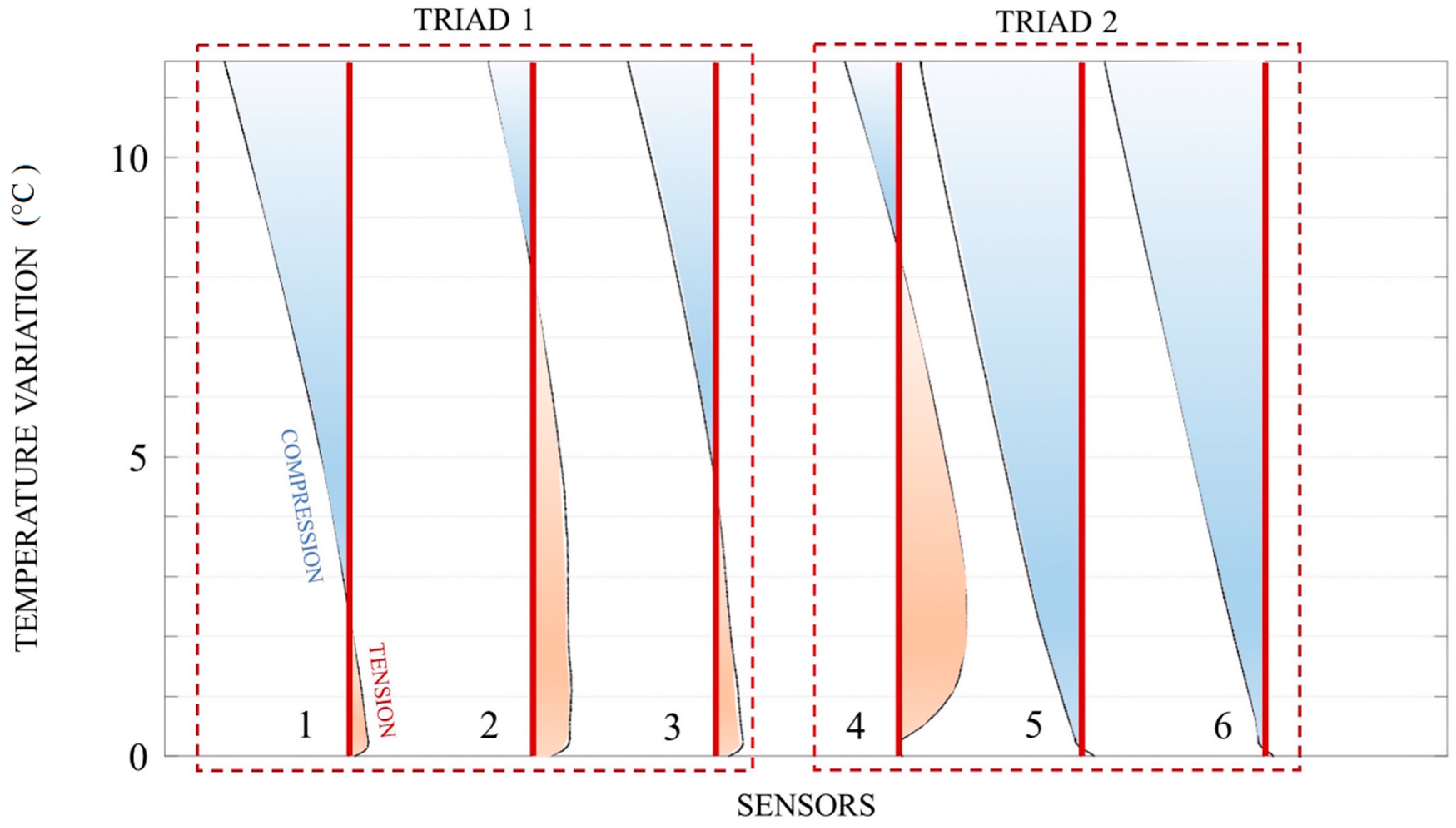
As shown by the graph of the temperature rise vs. longitudinal strain (
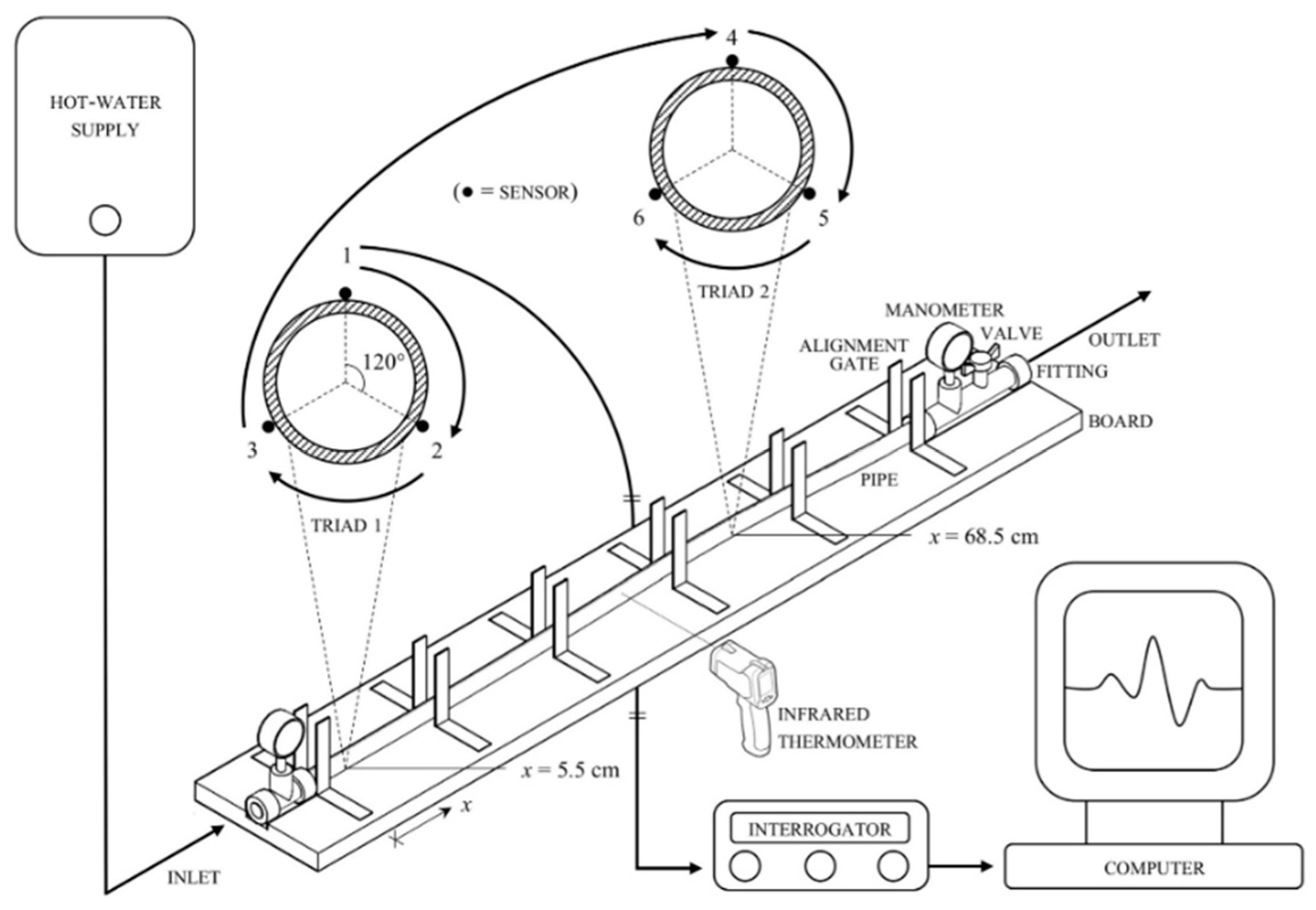
Figure 5), Triad 1 (sensors 1–3) registered an increment in tension (positive, highlighted in red), whereas Triad 2 recorded concurrent expansion in the upper portion of the tube (sensor 4) and contraction (negative, highlighted in blue) in the lower one (sensors 5–6), which means that the pipe bent, even if bending is not sufficient to deduce buckling, as explained in the next paragraph.
To facilitate their reading, data are presented as “wiggle traces” (i.e., lines oscillating about a null point: a common method of displaying seismic information, for instance). The traces ultimately become uninterpretable parallel lines on account of temperature compensation (
Section 2.2), carried out by subtracting from the measured longitudinal strain the apparent thermal one, defined as:
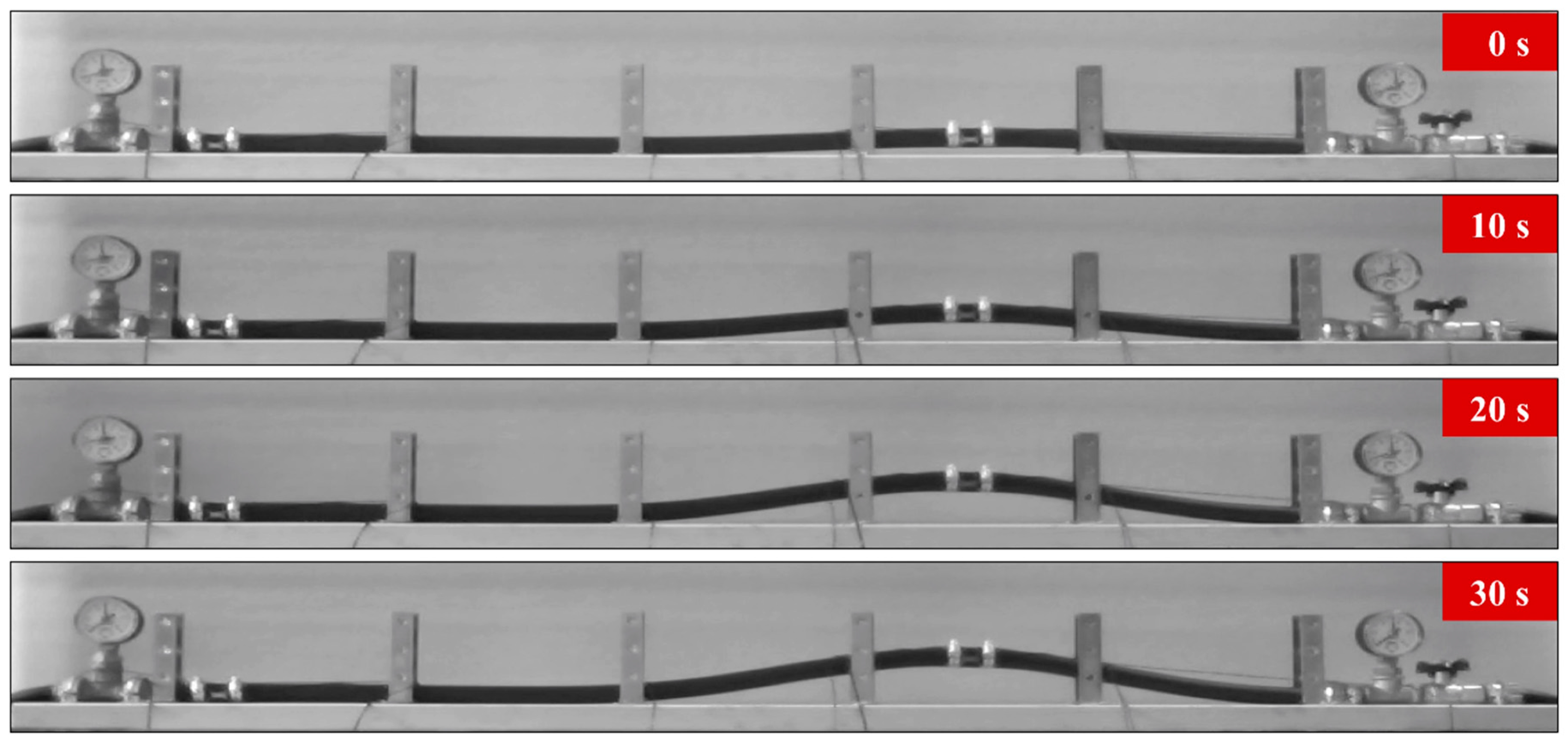
where α denotes the thermal coefficients of the tube (H) and the fiber (F), S the fiber sensitivities to temperature (T) and strain (ε) and ΔT the temperature rise. During the experiment (lasting 30 s), temperature measurements were performed every 10 s; the following temperatures were recorded: at the beginning, 23.8 °C (room temperature); then 25.6 and 31.4 °C, and finally 35.4 °C at the end of the experiment. Temperature data were acquired with an accuracy of 0.1 °C. We interpolated the intermediate values using a polynomial of the third grade.
Figure 5 refers to the experimental results, produced by converting the acquired wavelength shift to the longitudinal strain and purging the latter of the apparent thermal strain. The basic structural-sensing equation for FBG strain gages was applied:
where Δε
m is the stress-related strain (exclusively mechanical), S
ε the strain sensitivity, Δλ
B/λ
B the normalized Bragg-wavelength shift and Δε
T the apparent thermal strain. Step-by-step derivation of Equation (12) is given
Appendix A.
Sensors 1–3 show different values of tension because a small upward concavity formed at the inlet (
Figure 5), therefore the lower portion of the tube (sensors 2–3) stretched more than the upper one (sensor 1).
We got compression as the temperature change increased because the apparent thermal strain, enhanced by the relatively high thermal coefficient of the pipe material, far exceeded and in the end completely “masked” the mechanical one. As the experiment confirmed, the apparent thermal strain is the principal disadvantage of FBG sensors.
3.2. Modeling
Since its axial rigidity is generally several orders of magnitude greater than the flexural one, a thin-walled structure can absorb plenty of axial-strain energy without excessive distortion, whilst it must deform much more to take in an equivalent amount of bending-strain energy. If the strain energy is stored mostly as axial compression, it may be converted to bending during buckling. To bring about this transformation, significant deflections are needed [
19]; as a consequence, the bending behavior is not necessarily indicative of buckling, being observable also in the phase preceding this event, which can nonetheless be unequivocally identified by distinctive trends of axial and bending strains, extracted from the measured longitudinal one:
Condition 1, an increase in tensile strain or, correspondingly, a release of compression (geometric shortening –
Section 2.1) within the bend;
Condition 2, the generation of bending strain in the same tract [
18].
The principle is analogous to that (familiar to all petroleum engineers) underlying the modern well-test analysis, whereby typical patterns of the pressure derivative (plotted vs. time on a bi-logarithmic graph) are individuated to “diagnose” flow regimes or geometries and, on the basis of their chronological sequence, the most suitable well/reservoir/boundary models is selected.
4. Discussion
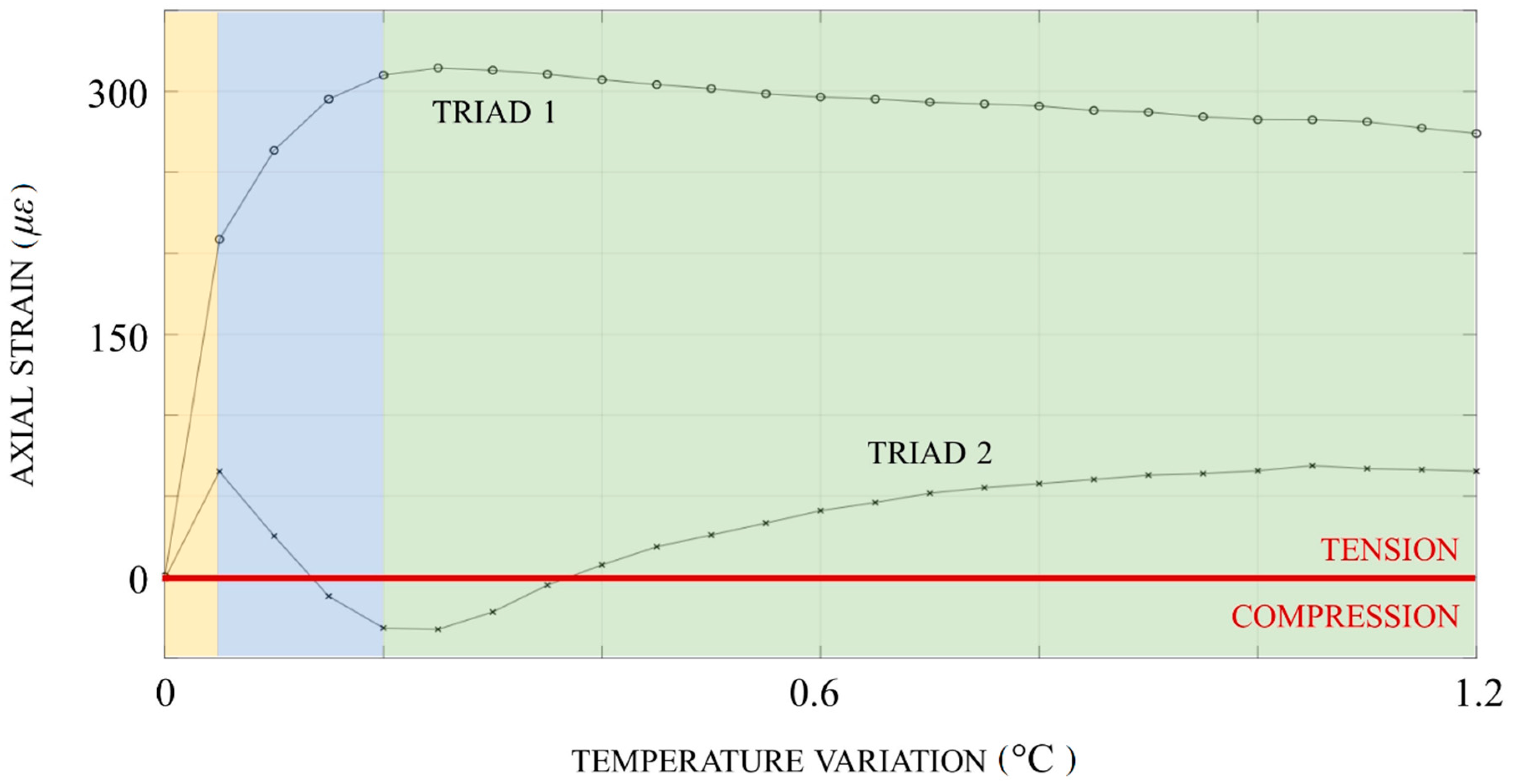
The graph of axial strain vs. temperature rise (
Figure 6) revealed that:
The yellow area, tension (attributable to the instantaneous contact with the hot fluid) was encountered in the inceptive stage;
The blue area, this was gradually counterbalanced by the reaction of the constraint at the outlet, perceived first by Triad 2, undergoing sudden compression;
The green area, compression was subsequently released, a circumstance compatible with geometric shortening (Condition 1 was satisfied).
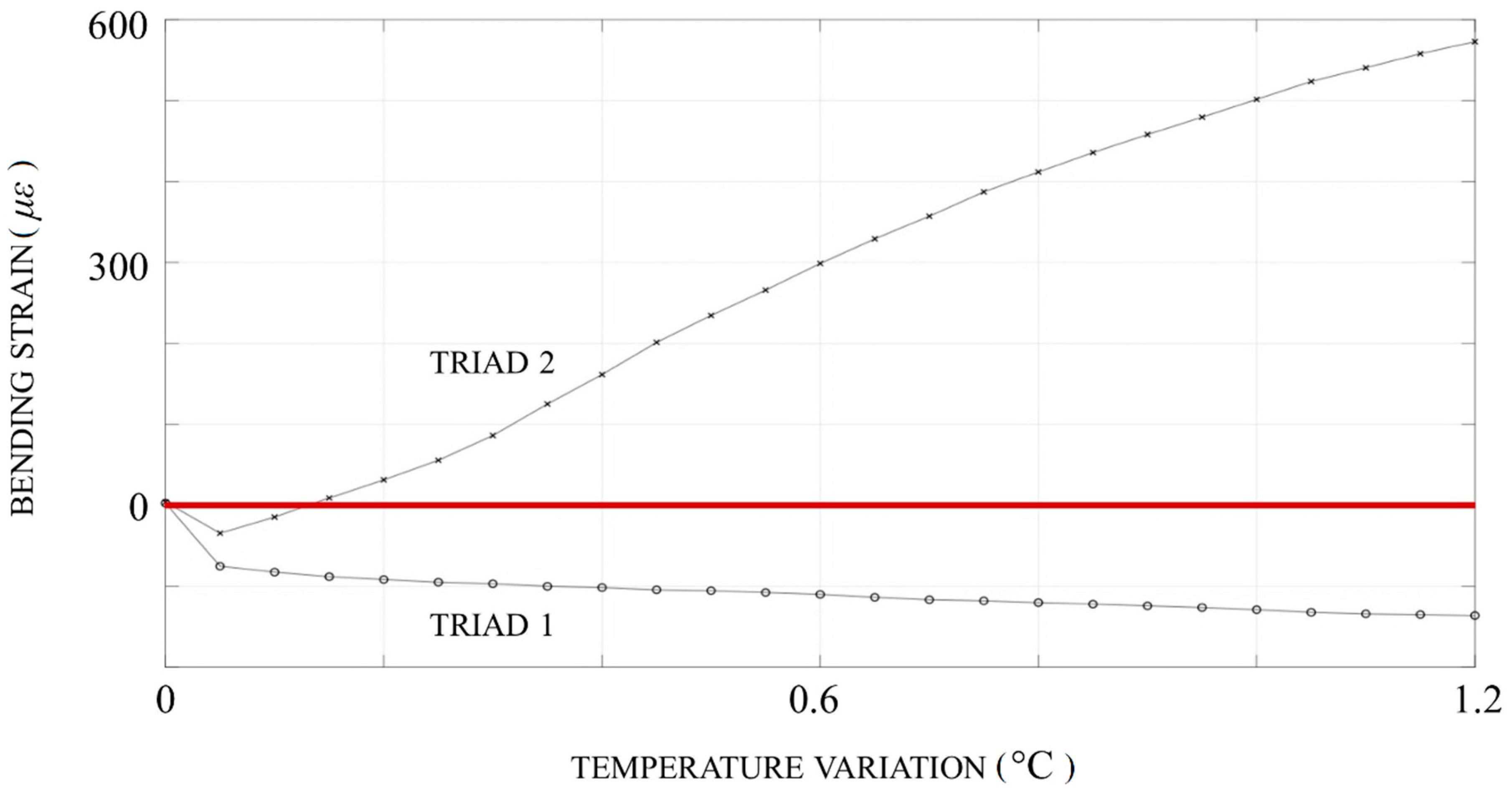
The graph of the bending strain vs. temperature (
Figure 7) evinced the concomitant development of:
A prominent downward concavity (evidenced by a surge in bending strain: Condition 2 was fulfilled too) around the defect;
A much more modest upward concavity (negative) at the inlet, as though the buckle “pushed against” the constraint and vice versa.
In the light of this evidence, we assessed that buckling was successfully detected. The longitudinal strain measured by an FBG sensor equals the inverse of the strain sensitivity times the normalized shift in the Bragg wavelength:
In the case under discussion (given the Bragg-wavelength range, interrogator accuracy and strain sensitivity mentioned in
Section 2.4.2), the estimated uncertainty was less than 0.644–0.653 με; we assumed this to be a negligible quantity when compared with the orders of magnitude involved, reaching hundreds or thousands of microstrains.
Besides its intrinsic merits, such as the functionality and simplicity of design, the accessibility and inexpensiveness of materials, the controllability and repeatability of processes, the approach illustrated herein had some drawbacks worth pointing out:
The low levels of applicable pressure did not permit a thorough evaluation of this factor;
The temperature measurements, taken discontinuously on the external surface of the tube, required mathematical interpolation (
Section 3.1) and were affected by heat dissipation;
The gluing of gages to polyethylene was problematic and they might be prone to slip;
Owing to the limited number of sensors, more relevant quasi-distributed strain measurements were not possible.
Despite the potential sources of inaccuracy just enumerated, the experimental results agree reasonably well with the analytical model and the observed physical phenomena. What emerged with absolute clarity was the severity of “temperature drift”, which remains a major obstacle to fruitful employment of optical sensing technology in this application field; however, innovative interrogation techniques such as that devised by Wu et al. [
20] promise to overcome it.
It is difficult to draw a direct, exact comparison (at least quantitatively) between our results and those reported in the existing literature on the topic: to elucidate this, we shall now briefly review the most pertinent papers.
Ravet et al. [
10] detected buckling in a steel pipe and column for the first time by means of distributed Brillouin fiber-optic sensors (DBFSs). The location of buckling was predetermined by thinning a small area of the specimen inner walls at mid-length. Each specimen was placed on a test bench and compressed stepwise, while deformation was constantly monitored by the sensors.
Feng et al. [
18] worked out a method based on DBFSs for detecting the upheaval buckling of buried subsea pipelines. The model pipe was made of polyvinyl chloride (the preference for PVC over steel was dictated by the small scale of the experiment: the lower the stiffness, the easier it will be to trigger buckling); its initial shape was not straight due to imperfect manufacturing. The bottom of a trough was covered with a layer of compacted sand and a timber prop was put onto it to simulate the unevenness of the seabed. The pipe was accommodated inside the trough and, after the installation of sensors, completely buried. A hydraulic jack applied axial compression to one end of the pipe.
More recently, Feng et al. [
21] combined the Brillouin optical time-domain analysis (BOTDA) with Raman optical time-domain reflectometry (ROTDR) to monitor strain and temperature respectively in a steel gas pipeline running under a busy Chinese road. The distributed temperature measurements enabled compensation for thermal effects and detection of leaks signaled by irregularities in the distribution.
All cited articles deal with distributed Brillouin sensors instead of Bragg-grating rosettes (
Section 2.3) and with materials (steel, PVC) having mechanical properties that are very different from those of polyethylene (
Section 2.4.1). Moreover, they focus on external forces (exerted by a test bench or a hydraulic jack) rather than service loads (e.g., the operating pressure and temperature—
Section 2.5), apart from Feng et al. [
21] where the pipe was subjected to an internal pressure of 16 bar and a temperature gradient of 9 °C. From a qualitative viewpoint, our observations are fairly consistent with those of Feng et al. [
18], especially with regard to buckling “signatures” (
Section 3.2).
Ling et al. [
22] performed a similar study to check monitoring methods and design a circumferential strain measuring device. Their experimental study was conducted on a PVC model pipeline. Their results demonstrated good performance in the circumferential strain measurement, in agreement with our results. According to our encouraging results, a further investigation into FBG strain sensors applied to natural gas pipeline leakage detection will be performed; this is based on detecting negative pressure signals caused by a leakage. A similar approach has been suggested by Quingmin et al. [
23]. They demonstrated that FBG strain sensors, used to monitor the hoop strain of a pipeline and detect negative pressure signals, are less influenced by noise than standard sensors.
5. Conclusions
The laboratory-scale experiment has been useful to check the reliability and drawbacks of FBG sensors for detecting the buckling of pipelines. The upscaling of the findings of the test is still challenging primarily because of the issues related to the low pressure and the temperature effects, which vary discontinuously on the external surface of the tube; this phenomenon depends on heat dissipation and requires some mathematical manipulation for the proper correction of the strain.
The positive aspects of using FBG sensors to monitor pipeline buckling, such as the reliability and repeatability of measurements, are in the real field hugely affected by the thermal issues, which remain a major obstacle to fruitful employment of optical sensing technology in this application field.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}