1. Introduction
Target tracking (TT) refers to the development and utilization of mobility models to determine information about the movement (such as the position, speed, and direction) of a target. This constitutes a fundamental and challenging application of wireless sensor networks (WSNs) [
1,
2,
3]. One of the criteria with which TT algorithms in WSNs can be classified is whether the targets are cooperative with the tracking system. These are referred to as active and passive modes [
4,
5], respectively, and in this paper, we focus on the problem of active TT. Based on the premise that the locations of the nodes in the network are known a priori [
4,
5,
6,
7], existing TT algorithms attempt to achieve localization and estimate the trajectories of targets by interpreting several metrics of the transmissions from the target’s tag, such as received signal strength indication (RSSI) [
8], angle of arrival [
9], time difference of arrival [
10], and time-of-arrival [
11]. Among them, the RSSI-based techniques have been extensively investigated since (a) they are available in most of the commercial wireless devices and (b) they do not need any additional sensors or hardware customization [
8,
12]. RSSI-based TT usually includes three main stages: target detection, target location, and target trajectory prediction [
13,
14,
15]. In active TT, the latter two processes are of primary importance [
16,
17,
18,
19].
The target localization process typically utilizes the radio propagation path-loss model to infer the distance of the target from a node. Usually, this model is applied by assuming that either the channel is a perfect free-space medium, or that extensive channel measurements and modeling are performed in the deployment of the system. However, dynamic outcomes in the environment, such as non-line-of-sight (NLOS), signal attenuation, and multi-path propagation, can affect signal propagation and consequently compound the challenges for target tracking [
15]. Consequently, RSSI-based TT is either not feasible in many practical applications, or can only be achieved through an extensive set of experimental channel measurements [
20]. While some researchers have been working on more robust path-loss models that consider these factors in their features, these models are usually very complex and only applicable to specific environments [
13,
20].
In the trajectory prediction process, Bayesian framework-based filters are the dominant approach [
21]. Classical filters include the Kalman filter (KF) [
14], extended KF (EKF) [
22], unscented KF (UKF) [
23], and particle filter (PF) [
24]. Among them, KF provides an optimal statistical solution in scenarios with linear models and white noise. However, the accuracy and stability are difficult to guarantee in practical applications using KF-based methods. Furthermore, many problems in the real world cannot be represented by linear models. While the EKF, UKF, and other derivatives of KF attempt to address these problems, their adaptability for tracking in the real world still requires further improvement [
25,
26]. On the other hand, while PF can flexibly adapt to the nonlinear dynamic model and multimodal observation model, the particle degradation phenomenon leads to a decline of the tracking accuracy [
25,
27].
The above limitations exhibited by existing methods indicate that precise calculation of the nonlinear mapping relationship between the RSSI and the target position is key for stable and accurate TT results. Nevertheless, despite these shortcomings, KF—due to its smaller computational load and low-storage requirements—is still a popular and efficient recursive method commonly used for RSSI-based TT [
28]. However, the trajectory prediction reliability of KF in nonlinear scenarios constitutes the “bottleneck” in its development in real-world applications, and therefore requires further development.
Recent work has adopted a learning-by-example (LBE) approach [
12,
24,
29,
30] to address the aforementioned problems, in which the relationship between the RSSI value and the distance is a more sophisticated function. LBE systems are usually composed of two phases, in which one incorporates offline training and the other online testing. During the training phase, the features of the signal received at the network nodes are stored concurrently with the known position of the target to build a database of input–output relationships. After training has been conducted using the above database, pattern matching algorithms (e.g., support vector machine (SVM), neural network (NN), and k-nearest neighbor) are then applied in the testing phase to establish the unknown locations of the targets and plot the target trajectory combined with the filtering methods. LBE systems suitably capture the sophisticated relationship between the RSSI behavior and the target position, while avoiding complex path-loss model formulas [
31]. Furthermore, SVM, a classic pattern matching method, has been found to exhibit advantageous features for TT in terms of its ability to solve nonlinear and high-dimensional pattern recognition problems with a small number of samples, avoiding “dimensionality disasters” and “over study” problems [
29].
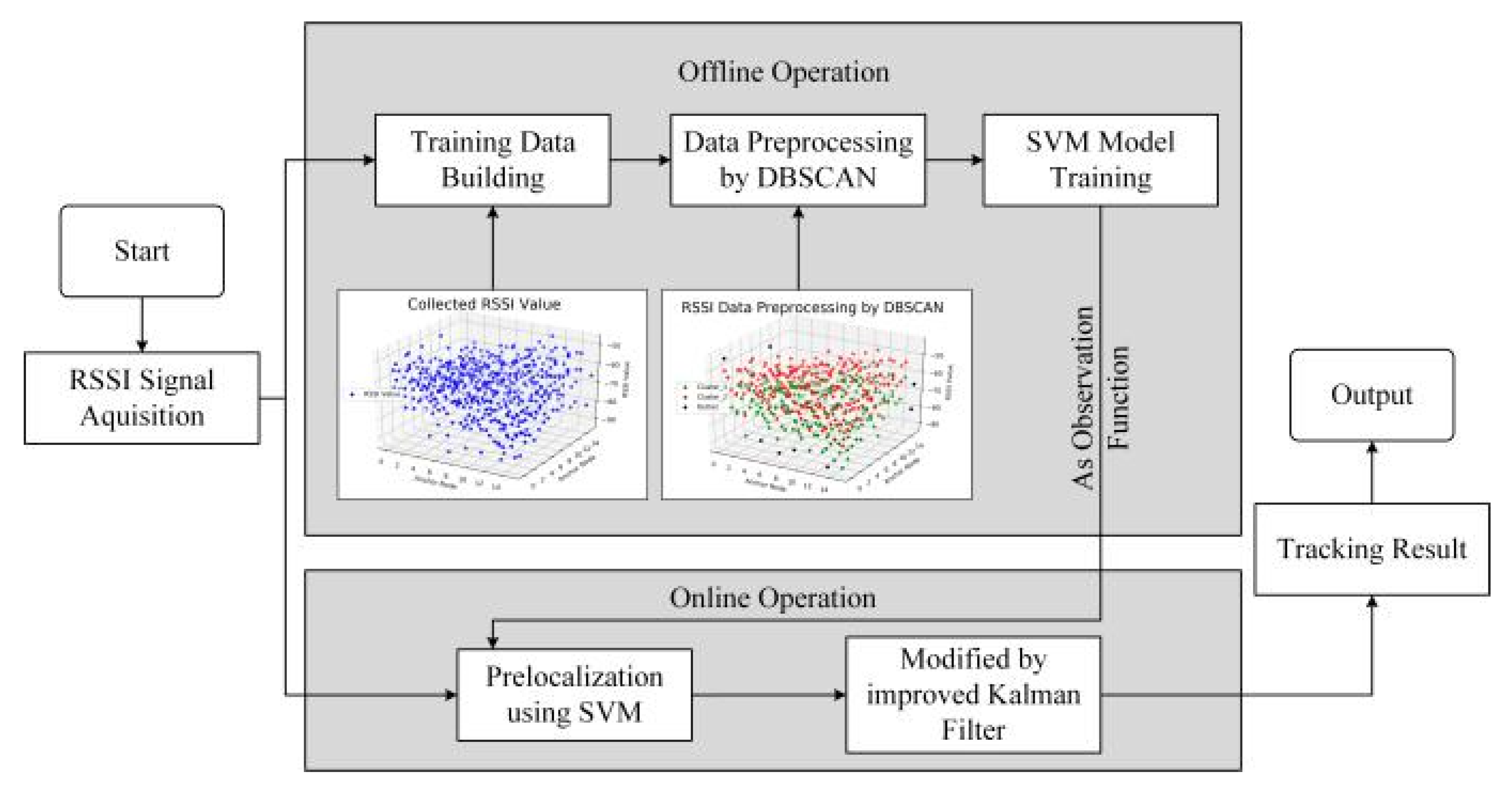
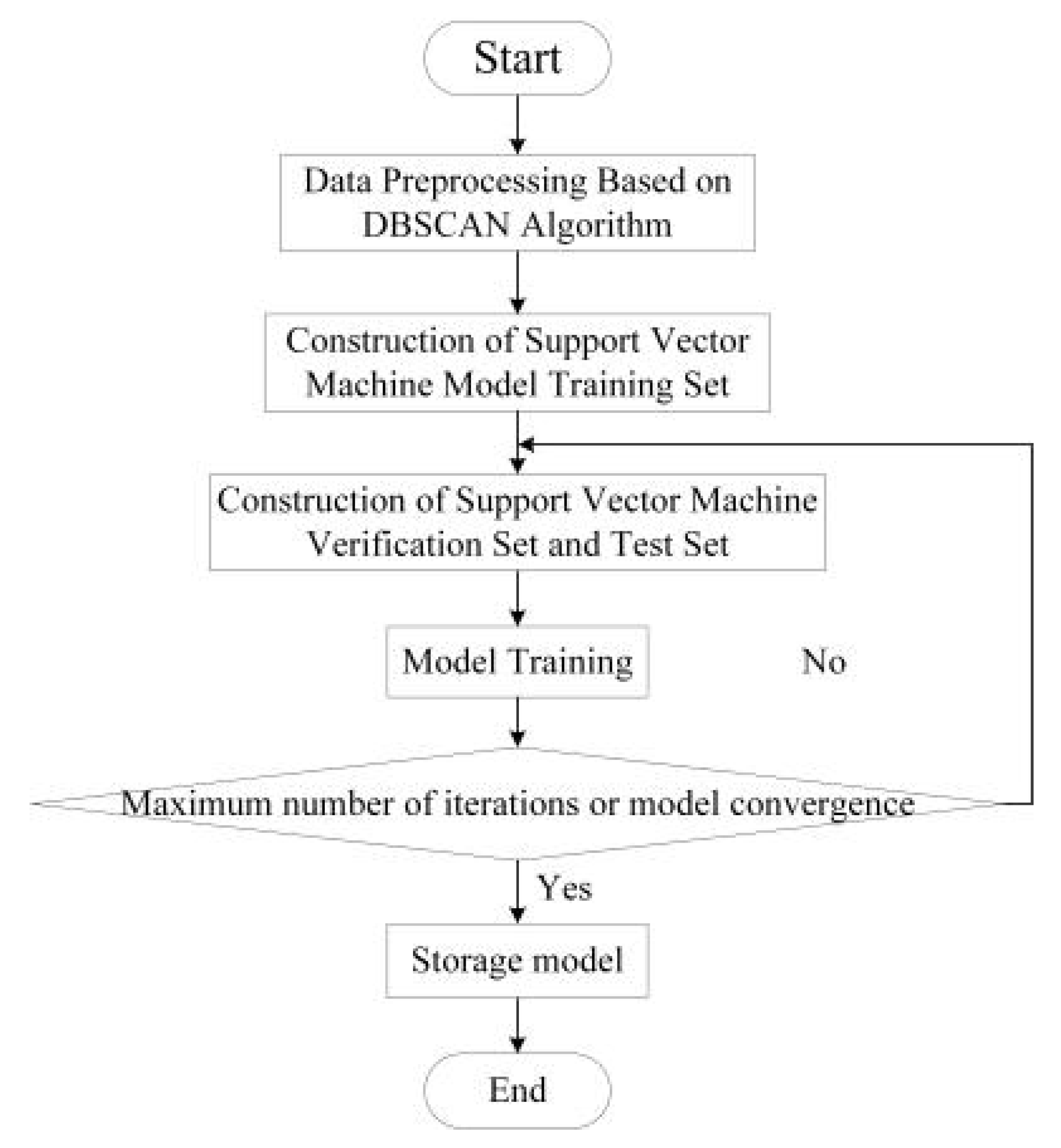
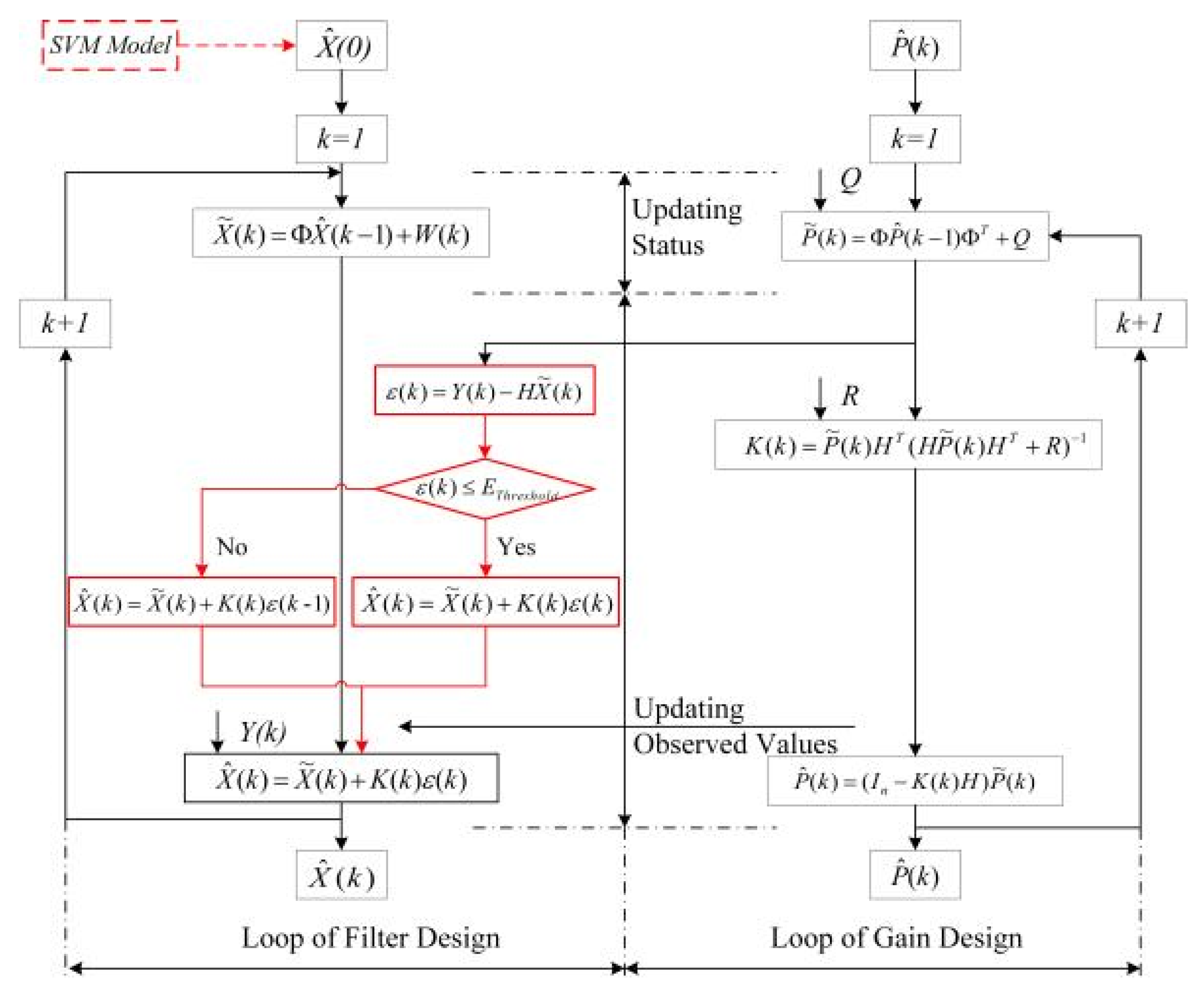
In this study, we build on this recent work to propose an innovative LBE algorithm, known as the SVM+KF algorithm, which improves the stability and accuracy of tracking results. The new algorithm combines the SVM and KF methods, and consists of offline model training and online target tracking phases. In the offline model training phase, the database, preprocessed by density-based spatial clustering of application with noise (DBSCAN), is used with the SVM algorithm to define a kernel-based model, whose input is the RSSI value and output is the corresponding position. In the online tracking phase, a first position estimate is obtained with the use of the already defined SVM model and the measured RSSI values. This estimate is then corrected by an improved KF based on innovation sequence modification to achieve a better tracking performance.
The rest of the study is organized as follows. In
Section 2, we provide a review of related LBE TT algorithms. The details of our proposed methodology are described in
Section 3. Various simulation and experimental results are presented in
Section 4 to study the performance of the proposed algorithm. Finally, the conclusions are summarized in
Section 5.
2. Related Work
Numerous research studies attempting to deal with the dynamic nature of RSSI-based TT have been reported in the WSN literature [
30,
31,
32,
33]. In this section, we restrict our review to studies that are relevant to LBE-based methods, on which our approach is based. LBE methods combine pattern matching algorithms and filtering methods, and we cover these two aspects in our review.
While numerous filtering algorithms have been extensively used in LBE-based TT for WSNs, KF has particularly attracted much attention as a classic filtering algorithm. However, KF is prone to instability. One approach that can be employed to avoid the instability of traditional KF and offer superior tracking performances, proposed by Wang et al. [
32], is to improve the noise model by incorporating both additive noises and multiplicative noises in distance sensing. Furthermore, they use the maximum likelihood estimator for prelocalization of the target and measurement conversion to remove the measurement nonlinearity. These converted measurements and their associated noise statistics are then used in a standard KF for a recursive update of the target state. Although this method is effective and easy to implement, the cost of the system setup and maintenance is high. Chi et al. [
34] used an extreme learning machine (ELM) to improve the estimation accuracy and the robustness of traditional KF for tracking in WSNs. Mahfouz et al. [
20] trained the ridge regression (RR) and the vector-output regularized least-squares algorithms off-line to obtain a first estimation position. In the on-line tracking process, after the RSSIs and instantaneous acceleration of a moving target are measured, a first position estimate is obtained by using the already-defined kernel-based model. This estimate is combined with the acceleration information, by means of a KF, to achieve a better accuracy. Simulation results show that their algorithm can achieve robust tracking results when the acceleration information or the RSSI measures are affected by noise. However, multiple filters and multiple sensors are used to detect and TT, resulting in a high energy consumption. Taking the speed information of the target as a factor is an effective method for improving the accuracy of the tracking result, which is also employed in our method. Similar to these methods, other LBE methods using KF as the filter have also been developed, with differences in the various pattern matching (prelocalization) methods that are employed.
In addition to KF, other relevant filtering algorithms have also been adopted. Ahmadi et al. [
35] used the regression tree algorithm (RT) to estimate the target position using the RSSI, and Bayesian filtering, such as traditional KF, and PF to enhance their results. They found that this combination provided a good tradeoff between accuracy and robustness. However, the implementation of this algorithm in real-time WSN is complex. Jondhale et al. [
36] used the generalized regression neural network (GRNN) to obtain initial location estimates of the target’s motion, which were then modified by KF and UKF respectively to improve the tracking performance. This method has also been applied for TT using Bluetooth and smartphones [
37]. The above implementations have not yet been tested and verified in terms of their performance for variation in the measurement noise. In addition, Shi et al. [
33] proposed a new localization strategy that combined hidden Markov models and EKF to identify sight conditions and mitigate NLOS errors. In their algorithm, HMM parameters are obtained by off-line training, with sight conditions as the hidden state and quantized RSSI measurements as observations. The sight conditions are then identified by an on-line forward-only algorithm. However, this method may be unsuitable for some cases where the target has a clear moving direction rather than random motion. Besides, this method lacks generalization in NLOS scenarios caused by dynamic factors. By combining the estimated sight conditions, the target is located by EKF to achieve the real-time localization. Wang et al. [
38] proposed a polynomial fitting-based adjusted KF (PF-AKF) method in a WSN framework to alleviate the NLOS effect. PF-AKF employs polynomial fitting to accomplish both NLOS identification and distance prediction. It then processes the measurements with adjusted KF (AKF), conducting weighted filters in the case of the NLOS condition. Simulation and experimental results obtained from a real indoor environment demonstrate the superior performance of their method.
In terms of pattern matching algorithms, many have been involved in the above examples, such as RR, GRNN, and ELM. For our method, we utilize SVM, which is a machine learning method based on statistical learning theory that has been extensively used in Bluetooth locations, WiFi locations, and WSNs, because of its numerous advantages in solving issues related to small samples, nonlinearity, and high-dimensional classification and prediction. Other LBE methods have also employed SVM for pattern matching.
Zhao et al. [
29] used SVM to compute a classification boundary for TT, and then used KF to update this classification boundary in each sampling period. In this approach, the sampling points were classified by the updated classification line to calculate the coordinates of the corresponding observation points, which were then used to estimate the positions of the different targets. Simulation results validated the effectiveness and stability of their algorithm in comparison with existing methods. However, this combination of SVM and KF focused more on target classification during tracking. Furthermore, Liu et al. [
39] proposed a distributed PF (DPF) based on the combination of SVM and DPF. However, they employed SVM to estimate the density in order to compress the particles to find the global optimum, and yield a sparse solution, rather than to estimate target coordinates. However, the performance of this method cannot approach the performance of centralized PF. Lam et al. [
40] proposed a novel solution to improve RSSI-based distance estimation for smart object interaction applications in the IoT ecosystem. Their algorithm implements a KF on the edge to deal with noisy RSSI measurements and an optimized SVM on the cloud for distance estimation. Practical experiments verified that their algorithm can improve the performance in terms of the delay and accuracy. Nevertheless, in real-world situations, the targets (smartphones or users) are moving, and the number of packets received is limited. Therefore, the accuracy of this method is mainly affected by the signal receiving rate because a precise distance needs to be computed with a few samples.
While the aforementioned research provides important references and guidance for our work, and some scholars have attempted to address the problems of RSSI-based target positioning, ranging, and tracking by coupling SVM and KF [
29,
39,
40], an LBE method based on combining SVM and KF has not yet been proposed. In contrast with existing methods, we propose the SVM + KF algorithm to improve the stability and accuracy of tracking results and validate the effectiveness and stability of the algorithm via experiments and simulations. Our research aims to provide a useful supplement to RSSI-based TT in WSNs.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}