Estimation of Traffic Stream Density Using Connected Vehicle Data: Linear and Nonlinear Filtering Approaches



Abstract
:1. Introduction
2. Problem Formulation and Estimation Approaches
2.1. State-Space Model
2.2. Estimation Approaches
2.2.1. The PF Approach
- Initialization: ; where t is the time interval.
- (a)
- , R, V, and k,where is the initial vehicle count estimate; R is the measurement’s covariance error; and V is the variance of the initial vehicle count estimate, which is used to randomly generate the initial particles’ locations around .
- (b)
- Generate k particles’ locations randomly, from 1 to K, from the initial prior Gaussian distribution .
- For t = .
- (a)
- Update the locations (), measurements (), and weights () of the particles.where is the observed measurement from the CVs. The weights are then normalized using the following equation, .
- (b)
- Replace the low-weighted particles with new particles (resampling [21]). After a few iterations in the PF process, the weight will focus on a few particles only and most particles will have insignificant weights, resulting in sample degeneracy [41]. The resampling process is therefore used to tackle the degeneracy problem. It should be noted that the highly weighted particles are used to compute the PF posterior estimate.
- (c)
- Compute the PF posterior estimate: The PF posterior estimate is computed as the average value of the remaining particles (particles with high weights), as shown in Equation (9).
- (d)
- Next time step (): When 5 new CVs traverse the link, return to step 2a.
2.2.2. The KF Approach
- Initialization: ; where t is the time interval.
- (a)
- , R, and ,where is the initial posterior error covariance estimate for the state system.
- For t = .
- (a)
- Prior estimates:where is an estimate of a priori vehicle count, is the estimated average travel time, and is the a priori covariance estimate for the state system.
- (b)
- Correction: The correction uses the prior estimate and the new measurement (i.e., the CV average travel time) to compute the Kalman gain (G).
- (c)
- Posterior state estimates:where is the posterior vehicle count estimate, and is the posterior error covariance estimate.
- (d)
- Next time step (): When 5 new CVs traverse the link, return to step 2a.
2.2.3. The AKF Approach
- Initialization: ; where t is the time interval.
- (a)
- , , and ,where is the mean of the noise for the state system.
- For t =
- (a)
- Prior estimates:
- (b)
- Estimation of noise statistics for the measurement system:where r and R are the mean and covariance of the measurement noise, respectively, and n is the number of state noise samples.
- (c)
- Correction:
- (d)
- Posterior state estimates:
- (e)
- Estimation of noise statistics for the state system:where m and M are the mean and covariance of the state noise, respectively.
- (f)
- Next time step (): When 5 new CVs traverse the link, return to step 2a.
3. Results and Discussion
3.1. Performance of Estimation Approaches
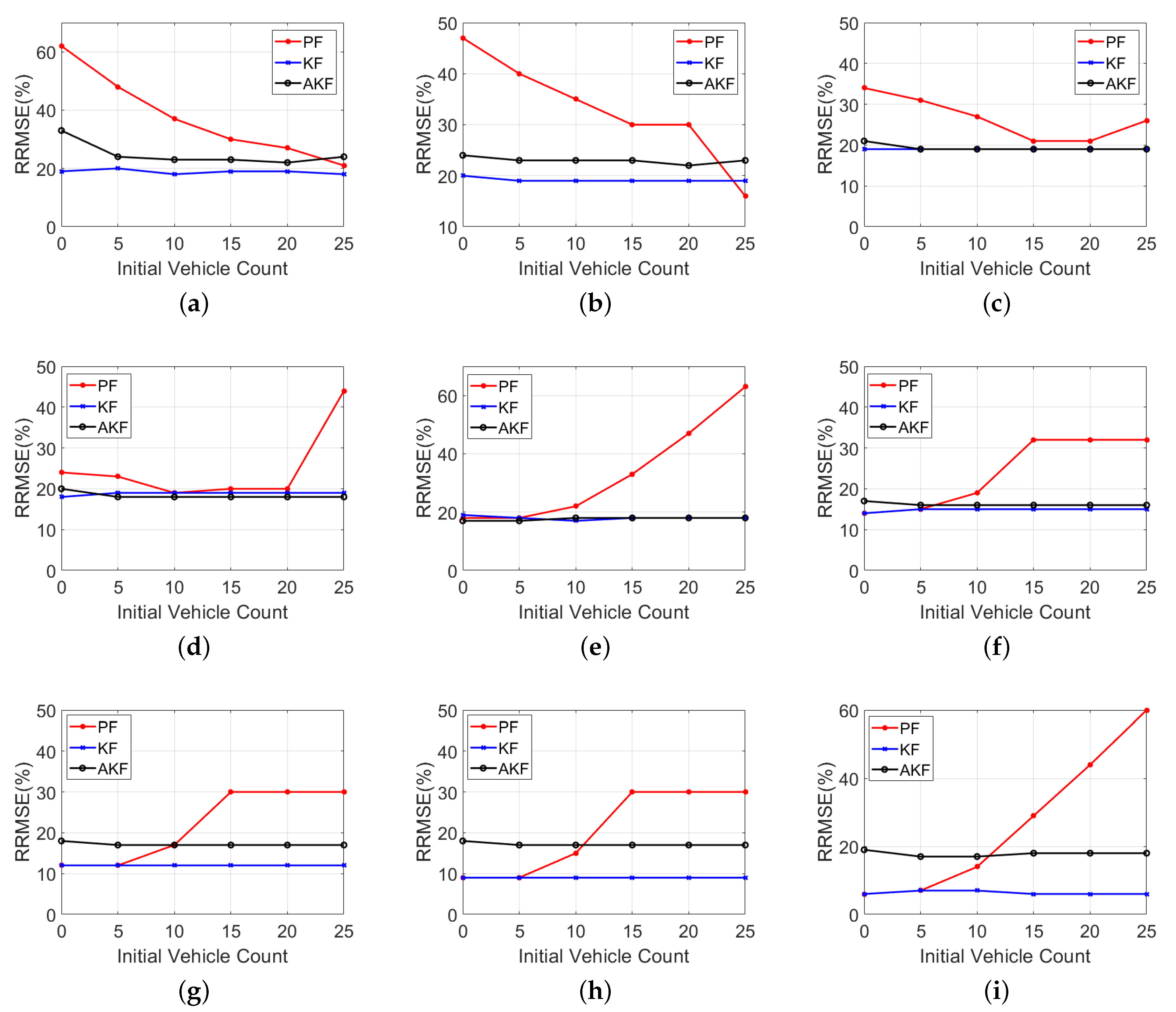
3.2. Impact of Initial Conditions
4. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Abdelghaffar, H.M.; Rakha, H.A. Development and Testing of a Novel Game Theoretic De-Centralized Traffic Signal Controller. IEEE Trans. Intell. Transp. Syst. 2019. [Google Scholar] [CrossRef]
- Chen, H.; Rakha, H.A. Real-time travel time prediction using particle filtering with a non-explicit state-transition model. Transp. Res. Part C Emerg. Technol. 2014, 43, 112–126. [Google Scholar] [CrossRef]
- Vigos, G.; Papageorgiou, M.; Wang, Y. Real-time estimation of vehicle-count within signalized links. Transp. Res. Part C Emerg. Technol. 2008, 16, 18–35. [Google Scholar] [CrossRef]
- Mihaylova, L.; Hegyi, A.; Gning, A.; Boel, R.K. Parallelized particle and Gaussian sum particle filters for large-scale freeway traffic systems. IEEE Trans. Intell. Transp. Syst. 2012, 13, 36–48. [Google Scholar] [CrossRef] [Green Version]
- Pan, T.; Sumalee, A.; Zhong, R.X.; Indra-Payoong, N. Short-term traffic state prediction based on temporal–spatial correlation. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1242–1254. [Google Scholar] [CrossRef]
- Aljamal, M.A.; Abdelghaffar, H.M.; Rakha, H.A. Real-time Estimation of Vehicle Counts on Signalized Intersection Approaches Using Probe Vehicle Data. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef] [Green Version]
- Chu, L.; Oh, S.; Recker, W. Adaptive Kalman filter based freeway travel time estimation. In Proceedings of the 84th TRB Annual Meeting, Washington, DC, USA, 9–13 January 2005; pp. 1–21. [Google Scholar]
- Aljamal, M.A.; Abdelghaffar, H.M.; Rakha, H.A. Kalman filter-based vehicle count estimation approach using probe data: A multi-lane road case study. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 4374–4379. [Google Scholar] [CrossRef]
- Aljamal, M.A.; Abdelghaffar, H.M.; Rakha, H.A. Developing a Neural-Kalman Filtering Approach for Estimating Traffic Stream Density Using Probe Vehicle Data. Sensors 2019, 19, 4325. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Papageorgiou, M. Real-time freeway traffic state estimation based on extended Kalman filter: A general approach. Transp. Res. Part B Methodol. 2005, 39, 141–167. [Google Scholar] [CrossRef]
- Mihaylova, L.; Boel, R. A particle filter for freeway traffic estimation. In Proceedings of the 43rd IEEE Conference on Decision and Control (CDC), Nassau, Bahamas, 14–17 December 2004; pp. 2106–2111. [Google Scholar]
- Mihaylova, L.; Boel, R.; Hegyi, A. Freeway traffic estimation within particle filtering framework. Automatica 2007, 43, 290–300. [Google Scholar] [CrossRef] [Green Version]
- Anand, R.A.; Vanajakshi, L.; Subramanian, S.C. Traffic density estimation under heterogeneous traffic conditions using data fusion. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Baden, Germany, 5–9 June 2011; pp. 31–36. [Google Scholar]
- Abdelghaffar, H.M.; Woolsey, C.A.; Rakha, H.A. Comparison of Three Approaches to Atmospheric Source Localization. J. Aerosp. Inf. Syst. 2017, 14, 40–52. [Google Scholar] [CrossRef]
- Hegyi, A.; Girimonte, D.; Babuska, R.; De Schutter, B. A comparison of filter configurations for freeway traffic state estimation. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 1029–1034. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 21–25 April 1997; pp. 182–193. [Google Scholar]
- Zhai, Y.; Yeary, M. Implementing particle filters with Metropolis-Hastings algorithms. In Proceedings of the Region 5 Conference: Annual Technical and Leadership Workshop, Norman, OK, USA, 2 April 2004; pp. 149–152. [Google Scholar]
- Wright, M.; Horowitz, R. Fusing loop and GPS probe measurements to estimate freeway density. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3577–3590. [Google Scholar] [CrossRef]
- Chen, H.; Rakha, H.A.; Sadek, S. Real-time freeway traffic state prediction: A particle filter approach. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 626–631. [Google Scholar]
- Liu, J.S.; Chen, R. Sequential Monte Carlo methods for dynamic systems. J. Am. Stat. Assoc. 1998, 93, 1032–1044. [Google Scholar] [CrossRef]
- Ristic, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman Filter: Particle Filters for Tracking Applications; Artech House: Norwood, MA, USA, 2003. [Google Scholar]
- Roess, R.P.; Prassas, E.S.; McShane, W.R. Traffic Engineering; Pearson Education: Hoboken, NJ, USA, 2004. [Google Scholar]
- Abdelghaffar, H.M.; Elouni, M.; Bichiou, Y.; Rakha, H.A. Development of a Connected Vehicle Dynamic Freeway Variable Speed Controller. IEEE Access 2020, 8, 99219–99226. [Google Scholar] [CrossRef]
- Cronje, W. Analysis of existing formulas for delay, overflow, and stops. In Proceedings of the 62nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 17–21 January 1983; pp. 89–93. [Google Scholar]
- Calle-Laguna, A.J.; Du, J.; Rakha, H.A. Computing optimum traffic signal cycle length considering vehicle delay and fuel consumption. Transp. Res. Interdisciplin. Perspect. 2019, 3, 100021. [Google Scholar] [CrossRef]
- Balke, K.N.; Charara, H.A.; Parker, R. Development of a Traffic Signal Performance Measurement System (TSPMS); Technical Report; Texas A and M University System: College Station, TX, USA, May 2005. [Google Scholar]
- Roess, R.P.; Prassas, E.S.; McShane, W.R. Traffic Engineering, 15th ed.; Pearson Education: Hoboken, NJ, USA, 2019. [Google Scholar]
- Gazis, D.C. Optimum control of a system of oversaturated intersections. Oper. Res. 1964, 12, 815–831. [Google Scholar] [CrossRef]
- Abdelghaffar, H.M.; Rakha, H.A. A novel decentralized game-theoretic adaptive traffic signal controller: Large-scale testing. Sensors 2019, 19, 2282. [Google Scholar] [CrossRef] [Green Version]
- Cheung, S.Y.; Coleri, S.; Dundar, B.; Ganesh, S.; Tan, C.W.; Varaiya, P. Traffic measurement and vehicle classification with single magnetic sensor. Transp. Res. Rec. 2005, 1917, 173–181. [Google Scholar] [CrossRef]
- Qian, G.; Lee, J.; Chung, E. Algorithm for queue estimation with loop detector of time occupancy in off-ramps on signalized motorways. Transp. Res. Rec. 2012, 2278, 50–56. [Google Scholar] [CrossRef]
- Gerlough, D.L.; Huber, M.J. Traffic flow theory. In Proceedings of the Annual Meeting of the Transportation Research Board, Washington, DC, USA, 19–23 January 1976. [Google Scholar]
- Kurkjian, A.; Gershwin, S.B.; Houpt, P.K.; Willsky, A.S.; Chow, E.; Greene, C. Estimation of roadway traffic density on freeways using presence detector data. Transp. Sci. 1980, 14, 232–261. [Google Scholar] [CrossRef] [Green Version]
- Bhouri, N.; Salem, H.H.; Papageorgiou, M.; Blosseville, J.M. Estimation of traffic density on motorways. In Proceedings of the IFAC/IFIP/IFORS International Symposium (AIPAC’89), Nancy, France, 3–5 July 1989; pp. 579–583. [Google Scholar]
- Mimbela, L.E.Y.; Klein, L.A. Summary of Vehicle Detection and Surveillance Technologies Used in Intelligent Transportation Systems. Technical Report; 2000. Available online: https://www.fhwa.dot.gov/ohim/tvtw/vdstits.pdf (accessed on 4 June 2020).
- Lee, J.; Hernandez, M.; Stoschek, A. Camera System for a Vehicle and Method for Controlling a Camera System. US Patent 8,218,007, 10 July 2012. [Google Scholar]
- Anand, A.; Ramadurai, G.; Vanajakshi, L. Data fusion-based traffic density estimation and prediction. Int. J. Intell. Transp. Syst. Res. 2014, 18, 367–378. [Google Scholar] [CrossRef]
- van Erp, P.B.; Knoop, V.L.; Hoogendoorn, S.P. Estimating the vehicle accumulation: Data-fusion of loop-detector flow and floating car speed data. In Proceedings of the 97th TRB Annual Meeting, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Cheng, P.; Qiu, Z.; Ran, B. Particle filter based traffic state estimation using cell phone network data. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 1047–1052. [Google Scholar]
- Li, T.; Sattar, T.P.; Sun, S. Deterministic resampling: Unbiased sampling to avoid sample impoverishment in particle filters. Signal Process. 2012, 92, 1637–1645. [Google Scholar] [CrossRef]
- Maybeck, P.S. The Kalman filter: An introduction to concepts. In Autonomous Robot Vehicles; Cox, I.J., Wilfong, G.T., Eds.; Springer: New York, NY, USA, 1990; pp. 194–204. [Google Scholar]
- Rakha, H.A. INTEGRATION Release 2.40 for Windows: User’s Guide-Volume II: Advanced Model Features; Technical report; Center for Sustainable Mobility, Virginia Tech Transportation Institute: Blacksburg, VA, USA, June 2020. [Google Scholar] [CrossRef]
- Aljamal, M.A.; Rakha, H.A.; Du, J.; El-Shawarby, I. Comparison of microscopic and mesoscopic traffic modeling tools for evacuation analysis. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2321–2326. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Initial Conditions | KF | AKF | PF |
|---|---|---|---|
| (veh) | 5 | 5 | 5 |
| R (s) | 20 | – | 20 |
| V (veh) | – | – | 5 |
| k (# of part.) | – | – | 200 |
| (veh) | 5 | 5 | – |
| m (veh) | – | 5 | – |
| LMPs % | RRMSE (%) | ||
|---|---|---|---|
| KF | AKF | PF | |
| 1 | 30 | 48 | 64 |
| 3 | 25 | 34 | 60 |
| 5 | 23 | 32 | 56 |
| 8 | 23 | 28 | 52 |
| 10 | 19 | 24 | 48 |
| 15 | 19 | 24 | 42 |
| 20 | 18 | 23 | 40 |
| 30 | 18 | 19 | 30 |
| 40 | 18 | 18 | 22 |
| 50 | 18 | 17 | 18 |
| 60 | 14 | 16 | 15 |
| 70 | 12 | 17 | 12 |
| 80 | 9 | 17 | 9 |
| 90 | 6 | 17 | 7 |
| LMPs % | = 0 | = 5 | = 10 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| KF | AKF | PF | KF | AKF | PF | KF | AKF | PF | |
| 1 | 34 | 71 | 81 | 30 | 48 | 64 | 27 | 36 | 51 |
| 3 | 28 | 49 | 78 | 25 | 34 | 60 | 23 | 26 | 47 |
| 5 | 26 | 45 | 73 | 23 | 32 | 56 | 23 | 27 | 44 |
| 8 | 24 | 33 | 69 | 23 | 28 | 52 | 23 | 27 | 41 |
| 10 | 19 | 33 | 62 | 19 | 24 | 48 | 20 | 24 | 37 |
| 15 | 21 | 29 | 55 | 19 | 24 | 42 | 20 | 23 | 37 |
| 20 | 20 | 24 | 47 | 18 | 23 | 40 | 19 | 23 | 35 |
| 30 | 19 | 21 | 34 | 18 | 19 | 30 | 19 | 19 | 27 |
| 40 | 18 | 20 | 24 | 18 | 18 | 22 | 19 | 18 | 19 |
| 50 | 19 | 17 | 18 | 18 | 17 | 18 | 17 | 17 | 22 |
| 60 | 14 | 17 | 14 | 14 | 16 | 15 | 15 | 16 | 19 |
| 70 | 12 | 18 | 12 | 12 | 17 | 12 | 12 | 17 | 17 |
| 80 | 9 | 18 | 9 | 9 | 17 | 9 | 9 | 17 | 15 |
| 90 | 6 | 17 | 6 | 6 | 17 | 7 | 7 | 17 | 14 |
| LMPs % | = 15 | = 20 | = 25 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| KF | AKF | PF | KF | AKF | PF | KF | AKF | PF | |
| 1 | 23 | 32 | 36 | 20 | 23 | 24 | 19 | 21 | 17 |
| 3 | 22 | 26 | 33 | 20 | 25 | 24 | 20 | 24 | 19 |
| 5 | 21 | 25 | 31 | 20 | 23 | 26 | 19 | 24 | 20 |
| 8 | 21 | 27 | 33 | 22 | 26 | 26 | 21 | 26 | 23 |
| 10 | 20 | 24 | 30 | 20 | 24 | 27 | 19 | 26 | 22 |
| 15 | 19 | 23 | 30 | 19 | 24 | 26 | 19 | 23 | 18 |
| 20 | 19 | 23 | 30 | 19 | 23 | 30 | 19 | 23 | 16 |
| 30 | 19 | 19 | 21 | 19 | 19 | 21 | 19 | 19 | 26 |
| 40 | 19 | 18 | 20 | 19 | 18 | 20 | 19 | 18 | 44 |
| 50 | 18 | 17 | 33 | 18 | 17 | 47 | 18 | 17 | 33 |
| 60 | 15 | 16 | 32 | 15 | 16 | 32 | 15 | 16 | 32 |
| 70 | 12 | 17 | 30 | 12 | 17 | 30 | 12 | 17 | 30 |
| 80 | 9 | 17 | 30 | 9 | 17 | 30 | 9 | 17 | 30 |
| 90 | 7 | 17 | 29 | 7 | 17 | 44 | 7 | 17 | 29 |
| LMPs % | RRMSE (%) | ||||
|---|---|---|---|---|---|
| k = 10 | k = 100 | k = 200 | k = 1000 | k = 2000 | |
| 1 | 72 | 66 | 64 | 61 | 59 |
| 3 | 69 | 62 | 60 | 57 | 56 |
| 5 | 66 | 59 | 56 | 53 | 52 |
| 8 | 60 | 54 | 52 | 48 | 47 |
| 10 | 56 | 50 | 48 | 46 | 44 |
| 15 | 48 | 44 | 42 | 40 | 40 |
| 20 | 44 | 41 | 40 | 38 | 36 |
| 30 | 34 | 30 | 30 | 30 | 30 |
| 40 | 22 | 22 | 22 | 22 | 22 |
| 50 | 19 | 18 | 18 | 18 | 17 |
| 60 | 16 | 15 | 15 | 14 | 14 |
| 70 | 13 | 12 | 12 | 12 | 11 |
| 80 | 11 | 9 | 9 | 9 | 9 |
| 90 | 9 | 7 | 7 | 6 | 6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aljamal, M.A.; Abdelghaffar, H.M.; Rakha, H.A. Estimation of Traffic Stream Density Using Connected Vehicle Data: Linear and Nonlinear Filtering Approaches. Sensors 2020, 20, 4066. https://doi.org/10.3390/s20154066
Aljamal MA, Abdelghaffar HM, Rakha HA. Estimation of Traffic Stream Density Using Connected Vehicle Data: Linear and Nonlinear Filtering Approaches. Sensors. 2020; 20(15):4066. https://doi.org/10.3390/s20154066
Chicago/Turabian StyleAljamal, Mohammad A., Hossam M. Abdelghaffar, and Hesham A. Rakha. 2020. "Estimation of Traffic Stream Density Using Connected Vehicle Data: Linear and Nonlinear Filtering Approaches" Sensors 20, no. 15: 4066. https://doi.org/10.3390/s20154066
APA StyleAljamal, M. A., Abdelghaffar, H. M., & Rakha, H. A. (2020). Estimation of Traffic Stream Density Using Connected Vehicle Data: Linear and Nonlinear Filtering Approaches. Sensors, 20(15), 4066. https://doi.org/10.3390/s20154066