Vital Sign Detection during Large-Scale and Fast Body Movements Based on an Adaptive Noise Cancellation Algorithm Using a Single Doppler Radar Sensor


Abstract
:1. Introduction
2. RBM Cancellation
2.1. The Effect of Random Body Movements
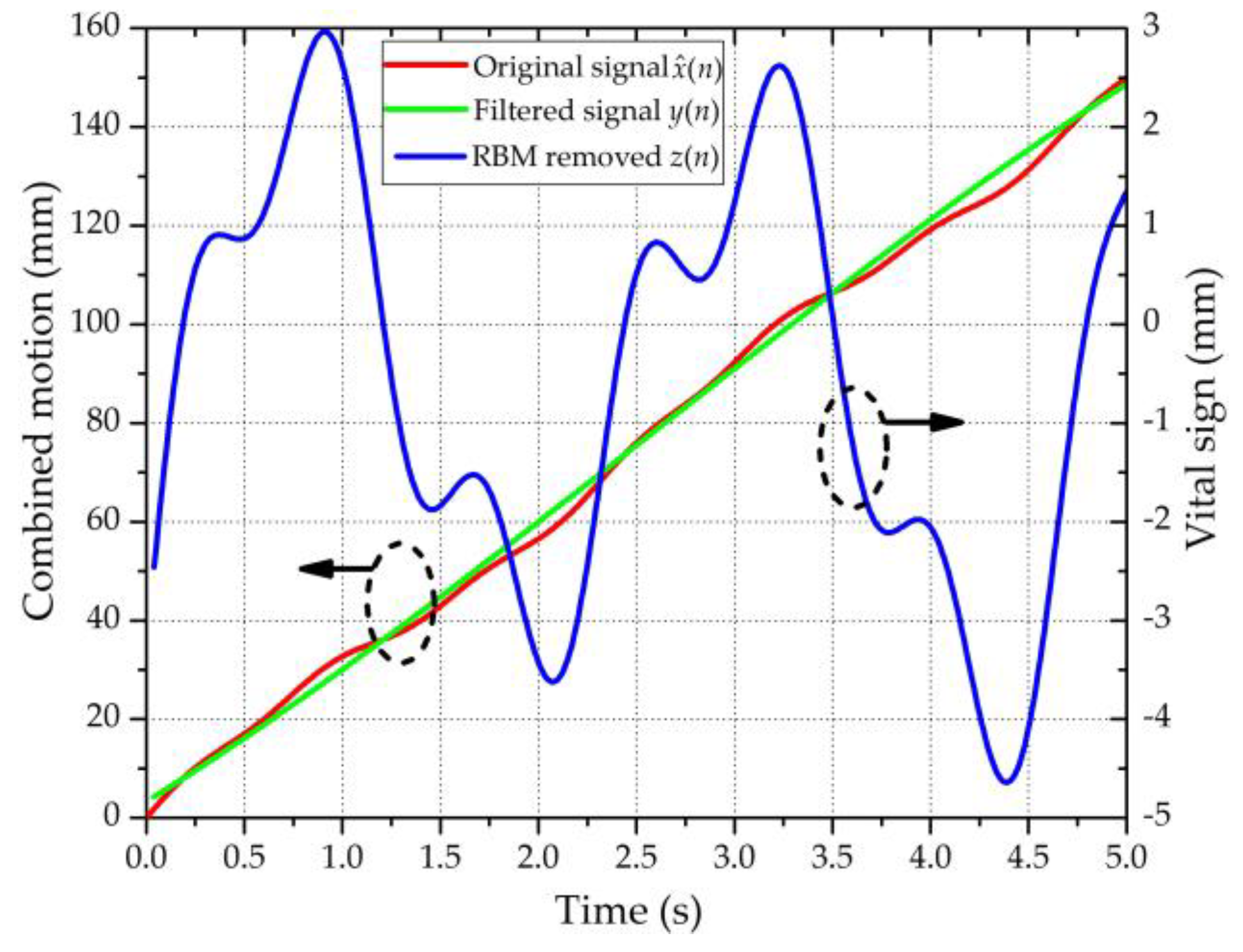
2.2. Adaptive Noise Cancellation (ANC)
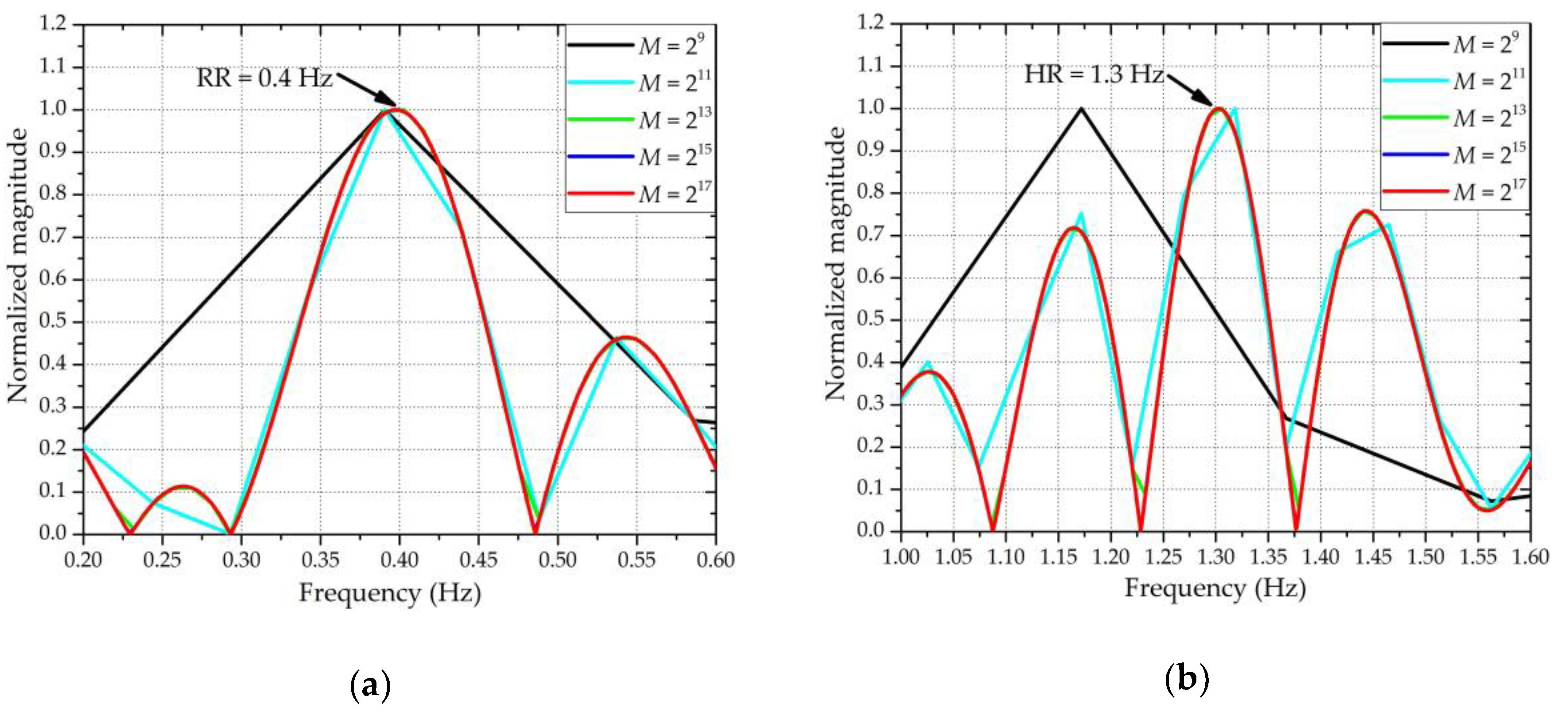
2.3. New-Type Discrete Cosine Transform.
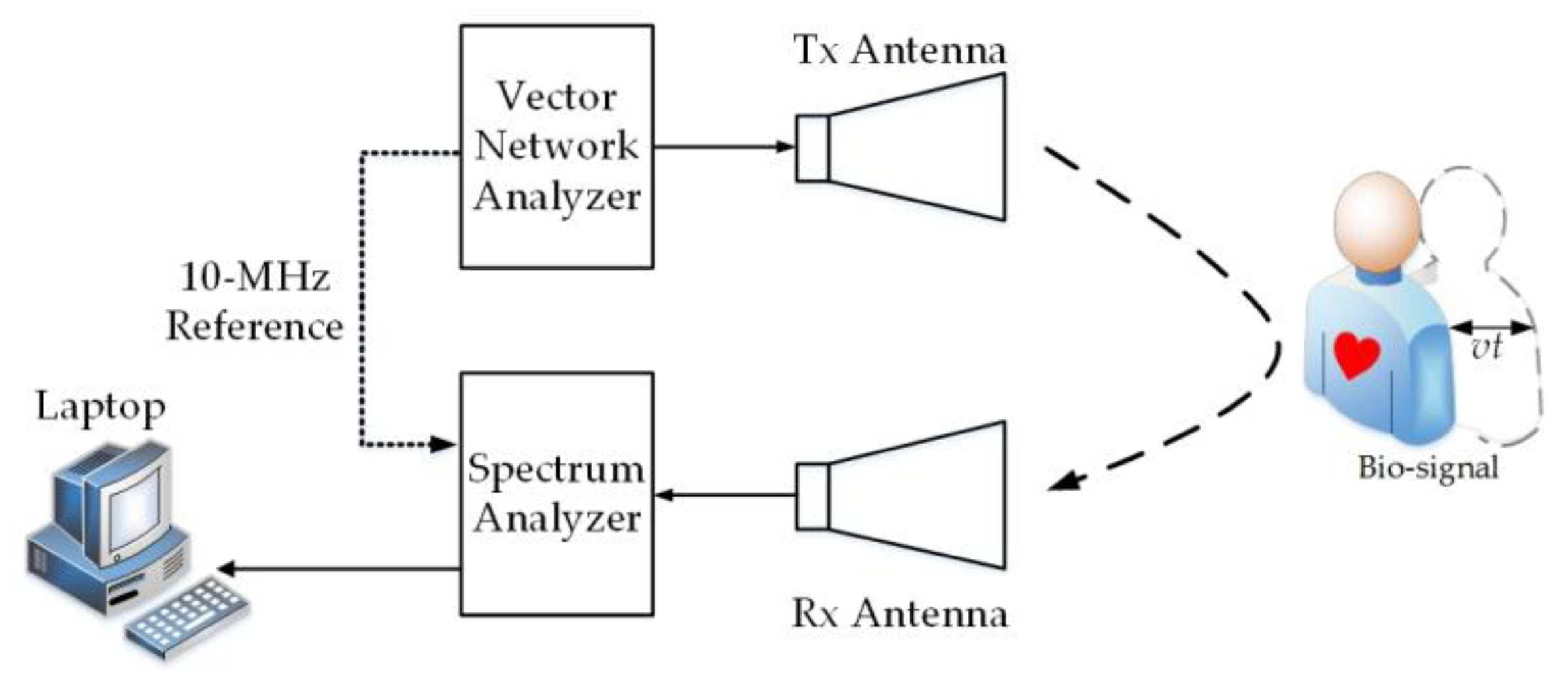
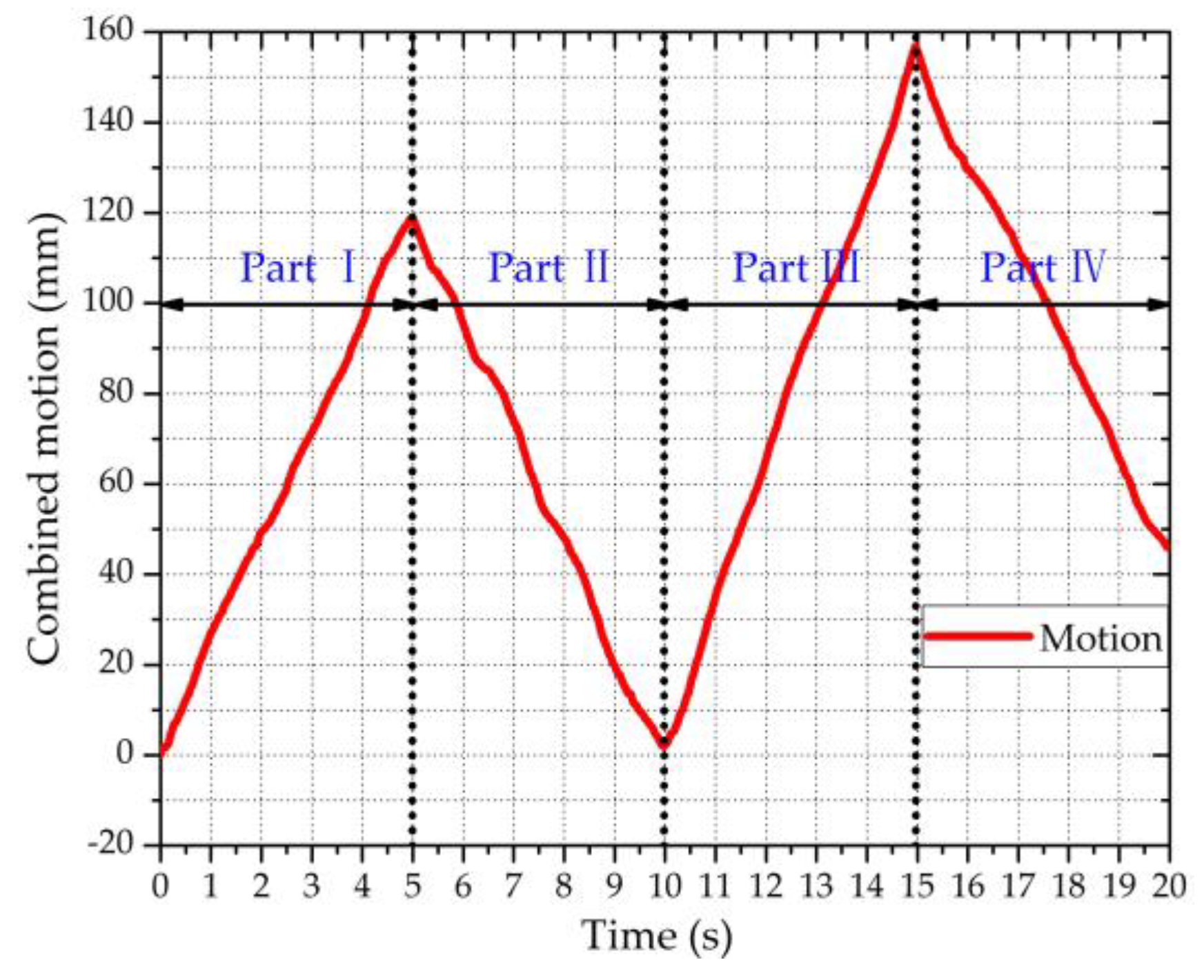
3. Experiments
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gu, C.; Inoue, T.; Li, C. Analysis and experiment on the modulation sensitivity of doppler radar vibration measurement. IEEE Microw. Wirel. Compon. Lett. 2013, 23, 566–568. [Google Scholar] [CrossRef]
- Petrović, V.; Jankovic, M.M.; Lupsic, A.V.; Mihajlovic, V.R.; Popovic-Bozovic, J.S. High-accuracy real-time monitoring of heart rate variability using 24 GHz continuous-wave doppler radar. IEEE Access 2019, 7, 74721–74733. [Google Scholar] [CrossRef]
- Sun, L.; Hong, H.; Li, Y.; Gu, C.; Xi, F.; Li, C.; Zhu, X. Noncontact vital sign detection based on stepwise atomic norm minimization. IEEE Signal Process. Lett. 2015, 22, 2479–2483. [Google Scholar] [CrossRef]
- Li, X.-L.; Liu, B.; Liu, Y.; Li, J.; Lai, J.; Zheng, Z. A novel signal separation and de-noising technique for doppler radar vital signal detection. Sensors 2019, 19, 4751. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.-Y.; Park, J.-H.; Jang, S.-Y.; Yang, J.-R. Peak detection algorithm for vital sign detection using doppler radar sensors. Sensors 2019, 19, 1575. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Lin, J. Wavelet-transform-based data-length-variation technique for fast heart rate detection using 5.8-GHz CW doppler radar. IEEE Trans. Microw. Theory Tech. 2017, 66, 568–576. [Google Scholar] [CrossRef]
- Nosrati, M.; Tavassolian, N. High-accuracy heart rate variability monitoring using doppler radar based on gaussian pulse train modeling and FTPR algorithm. IEEE Trans. Microw. Theory Tech. 2017, 66, 556–567. [Google Scholar] [CrossRef]
- Yamamoto, K.; Toyoda, K.; Ohtsuki, T. Spectrogram-based non-contact RRI estimation by accurate peak detection algorithm. IEEE Access 2018, 6, 60369–60379. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.; Zhu, Z.; Huangfu, J.; Li, C.; Ran, L. 1-D microwave imaging of human cardiac motion: An Ab-initio investigation. IEEE Trans. Microw. Theory Tech. 2013, 61, 2101–2107. [Google Scholar] [CrossRef]
- Massagram, W.; Lubecke, V.; Host-Madsen, A.; Boric-Lubecke, O. Assessment of heart rate variability and respiratory sinus arrhythmia via doppler radar. IEEE Trans. Microw. Theory Tech. 2009, 57, 2542–2549. [Google Scholar] [CrossRef]
- Xiao, Y.; Lin, J.; Boric-Lubecke, O.; Lubecke, M. Frequency-tuning technique for remote detection of heartbeat and respiration using low-power double-sideband transmission in the ka-band. IEEE Trans. Microw. Theory Tech. 2006, 54, 2023–2032. [Google Scholar] [CrossRef]
- Lv, Q.; Ye, D.; Qiao, S.; Salamin, Y.; Huangfu, J.; Li, C.; Ran, L. High dynamic-range motion imaging based on linearized doppler radar sensor. IEEE Trans. Microw. Theory Tech. 2014, 62, 1837–1846. [Google Scholar] [CrossRef]
- Park, B.-K.; Boric-Lubecke, O.; Lubecke, V.M. Arctangent demodulation with DC offset compensation in quadrature doppler radar receiver systems. IEEE Trans. Microw. Theory Tech. 2007, 55, 1073–1079. [Google Scholar] [CrossRef]
- Fan, T.; Ma, C.; Gu, Z.; Lv, Q.; Chen, J.; Ye, D.; Huangfu, J.; Sun, Y.; Li, C.; Ran, L. Wireless hand gesture recognition based on continuous-wave doppler radar sensors. IEEE Trans. Microw. Theory Tech. 2016, 64, 4012–4020. [Google Scholar] [CrossRef]
- Saluja, J.J.; Casanova, J.J.; Lin, J. A supervised machine learning algorithm for heart-rate detection using doppler motion-sensing radar. IEEE J. Electromagn. RF Microwaves Med. Boil. 2020, 4, 45–51. [Google Scholar] [CrossRef]
- Li, C.; Lin, J. Random body movement cancellation in doppler radar vital sign detection. IEEE Trans. Microw. Theory Tech. 2008, 56, 3143–3152. [Google Scholar] [CrossRef]
- Wang, F.-K.; Horng, T.-S.; Peng, K.-C.; Jau, J.-K.; Li, J.-Y.; Chen, C.-C. Single-antenna doppler radars using self and mutual injection locking for vital sign detection with random body movement cancellation. IEEE Trans. Microw. Theory Tech. 2011, 59, 3577–3587. [Google Scholar] [CrossRef]
- Gu, C.; Wang, G.; Li, Y.; Inoue, T.; Li, C. A hybrid radar-camera sensing system with phase compensation for random body movement cancellation in doppler vital sign detection. IEEE Trans. Microw. Theory Tech. 2013, 61, 4678–4688. [Google Scholar] [CrossRef]
- Tang, M.-C.; Kuo, C.-Y.; Wun, D.-C.; Wang, F.-K.; Horng, T.-S. A self- and mutually injection-locked radar system for monitoring vital signs in real time with random body movement cancellation. IEEE Trans. Microw. Theory Tech. 2016, 64, 4812–4822. [Google Scholar] [CrossRef]
- Tang, M.-C.; Wang, F.-K.; Horng, T.-S. Single self-injection-locked radar with two antennas for monitoring vital signs with large body movement cancellation. IEEE Trans. Microw. Theory Tech. 2017, 65, 5324–5333. [Google Scholar] [CrossRef]
- Lv, Q.; Chen, L.; An, K.; Wang, J.; Li, H.; Ye, D.; Huangfu, J.; Li, C.; Ran, L. Doppler vital signs detection in the presence of large-scale random body movements. IEEE Trans. Microw. Theory Tech. 2018, 66, 4261–4270. [Google Scholar] [CrossRef]
- Tu, J.; Hwang, T.; Lin, J. Respiration rate measurement under 1-D body motion using single continuous-wave doppler radar vital sign detection system. IEEE Trans. Microw. Theory Tech. 2016, 64, 1937–1946. [Google Scholar] [CrossRef]
- Droitcour, A.D.; Boric-Lubecke, O.; Lubecke, V.M.; Lin, J.; Kovacs, G.T.A. Range correlation and I/Q performance benefits in single-chip silicon doppler radars for noncontact cardiopulmonary monitoring. IEEE Trans. Microw. Theory Tech. 2004, 52, 838–848. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.; Huangfu, J.; Li, C.; Ran, L. Non-contact distance and amplitude independent vibration measurement based on an extended DACM algorithm. IEEE Trans. Instrum. Meas. 2014, 63, 145–153. [Google Scholar] [CrossRef]
- Haykin, S.O. Adaptive Filter Theory, 5th ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2014; pp. 22–23. [Google Scholar]
- Yang, Z.-K.; Zhao, S.; Huang, X.-D.; Lu, W.; Lv, W. Accurate doppler radar-based heart rate measurement using matched filter. IEICE Electron. Express 2020, 17, 20200062. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Ham, J.-W.; Park, S.; Kim, D.-H.; Park, S.-J.; Kang, H.; Park, S.-O. Polyphase-basis discrete cosine transform for real-time measurement of heart rate with CW doppler radar. IEEE Trans. Microw. Theory Tech. 2018, 66, 1644–1659. [Google Scholar] [CrossRef]
- Narasimhan, S.V.; Harish, M. A new spectral estimator based on discrete cosine transform and modified group delay. In Proceedings of the Conference on Convergent Technologies for Asia-Pacific Region, Bangalore, India, 15–17 October 2003. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | RR | HR | ||
|---|---|---|---|---|
| FFT | N-DCT | FFT | N-DCT | |
| Part Ⅰ | 61.50% | −1.75% | −2.80% | 0.48% |
| Part Ⅱ | 10.17% | 0.50% | −3.17% | 0.42% |
| Part Ⅲ | 13.71% | 2.57% | −2.05% | 0.08% |
| Part Ⅳ | −16.75% | −3.75% | −7.32% | −2.49% |
| Average | 25.53% | 2.14% | 3.84% | 0.87% |
| Experiment | RR | HR | ||
|---|---|---|---|---|
| FFT | N-DCT | FFT | N-DCT | |
| Part Ⅰ | 27.78% | 8.67% | 7.55% | 2.39% |
| Part Ⅱ | 24.20% | 0.40% | 8.61% | 0.99% |
| Part Ⅲ | 17.09% | −0.91% | 8.64% | −1.07% |
| Part Ⅳ | 30.00% | 9.45% | −6.04% | −0.55% |
| Average | 24.77% | 4.86% | 7.71% | 1.25% |
| Ref. No. | Maximum RBM Range | Maximum RBM Velocity | Maximum Detection Distance | Error of RR | Error of HR | A Single Radar Sensor | Both RR and HR Are Measured |
|---|---|---|---|---|---|---|---|
| [16] | Not Mentioned | 4 mm/s | Not Mentioned | Not Mentioned | Not Mentioned | No | Yes |
| [17] | 100 mm | Not Mentioned | 1 m | Not Mentioned | Not Mentioned | No | Yes |
| [18] | Not Mentioned | Not Mentioned | Not Mentioned | Not Mentioned | Not Mentioned | No | Yes |
| [19] | 60 mm | Not Mentioned | 0.7 m | Not Mentioned | Not Mentioned | No | Yes |
| [20] | 200 mm | <7.7 mm/s | 1.35 m | Not Mentioned | Not Mentioned | No | Yes |
| [21] | 150 mm | ≈0 mm/s 1 | 1.5 m | Not Mentioned | Not Mentioned | Yes | Yes |
| [22] | Not Mentioned | 20 mm/s | Not Mentioned | 7.15% | Not Mentioned | Yes | Only RR |
| This work | 155 mm | 47.6 mm/s | 1.5 m | 2.14% 2 | 0.87% 2 | Yes | Yes |
| 4.86% 3 | 1.25% 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.-K.; Shi, H.; Zhao, S.; Huang, X.-D. Vital Sign Detection during Large-Scale and Fast Body Movements Based on an Adaptive Noise Cancellation Algorithm Using a Single Doppler Radar Sensor. Sensors 2020, 20, 4183. https://doi.org/10.3390/s20154183
Yang Z-K, Shi H, Zhao S, Huang X-D. Vital Sign Detection during Large-Scale and Fast Body Movements Based on an Adaptive Noise Cancellation Algorithm Using a Single Doppler Radar Sensor. Sensors. 2020; 20(15):4183. https://doi.org/10.3390/s20154183
Chicago/Turabian StyleYang, Zi-Kai, Heping Shi, Sheng Zhao, and Xiang-Dong Huang. 2020. "Vital Sign Detection during Large-Scale and Fast Body Movements Based on an Adaptive Noise Cancellation Algorithm Using a Single Doppler Radar Sensor" Sensors 20, no. 15: 4183. https://doi.org/10.3390/s20154183
APA StyleYang, Z. -K., Shi, H., Zhao, S., & Huang, X. -D. (2020). Vital Sign Detection during Large-Scale and Fast Body Movements Based on an Adaptive Noise Cancellation Algorithm Using a Single Doppler Radar Sensor. Sensors, 20(15), 4183. https://doi.org/10.3390/s20154183