A Scale-Adaptive Matching Algorithm for Underwater Acoustic and Optical Images


Abstract
:1. Introduction
2. Related Work
3. Proposed Method
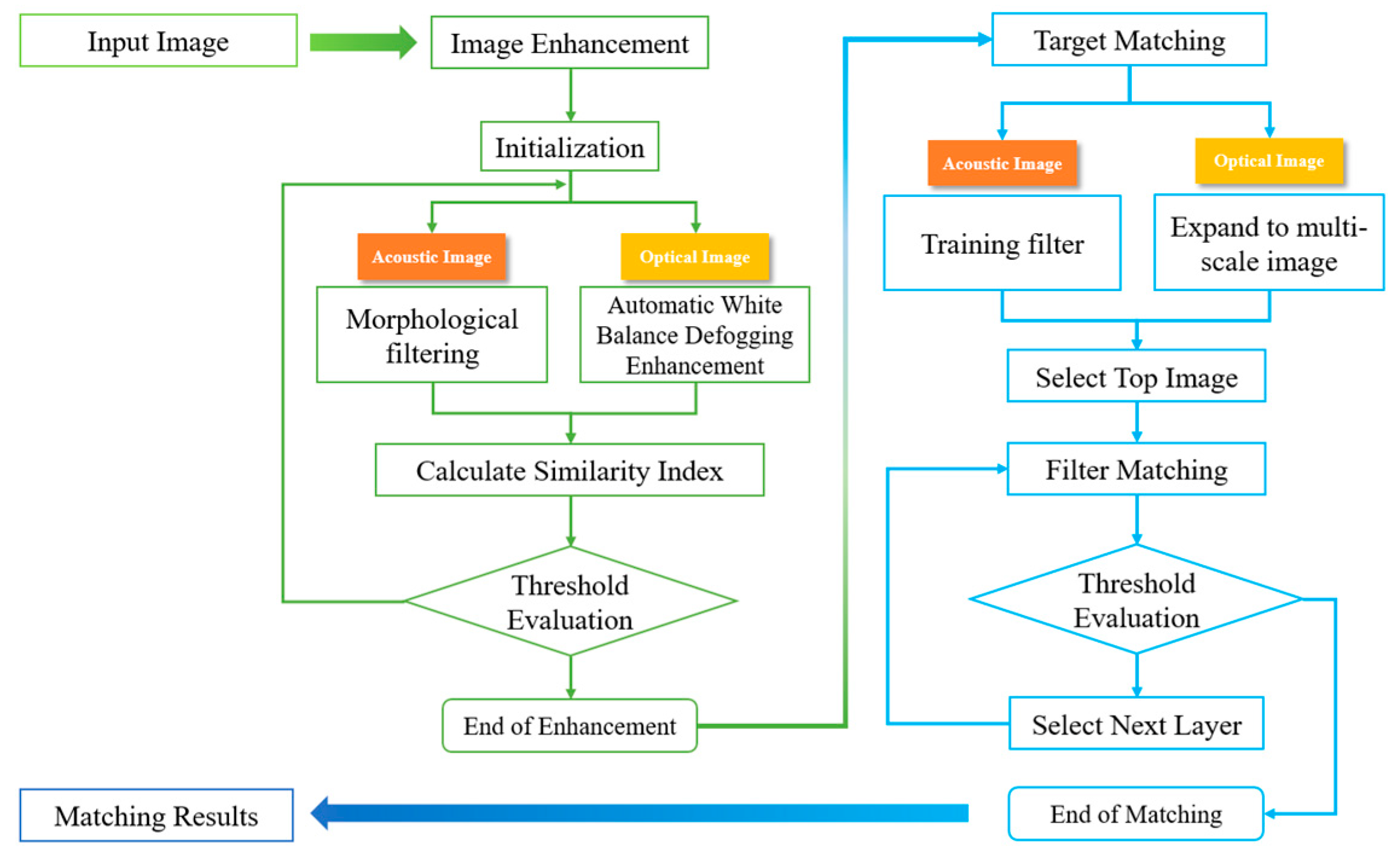
3.1. System Overview
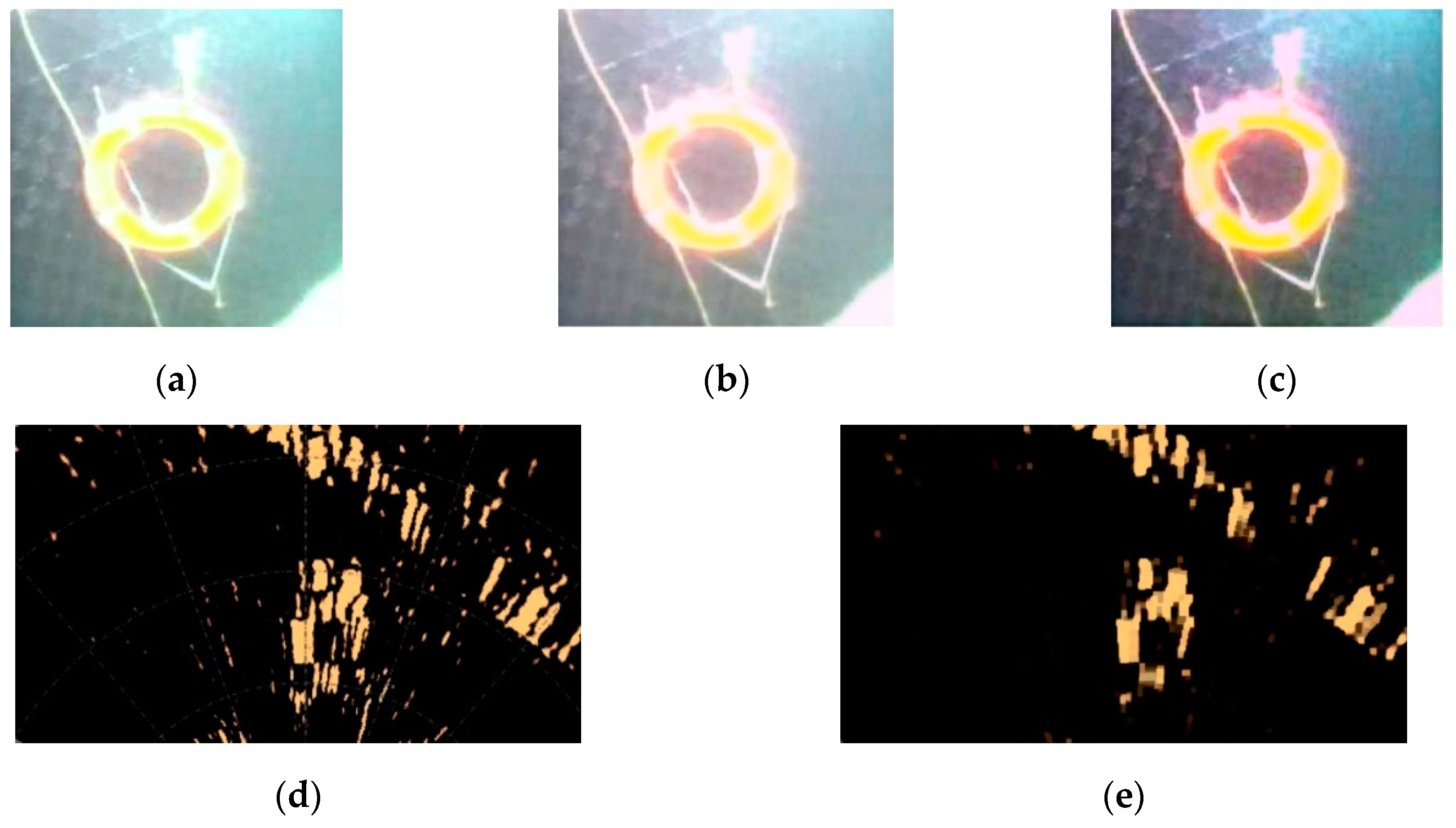
3.2. Image Pre-Processing
3.3. Iterative Enhancement Based on Matching Degree
| Algorithm 1 Iterative Enhancement |
| Input: Original image; Initial values of parameters; Output: Enhanced image with high similarity 1: procedure Iterative Enhancement 2: initial θ, α, e; 3: repeat: 4: optimage←AWB-Defogging (optimage, θ, α); 5: acoimage←Morphology (acoimage, e); 6: CalGradient (θ, α, e); 7: SI ←CalSI(); 8: until (SI > Threshold); 9: end procedure |
- Determine the initial parameters of the white balance, defog, and morphological filtering algorithm, including the color deviation retention parameter θ of the gray world automatic white balance algorithm, the ambient light retention parameter α in the dark channel priority algorithm, and the morphological filtering constraint E.
- The existing parameters are used to enhance the underwater acoustic images and underwater optical images. For optical images, the gray world based automatic white balance algorithm and dark channel priority defogging algorithm are used. Morphological filtering is used to enhance the acoustic images.
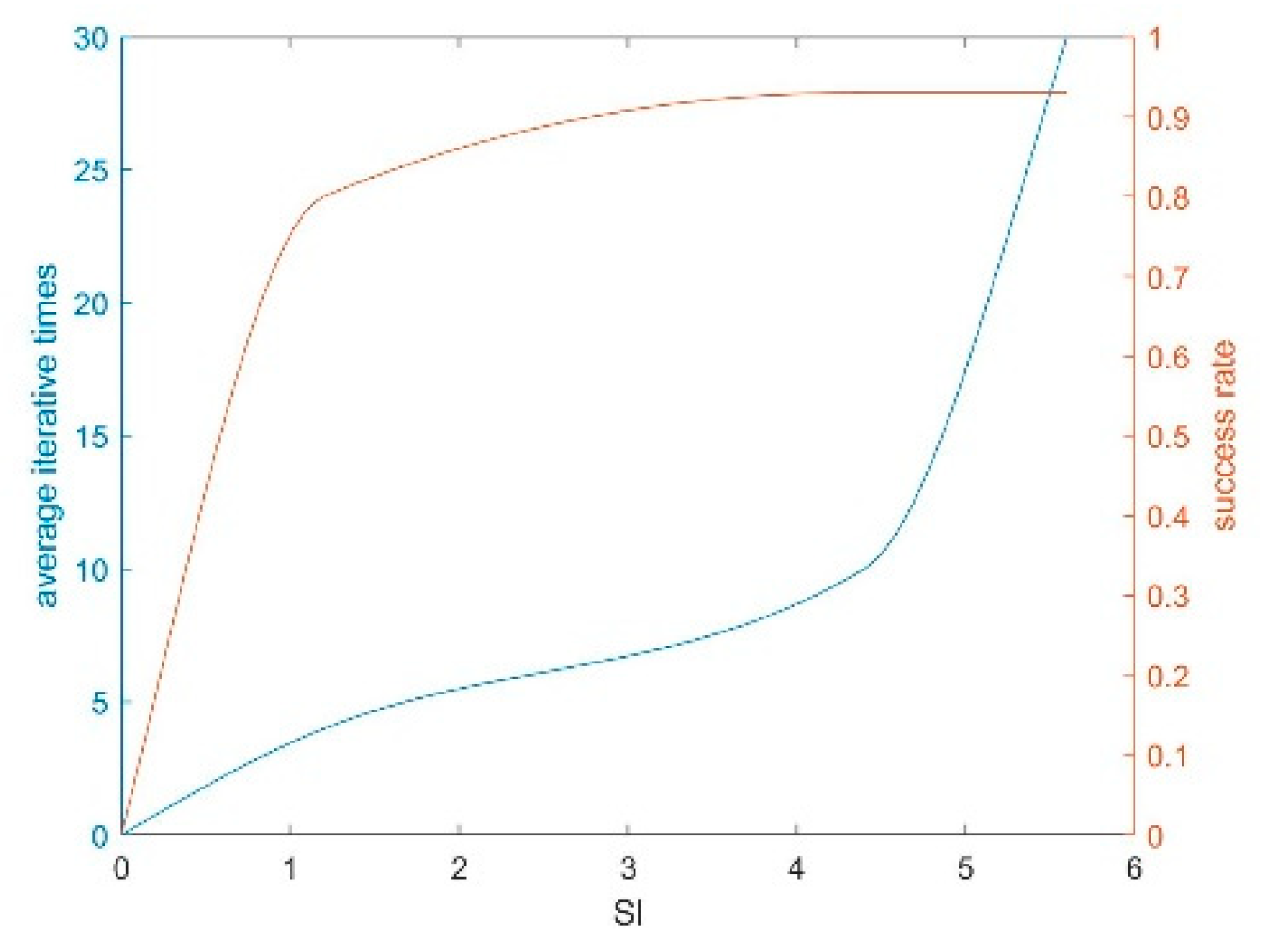
- For the enhanced images in the second step, the peak signal-to-noise ratio (PSNR) and structural similarity (SSIM) are used to measure the similarity of the two images, and weighted fusion is carried out according to the influence of each index on similarity to obtain the final similarity index (SI). If the similarity index is higher than the specified threshold, the algorithm ends. Otherwise, it continues with step 4. The specific SI values are calculated as follows:where w1 and w2 are the weight coefficients valued at 0.3 and 0.7, respectively, and K is the coefficient value of measurement difference, which is valued at 15. The experimental results show that when the SI threshold value is taken 12, the overall image enhancement effect is better.
- Determine the parameters of the enhancement algorithm in the next iteration. The similarity index has a functional relationship with the color deviation retention parameter θ of the gray world automatic white balance algorithm, the ambient light retention parameter α in the dark channel priority algorithm, and the morphological filter constraint e: SI = J (θ, α, e). We used the gradient ascent method to obtain the parameter difference between the next iteration and the current iteration, and thus obtain the parameters of the next iteration. The algorithm then returns to the second step to continue the iteration. Through the iterative enhancement of the two images, the problems of color distortion, contour blur, detail loss, and noise suppression are addressed. In addition, the two images tend to be consistent in terms of structural similarity and signal-to-noise ratio.
3.4. Image Matching Based on Image Spatial Features
3.4.1. Filter Training
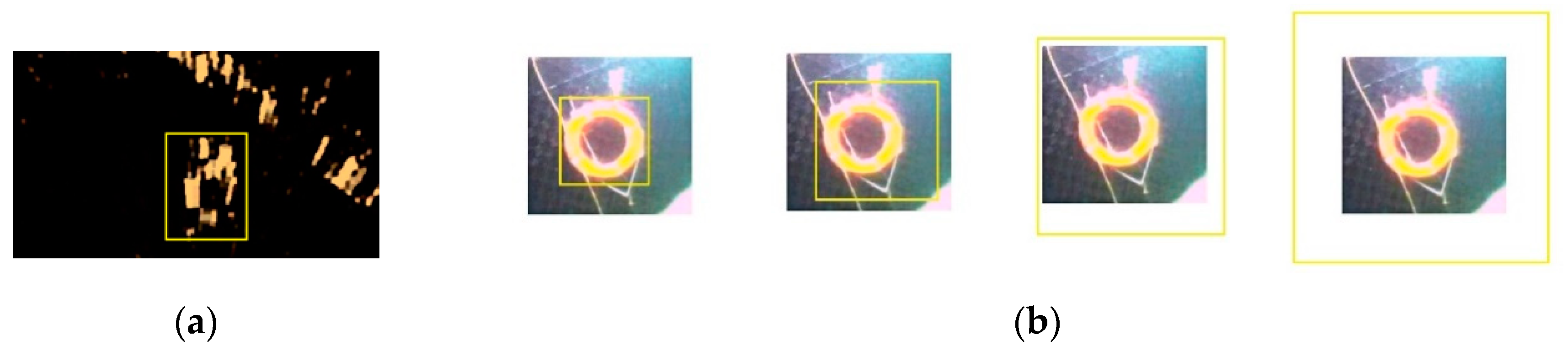
3.4.2. Target Matching
4. Results
4.1. Dataset
4.2. Implementation Details
4.3. Comparison with Other Methods
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Guo, G.; Wang, X.-K.; Xu, H.-P. Review on underwater target detection, recognition and tracking based on sonar image. Control Decis. 2018. [Google Scholar] [CrossRef]
- Han, M.; Lyu, Z.; Qiu, T. A Review on Intelligence Dehazing and Color Restoration for Underwater Images. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1–13. [Google Scholar] [CrossRef]
- Kenneth, G.F. Underwater acoustic technology: Review of some recent developments. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, J.; Zhu, B. A Side Scan Sonar Image Target Detection Algorithm Based on a Neutrosophic Set and Diffusion Maps. Remote Sens. 2018, 10, 295. [Google Scholar] [CrossRef] [Green Version]
- Kong, W.; Yu, J.; Cheng, Y. Automatic Detection Technology of Sonar Image Target Based on the Three-Dimensional Imaging. J. Sens. 2017, 2017. [Google Scholar] [CrossRef] [Green Version]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the Circulant Structure of Tracking-by-Detection with Kernels. In Computer Vision—ECCV 2012; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Li, Y.; Zhu, J. A Scale Adaptive Kernel Correlation Filter Tracker with Feature Integration. In Computer Vision—ECCV 2014 Workshops; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2015; Volume 8926. [Google Scholar]
- Olkkonen, H.; Pesola, P. Gaussian Pyramid Wavelet Transform for Multiresolution Analysis of Images. Graph. Models Image Process. 1996, 58, 394–398. [Google Scholar] [CrossRef]
- Zhang, N.; Donahue, J.; Girshick, R. Part-Based R-CNNs for Fine-Grained Category Detection. In Computer Vision—ECCV 2014; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2014; Volume 8689. [Google Scholar]
- He, K.; Zhang, X.; Ren, S. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 346–361. [Google Scholar]
- Huang, B.; Yang, F.; Yin, M. A Review of Multimodal Medical Image Fusion Techniques. Comput. Math. Methods Med. 2020, 2020, 1–16. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R. You Only Look Once: Unified, Real-Time Object Detection. IEEE Conf. Comput. Vis. Pattern Recognit. 2015. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Li, H.; Wang, P. An Image Registration Method for Multisource High-Resolution Remote Sensing Images for Earthquake Disaster Assessment. Sensors 2020, 20, 2286. [Google Scholar] [CrossRef] [Green Version]
- Mahapatra, D.; Ge, Z.T. Data Independent Image Registration with GANs Using Transfer Learning and Segmentation Information. In Proceedings of the IEEE 16th International Symposium on Biomedical Imaging (ISBI), Venice, Italy, 8–11 April 2019. [Google Scholar]
- Han, E.Y.; Chao, M.; Zhang, X. Feasibility Study on Deformable Image Registration for Lung SBRT Patients for Dose-Driven Adaptive Therapy. Int. J. Med. Phys. Clin. Eng. Radiat. Oncol. 2015, 4, 224–232. [Google Scholar] [CrossRef]
- Barnea, D.I.; Silverman, H.F. A Class of Algorithms for Fast Digital Image Registration. IEEE Trans. Comput. 1972, 21, 179–186. [Google Scholar] [CrossRef]
- Gérard, M.; Ramakant, N. Matching Images Using Linear Features. IEEE Trans. Pattern Anal. Mach. Intell. 1984, 6, 675–685. [Google Scholar]
- Bolme, D.S.; Beveridge, J.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar]
- Liu, G.; Lv, Q.; Liu, Y. Single Image Dehazing Algorithm Based on Adaptive Dark Channel Prior. Acta Photonica Sin. 2018, 47, 210001. [Google Scholar]
- Gehler, P.V.; Rother, C.; Blake, A. Bayesian Color Constancy Revisited. In Proceedings of the 2008 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2008), Anchorage, AK, USA, 24–26 June 2008. [Google Scholar]
- Stanley, R.S. Grayscale morphology. Comp. Gr. Image Process. 1986, 35. [Google Scholar]
- Xu, J.B.; Yuan, Y.B.; Cui, X.M. Rational approximation implementation approach to determine Gaussian filtering mean line in surface roughness measurement. Jilin DaxueXuebao 2014, 44, 1347–1352. [Google Scholar]
- Cardei, V.C.; Funt, B.; Barnard, K. White Point Estimation for Uncalibrated Images. In Proceedings of the 7th IS and T/SID Color Imaging Conference: Color Science, Systems and Applications, Scottsdale, AZ, USA, 16–19 November 1999. [Google Scholar]
- Buchsbaum, G. A spatial processor model for object colour perception. J. Frankl. Inst. 1980, 310, 1–26. [Google Scholar] [CrossRef]
- Weijer, J.V.D.; Gevers, T.; Gijsenij, A. Edge-Based Color Constancy. IEEE Trans. Image Process. 2007, 16, 2207–2214. [Google Scholar] [CrossRef] [Green Version]
- Rahman, Z.; Woodell, G.A. Multi-scale retinex for color image enhancement. In Proceedings of the 3rd IEEE International Conference on Image Processing, Lausanne, Switzerland, 19 September 1996; Volume 3, pp. 1003–1006. [Google Scholar] [CrossRef]
- Durand, F.; Dorsey, J. Fast Bilateral Filtering for the Display of High-Dynamic-Range Images. ACM Trans. Graph. 2002, 21, 257–266. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Single Image Haze Removal Using Dark Channel Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar]
- Bai, X.; Zhou, F.; Xue, B. Image enhancement using multi scale image features extracted by top-hat transform. Opt. Laser Technol. 2012, 44, 328–336. [Google Scholar]
- Suykens, J.A.K.; Vandewalle, J. Least Squares Support Vector Machine Classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Ratsch, G. Soft margins for adaboost. Mach. Learn. 2001, 42, 287–320. [Google Scholar]
- Wang, C.; Blei, D.M.; Li, F.F. Simultaneous image classification and annotation. In Proceedings of the IEEE Computer Society Conference on Computer Vision & Pattern Recognition, Miami, FL, USA, 20–25 June 2009. [Google Scholar]
- Keane, R.D.; Adrian, R.J. Theory of cross-correlation analysis of PIV images. Appl. Sci. Res. 1992, 49, 191–215. [Google Scholar] [CrossRef]
- Mahdi, G.A.; Reza, R. A new approach for fault detection of broken rotor bars in induction motor based on support vector machine. In Proceedings of the 2010 18th Iranian Conference on Electrical Engineering, Isfahan, Iran, 11–13 May 2010. [Google Scholar] [CrossRef]
- Zhang, L.; Koch, R. An efficient and robust line segment matching approach based on LBD descriptor and pairwise geometric consistency. J. Vis. Commun. Image Represent. 2013, 24, 794–805. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial SSIM | Initial PSNR | Initial SI | Final SSIM | Final PSNR | Final SI |
|---|---|---|---|---|---|
| 0.3773 | 5.2023 | 5.5228 | 0.3670 | 11.0787 | 7.1770 |
| 0.2636 | 8.0049 | 5.1693 | 0.2772 | 10.8896 | 6.1775 |
| 0.0073 | 3.3679 | 1.0868 | 0.4411 | 3.3679 | 5.6423 |
| 0.2214 | 10.0480 | 5.3393 | 0.5490 | 7.5381 | 8.0262 |
| 0.5277 | 6.3500 | 7.4460 | 0.5277 | 6.3500 | 7.4460 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Li, B.; Guan, W.; Gong, S.; Liu, J.; Cui, J. A Scale-Adaptive Matching Algorithm for Underwater Acoustic and Optical Images. Sensors 2020, 20, 4226. https://doi.org/10.3390/s20154226
Liu J, Li B, Guan W, Gong S, Liu J, Cui J. A Scale-Adaptive Matching Algorithm for Underwater Acoustic and Optical Images. Sensors. 2020; 20(15):4226. https://doi.org/10.3390/s20154226
Chicago/Turabian StyleLiu, Jun, Benyuan Li, Wenxue Guan, Shenghua Gong, Jiaxin Liu, and Junhong Cui. 2020. "A Scale-Adaptive Matching Algorithm for Underwater Acoustic and Optical Images" Sensors 20, no. 15: 4226. https://doi.org/10.3390/s20154226
APA StyleLiu, J., Li, B., Guan, W., Gong, S., Liu, J., & Cui, J. (2020). A Scale-Adaptive Matching Algorithm for Underwater Acoustic and Optical Images. Sensors, 20(15), 4226. https://doi.org/10.3390/s20154226