Human Occupancy Detection via Passive Cognitive Radio


 and
and
Abstract
:1. Introduction
- Adaptive spectrum sensing via a reconfigurable CR is applied to HOD.
- Online training enhances the system robustness for real-time performance.
- Results demonstrate traditional classifiers achieve a better performance for human detection, using much less training samples and number of frequency bands than the CNN.
2. Background
2.1. Related Work
2.1.1. Human Occupancy Detection
2.1.2. Cognitive Radio
2.1.3. Feature Selection
2.2. Advantages
3. Methodologies
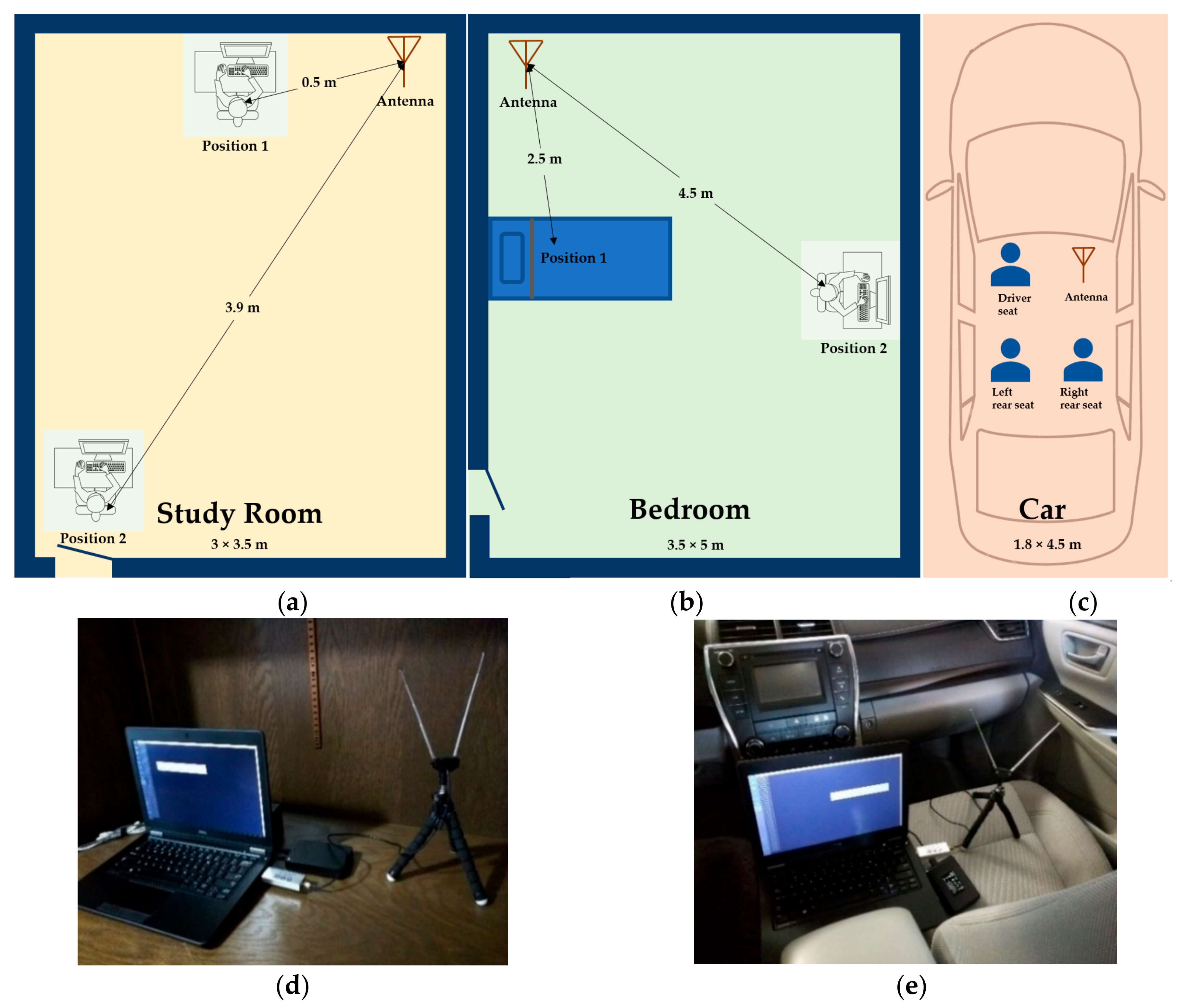
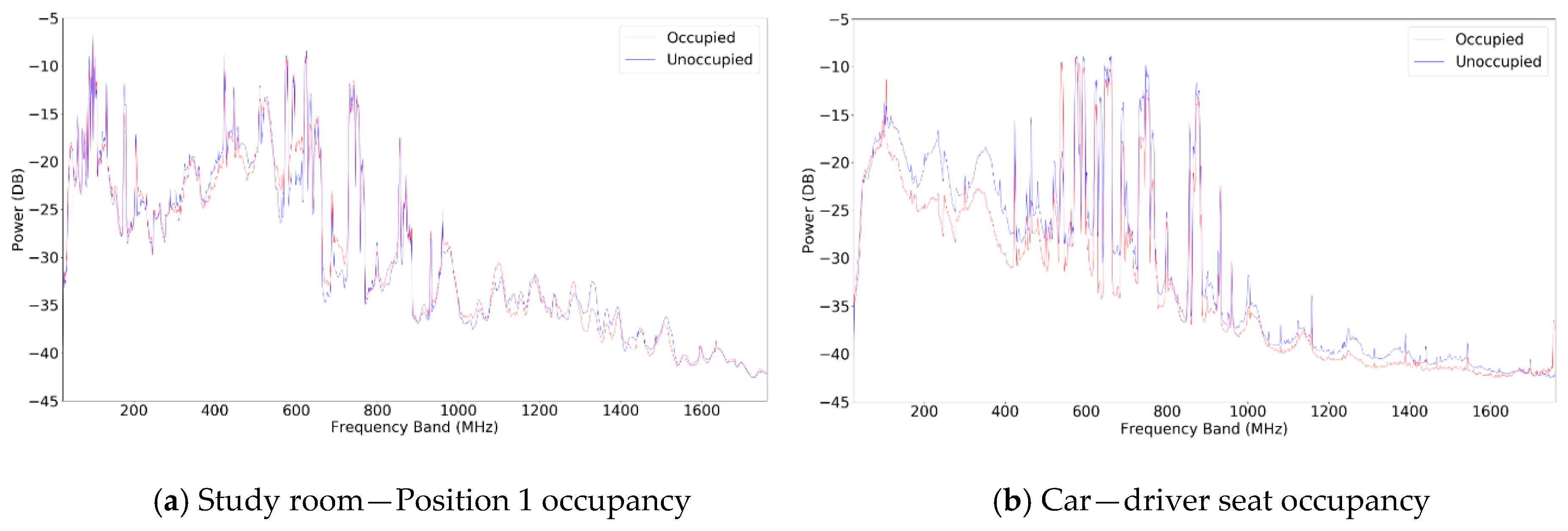
3.1. RF Signal Acquisition
3.2. RF Signal Pre-Processing
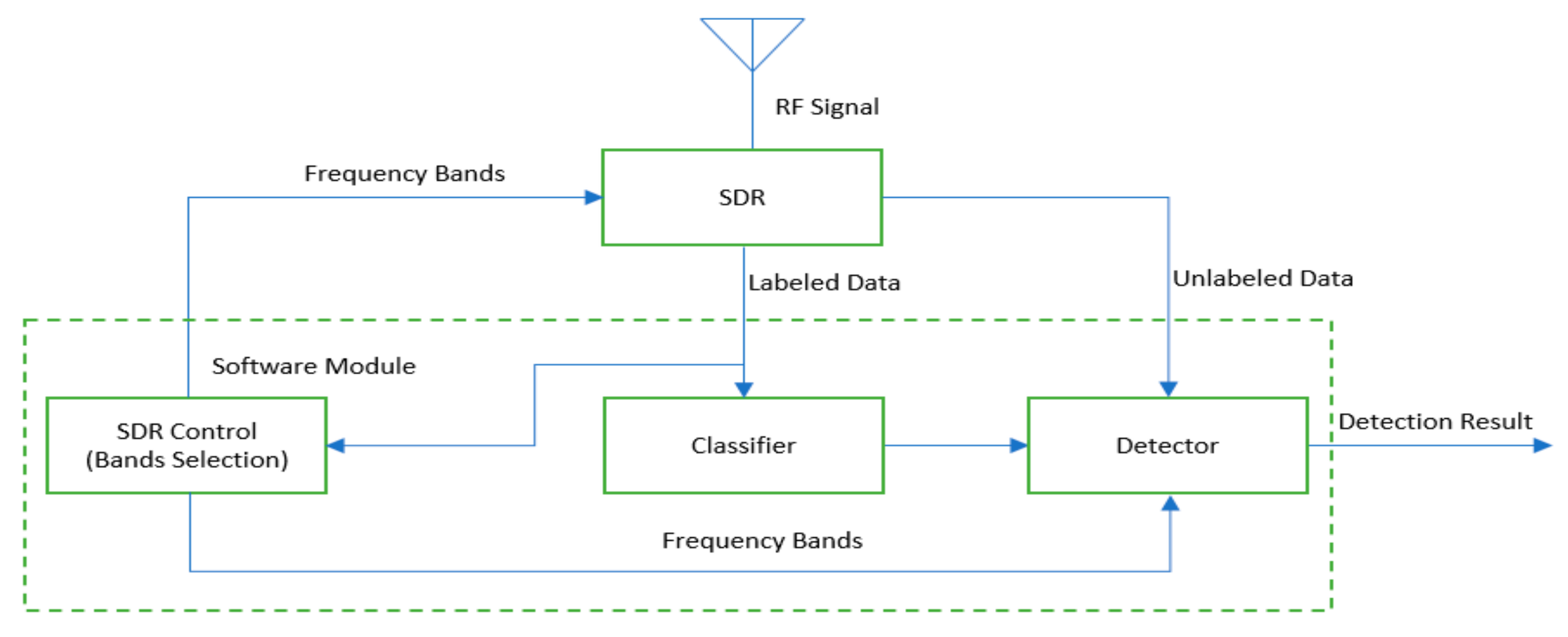
3.3. Adaptive Spectrum Sensing
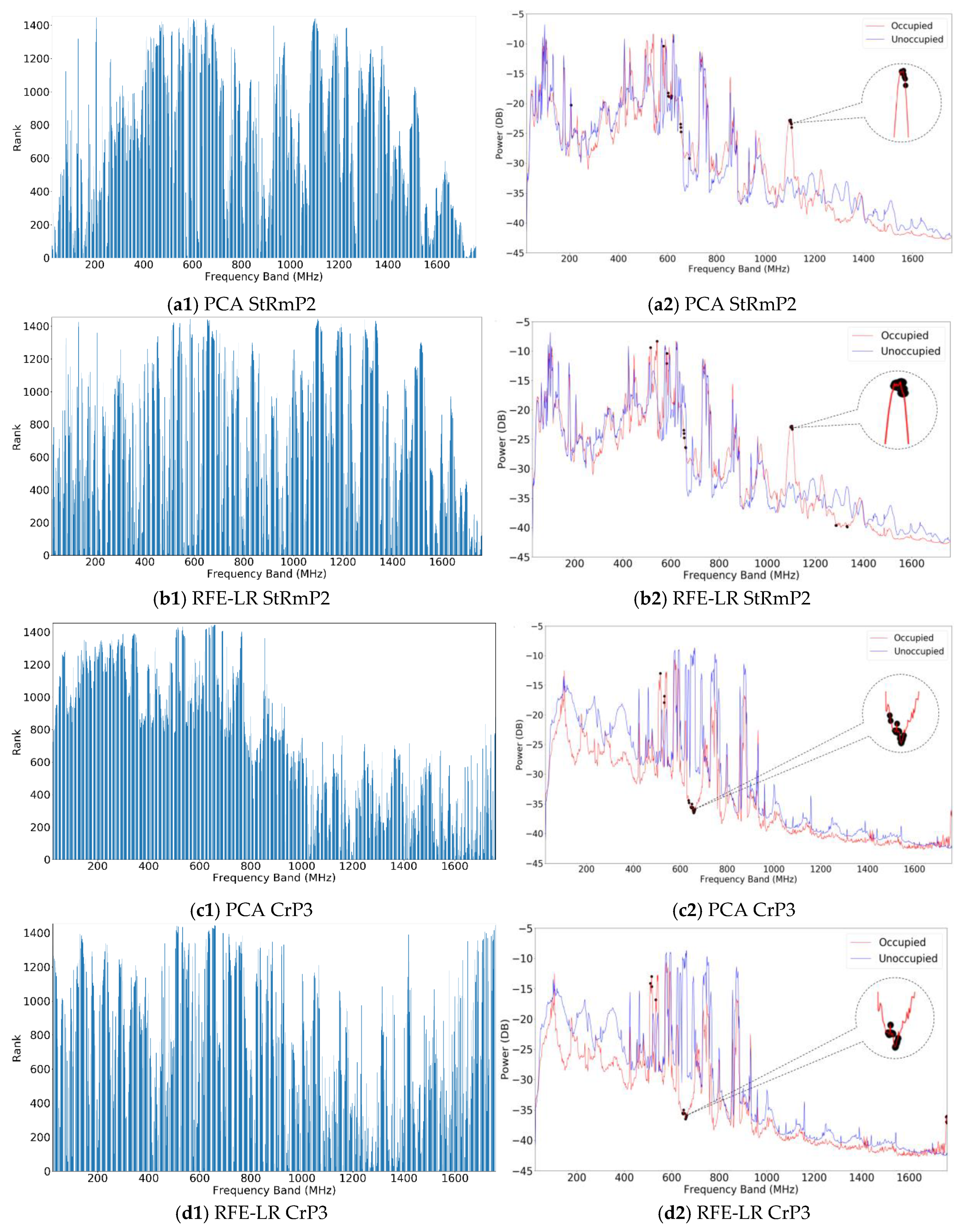
3.3.1. PCA-Based Frequency Band Selection
3.3.2. RFE-LR-Based Frequency Band Selection
3.4. Classifier Training
4. Experimental Results
4.1. Frequency Bands Selected
4.2. Performance in Different Locations
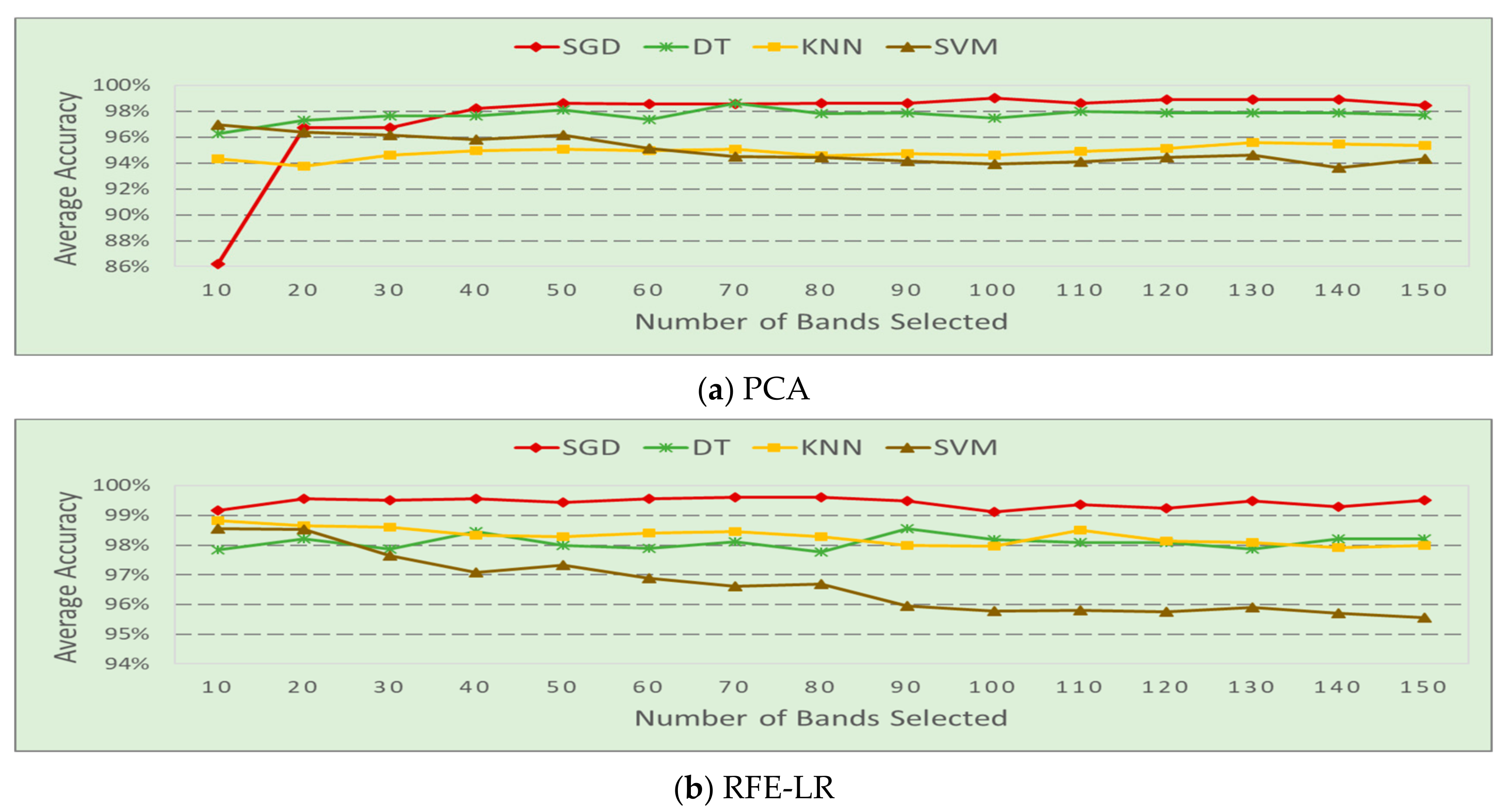
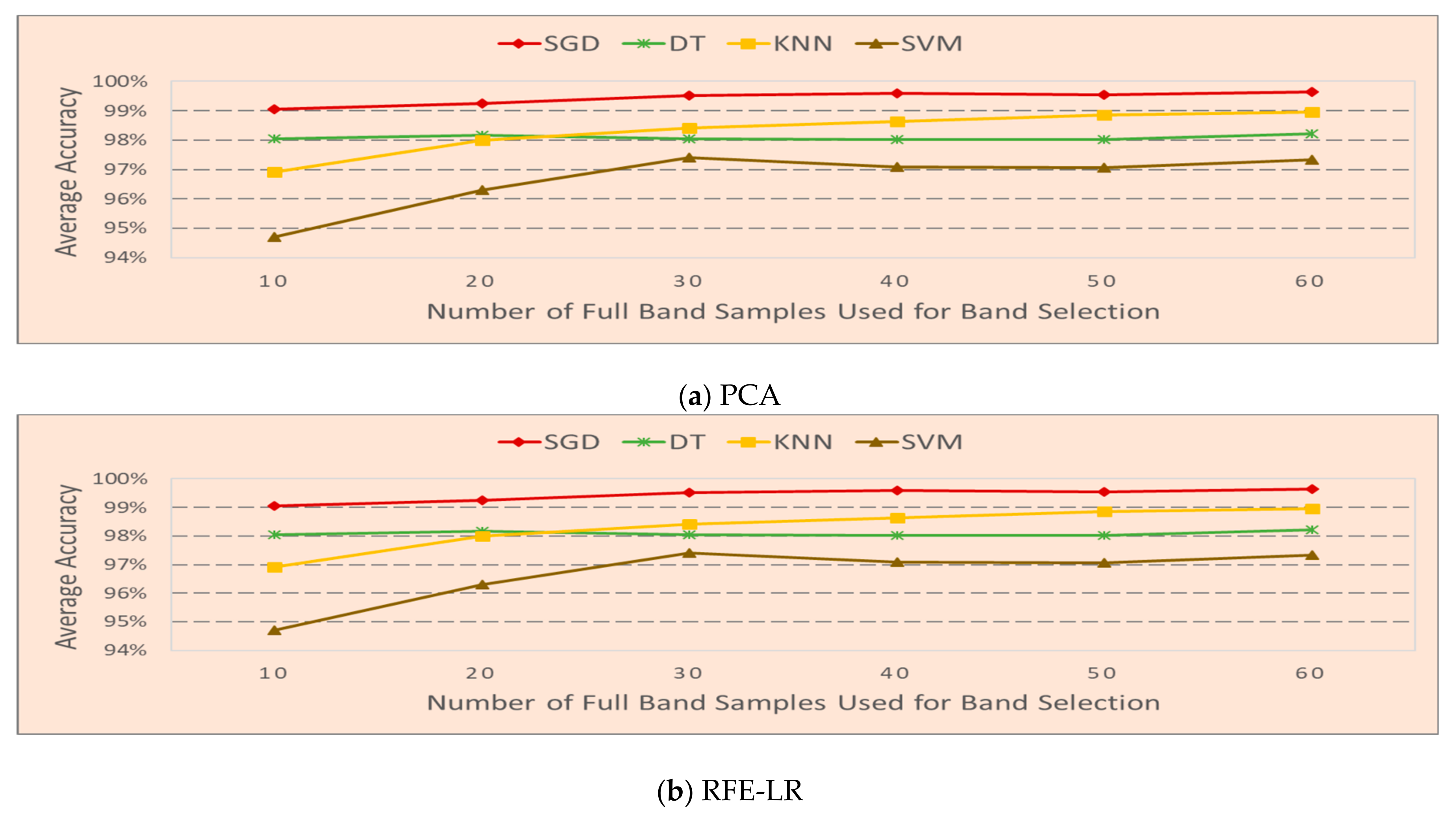
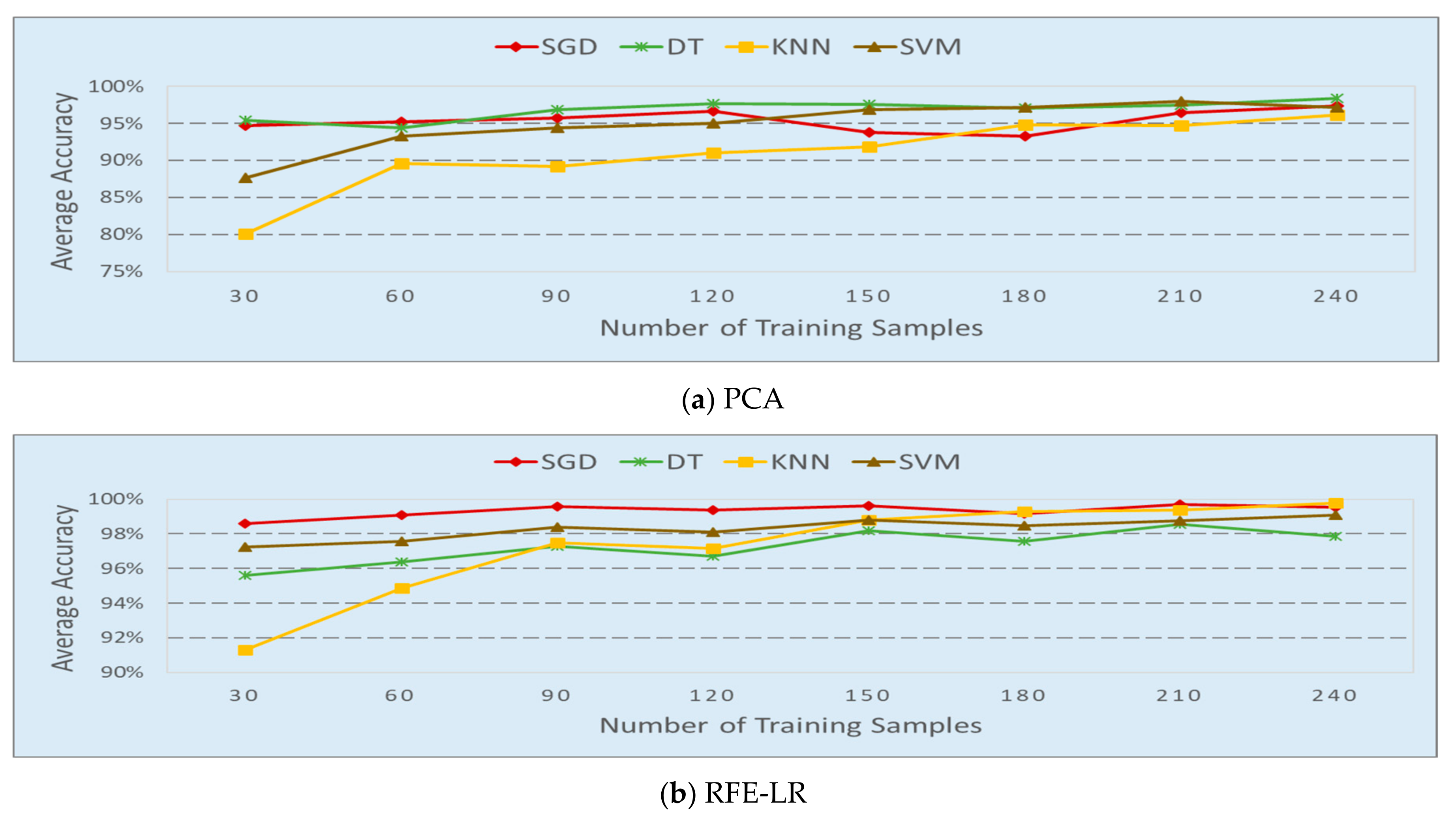
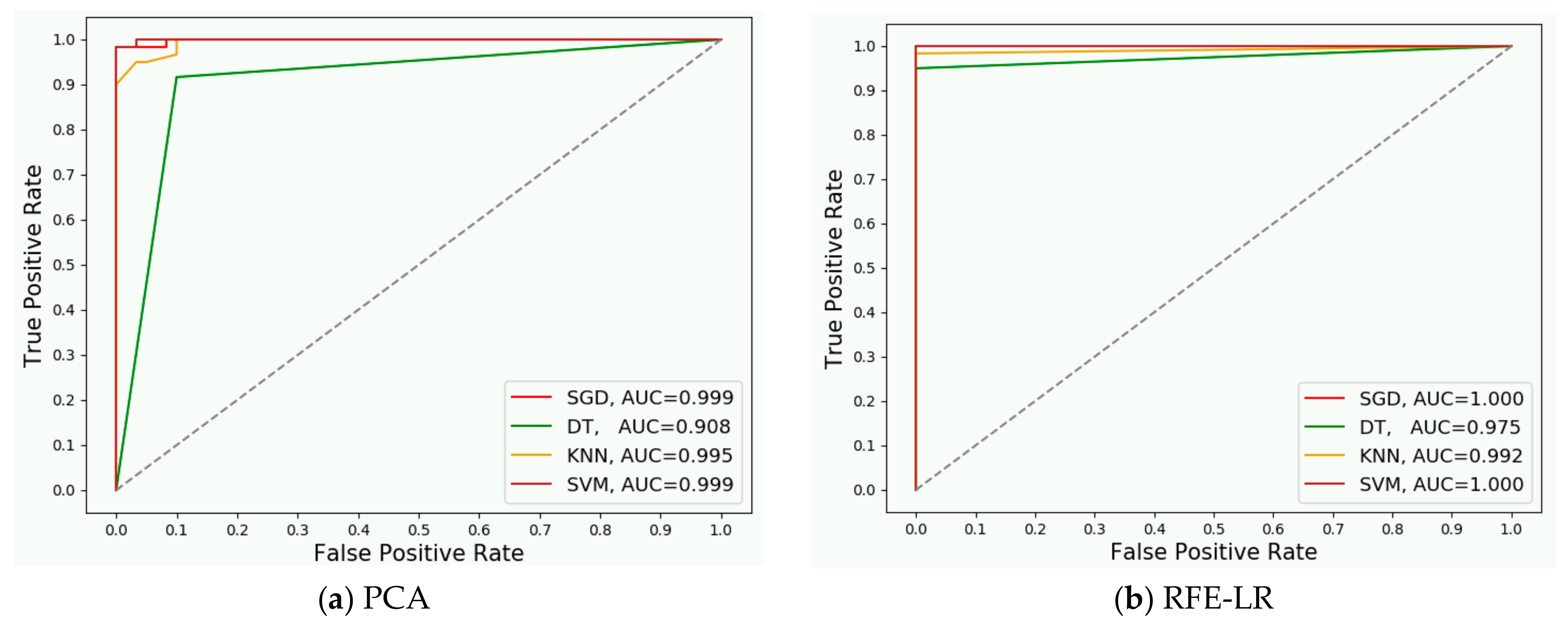
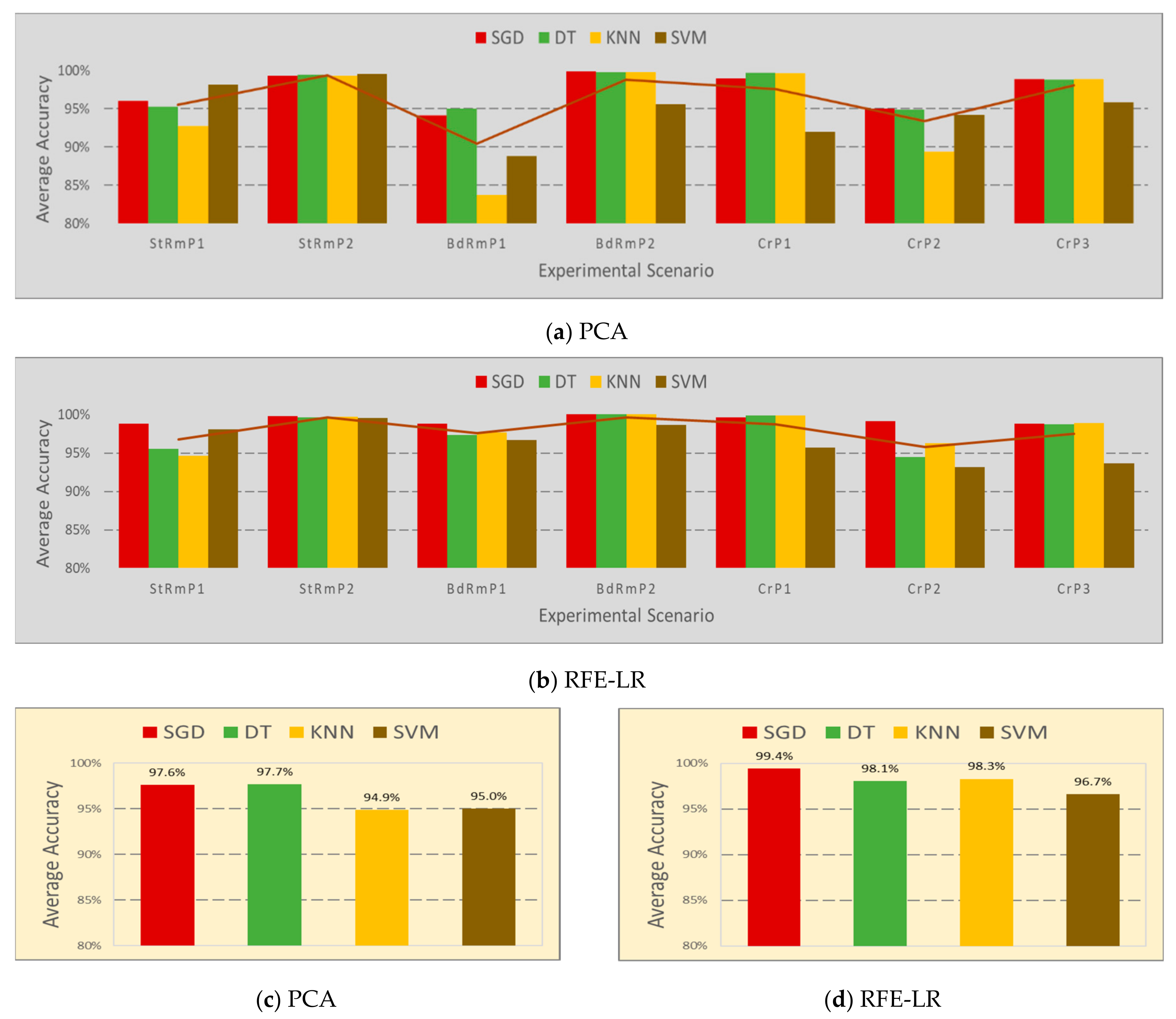
4.3. Performance of Different Band Selection Algorithms
4.4. Storage and Processing Evaluation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abd-Almageed, W.; Hussein, M.; Abdelkader, M.; Davis, L. Real-Time Human Detection and Tracking from Mobile Vehicles. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Seattle, WA, USA, 30 September–3 October 2007; pp. 149–154. [Google Scholar]
- Ikuta, K.; Kage, H.; Seki, M.; Hirai, T. Human intruder detection with Leaky Coaxial cables for wide area surveillance system. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, AK, USA, 9–12 October 2011; pp. 103–108. [Google Scholar]
- Watada, J.; Musaand, Z.B. Tracking human motions for security system. In Proceedings of the SICE Annual Conference, Tokyo, Japan, 20–22 August 2008; pp. 3344–3349. [Google Scholar]
- Zeng, C.; Ma, H. Human detection using multi-camera and 3D scene knowledge. In Proceedings of the 18th IEEE International Conference on Image Processing, Brussels, Belgium, 11–14 September 2011; pp. 1793–1796. [Google Scholar]
- Taipalus, T.; Ahtiainen, J. Human detection and tracking with knee-high mobile 2D LIDAR. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Phuket, Thailand, 7–11 December 2011; pp. 1672–1677. [Google Scholar]
- Chen, V. Detection and analysis of human motion by radar. In Proceedings of the IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–4. [Google Scholar]
- Chang, S.; Mitsumoto, N.; Burdick, J.W. An algorithm for UWB radar-based human detection. In Proceedings of the IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–6. [Google Scholar]
- Kazuhiko, H.; Nobuyuki, Y.; Katsuya, M. Human Occupancy Detection Method and System for Implementing the Same. U.S. Patent 5,703,367, 30 December 1997. [Google Scholar]
- Sonia, S.; Tripathi, A.M.; Baruah, R.D.; Nair, S.B. Ultrasonic sensor-based human detector using one-class classifiers. In Proceedings of the IEEE International Conference on Evolving and Adaptive Intelligent Systems (EAIS), Douai, France, 1–3 December 2015; pp. 1–6. [Google Scholar]
- Van Eeden, W.D.; de Villiers, J.P.; Berndt, R.J.; Nel, W.A.J.; Blasch, E. Micro-Doppler radar classification of humans and animals in an operational environment. Expert Syst. Appl. 2018, 102, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Xiao, J.; Feng, Y.; Guo, Q.; Wang, L. Characteristics of an air source heat pump with novel photoelectric sensors during periodic frost–defrost cycles. Appl. Therm. Eng. 2013, 50, 177–186. [Google Scholar] [CrossRef]
- Christiansen, P.; Steen, K.A.; Jørgensen, R.N.; Karstoft, H. Automated Detection and Recognition of Wildlife Using Thermal Cameras. Sensors 2014, 14, 13778–13793. [Google Scholar] [CrossRef]
- Brokešová, J.; Málek, J.; Kolínský, P. Rotaphone, a mechanical seismic sensor system for field rotation rate measurements and its in situ calibration. J. Seismolog. 2012, 16, 603–621. [Google Scholar] [CrossRef]
- Falcone, P.; Colone, F.; Macera, A.; Lombardo, P. Two-dimensional location of moving targets within local areas using WiFi-based multistatic passive radar. IET Radar Sonar Navig. 2014, 8, 123–131. [Google Scholar] [CrossRef]
- Liu, J.; Vakil, A.; Ewing, R.; Shen, X.; Li, J. Human Presence Detection via Deep Learning of Passive Radio Frequency Data. In Proceedings of the IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019; pp. 296–301. [Google Scholar]
- Mrazovac, B.; Todorović, B.M.; Kukolj, D.; Temerinac, M. Device-free human presence detection using frequency domain. In Proceedings of the IEEE 1st International Workshop on Consumer Electronics (CE WS), Novi Sad, Serbia, 11 March 2015; pp. 23–26. [Google Scholar]
- Li, H.; Wan, C.; Shah, R.C.; Sample, A.P.; Patel, S.N. IDAct: Towards Unobtrusive Recognition of User Presence and Daily Activities. In Proceedings of the IEEE International Conference on RFID (RFID), Phoenix, AZ, USA, 2–4 April 2019; pp. 1–8. [Google Scholar]
- Lv, S.; Lu, Y.; Dong, M.; Wang, X.; Dou, Y.; Zhuang, W. Qualitative Action Recognition by Wireless Radio Signals in Human–Machine Systems. IEEE Trans. Hum. Mach. Syst. 2017, 47, 789–800. [Google Scholar] [CrossRef] [Green Version]
- Riyaz, S.; Sankhe, K.; Ioannidis, S.; Chowdhury, K. Deep Learning Convolutional Neural Networks for Radio Identification. IEEE Commun. Mag. 2018, 56, 146–152. [Google Scholar] [CrossRef]
- Zou, H.; Zhou, Y.; Yang, J.; Spanos, C.J. Towards occupant activity driven smart buildings via WiFi-enabled IoT devices and deep learning. Energy Build. 2018, 177, 12–22. [Google Scholar] [CrossRef]
- Edrich, M.; Schroeder, A. Multiband multistatic Passive Radar system for airspace surveillance: A step towards mature PCL implementations. In Proceedings of the International Conference on Radar, Adelaide, Australia, 9–12 September 2013; pp. 218–223. [Google Scholar]
- Pan, S.; Bonde, A.; Jing, J.; Zhang, L.; Zhang, P.; Noh, H.Y. Building Occupancy Estimation System using sparse ambient vibration monitoring. Int. Soc. Opt. Photonics 2014, 9061, 90611O. [Google Scholar]
- Birch, P.M.; Young, R.C.D.; Claret-Tournier, F.; Chatwin, C.R. Automated vehicle occupancy monitoring. Opt. Eng. 2004, 43, 1828–1832. [Google Scholar] [CrossRef]
- Shih, H.-C. A robust occupancy detection and tracking algorithm for the automatic monitoring and commissioning of a building. Energy Build. 2014, 77, 270–280. [Google Scholar] [CrossRef]
- Youssef, K.; Bouchard, L.; Haigh, K.; Silovsky, J.; Thapa, B.; Valk, C.V. Machine Learning Approach to RF Transmitter Identification. IEEE J. Radio Freq. Ident. 2018, 2, 197–205. [Google Scholar] [CrossRef] [Green Version]
- Vasudeva, K.; Çiftler, B.S.; Altamar, A.; Guvenc, I. An experimental study on RSS-based wireless localization with software defined radio. In Proceedings of the WAMICON, Tampa, FL, USA, 6 June 2014; pp. 1–6. [Google Scholar]
- Bonior, J.; Hu, Z.; Guo, T.N.; Qiu, R.C.; Browning, J.P.; Wicks, M.C. Software-Defined-Radio-Based Wireless Tomography: Experimental Demonstration and Verification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 175–179. [Google Scholar] [CrossRef]
- Zhang, T.; Song, T.; Chen, D.; Zhang, T.; Zhuang, J. A Wifi-Based Gesture Recognition System Using Software-Defined Radio. IEEE Access 2019, 7, 131102–131113. [Google Scholar] [CrossRef]
- Jondral, F.K. Software-Defined Radio—Basics and Evolution to Cognitive Radio. EURASIP J. Wireless Commun. Networking 2005, 2005, 652784. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Liu, K.J.R. Advances in cognitive radio networks: A survey. IEEE J. Sel. Top. Signal Process. 2011, 5, 5–23. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Pham, K.; Blasch, E.; Nguyen, T.M.; Shen, D.; Tian, X. Cognitive radio unified Spectral efficiency and Energy Efficiency trade-off analysis. In Proceedings of the MILCOM 2015–2015 IEEE Military Communications Conference, Tampa, FL, USA, 26–28 October 2015; pp. 244–249. [Google Scholar]
- Liu, X.; Zhang, X. NOMA-Based Resource Allocation for Cluster-Based Cognitive Industrial Internet of Things. IEEE Trans. Ind. Inf. 2020, 16, 5379–5388. [Google Scholar] [CrossRef]
- Shi, Y.; Davaslioglu, K.; Sagduyu, Y.; Headley, W.; Fowler, M.; Green, G. Deep Learning for RF Signal Classification in Unknown and Dynamic Spectrum Environments. In Proceedings of the IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Newark, NJ, USA, 11–14 November 2019; pp. 1–10. [Google Scholar]
- Tumuluru, V.K.; Wang, P.; Niyato, D. Channel Status Prediction for Cognitive Radio Networks. Wirel. Commun. Mob. Comput. 2012, 12, 862–874. [Google Scholar] [CrossRef]
- Lin, Y.; Wang, C.; Wang, J.; Duo, Z. A Novel Dynamic Spectrum Access Framework Based on Reinforcement Learning for Cognitive Radio Sensor Networks. Sensors 2016, 16, 1675. [Google Scholar] [CrossRef]
- Ranganathan, R.; Qiu, R.; Hu, Z.; Hou, S.; Pazos-Revilla, M.; Zheng, G.; Chen, Z.; Guo, N. Cognitive Radio for Smart Grid: Theory, Algorithms, and Security. Int. J. Digital Multimedia Broadcast. 2011, 2011, 502087. [Google Scholar] [CrossRef] [Green Version]
- Joshi, G.; Nam, S.Y.; Kim, S. Cognitive Radio Wireless Sensor Networks: Applications, Challenges and Research Trends. Sensors 2013, 13, 11196–11228. [Google Scholar] [CrossRef] [Green Version]
- Majumder, U.K.; Blasch, E.P.; Garren, D.A. Deep Learning for Radar and Communications Automatic Target Recognition; Artech House: Norwood, MS, USA, 2020; ISBN 978-1-63081-637-7. [Google Scholar]
- Vanhoy, G.; Teku, N.; Bose, T. Feature selection for cyclostationary-based signal classification. In Proceedings of the International Telemetering Conference, Las Vegas, NV, USA, 23–26 October 2017. [Google Scholar]
- Wang, X.; Zhang, Y.; Zhang, H.; Wei, X.; Wang, G. Identification and authentication for wireless transmission security based on RF-DNA fingerprint. EURASIP J. Wireless Commun. Network. 2019, 2019, 230. [Google Scholar] [CrossRef] [Green Version]
- Galván-Tejada, C.E.; García-Vázquez, J.P.; Brena, R.F. Magnetic Field Feature Extraction and Selection for Indoor Location Estimation. Sensors 2014, 14, 11001–11015. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, C.; Wang, Y.; Yin, Z. Energy-efficiency opportunistic spectrum allocation in cognitive wireless sensor network. EURASIP J. Wireless Commun. Network. 2018, 2018, 13. [Google Scholar] [CrossRef] [Green Version]
- Song, X.; Yin, C.; Liu, D.; Zhang, R. Spatial Throughput Characterization in Cognitive Radio Networks with Threshold-Based Opportunistic Spectrum Access. IEEE J. Sel. Areas Commun. 2014, 32, 2190–2204. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Wang, J.; Wu, Q.; Anpalagan, A.; Yao, Y. Opportunistic Spectrum Access in Cognitive Radio Networks: Global Optimization Using Local Interaction Games. IEEE J. Sel. Top. Signal Process. 2012, 6, 180–194. [Google Scholar] [CrossRef] [Green Version]
- Kahler, B.; Blasch, E. Decision-Level Fusion Performance Improvement From Enhanced HRR Radar Clutter Suppression. J. Adv. Inf. Fusion 2011, 6, 101–118. [Google Scholar]
- Hall, J.; Barbeau, M.; Kranakis, E. Enhancing Intrusion Detection in Wireless Networks using Radio Frequency Fingerprinting. In Proceedings of the Communications Internet and Information Technology (CIIT), St. Thomas, VA, USA, 22–24 November 2004. [Google Scholar]
- Tipping, M.E.; Bishop, C.M. Mixtures of Probabilistic Principal Component Analyzers. Neural Comput. 1999, 11, 443–482. [Google Scholar] [CrossRef]
- McCabe, G.P. Principal Variables. Technometrics 1984, 26, 137–144. [Google Scholar] [CrossRef]
- Zhang, C.; Li, Y.; Yu, Z.; Tian, F. Feature selection of power system transient stability assessment based on random forest and recursive feature elimination. In Proceedings of the IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 1264–1268. [Google Scholar]
- Maby, E.; Le Bouquin Jeannes, R.; Liegeok-Chauvel, C.; Gourevitch, B.; Faucon, G. Analysis of auditory evoked potential parameters in the presence of radiofrequency fields using a support vector machines method. Med. Biol. Eng. Comput. 2004, 42, 562–568. [Google Scholar] [CrossRef]
- Zhu, C.; Byrd, R.H.; Lu, P.; Nocedal, J. Algorithm 778: L-BFGS-B: Fortran Subroutines for Large-Scale Bound-Constrained Optimization. ACM Trans. Math. Softw. 1997, 23, 550–560. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Description |
|---|---|
| SDR | RTL2832U |
| Locations | a study room, a bedroom, and a car |
| Data Labels | 0: Unoccupied 1: Occupied |
| Frequency Range | 24 MHz–1760 MHz |
| Scanning Step | 1.2 MHz |
| Bandwidth | 1.2 MHz |
| Sampling Rate | 2.4 MHz |
| Duration | 2 ms per frequency band |
| Number of Frequency Bands | 1447 |
| Scenario | Number of Full Band Samples | Number of Bands Selected | Classifier |
|---|---|---|---|
| StRmP1, … CrP3 | (10, 20, … 60) | (10, 20, … 150) | SGD, SVM, KNN, DT |
| (a) PCA | ||||||
| StRmP1 (MHz) | StRmP2 (MHz) | BdRmP1 (MHz) | BdRmP2 (MHz) | CrP1 (MHz) | CrP2 (MHz) | CrP3 (MHz) |
| 180.0 | 206.4 | 1755.6 | 1755.6 | 637.2 | 517.2 | 531.6 |
| 930.0 | 1101.6 | 1758.0 | 1756.8 | 636.0 | 513.6 | 532.8 |
| 178.8 | 583.2 | 1756.8 | 1758.0 | 514.8 | 625.2 | 542.4 |
| 614.4 | 1102.8 | 1759.2 | 1759.2 | 537.6 | 626.4 | 646.8 |
| 603.6 | 1104.0 | 1754.4 | 621.6 | 516.0 | 624.0 | 645.6 |
| 612.0 | 1105.2 | 583.2 | 626.4 | 634.8 | 742.8 | 648.0 |
| 604.8 | 1100.4 | 582.0 | 625.2 | 538.8 | 741.6 | 534.0 |
| 602.4 | 1099.2 | 584.4 | 1754.4 | 638.4 | 740.4 | 537.6 |
| 177.6 | 654.0 | 580.8 | 622.8 | 584.4 | 692.4 | 649.2 |
| 176.4 | 614.4 | 452.4 | 624.0 | 633.6 | 693.6 | 636.0 |
| (b) RFE-LR | ||||||
| StRmP1 (MHz) | StRmP2 (MHz) | BdRmP1 (MHz) | BdRmP2 (MHz) | CrP1 (MHz) | CrP2 (MHz) | CrP3 (MHz) |
| 102.0 | 132.0 | 103.2 | 516.0 | 540.0 | 463.2 | 531.6 |
| 206.4 | 583.2 | 109.2 | 517.2 | 541.2 | 464.4 | 532.8 |
| 216.0 | 654.0 | 486.0 | 552.0 | 542.4 | 583.2 | 645.6 |
| 396.0 | 660.0 | 488.4 | 553.2 | 580.8 | 597.6 | 649.2 |
| 505.2 | 1098.0 | 544.8 | 554.4 | 582.0 | 618.0 | 658.8 |
| 513.6 | 1099.2 | 595.2 | 649.2 | 583.2 | 764.4 | 660.0 |
| 649.2 | 1100.4 | 624.0 | 650.4 | 634.8 | 768.0 | 661.2 |
| 650.4 | 1101.6 | 633.6 | 655.2 | 636.0 | 770.4 | 662.4 |
| 1335.6 | 1285.2 | 798.0 | 660.0 | 637.2 | 798.0 | 1755.6 |
| 1336.8 | 1286.4 | 858.0 | 661.2 | 638.4 | 960.0 | 1756.8 |
| (a) PCA | ||||
| Scenario | Precision | Recall | F1 | Accuracy |
| StRmP1 | 98.33% | 98.33% | 98.33% | 98.33% |
| StRmP2 | 100.00% | 100.00% | 100.00% | 100.00% |
| BdRmP1 | 91.67% | 91.67% | 91.67% | 91.67% |
| BdRmP2 | 100.00% | 100.00% | 100.00% | 100.00% |
| CrP1 | 100.00% | 100.00% | 100.00% | 100.00% |
| CrP2 | 96.61% | 95.00% | 95.80% | 95.83% |
| CrP3 | 100.00% | 100.00% | 100.00% | 100.00% |
| (b) RFE-LR | ||||
| Scenario | Precision | Recall | F1 | Accuracy |
| StRmP1 | 100.00% | 100.00% | 100.00% | 100.00% |
| StRmP2 | 100.00% | 96.67% | 98.31% | 98.33% |
| BdRmP1 | 100.00% | 96.67% | 98.31% | 98.33% |
| BdRmP2 | 100.00% | 100.00% | 100.00% | 100.00% |
| CrP1 | 100.00% | 100.00% | 100.00% | 100.00% |
| CrP2 | 100.00% | 98.33% | 99.16% | 99.17% |
| CrP3 | 100.00% | 100.00% | 100.00% | 100.00% |
| (a) PCA | ||||
| Scenario | SGD | DT | KNN | SVM |
| StRmP1 | 90.48% | 95.65% | 90.09% | 100.00% |
| StRmP2 | 100.00% | 100.00% | 99.16% | 100.00% |
| BdRmP1 | 93.75% | 96.67% | 87.80% | 92.31% |
| BdRmP2 | 100.00% | 100.00% | 100.00% | 100.00% |
| CrP1 | 100.00% | 100.00% | 100.00% | 94.49% |
| CrP2 | 96.67% | 98.31% | 92.86% | 95.24% |
| CrP3 | 100.00% | 100.00% | 100.00% | 97.56% |
| (b) RFE-LR | ||||
| Scenario | SGD | DT | KNN | SVM |
| StRmP1 | 99.17% | 92.56% | 91.89% | 98.36% |
| StRmP2 | 100.00% | 99.16% | 100.00% | 100.00% |
| BdRmP1 | 100.00% | 97.52% | 100.00% | 100.00% |
| BdRmP2 | 100.00% | 100.00% | 100.00% | 100.00% |
| CrP1 | 98.31% | 100.00% | 100.00% | 96.77% |
| CrP2 | 100.00% | 91.89% | 97.44% | 96.00% |
| CrP3 | 100.00% | 100.00% | 100.00% | 96.77% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Mu, H.; Vakil, A.; Ewing, R.; Shen, X.; Blasch, E.; Li, J. Human Occupancy Detection via Passive Cognitive Radio. Sensors 2020, 20, 4248. https://doi.org/10.3390/s20154248
Liu J, Mu H, Vakil A, Ewing R, Shen X, Blasch E, Li J. Human Occupancy Detection via Passive Cognitive Radio. Sensors. 2020; 20(15):4248. https://doi.org/10.3390/s20154248
Chicago/Turabian StyleLiu, Jenny, Huaizheng Mu, Asad Vakil, Robert Ewing, Xiaoping Shen, Erik Blasch, and Jia Li. 2020. "Human Occupancy Detection via Passive Cognitive Radio" Sensors 20, no. 15: 4248. https://doi.org/10.3390/s20154248
APA StyleLiu, J., Mu, H., Vakil, A., Ewing, R., Shen, X., Blasch, E., & Li, J. (2020). Human Occupancy Detection via Passive Cognitive Radio. Sensors, 20(15), 4248. https://doi.org/10.3390/s20154248