1.1. NDT Methods
There exist multiple methods to sense corrosion development in reinforcement concrete. These methods can be categorized into two key groups, destructive and non-destructive. Destructive testing (DT) methods require the concrete sample to be damaged to evaluate its properties. Non-destructive testing (NDT) methods evaluate the properties of the concrete sample without causing damage to the sample.
This paper focuses on NDT methods, as these methods have shown capability for fast and reliable structural health diagnosis, with several reported approaches utilizing reinforced concrete structure [
1,
2,
3,
4,
5]. Commonly, passive sensors are being used to perform measurements. These sensors use radio frequency resonance for power and communication [
6,
7,
8,
9]. Most of these sensors utilize an inductive-capacitive tank to improve the sensing mechanism. A downside is that exposure promotes a reaction with time, making the unit unstable over prolonged periods.
Other methods include the galvanostatic pulse method [
10,
11], polarization resistance measurement method [
12,
13], Wenner method of impedance measurement and ground penetrating radar (GPR) [
14,
15]. The Wenner method measures corroded steel reinforcement bars at the concrete surface, where corrosion is identified using low frequency alternating current (AC) waveforms injected across the steel reinforcement and calculated using Faraday’s Laws of electrolysis. An increase in corrosion produces a reduction in impedance over time [
16].
Another NDT method maps direct current (DC) electrical resistivity using embedded sensors [
17]. It is based on the property of materials to oppose the flow of electrical current due to the nature of the medium, its porosity and the electrolyte content [
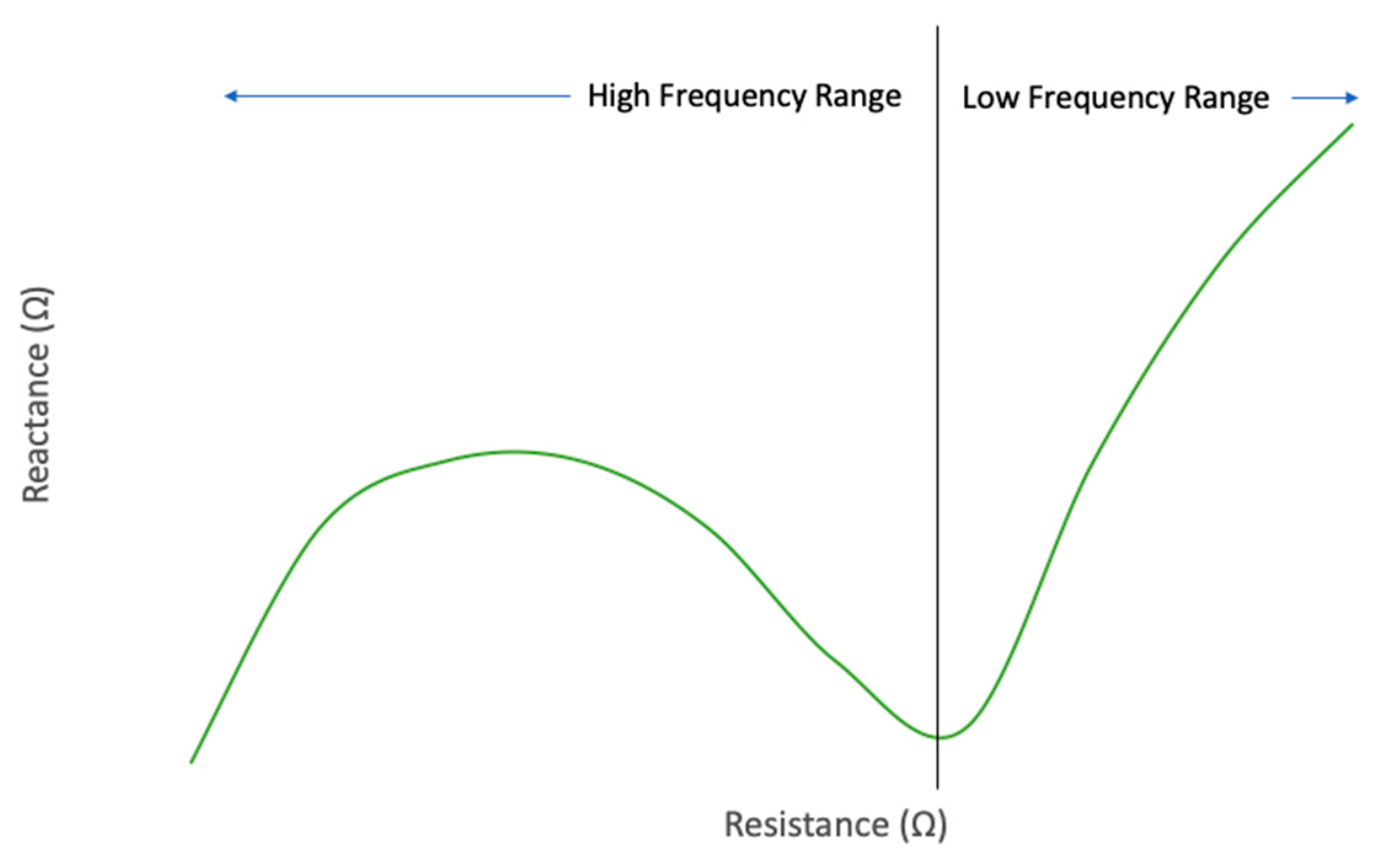
17]. It is not advised to measure concrete resistance through injecting DC into the sensing block, as this will not result in accurate resistance readings, due to polarization effects within the concrete matrix [
18]. As concrete is not a purely resistive medium, utilizing a DC measurement will also induce a reactive electrical component. Injecting an AC signal into concrete reduces reactance and is the preferred method for measuring the resistive component of concrete. Adding functional fillers near their percolation concentration can improve the signal-to-noise ratio (SNR) [
19] (see
Section 2.1 for further details).
Prior to this work, a popular method used to provide measurements at multiple depths was GPR. This method induces radar waves to measure reflected waves off surfaces where there is a change in density/dielectric. This technique uses longer wavelengths as depth increases. GPR is costly, requires sophisticated data analysis and only provides localized monitoring. Internal reflections from the concrete can induce a poor reading and increase SNR as depth increases.
Another method to perform measurements at multiple depths is to use ultrasonic sensors to image the internal structure of concrete. Ultrasonic testing induces high frequency sound waves into the medium and measures reflected waves at the surface of the sensor [
20,
21,
22]. This method has been used with multi-sensor arrangements. Due to the shorter wavelengths than GPR, it is limited to shallow depth measurements.
The goal of this study was to develop a miniature, multi-electrode, non-destructive embedded sensor to monitor electrical resistivity of concrete by means of measurements at multiple depths at a low cost [
23]. In this study, we selected concrete polarization resistivity measurement as a suitable method of infrastructure health monitoring, as it is accurate, non-destructive and suitable for miniaturization [
24,
25,
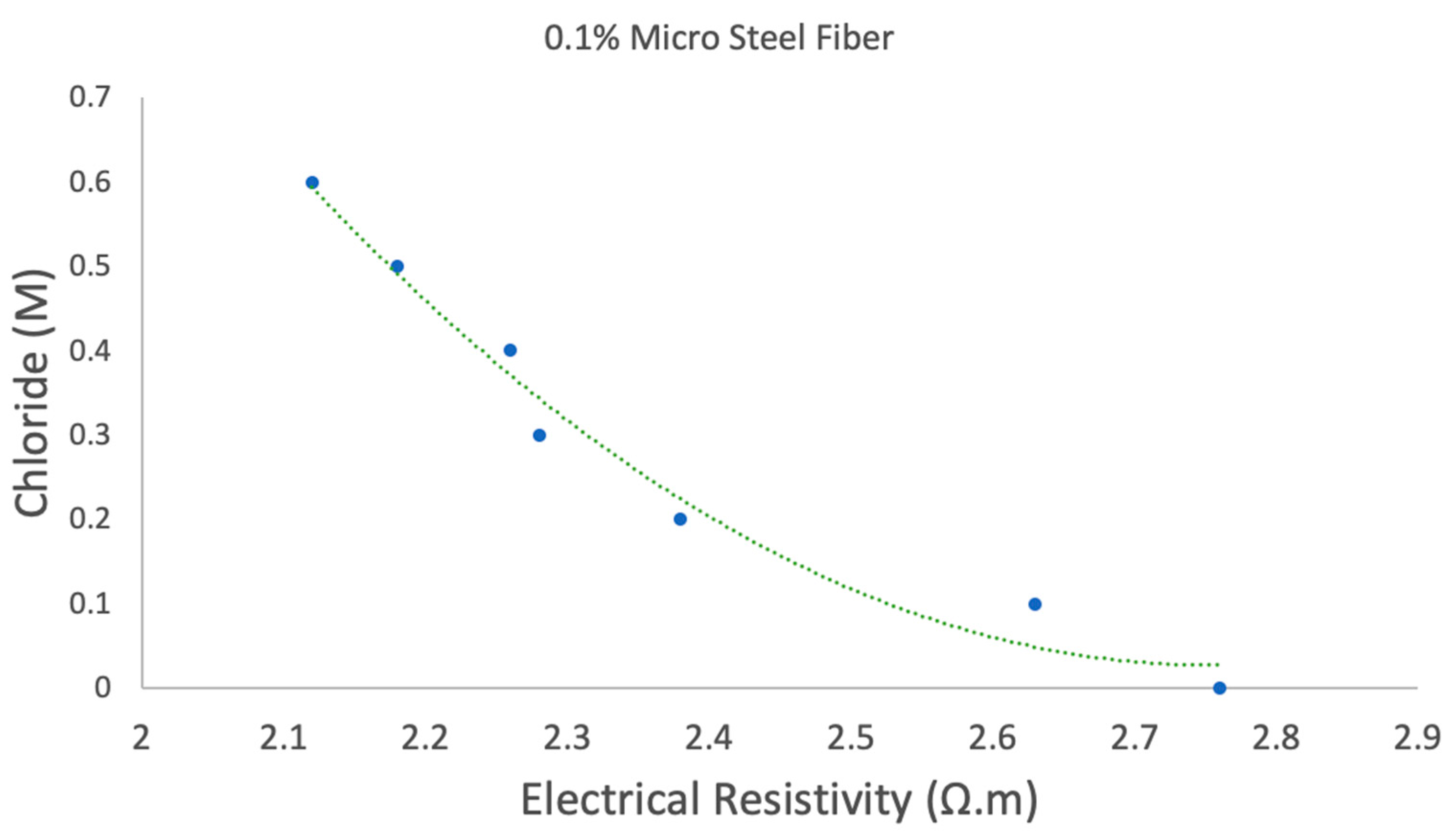
26]. Research has found that the electrical resistivity of concrete is an effective parameter to evaluate the risk of concrete corrosion [
27].
1.2. Embedded Devices
Previous attempts to develop low-power embedded devices for sensing concrete corrosion have been reported in the literature. From these attempts, it was found that most embedded sensors do not optimize peak power operation. The DC electrical resistivity method uses embedded sensors relying on injecting DC current to measure resistance. Peak power consumption may not be optimized, as the embedded sensor measures a higher resistance than an AC injecting embedded sensor, therefore requiring higher current injection. Embedded wireless sensors require an inductively coupled external power supply connection, and they have been reported as consuming as high as 150 mA of current at 12 V during peak power operation [
28].
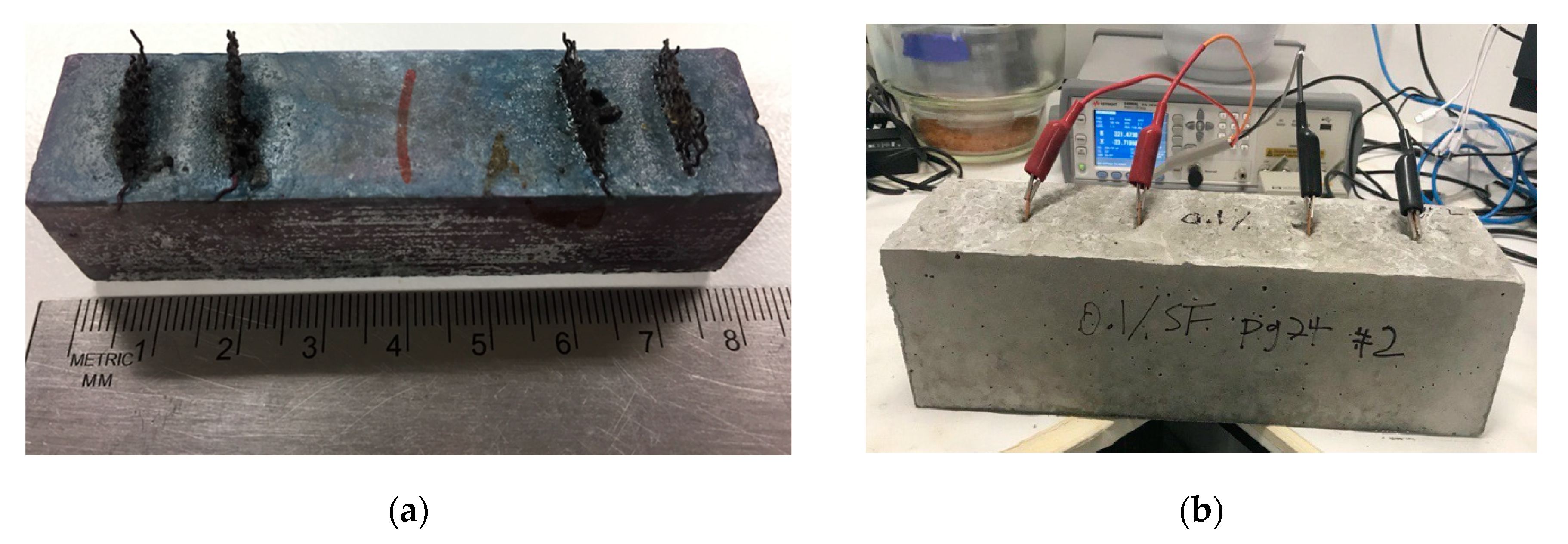
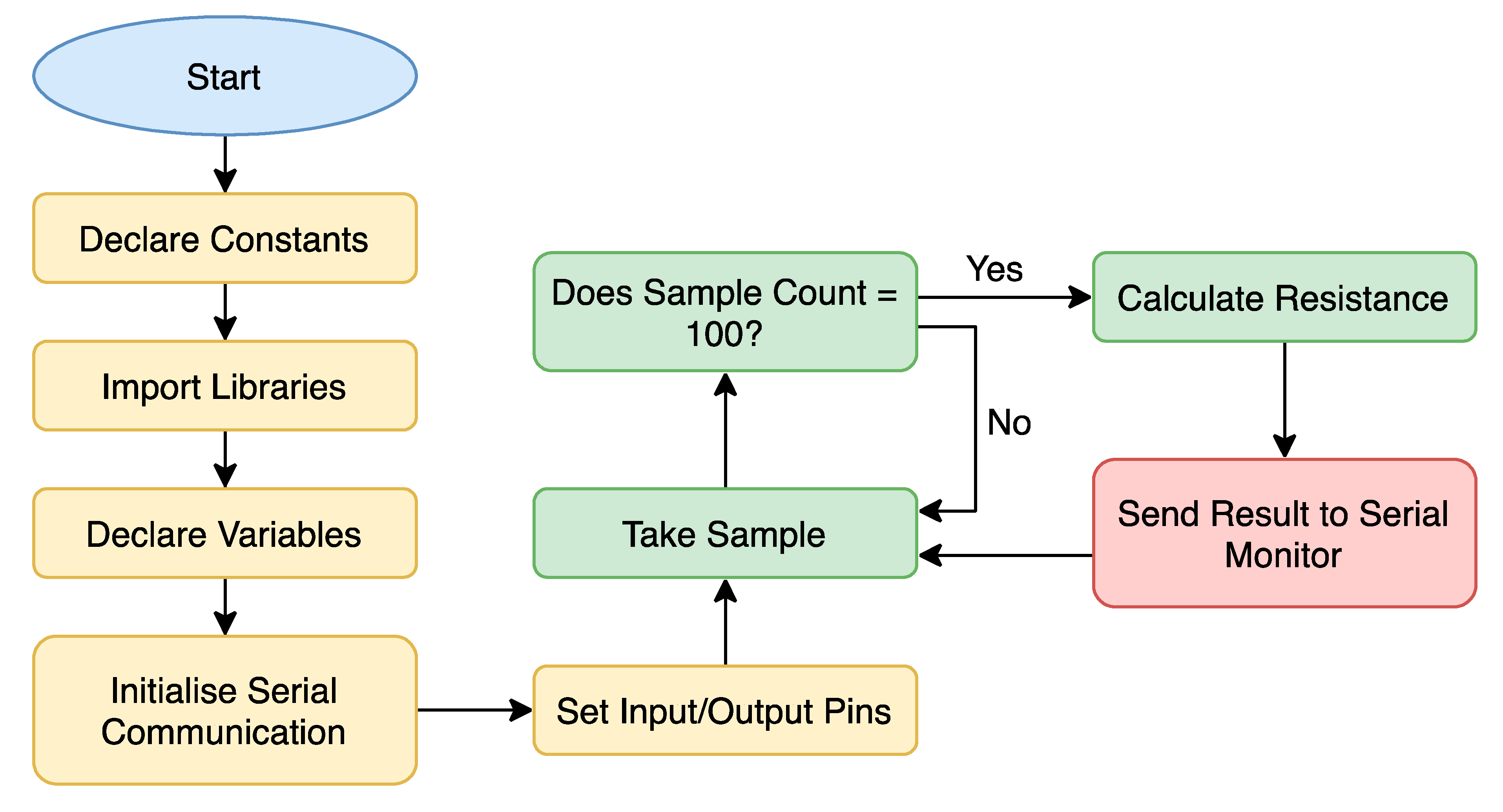
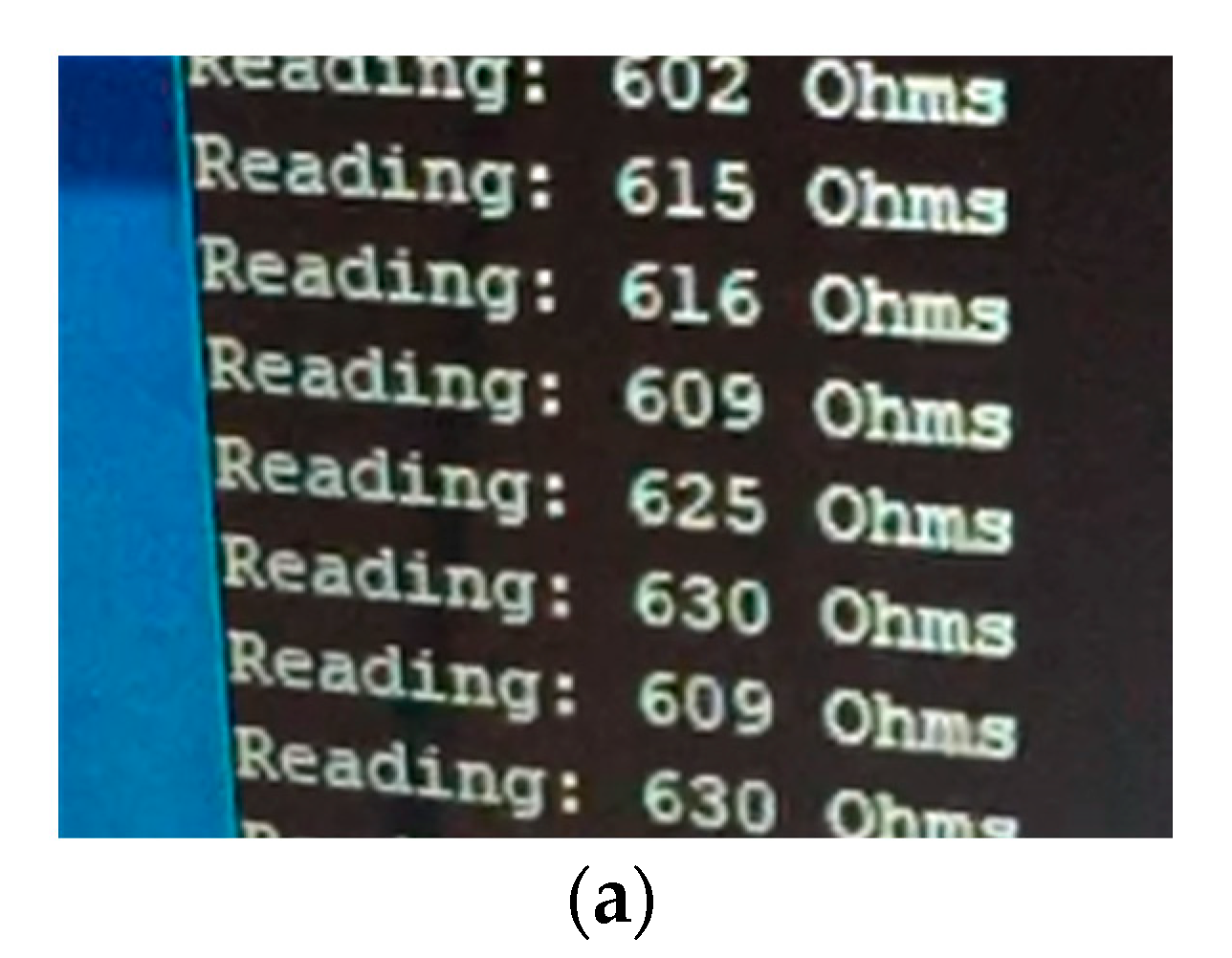
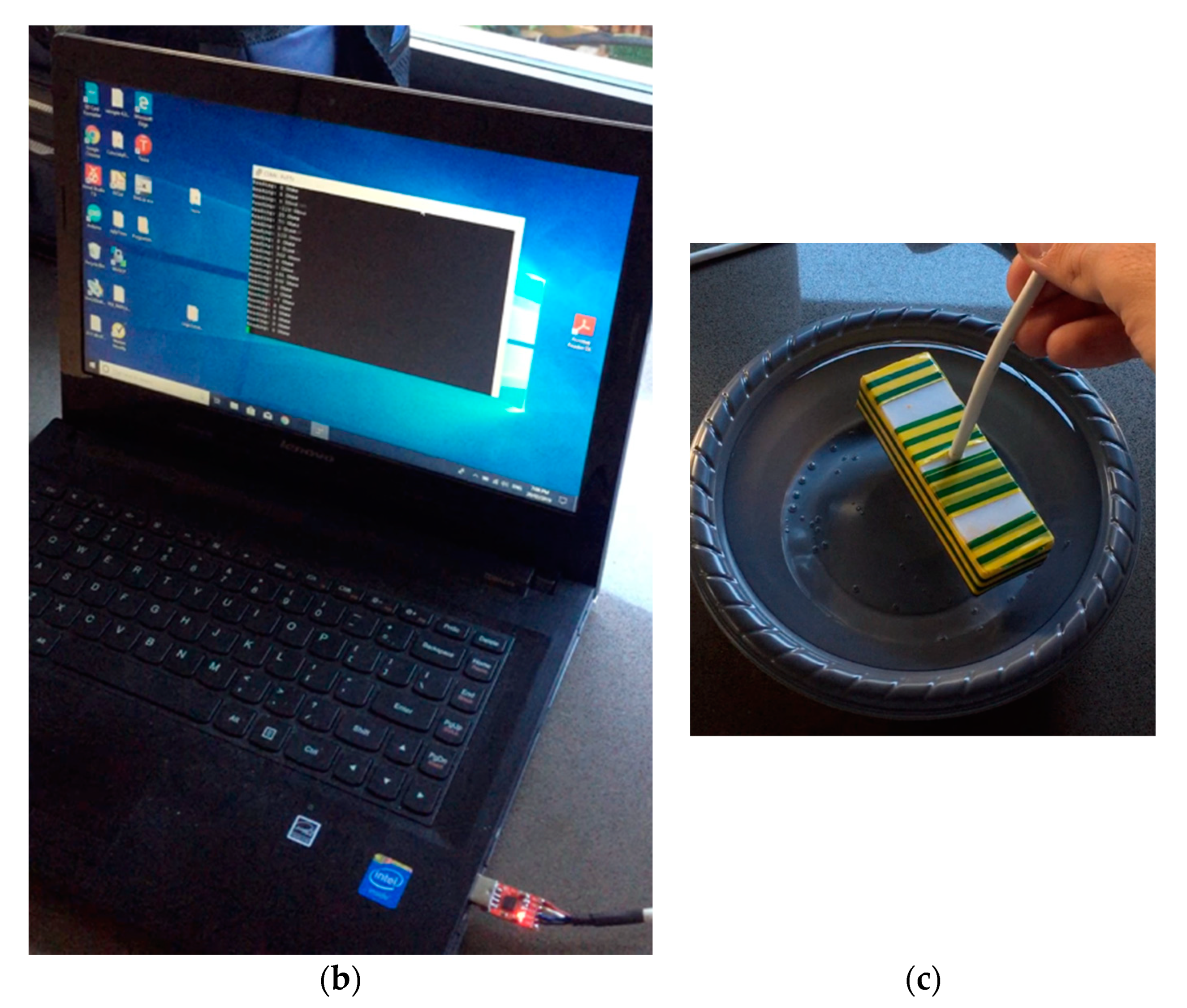
This paper presents an effective, low-cost, miniature, resistance measurement device for the detection of concrete corrosion, utilizing a four-probe sensing technique [
29], with a highly stable, efficient, fixed frequency AC waveform for injecting current across the external probes. The internal probes monitor and sense the voltage, and an internal algorithm calculates the effective resistance of the sample under test. Peak current consumption of 8 mA from a 3.3-V source effectively shows the device’s competitively low peak power consumption during operation, allowing multiple sensors to be embedded off a single power supply. This opens the potential for a three-dimensional measurement of concrete on different axes running at peak power for continuous chloride ingress monitoring, showing the novelty of the device.
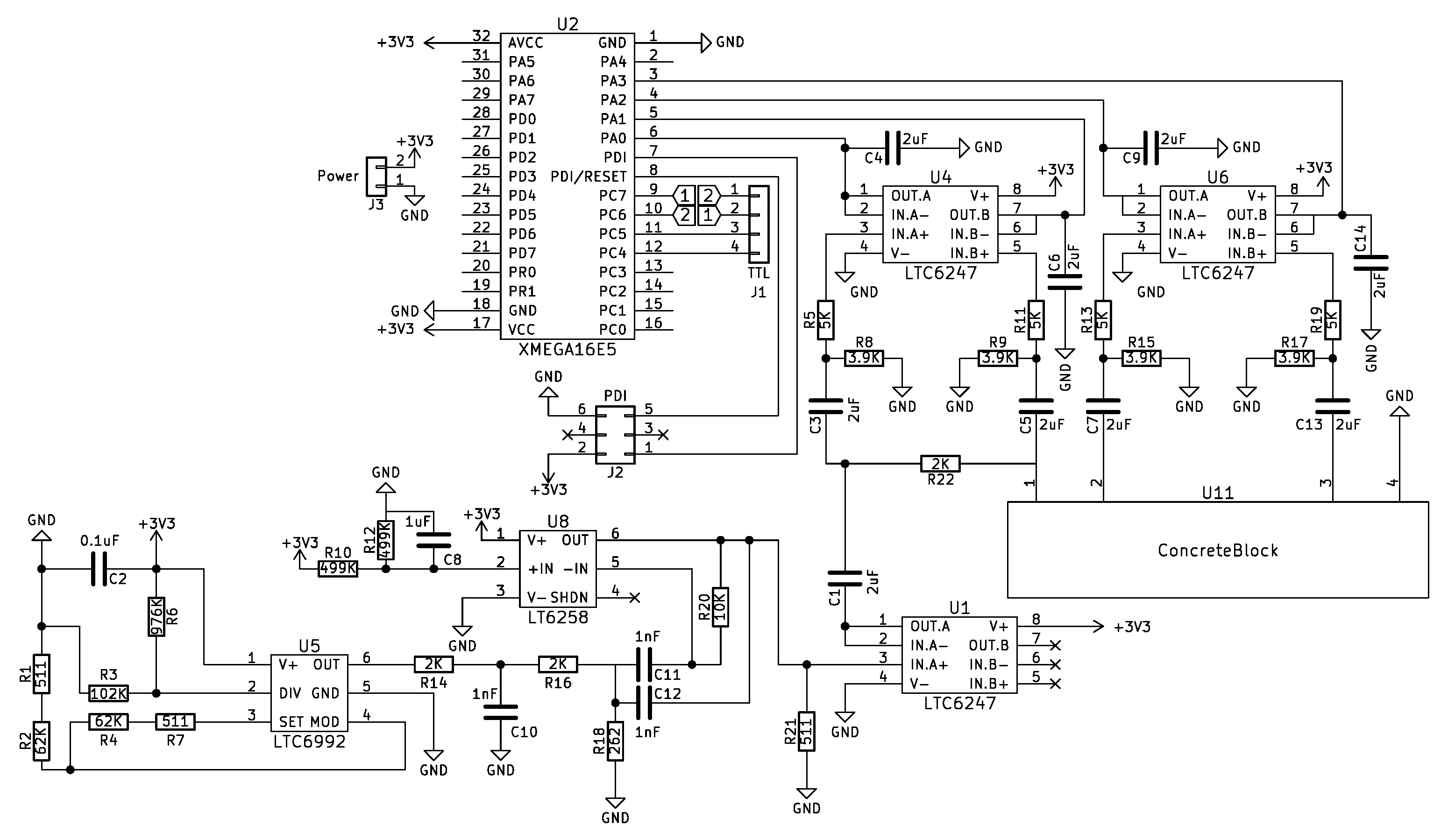
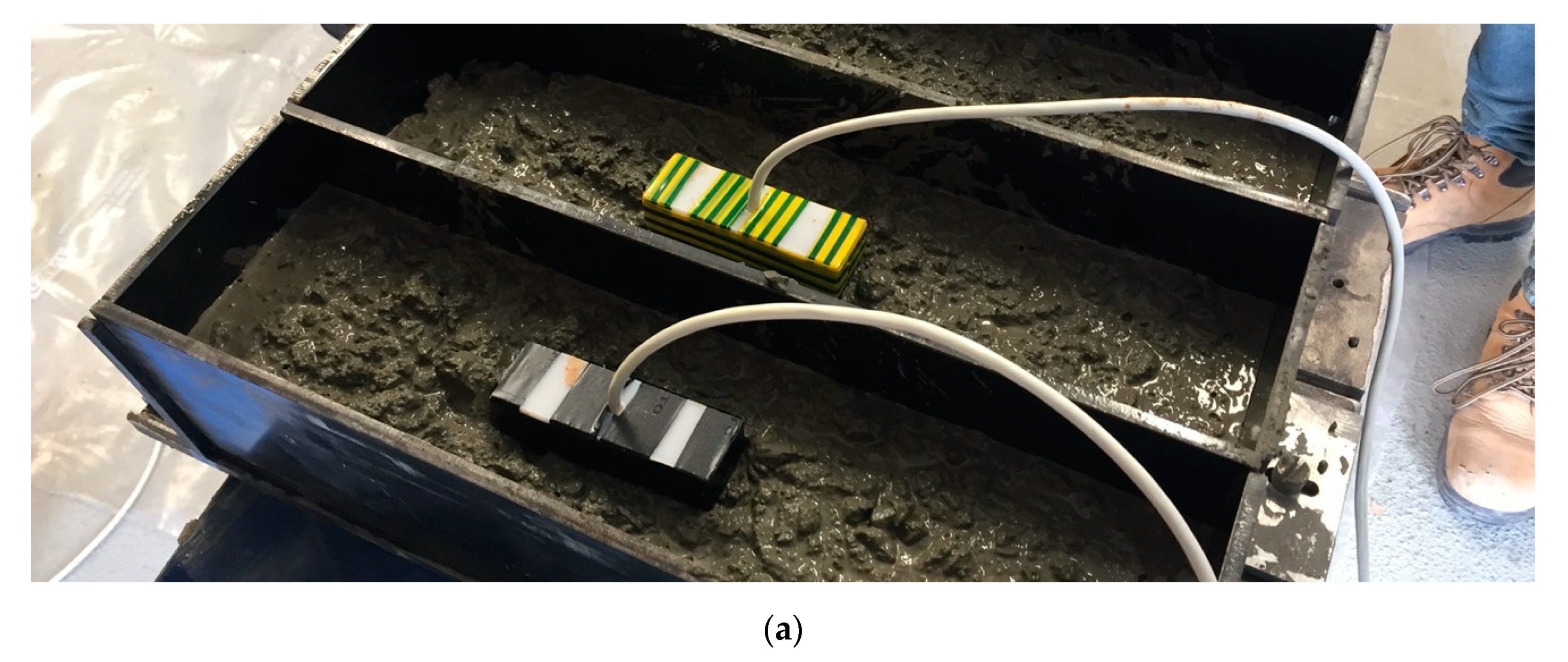
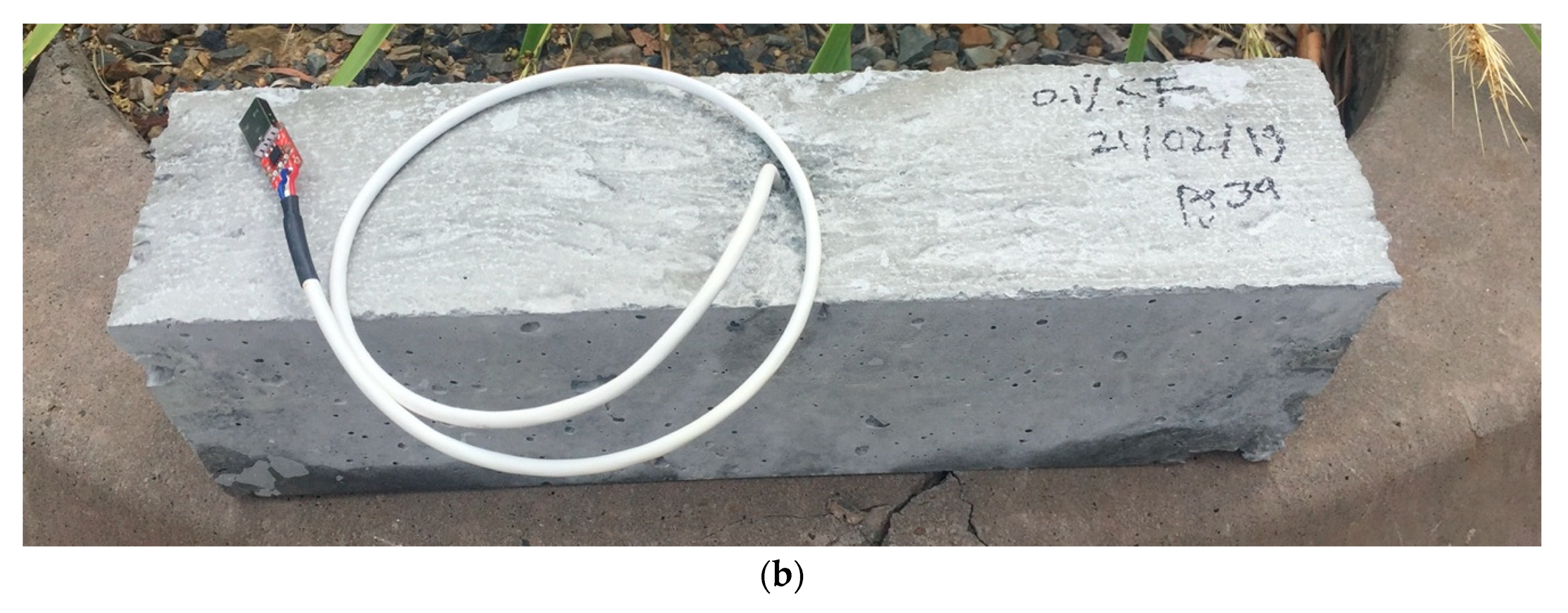
The device developed to detect concrete corrosion includes the following key components: sensing element, sensing device and interface (see
Figure 1). Each component performs a specific role in the measurement of the resistance of concrete and is described in the following sections.
1.3. Previous System
The proposed sensing device is an improved iteration of our previously developed sensing device [
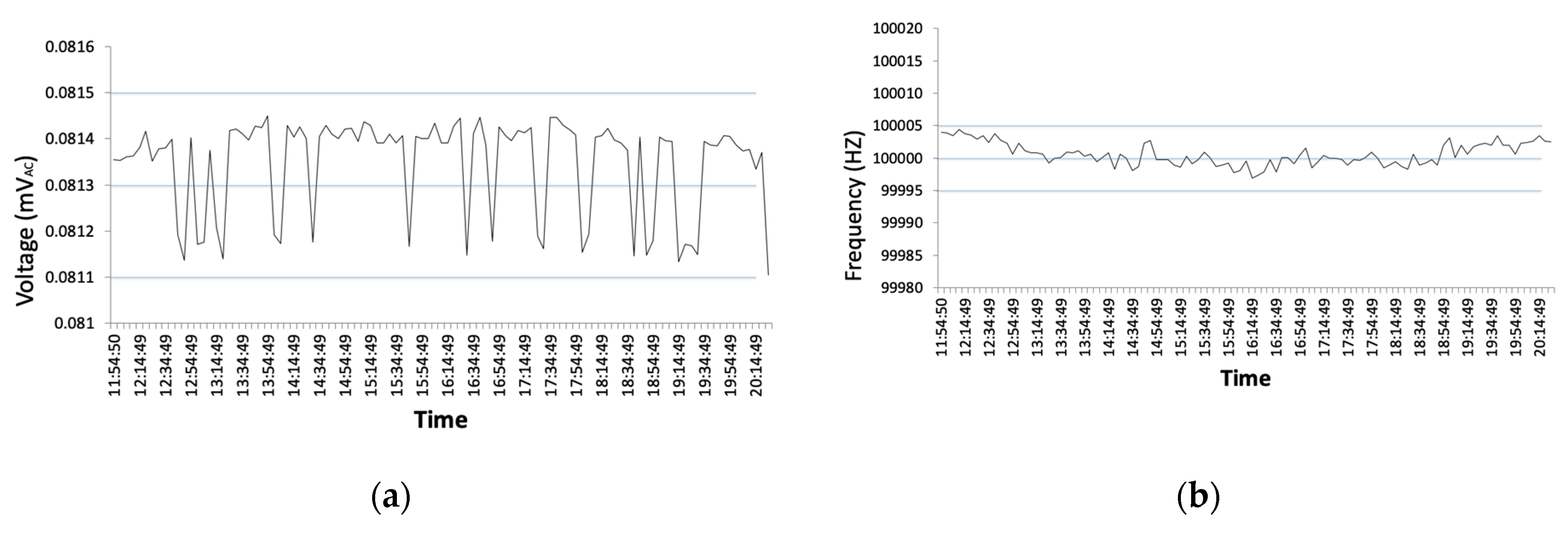
30] with a complete redesign of hardware and software. This includes a new waveform generation method, analog measurement method and external interfacing, with two revisions developed. Improving the sensing device was done to further lower power consumption and size of the device. The previous iteration consumed 25 mA peak current at 3.3-V supply voltage, due to the microcontroller generating the 100 kHz waveform. The internal clock speed of the microcontroller was continuously running at 32 MHz to generate this waveform. Components used on this iteration were large in size, with surface mount components selected for the new iteration to reduce overall size for embedding into concrete. The previous iteration provided clean results successfully emulating the Keysight E4980AL; however, it was observed to have slight voltage deviation after long periods of time. For this reason, developing a clean waveform generation and measurement circuit was needed for removing any DC offset the circuit might be inducing.
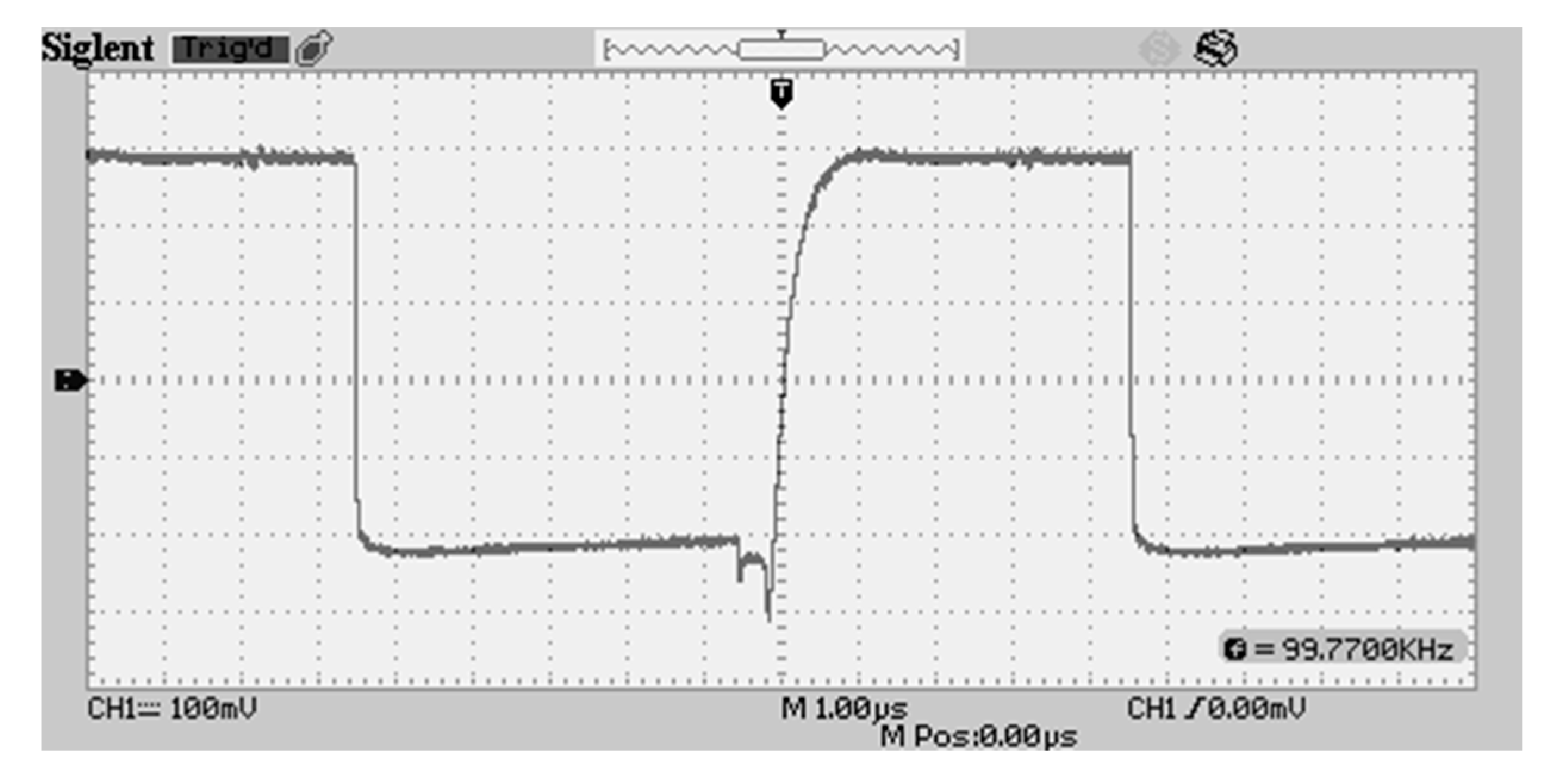
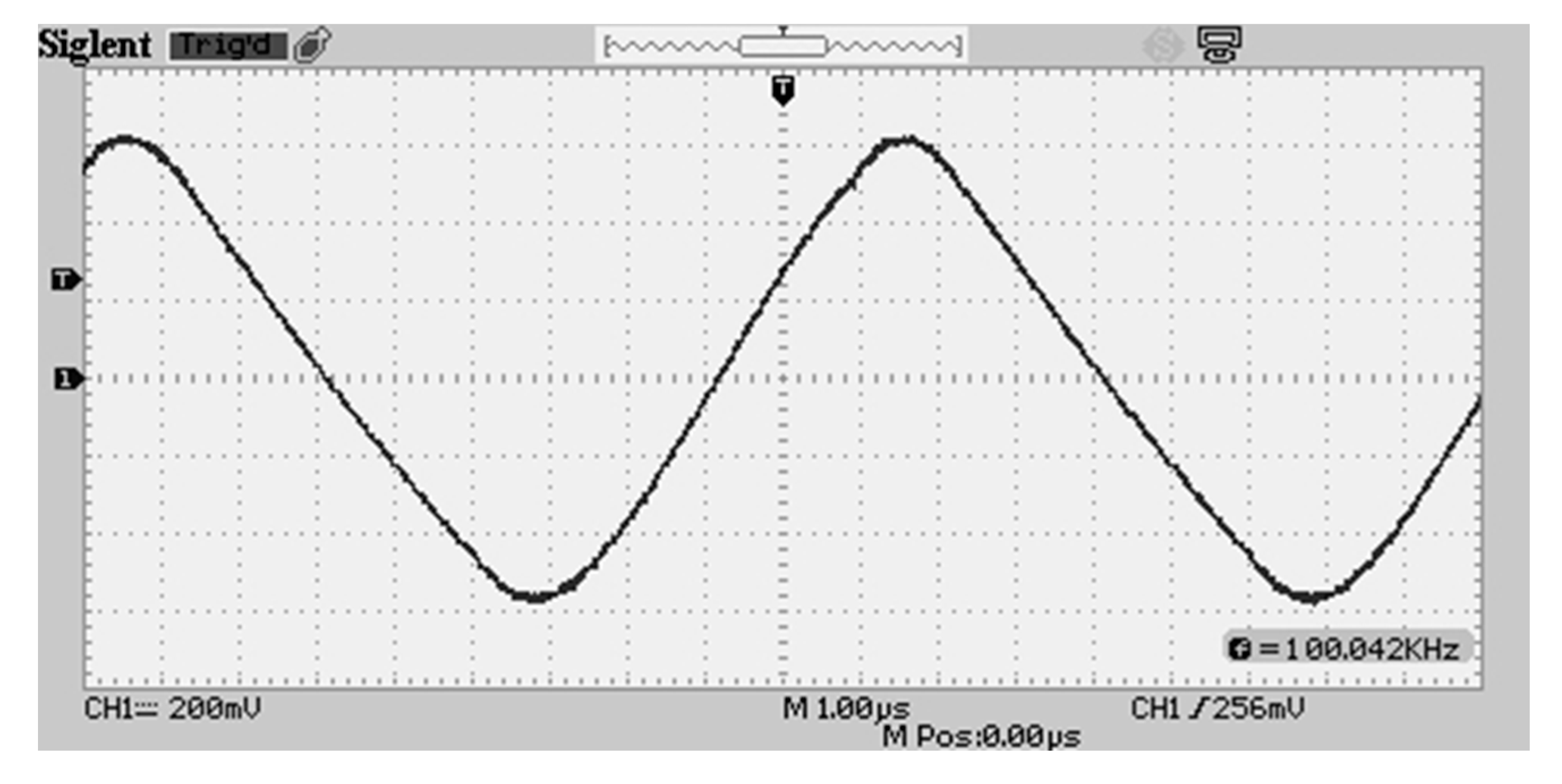
The use of a sinusoidal/triangular waveform was observed to provide little measurement difference between manufactured devices as compared to a square waveform. Thus, results between devices are more closely related. Different waveforms injected across the block were tested to show their validity, with square, ramp and sinusoidal providing results to measure resistance [
30].


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}