A New Dataset of People Flow in an Industrial Site with UWB and Motion Capture Systems




Abstract
:1. Introduction
2. Survey on Wireless Technologies and Existing Dataset in Nlos
2.1. Survey on Wireless Technologies
2.2. Survey on Existing Dataset
3. Experimental Set-Up
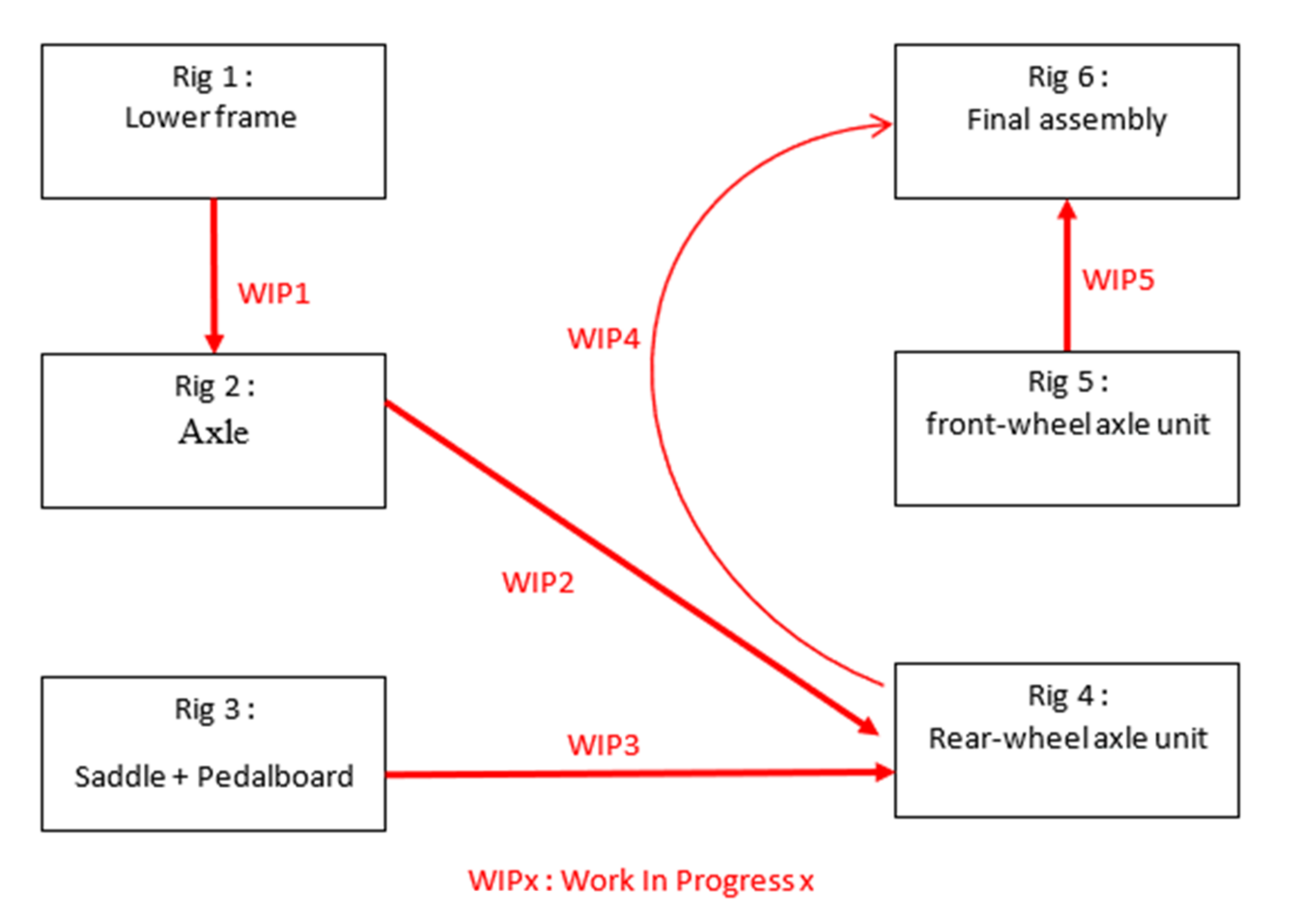
3.1. Follow-Up of People in a Manual Manufacturing Workshop
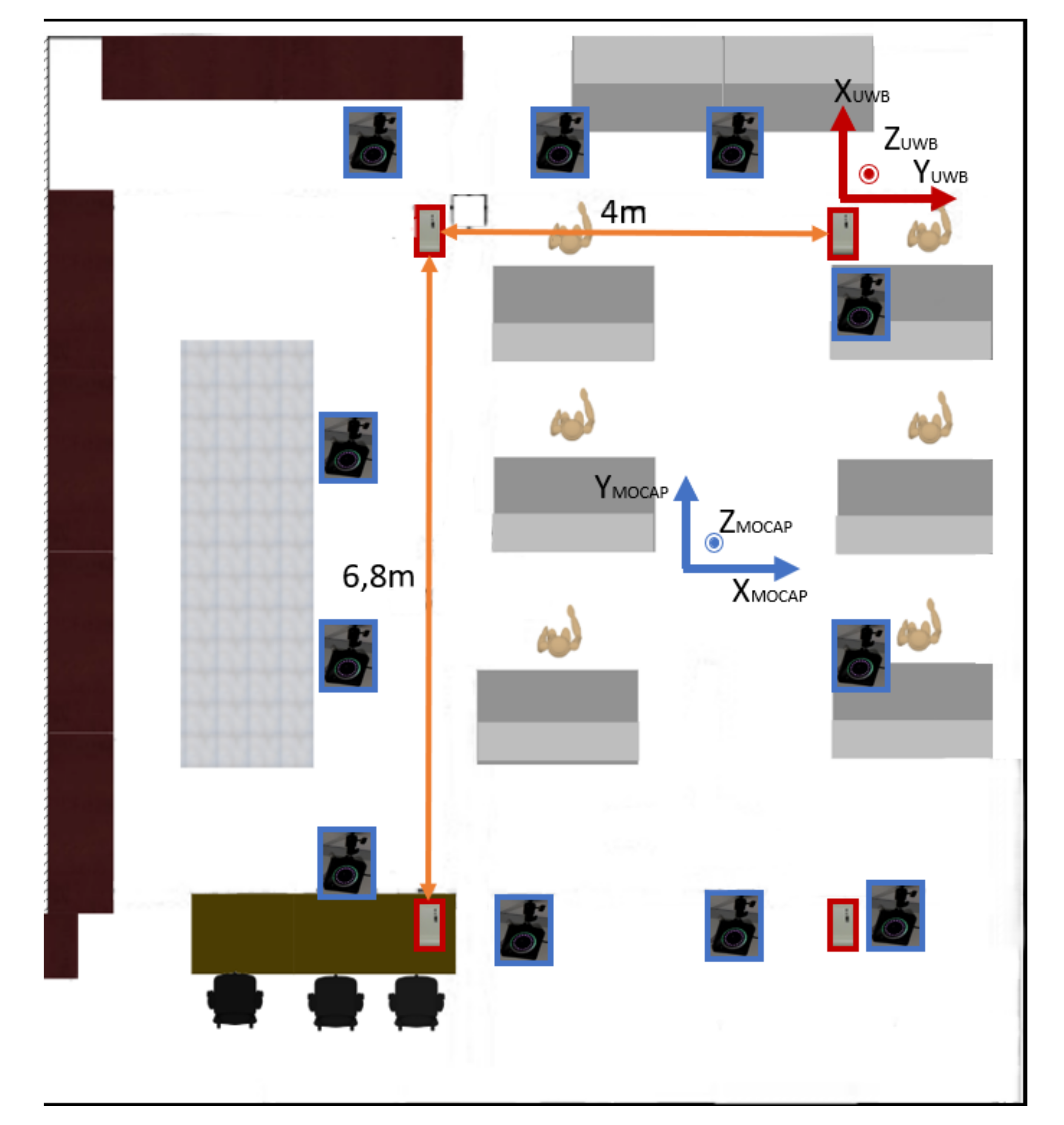
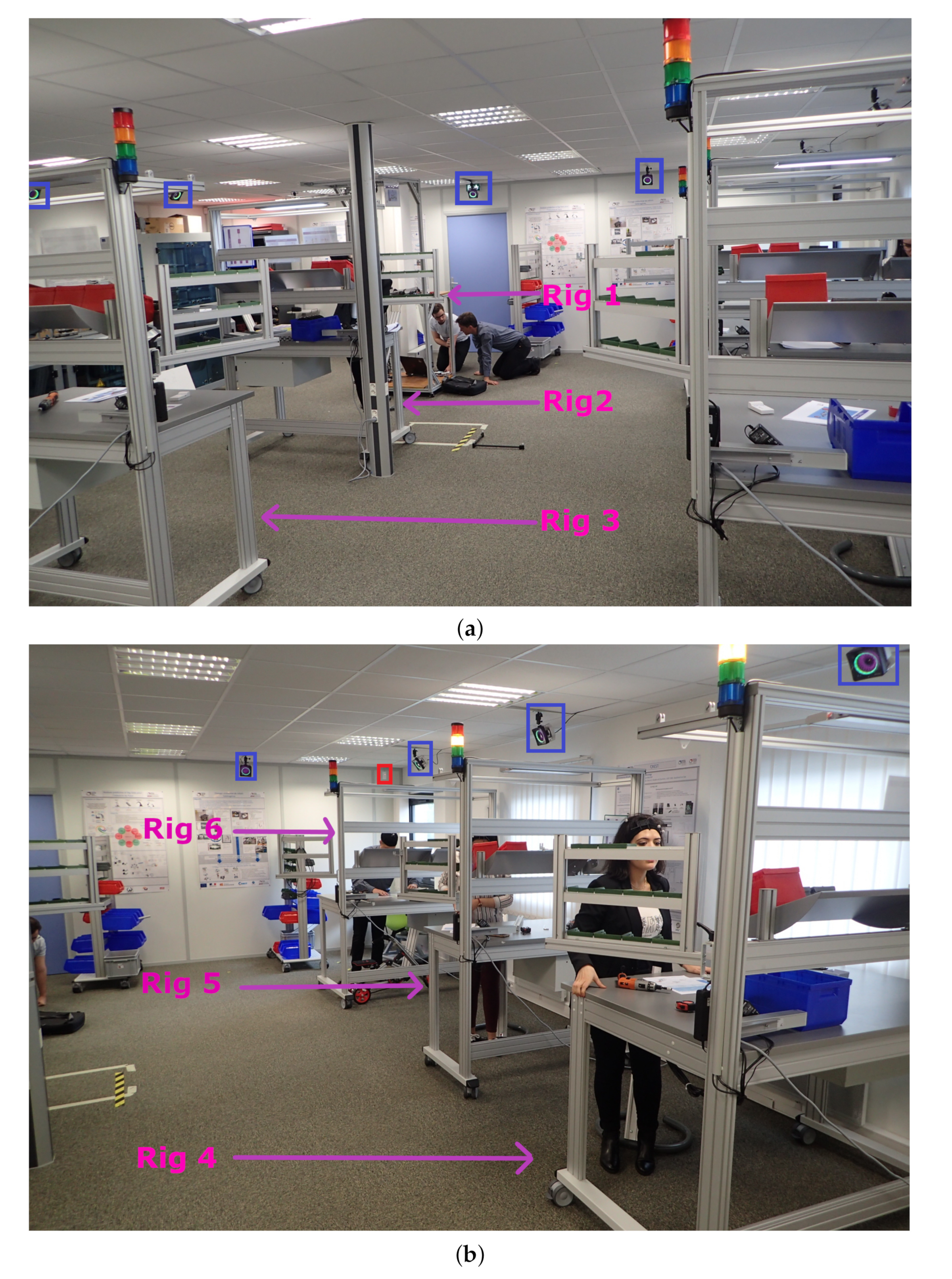
3.2. Industrial Setup
3.3. Motion Capture System
3.4. Ultra-Wide-Band System
3.5. Discussion on Raw Data
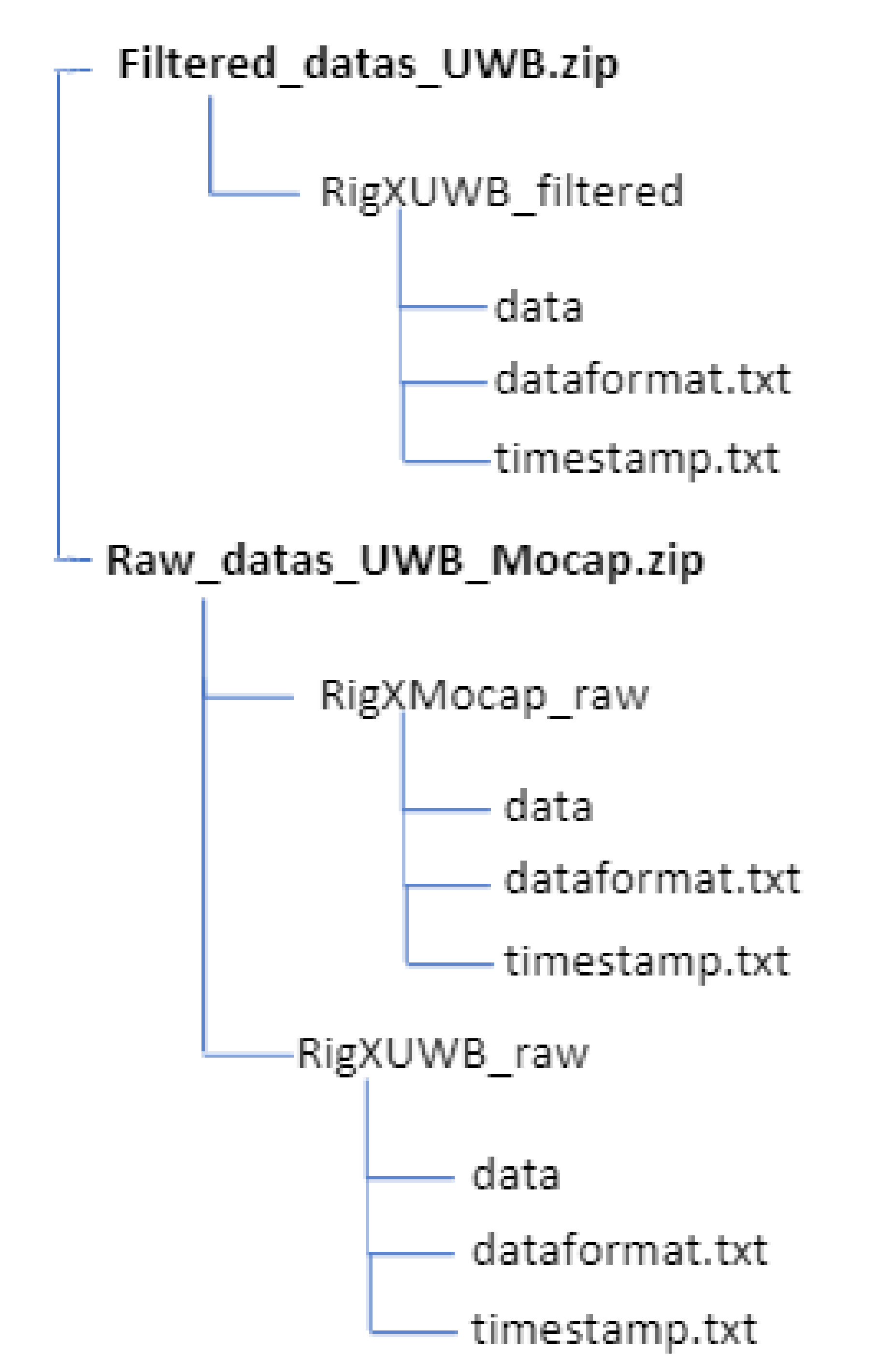
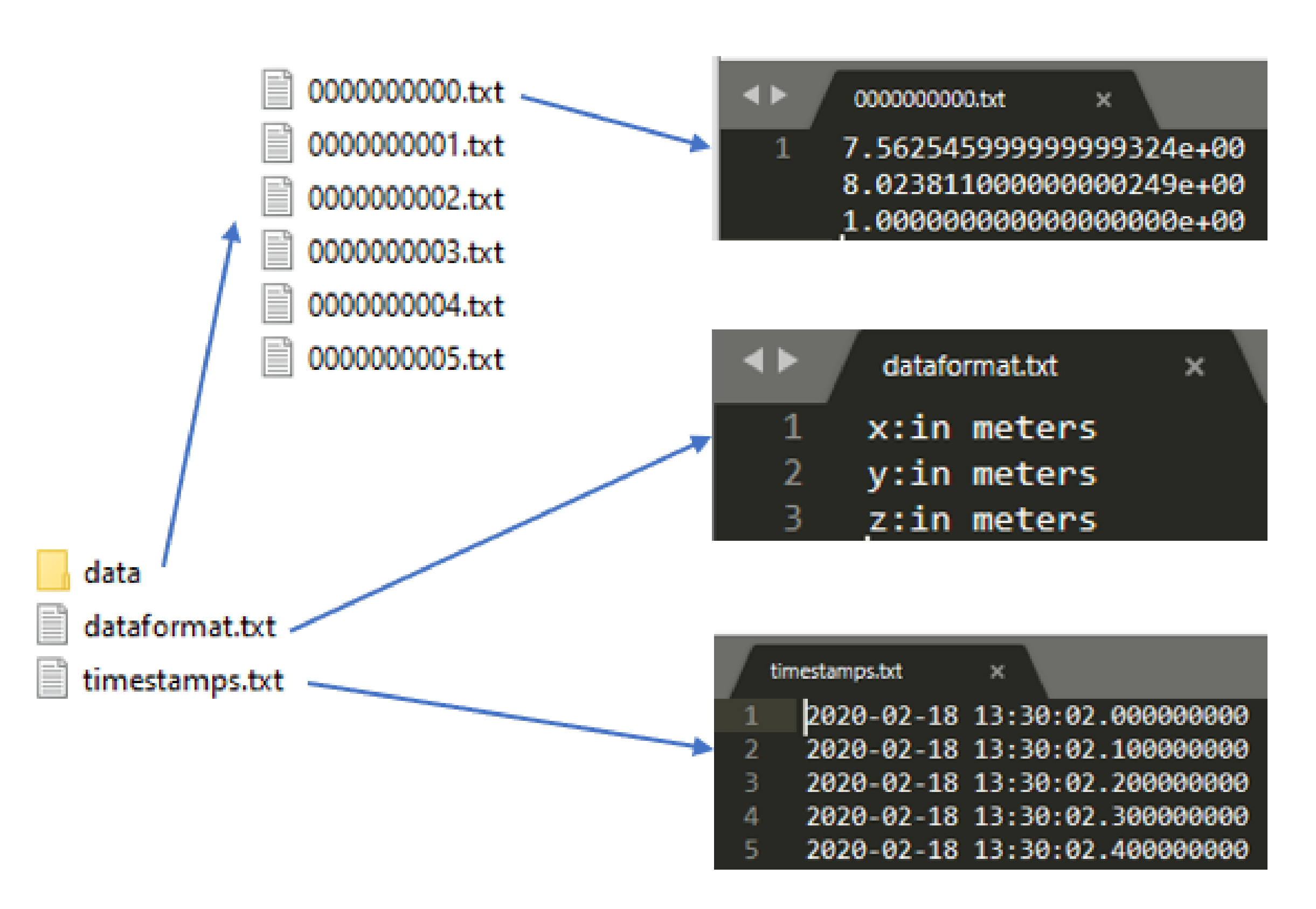
3.6. Dataset
4. Results and Improved Results
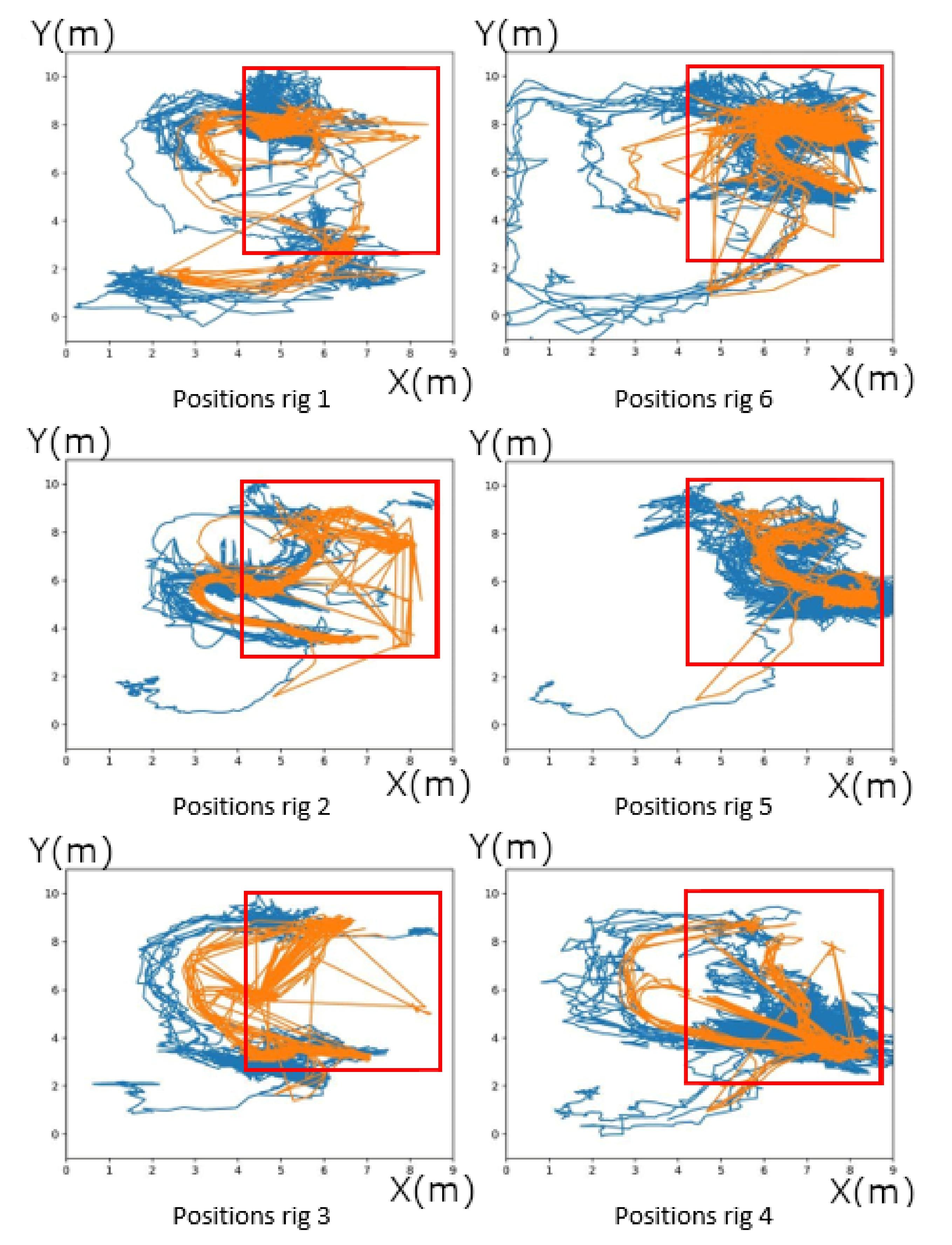
4.1. Positions
4.2. Accuracy
4.3. Discussion of Raw Values
4.4. Improved Results
5. Use and Interpretation
6. Conclusions and Further Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BLE | Bluetooth Low Energy |
| DOP | Dilution Of Precision |
| EKF | Extended Kalman Filter |
| ERP | Enterprise Resource Planning |
| GDOP | Geometry Dilution Of Precision |
| LOS | Line-Of-Sight |
| MoCap | Motion Capture |
| NLOS | Non-Line-Of-Sight |
| RFID | Radio Frequency Identification |
| RTLS | Real-time locating systems |
| RSSI | Received Signal Strength Indication |
| TDOA | Time Difference Of Arrival |
| TOA | Time Of Arrival |
| TWR | Two Way Ranging |
| UAV | Unmanned Aerial Vehicle |
| UWB | Ultra-Wide-Band |
References
- Rojko, A. Industry 4.0 concept: Background and overview. Int. J. Interact. Mob. Technol. (iJIM) 2017, 11, 77–90. [Google Scholar] [CrossRef] [Green Version]
- Haddara, M.; Elragal, A. The Readiness of ERP Systems for the Factory of the Future. Procedia Comput. Sci. 2015, 64, 721–728. [Google Scholar] [CrossRef] [Green Version]
- Lasi, H.; Fettke, P.; Kemper, H.G.; Feld, T.; Hoffmann, M. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239–242. [Google Scholar] [CrossRef]
- Gorecky, D.; Schmitt, M.; Loskyll, M.; Zühlke, D. Human-machine-interaction in the industry 4.0 era. In Proceedings of the 12th IEEE International Conference on Industrial Informatics (INDIN), Porto Alegre, Brazil, 27–30 July 2014; pp. 289–294. [Google Scholar]
- Candell, R.; Kashef, M.; Liu, Y.; Lee, K.B.; Foufou, S. Industrial wireless systems guidelines: Practical considerations and deployment life cycle. IEEE Ind. Electron. Mag. 2018, 12, 6–17. [Google Scholar] [CrossRef]
- Candell, R.; Kashef, M. Industrial wireless: Problem space, success considerations, technologies, and future direction. In Proceedings of the Resilience Week (RWS), Wilmington, DE, USA, 18–22 September 2017; pp. 133–139. [Google Scholar]
- Khudhair, A.A.; Jabbar, S.Q.; Sulttan, M.Q.; Wang, D. Wireless indoor localization systems and techniques: Survey and comparative study. Indones. J. Electr. Eng. Comput. Sci. 2016, 3, 392–409. [Google Scholar] [CrossRef] [Green Version]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. Spotfi: Decimeter level localization using wifi. In Proceedings of the ACM Conference on Special Interest Group on Data Communication, London, UK, 17–21 August 2015; pp. 269–282. [Google Scholar]
- Chen, C.; Chen, Y.; Han, Y.; Lai, H.; Liu, K.J.R. Achieving Centimeter-Accuracy Indoor Localization on WiFi Platforms: A Frequency Hopping Approach. IEEE Internet Things J. 2017, 4, 111–121. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; Su, Y.W.; Shen, C.C. A comparative study of wireless protocols: Bluetooth, UWB, ZigBee, and Wi-Fi. In Proceedings of the IECON 2007-33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 46–51. [Google Scholar]
- Gharat, V.; Colin, E.; Baudoin, G.; Richard, D. Indoor performance analysis of LF-RFID based positioning system: Comparison with UHF-RFID and UWB. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Kiers, M.; Bischof, W.; Krajnc, E.; Dornhofer, M. Evaluation and improvements of an rfid based indoor navigation system for visually impaired and blind people. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimarães, Portugal, 21–23 September 2011; Volume 16. [Google Scholar]
- Cui, Y.; Zhang, Y.; Huang, Y.; Wang, Z.; Fu, H. Novel WiFi/MEMS Integrated Indoor Navigation System Based on Two-Stage EKF. Micromachines 2019, 10, 198. [Google Scholar] [CrossRef] [Green Version]
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The cricket location-support system. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 32–43. [Google Scholar]
- Sato, T.; Nakamura, S.; Terabayashi, K.; Sugimoto, M.; Hashizume, H. Design and implementation of a robust and real-time ultrasonic motion-capture system. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portuga, 21–23 September 2011; pp. 1–6. [Google Scholar]
- Wang, Y.T.; Li, J.; Zheng, R.; Zhao, D. ARABIS: An Asynchronous Acoustic Indoor Positioning System for Mobile Devices. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Khoshelham, K.; Elberink, S.O. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [Green Version]
- Arai, T.; Yoshizawa, T.; Aoki, T.; Zempo, K.; Okada, Y. Evaluation of Indoor Positioning System based on Attachable Infrared Beacons in Metal Shelf Environment. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019; pp. 1–4. [Google Scholar]
- Islam, B.; Islam, M.T.; Nirjon, S. Feasibility of LoRa for Indoor Localization. 2017, pp. 1–11. Available online: https://pdfs.semanticscholar.org/ab00/c1eacbdd76732b7438ec8e5653f7c875def4.pdf (accessed on 31 May 2019).
- Mautz, R. Indoor Positioning Technologies. Habilitation Thesis, ETH Zurich, Zürich, Switzerland, 2012. [Google Scholar]
- Gu, F.; Niu, J.; Duan, L. WAIPO: A fusion-based collaborative indoor localization system on smartphones. IEEE/ACM Trans. Netw. 2017, 25, 2267–2280. [Google Scholar] [CrossRef]
- Ashraf, I.; Kang, M.; Hur, S.; Park, Y. MINLOC: Magnetic Field Patterns-Based Indoor Localization Using Convolutional Neural Networks. IEEE Access 2020, 8, 66213–66227. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Shafiq, M.; Kumari, S.; Park, Y. GUIDE: Smartphone sensors-based pedestrian indoor localization with heterogeneous devices. Int. J. Commun. Syst. 2019, 32, e4062. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, S.; Park, Y. DeepLocate: Smartphone Based Indoor Localization with a Deep Neural Network Ensemble Classifier. Sensors 2020, 20, 133. [Google Scholar] [CrossRef] [Green Version]
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor localization using pervasive magnetic field and opportunistic WiFi sensing. IEEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Subbu, K.P.; Gozick, B.; Dantu, R. LocateMe: Magnetic-fields-based indoor localization using smartphones. ACM Trans. Intell. Syst. Technol. (TIST) 2013, 4, 1–27. [Google Scholar] [CrossRef]
- Delamare, M.; Boutteau, R.; Savatier, X.; Iriart, N. Static and Dynamic Evaluation of an UWB Localization System for Industrial Applications. Sci 2020, 2, 7. [Google Scholar] [CrossRef] [Green Version]
- Dragomirescu, D.; Kraemer, M.; Jatlaoui, M.; Pons, P.; Aubert, H.; Thain, A.; Plana, R. 60 GHz Wireless Nano-Sensors Network for Structure Health Monitoring as Enabler for Safer, Greener Aircrafts. In Advanced Topics in Optoelectronics, Microelectronics, and Nanotechnologies V; SPIE: Bellingham, WA, USA, 2010; p. 782105. [Google Scholar]
- Seco, F.; Jiménez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 9–14. [Google Scholar]
- Farid, Z.; Nordin, R.; Ismail, M. Recent advances in wireless indoor localization techniques and system. J. Comput. Netw. Commun. 2013, 2013, 185138. [Google Scholar] [CrossRef]
- Jimenez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A comparison of pedestrian dead-reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Kuang, J.; Niu, X.; Chen, X. Robust pedestrian dead reckoning based on MEMS-IMU for smartphones. Sensors 2018, 18, 1391. [Google Scholar] [CrossRef] [Green Version]
- Vo, Q.D.; De, P. A survey of fingerprint-based outdoor localization. IEEE Commun. Surv. Tutor. 2015, 18, 491–506. [Google Scholar] [CrossRef]
- Le, Q.; Kaplan, L.M. Target localization using proximity binary sensors. In Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010; pp. 1–8. [Google Scholar]
- Hu, J. Wireless Industrial Indoor Localization and Its Application. Master’s Thesis, UiT Norges Arktiske Universitet, Tromsø, Norway, 2017. [Google Scholar]
- Bregar, K.; Hrovat, A.; Mohorcic, M. NLOS Channel Detection with Multilayer Perceptron in Low-Rate Personal Area Networks for Indoor Localization Accuracy Improvement. In Proceedings of the 8th Jožef Stefan International Postgraduate School Students’ Conference, Ljubljana, Slovenia, 31 May–1 June 2016; Volume 31. [Google Scholar]
- Lian Sang, C.; Steinhagen, B.; Homburg, J.D.; Adams, M.; Hesse, M.; Rückert, U. Identification of NLOS and Multi-Path Conditions in UWB Localization Using Machine Learning Methods. Appl. Sci. 2020, 10, 3980. [Google Scholar] [CrossRef]
- Minne, K.; Macoir, N.; Rossey, J.; Van den Brande, Q.; Lemey, S.; Hoebeke, J.; De Poorter, E. Experimental evaluation of UWB indoor positioning for indoor track cycling. Sensors 2019, 19, 2041. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raza, U.; Khan, A.; Kou, R.; Farnham, T.; Premalal, T.; Stanoev, A.; Thompson, W. Dataset: Indoor Localization with Narrow-band, Ultra-Wideband, and Motion Capture Systems. In Proceedings of the 2nd Workshop on Data Acquisition to Analysis, New York, NY, USA, 10 November 2019; pp. 34–36. [Google Scholar]
- Queralta, J.P.; Almansa, C.M.; Schiano, F.; Floreano, D.; Westerlund, T. UWB-based system for UAV Localization in GNSS-Denied Environments: Characterization and Dataset. arXiv 2020, arXiv:2003.04380. [Google Scholar]
- Barral, V.; Suárez-Casal, P.; Escudero, C.J.; García-Naya, J.A. Multi-sensor accurate forklift location and tracking simulation in industrial indoor environments. Electronics 2019, 8, 1152. [Google Scholar] [CrossRef] [Green Version]
- Barral, V.; Escudero, C.J.; García-Naya, J.A.; Maneiro-Catoira, R. NLOS identification and mitigation using low-cost UWB devices. Sensors 2019, 19, 3464. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Bi, Y.; Li, K.; Wang, K.; Lin, F.; Chen, B.M. Accurate 3D localization for MAV swarms by UWB and IMU fusion. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; pp. 100–105. [Google Scholar]
- Großwindhager, B.; Rath, M.; Kulmer, J.; Bakr, M.S.; Boano, C.A.; Witrisal, K.; Römer, K. Dataset: Single-anchor indoor localization with decawave DW1000 and directional antennas. In Proceedings of the First Workshop on Data Acquisition To Analysis, Shenzhen, China, 4–7 November 2018; pp. 21–22. [Google Scholar]
- IEEE Standard for Local and Metropolitan Area Networks—Part 15.4: Low-Rate Wireless Personal Area Networks (lr-wpans). Available online: https://standards.ieee.org/project/802_15_4r.html (accessed on 12 August 2020).
- Merriaux, P.; Dupuis, Y.; Boutteau, R.; Vasseur, P.; Savatier, X. A Study of Vicon System Positioning Performance. Sensors 2017, 17, 1591. [Google Scholar] [CrossRef]
- Furtado, J.S.; Liu, H.H.; Lai, G.; Lacheray, H.; Desouza-Coelho, J. Comparative Analysis of OptiTrack Motion Capture Systems. In Advances in Motion Sensing and Control for Robotic Applications; Springer: Cham, Switzerland, 2019; pp. 15–31. [Google Scholar]
- Pietrzyk, M.M.; von der Grün, T. Ultra-wideband technology-based ranging platform with real-time signal processing. In Proceedings of the 2010 4th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, QLD, Australia, 13–15 December 2010; pp. 1–5. [Google Scholar]
- Zito, D.; Morche, D. UWB Radios—The maturity age? In Proceedings of the 2016 14th IEEE International New Circuits and Systems Conference (NEWCAS), Vancouver, BC, Canada, 26–29 June 2016; pp. 1–4. [Google Scholar]
- Silva, B.; Pang, Z.; Åkerberg, J.; Neander, J.; Hancke, G. Experimental study of UWB-based high precision localization for industrial applications. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 280–285. [Google Scholar]
- Delamare, M.; Boutteau, R.; Savatier, X.; Iriart, N. Evaluation of a UWB localization system in static and dynamic. In Proceedings of the Tenth International Conference on Indoor Positioning and Indoor Navigation-Work-in-Progress Papers (IPIN-WiP 2019), Pisa, Italy, 30 September–3 October 2019; pp. 80–86. [Google Scholar]
- Bard, J.D.; Ham, F.M. Time difference of arrival dilution of precision and applications. IEEE Trans. Signal Proc. 1999, 47, 521–523. [Google Scholar] [CrossRef]
- Frattasi, S.; Della Rosa, F. Mobile Positioning and Tracking: From Conventional to Cooperative Techniques; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Ye, R.; Liu, H. UWB TDOA localization system: Receiver configuration analysis. In Proceedings of the 2010 International Symposium on Signals, Systems and Electronics, Nanjing, China, 16–19 September 2010; Volume 1, pp. 1–4. [Google Scholar]
- Savitzky, A.; Golay, M.J. Smoothing and differentiation of data by simplified least squares procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Steinier, J.; Termonia, Y.; Deltour, J. Smoothing and differentiation of data by simplified least square procedure. Anal. Chem. 1972, 44, 1906–1909. [Google Scholar] [CrossRef]
- Tian, Q.; Kevin, I.; Wang, K.; Salcic, Z. A low-cost INS and UWB fusion pedestrian tracking system. IEEE Sens. J. 2019, 19, 3733–3740. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Khoshelham, K. Comparative analysis of robust extended Kalman filter and incremental smoothing for UWB/PDR fusion positioning in NLOS environments. Acta Geodaetica et Geophysica 2019, 54, 157–179. [Google Scholar] [CrossRef]
- Ferreira, A.G.; Fernandes, D.; Catarino, A.P.; Rocha, A.M.; Monteiro, J.L. A Loose-Coupled Fusion of Inertial and UWB Assisted by a Decision-Making Algorithm for Localization of Emergency Responders. Electronics 2019, 8, 1463. [Google Scholar] [CrossRef] [Green Version]
- Kaya, F.A.; Saritas, M. A computer simulation of dilution of precision in the global positioning system using Matlab. In Proceedings of the 4th International Conference on Electrical and Electronic Engineering, Bursa, Turkey, 7–11 December 2005; Volume 711. [Google Scholar]
- Bharadwaj, R.; Swaisaenyakorn, S.; Batchelor, J.C.; Koul, S.K.; Alomainy, A. Base-station random placement effect on the accuracy of ultrawideband body-centric localization applications. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 1319–1323. [Google Scholar] [CrossRef]
- Fort, A.; Desset, C.; Ryckaert, J.; De Doncker, P.; Van Biesen, L.; Wambacq, P. Characterization of the ultra wideband body area propagation channel. In Proceedings of the 2005 IEEE International Conference on Ultra-Wideband, Zurich, Switzerland, 5–8 September 2005. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Measurement Type | Advantage in Industrial Site | Disadvantage in Industrial Site | Technology Related to This Method |
|---|---|---|---|---|
| Proximity | Cell-ID | Accuracy can be improved by adding more antenna. Use for item or access point identifications with high accuracy. | Adding more antenna wil increase the cost. Accuracy depend on the size of the cell. Cannot do trajectory tracking | Wi-Fi, Bluetooth, RFID, Zigbee, Infrared, Visible Light |
| Direction | Angle of Arrival | Can provide high localization accuracy, does not require any fingerprinting. | Might require directional antennas and complex hardware, requires comparatively complex algorithms and performance deteriorates with increase in distance between the transmitter and receiver. In the NLOS situation for industrial sites, an additional algorithm will have to be used. | Wi-Fi, UWB, Ultrason. |
| Time | Time Difference of Arrival | Does not require any fingerprinting, does not require clock synchronization among the device and RN | Requires clock synchronization among the RNs, might require time stamps, requires larger bandwidth | Wi-Fi, UWB, Bluetooth, Infrared, Ultrason. |
| Time Of Arrival | Provides high localization accuracy, does not require any fingerprinting | Requires time synchronization between the transmitters and receivers, might require time stamps and multiple antennas at the transmitter and receiver. Line of Sight is mandatory for accurate performance. | Infrared, Wi-Fi, Ultrason. | |
| Finger- printing | RSSI | Easy to implement, cost efficient, can be used with a number of technologies | Prone to multipath fading and environmental noise, lower localization accuracy, can require fingerprinting |
Wi-Fi, RFID, Bluetooth, Zigbee. Wi-Fi, Bluetooth, RFID, Visible Light, Magnetic Field |
| Dead Reckoning | Acceleration, Velocity | Can do trajectory tracking with high precision. Not infrastructure -dependent | Inaccuracy of the process is cumulative, so the deviation in the position fix grows with time. | Inertial navigation system |
| Overall Experiment in Red Square Zone | X-Axis | Y-Axis | 2D | |
|---|---|---|---|---|
| Raw UWB data | Mean error | 0.21 m | 0.12 m | 0.16 m |
| Range | 2.84 m | 3.45 m | 3.14 m | |
| Standard deviation | 0.46 m | 0.38 m | 0.42 m | |
| Filtered UWB data | Mean error | 0.19 m | 0.11 m | 0.15 m |
| Range | 2.74 m | 3.44 m | 3.09 m | |
| Standard deviation | 0.41 m | 0.38 m | 0.39 m |
| Dataset | Distance Est | Modalities | Number of Tag | Anchor Settings | Industrial Scenarii | UWB Node |
|---|---|---|---|---|---|---|
| Cung et al. [39] | AltDS-TWR | UWB | 1 | 4 | No | DWM1000 |
| Minne et al. [40] | ToF | UWB | 6 | 8 | No | DWM1000 |
| Raza et al. [41] | ToF(TDOA) | UWB+BLE &UWB+MoCap | 1 | 4 | No | DWM1001 |
| Queralta et al. [42] | ToF | UWB+MoCap | 1–4 | multiple | No | DWM1001 |
| Barral et al. [43] | RSS | UWB+IMU +camera | 1 | No | Pozyx | |
| Li et al. [45] | ToF | IMU+UWB +Mocap(VICON) | 1 | 6 | No | TimeDomain |
| Bernhard et al. [46] | ToF | UWB | 1 | 1 | No | DW1000 |
| Ours | ToF | UWB+MoCap | 6 | 4 | Yes | MDEK1001 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Delamare, M.; Duval, F.; Boutteau, R. A New Dataset of People Flow in an Industrial Site with UWB and Motion Capture Systems. Sensors 2020, 20, 4511. https://doi.org/10.3390/s20164511
Delamare M, Duval F, Boutteau R. A New Dataset of People Flow in an Industrial Site with UWB and Motion Capture Systems. Sensors. 2020; 20(16):4511. https://doi.org/10.3390/s20164511
Chicago/Turabian StyleDelamare, Mickael, Fabrice Duval, and Remi Boutteau. 2020. "A New Dataset of People Flow in an Industrial Site with UWB and Motion Capture Systems" Sensors 20, no. 16: 4511. https://doi.org/10.3390/s20164511
APA StyleDelamare, M., Duval, F., & Boutteau, R. (2020). A New Dataset of People Flow in an Industrial Site with UWB and Motion Capture Systems. Sensors, 20(16), 4511. https://doi.org/10.3390/s20164511