Strapdown Inertial Navigation Systems for Positioning Mobile Robots—MEMS Gyroscopes Random Errors Analysis Using Allan Variance Method

 ,
,  ,
,  ,
,  ,
,
Abstract
:1. Introduction
- Analyze the components of the gyroscope random error due to the influence of various destabilizing factors.
- Study the MEMS gyroscopes in order to determine a value of their random error components for each axis of Allan deviation curves.
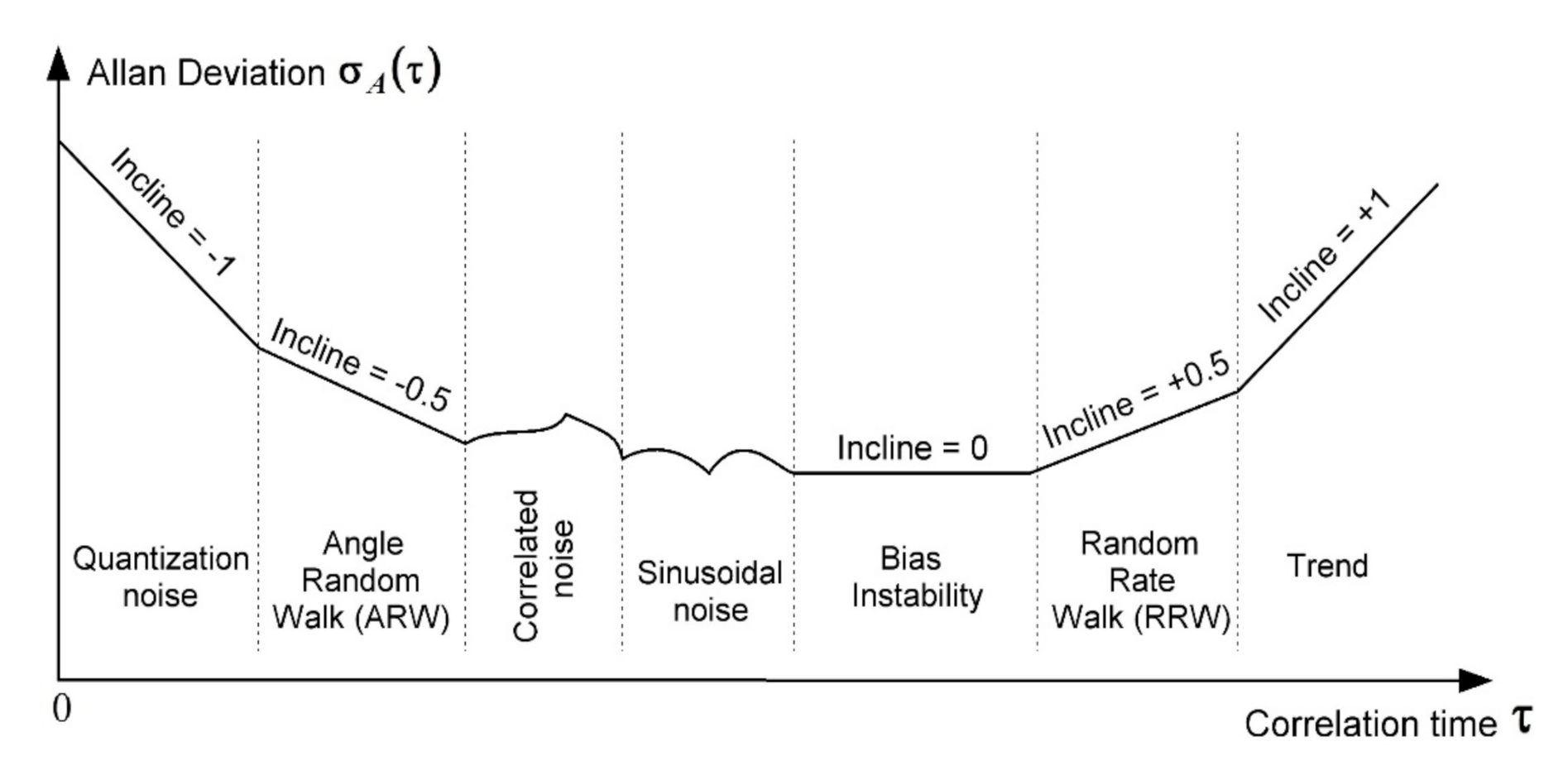
2. Methods of Analyzing Random Errors in Gyroscopes
- the sensitivity to acceleration , where is the coefficient of gyroscope sensitivity to acceleration against the respective axis ((rad∙s)/m) or ((rad/s)/g); is the acceleration;
- the sensitivity to temperature changes , where is the coefficient of gyroscope sensitivity to temperature changes, (rad/(s∙°C); is the temperature deviation from its norm;
- the sensitivity to vibration , where is the gyroscope sensitivity coefficient to a vibration frequency ((rad/s)/Hz) or (rad); is the vibration frequency;
- sensitivity variations that are not a function of the measured orientation angles, for example, those depending on climatic factors (temperature T, relative humidity W, and ambient air pressure P), which differ from their nominal values when measuring motion of objects T0 = 20 °C, W0 = 65%, and P0 = 99.992 kPa (750 mm. mer. col.) (climate drift is ), depending only on temperature (temperature drift is ), or as a result of other factors during the time interval (time drift is ):
3. Analysis of the Gyroscope Random Error Components
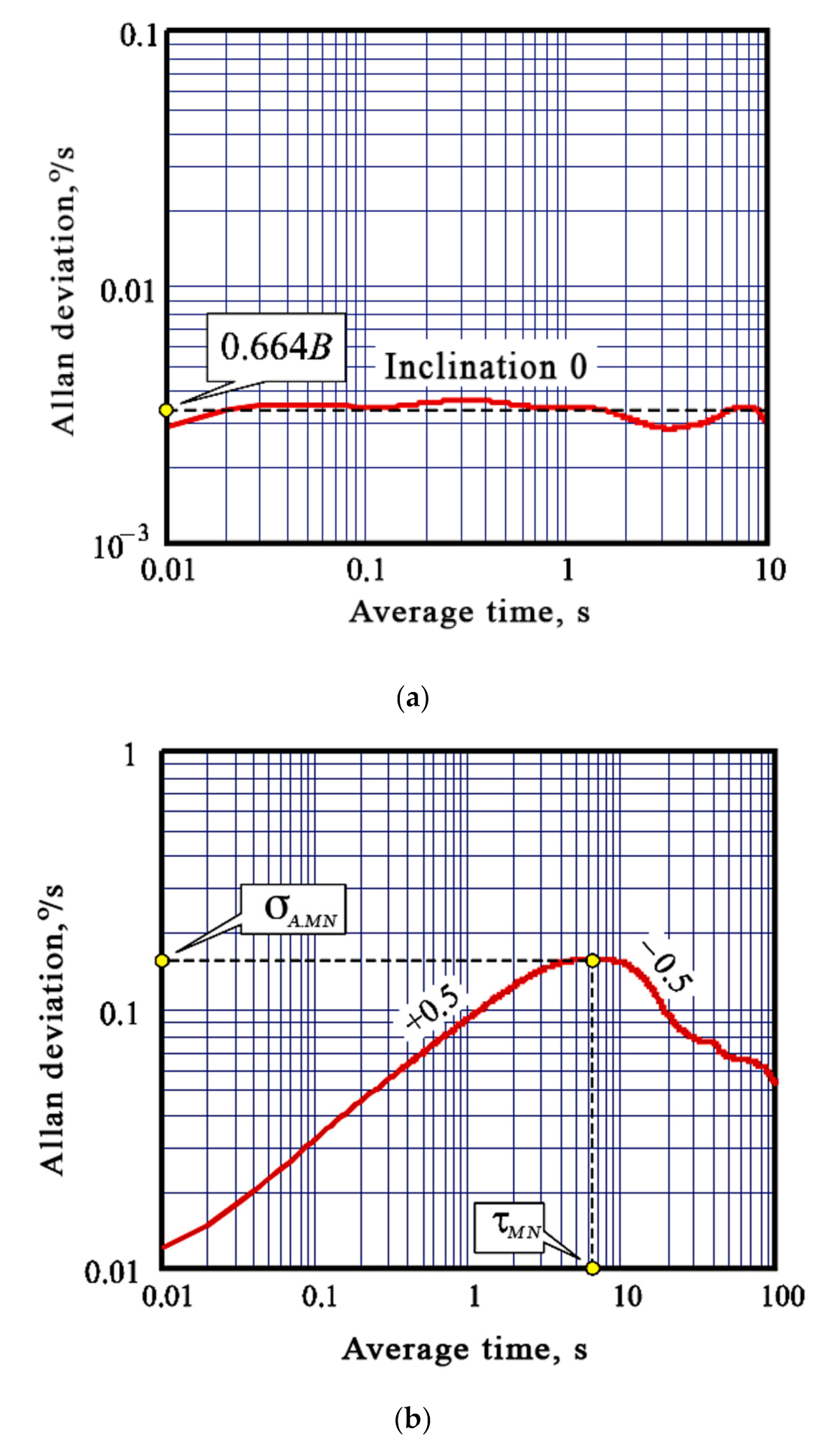
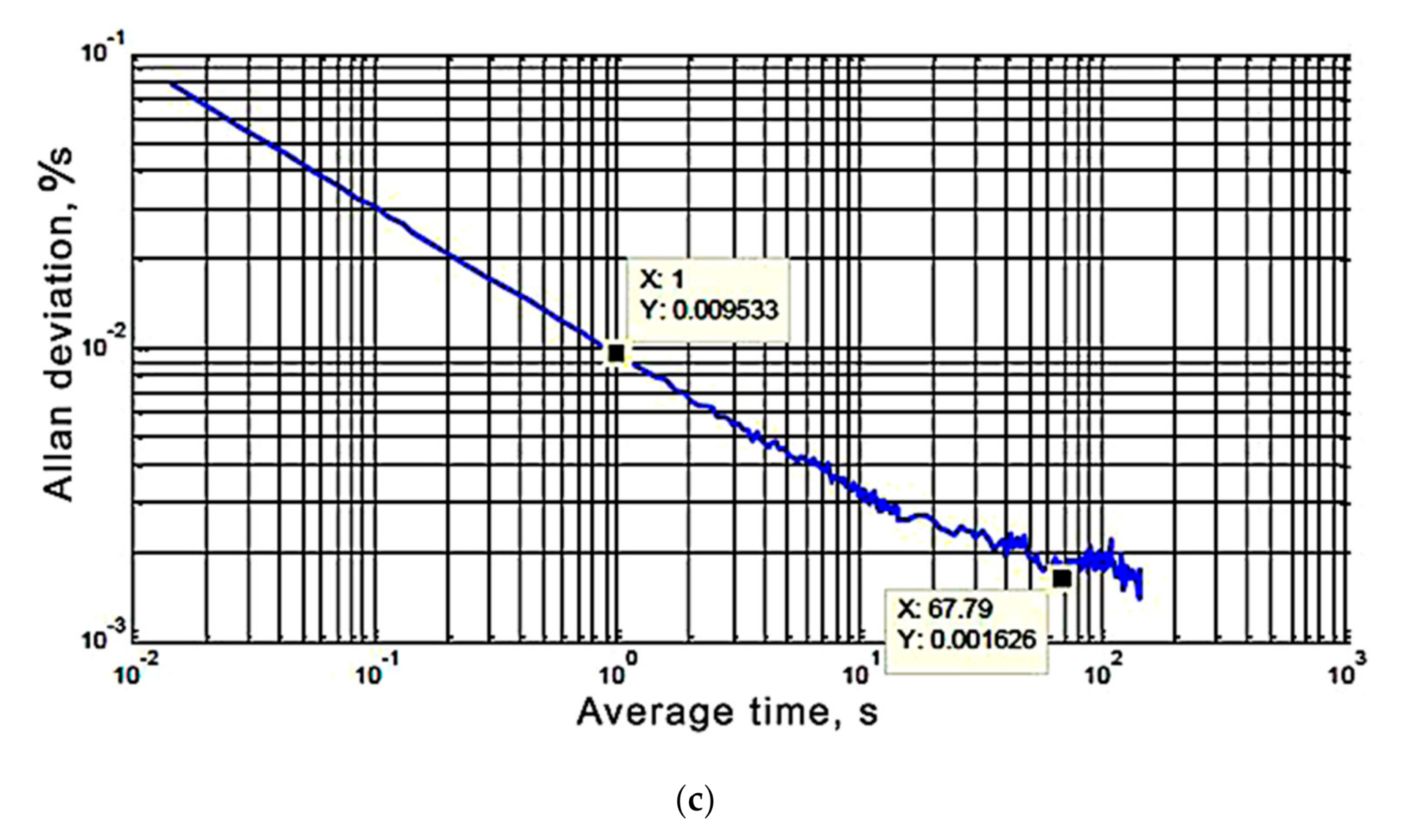
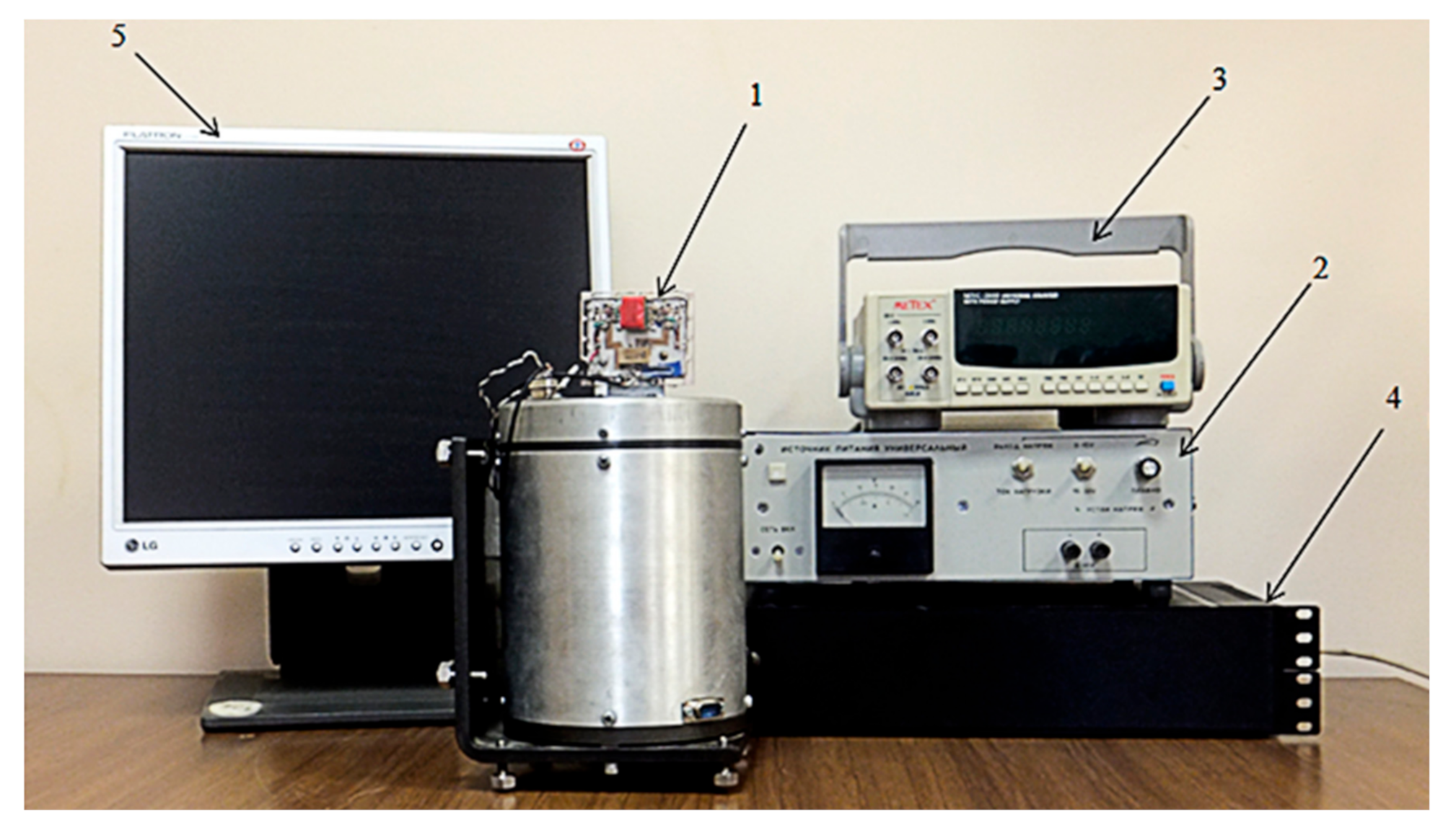
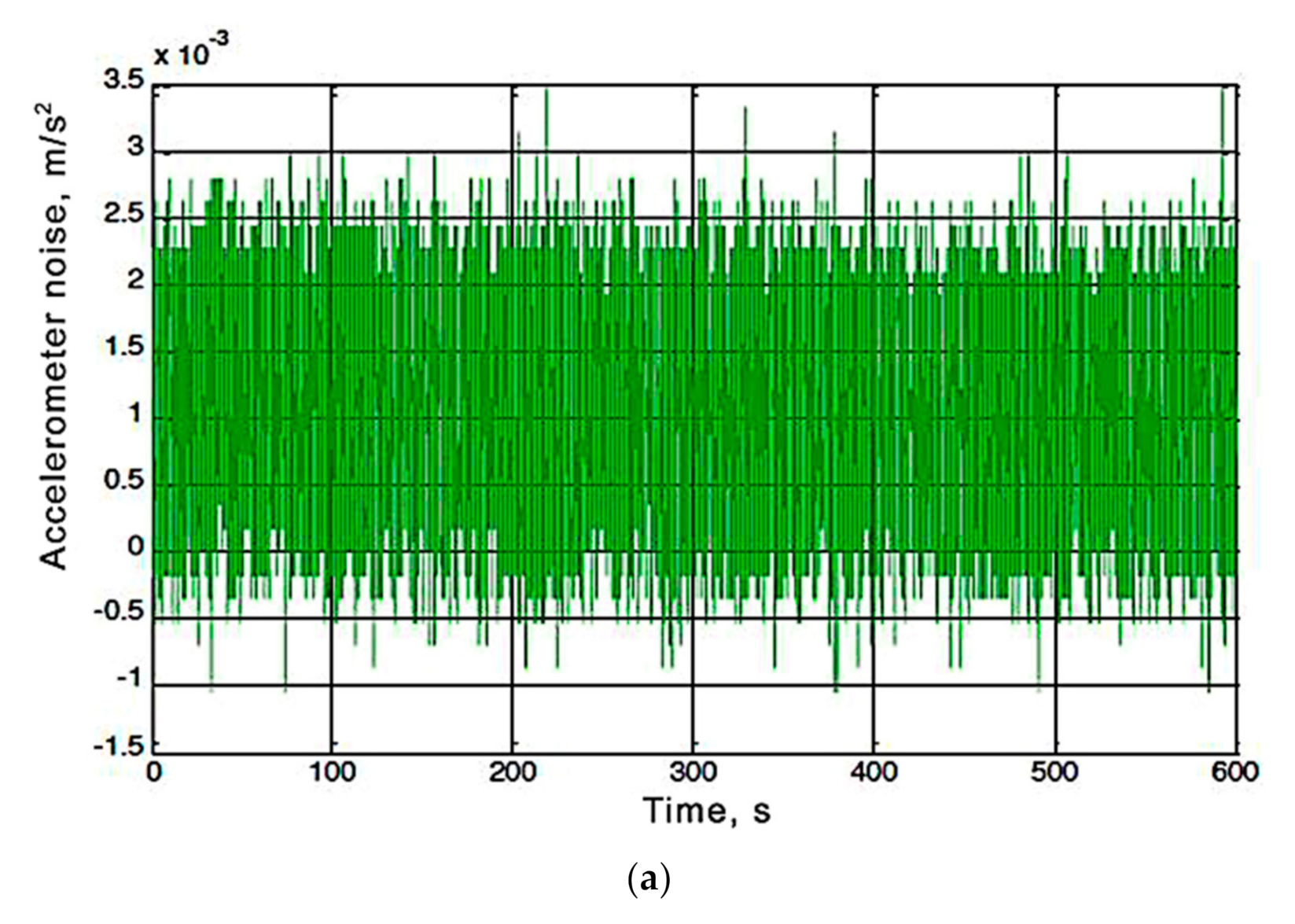
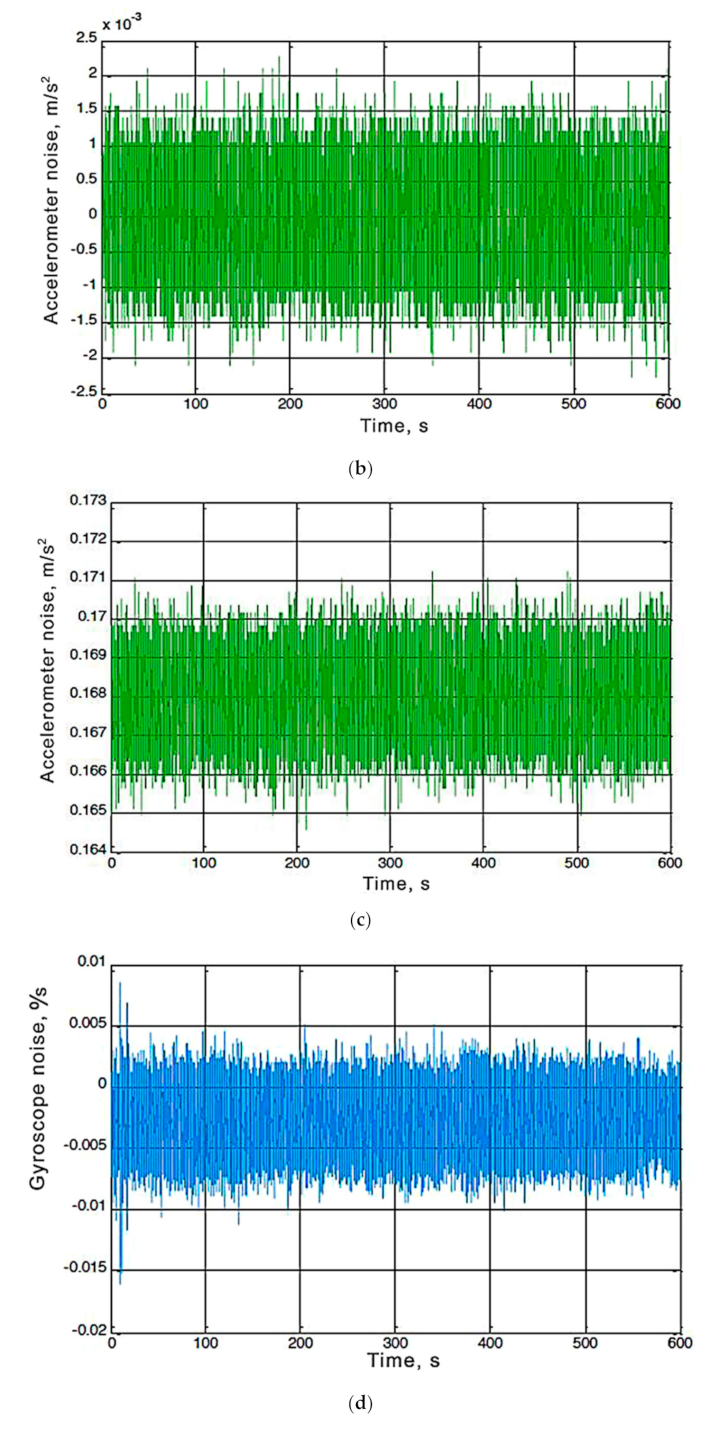
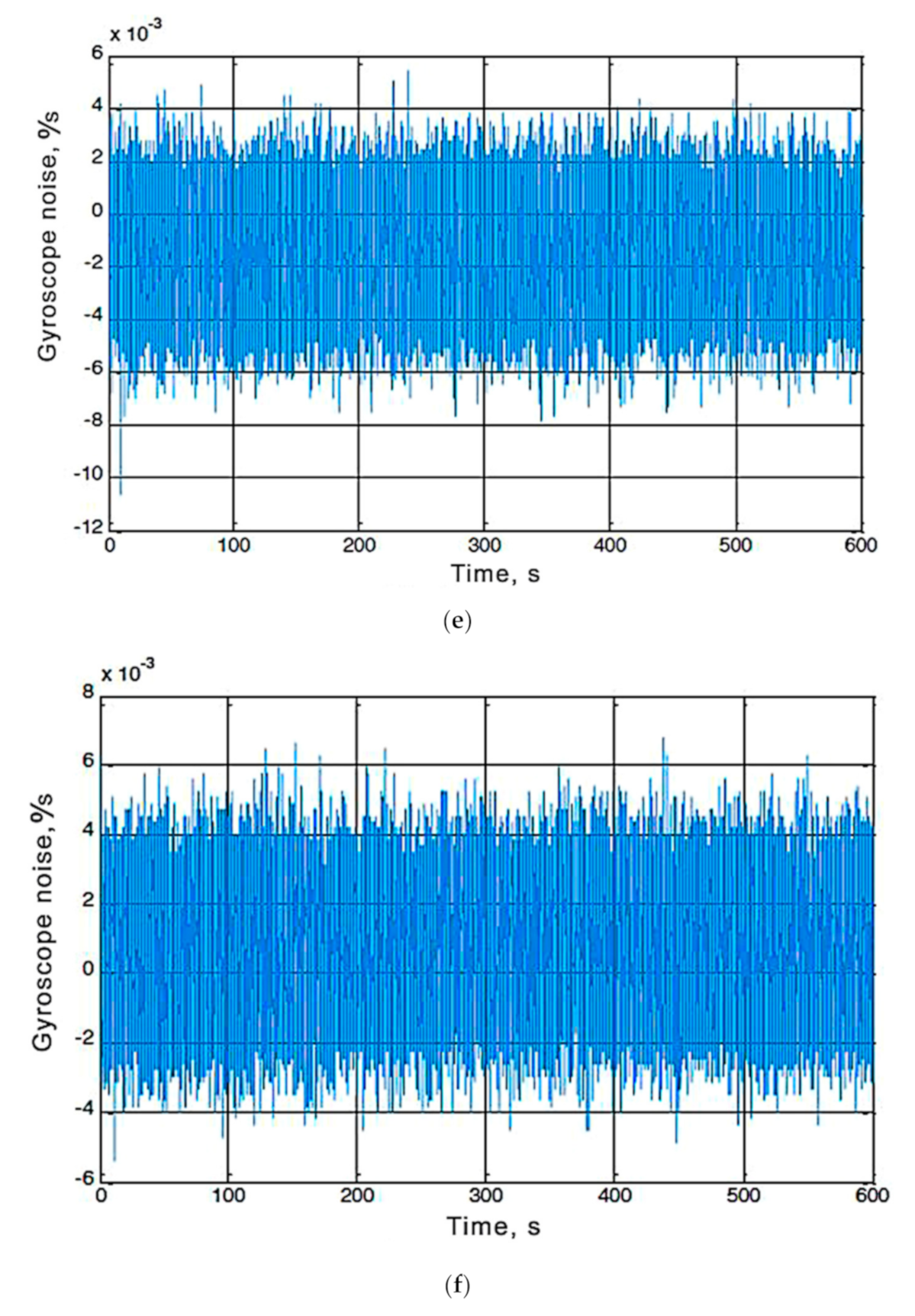
4. Experimental Examination of Noise Parameters of the InvenSense MPU-6050 Gyroscope
5. Calibration of the Gyroscope InvenSense MPU-6050
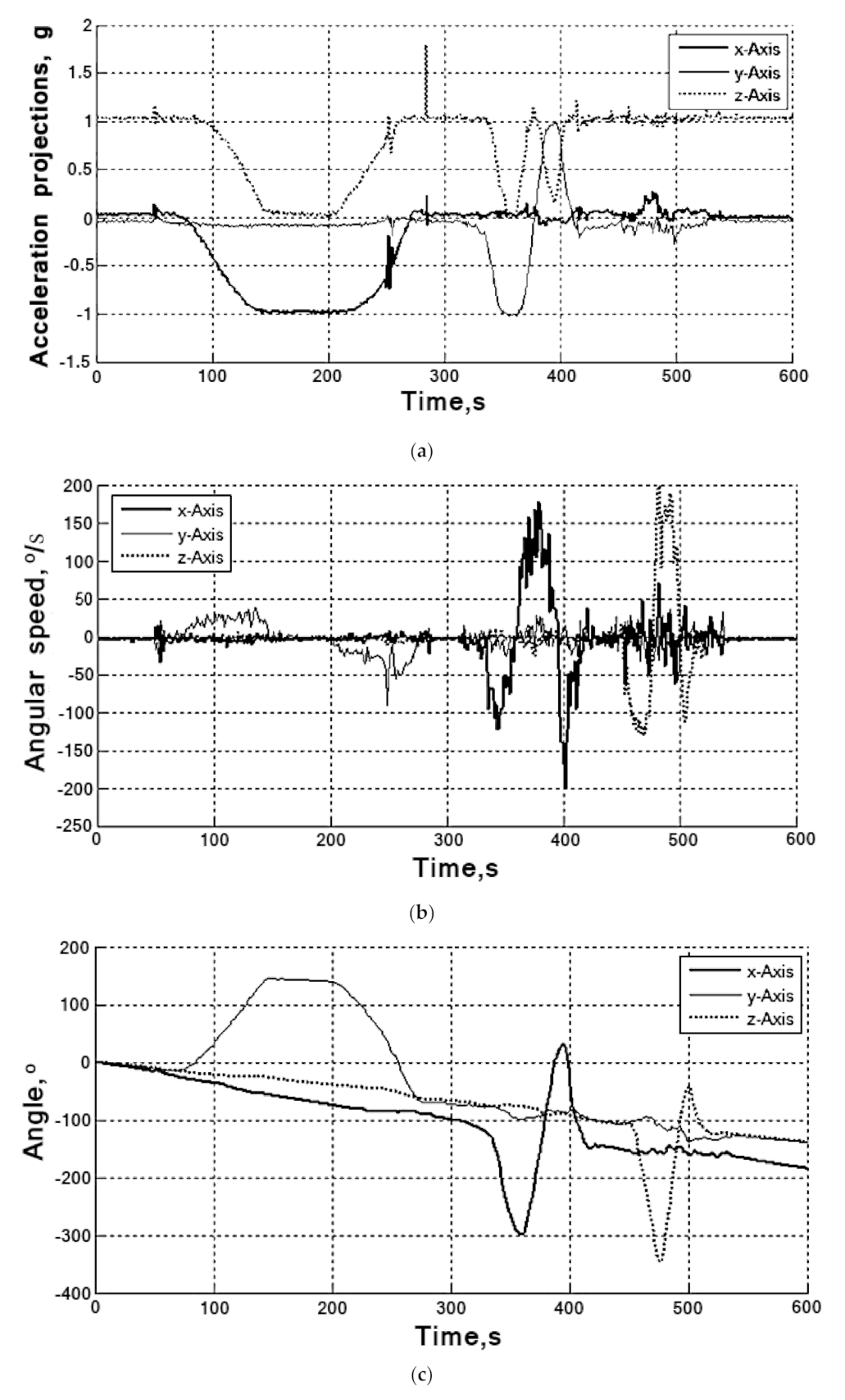
6. Analysis of Output Signals of InvenSense MPU-6050
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ren, Y.; Ke, X.; Liu, Y. MEMS Gyroscope Performance Estimate Based on Allan Variance. In Proceedings of the 2007 8th International Conference on Electronic Measurement and Instruments, Xi’an, China, 16–18 August 2007; pp. 260–263. [Google Scholar] [CrossRef]
- Božek, P.; Ivandić, Ž.; Lozhkin, A.; Lyalin, V.; Tarasov, V. Solutions to the characteristic equation for industrial robot’s elliptic trajectories/Rjesenja karakteristicne jednadzbe za elipticne putanje ndustrijskog robota. Teh. Vjesn. Tech. Gaz. 2016, 23, 1017–1023. [Google Scholar] [CrossRef]
- Arvanitakis, I.; Giannousakis, K.; Tzes, A. Mobile robot navigation in unknown environment based on exploration principles. In Proceedings of the 2016 IEEE Conference on Control Applications (CCA), Buenos Aires, Argentina, 19–22 September 2016; pp. 493–498. [Google Scholar] [CrossRef]
- Corke, P.; Lobo, J.; Dias, J. An introduction to inertial and vision sensing. Int. J. Robot. Res. 2007, 6, 519–535. [Google Scholar] [CrossRef]
- Farrell, J.A. Aided Navigation: GPS with High. Rate Sensors; McGraw Hill Professional: New York, NY, USA, 2008. [Google Scholar]
- Petritoli, E.; Leccese, F.; Leccisi, M. Inertial Navigation Systems for UAV: Uncertainty and Error Measurements. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Torino, Italy, 19–21 June 2019; pp. 218–222. [Google Scholar] [CrossRef]
- Grewal, M.S.; Weill, L.R.; Andrews, A.P. Global Position Systems, Inertial Navigation and Integration; J. Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Gang, L.; Wang, J. PRM path planning optimization algorithm research. WSEAS Trans. Syst. Control. 2016, 11, 81–86. [Google Scholar]
- Pirník, R.; Hruboš, M.; Nemec, D.; Mravec, T.; Božek, P. Integration of Inertial Sensor Data into Control of the Mobile Platform. In Proceedings of the 2015 Federated Conference on Software Development and Object Technologies, SDOT 2015, Zilina, Slovakia, 19–20 November 2015; pp. 271–282. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Spagnolo, G.S. Inertial Navigation Systems (INS) for Drones: Position Errors Model. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 500–504. [Google Scholar] [CrossRef]
- Rudyk, A.V. Analysis of the errors of MEMS accelerometers by the Allan variation method; Bulletin of Zhytomyr State Technological University: Zhytomyr, Ukraine, 2017; pp. 100–109. [Google Scholar]
- IEEE Std 1431-2004. Standard Specification Format Guide and Test Procedure for Coriolis Vibratory Gyros; IEEE: New York, NY, USA, December 2004. [Google Scholar] [CrossRef]
- IEEE Std 952-1997. Standard Specification Format Guide and Test Procedure for Single Axis Interferometric Fiber Optic Gyros; IEEE: New York, NY, USA, February 1998. [Google Scholar] [CrossRef]
- Woodman, O.J. An Introduction to Inertial Navigation. Available online: https://www.cl.cam.ac.uk/techreports/UCAM-CL-TR-696.pdf (accessed on 22 July 2020).
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology; The Institution of Electrical Engineers: Stevenage, UK, 2004. [Google Scholar]
- Matveev, V.V. Strapdown Inertial Systems of Orientation and Navigation: Monograph; LAP Lambert Academic Publishing: Saarbrücken, Germany, 2015. [Google Scholar]
- Jiang, W.; Wang, L.; Niu, X.; Zhang, Q.; Zhang, H.; Tang, M.; Hu, X. High-Precision Image Aided Inertial Navigation with Known Features: Observability Analysis and Performance Evaluation. Sensors 2014, 14, 19371–19401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ko, D.W.; Kim, Y.N.; Lee, J.H.; Suh, I.H. A scene-based dependable indoor navigation system. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1530–1537. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, L.; Huo, G.; Li, R.; Hou, Z.; Luo, P.; Sun, Z.; Wang, K.; Yang, C. Visual Semantic Navigation Based on Deep Learning for Indoor Mobile Robots. Complexity 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Y.; Mumford, P.J.; Rizos, C. Allan Variance Analysis on Error Characters of MEMS Inertial Sensors for an FPGA-Based GPS/INS System. In Proceedings of the International Symposium on GPS/GNSS, Tokyo, Japan, 11–14 November 2008; pp. 127–133. [Google Scholar]
- Kilin, A.; Bozek, P.; Karavaev, Y.; Klekovkin, A.; Shestakov, V. Experimental investigations of a highly maneuverable mobile omniwheel robot. Int. J. Adv. Robot. Syst. 2017, 14, 1–9. [Google Scholar] [CrossRef]
- Zotov, S.A.; Rivers, M.C.; Trusov, A.A.; Shkel, A.M. Folded MEMS Pyramid Inertial Measurement Unit. IEEE Sens. J. 2011, 11, 2780–2789. [Google Scholar] [CrossRef]
- Li, J.; Fang, J. Not Fully Overlapping Allan Variance and Total Variance for Inertial Sensor Stochastic Error Analysis. IEEE Trans. Instrum. Meas. 2013, 62, 2659–2672. [Google Scholar] [CrossRef]
- Niu, G.; Tang, J.; Feng, Z.; Joseph, A.J.; Harame, D.L. Scaling and technological limitations of 1/f noise and oscillator phase noise in SiGe HBTs. IEEE Trans. Microw. Theory Tech. 2005, 53, 506–514. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Božek, P.; Akkad, A.M.; Blištan, P.; Ibrahim, I.N. Navigation Control and Stability Investigation of a Mobile Robot Based on a Hexacopter Equipped with an Integrated Manipulator. Int. J. Adv. Robot. Syst. 2017, 14, 1–13. [Google Scholar] [CrossRef] [Green Version]
- MPU-6000 and MPU-6050. Product Specification. Revision 3.4. Available online: www.invensense.com (accessed on 14 August 2020).
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice Using MATLAB; J. Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Ingle, V.K.; Proakis, J.G. Digital Signal. Processing Using MATLAB; Cengage Learning: Stamford, CT, USA, 2012. [Google Scholar]
- Rudyk, A.; Rudyk, V.; Radul, N.; Matei, M. The influence of the program code structure on the discretization frequency of the onboard computer of a mobile robot. In Proceedings of the III International Scientific and Practical Conference on Modeling, Control and Information Technologies, Rivne, Ukraine, 14–16 November 2019; pp. 212–214. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J.-M. Complementary filter design on the special orthogonal group SO(3). In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 1477–1484. [Google Scholar] [CrossRef] [Green Version]
- Hol, J.D. Pose Estimation and Calibration Algorithms for Vision and Inertial Sensors. Ph.D. Thesis No. 1370, Linköping University, Linköping, Sweden, 2005. [Google Scholar]
- Rudyk, A.; Rudyk, V.; Matei, M. Research and simulation of the local navigation system of terrestrial mobile robot. IAPGOS 2020, 10, 56–61. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Conditions | Min | Typ | Max | Units |
|---|---|---|---|---|---|
| Gyroscope Sensitivity | |||||
| Full-Scale Range | FS_SEL = 0 (3) | ±250 | ±2000 | °/s | |
| Gyroscope ADC Word Length | 16 | bits | |||
| Sensitivity Scale Factor | FS_SEL = 0 (3) | 16.4 | 131 | LSB/(°/s) | |
| Sensitivity Scale Factor Tolerance | 25 °C | −3 | +3 | % | |
| Sensitivity Scale Factor Variation Over Temperature | ±2 | % | |||
| Nonlinearity | Best fit straight line; 25 °C | 0.2 | % | ||
| Cross-Axis Sensitivity | ±2 | % | |||
| Gyroscope Zero-Rate Output (ZRO) | |||||
| Initial ZRO Tolerance | 25 °C | ±20 | °/s | ||
| ZRO Variation Over Temperature | −40 °C to +85 °C | ±20 | °/s | ||
| Power-Supply Sensitivity | 100 mVpp; VDD = 2.5 V | 0.2 | 4 | °/s | |
| Linear Acceleration Sensitivity | Static | 0.1 | °/s/g | ||
| Gyroscope Noise Performance | FS_SEL = 0 | ||||
| Total RMS Noise | DLPFSFG = 2 (100 Hz) | 0.05 | °/s-rms | ||
| Low-frequency RMS Noise | Bandwidth 1 Hz to 10 Hz | 0.033 | °/s-rms | ||
| Rate Noise Spectral Density | At 10 Hz | 0.005 | °/s/√Hz | ||
| Gyroscope Start-Up Time | DLPFCFG = 0 | ||||
| ZRO Setting (from power-on) | to ±1°/s of Final | 30 | ms | ||
| Accelerometer Sensitivity | |||||
| Full-Scale Range | AFS_SEL = 0 (3) | ±2 | ±16 | g | |
| Accelerometer ADC Word Length | In two’s component format | 16 | bits | ||
| Sensitivity Scale Factor | AFS_SEL = 0 (3) | 2.048 | 16.384 | LSB/g | |
| Initial Calibration Tolerance | ±3 | % | |||
| Sensitivity Change vs. Temperature | −40 °C to +85 °C | ±0.02 | %/°C | ||
| Nonlinearity | Best fit straight line; 25 °C | 0.5 | % | ||
| Cross-Axis Sensitivity | ±2 | % | |||
| Zero-G Output | |||||
| Initial Calibration Tolerance | X and Y axes | ±50 | mg | ||
| Z axis | ±80 | mg | |||
| Zero-G Level Change vs. Temperature | X and Y axes, 0 °C to +70 °C Z axis, 0 °C to +70 °C | ±35 ±60 | mg mg | ||
| Accelerometer Noise Performance | |||||
| Power Spectral Density | @10 Hz, ODR = 1 kHz | 400 | μg/√Hz | ||
| Intelligence Function Increment | 32 | mg/LSB |
| Angular Velocity Value ωzi, o/s | Measured Calibration Value of Angular Velocity ωGi, o/s | Absolute Measurement Error for the Gyroscope Angular Velocity during Calibration Δωi, o/s | ||||
|---|---|---|---|---|---|---|
| Axis X | Axis Y | Axis Z | Axis X | Axis Y | Axis Z | |
| −150 | −149.7543 | −149.9781 | −149.8478 | −0.2457 | −0.0219 | −0.1522 |
| −120 | −119.6212 | −119.6256 | −119.6116 | −0.3788 | −0.3744 | −0.3884 |
| −100 | −100.2933 | −100.3465 | −100.2131 | 0.2933 | 0.3465 | 0.2131 |
| −80 | −79.9559 | −80.0618 | −80.0617 | −0.0441 | 0.0618 | 0.0617 |
| −60 | −60.0673 | −59.9267 | −60.1414 | 0.0673 | −0.0133 | 0.1414 |
| −40 | −39.8056 | −39.8653 | −39.9171 | −0.1944 | −0.2347 | −0.0829 |
| −20 | −19.6373 | −19.7184 | −19.8632 | −0.3427 | −0.2816 | −0.1368 |
| 0 | 0.013588 | −0.003654 | 0.007436 | −0.013588 | 0.003654 | −0.007436 |
| 20 | 20.2334 | 20.0129 | 19.8463 | −0.2334 | −0.0129 | 0.1537 |
| 40 | 39.9792 | 39.9491 | 39.9158 | 0.0208 | 0.0509 | 0.0842 |
| 60 | 60.1866 | 60.1149 | 60.2033 | −0.1866 | −0.1149 | −0.2033 |
| 80 | 80.1018 | 80.0238 | 80.0788 | −0.1018 | −0.0238 | −0.0788 |
| 100 | 100.5863 | 100.3816 | 100.3497 | −0.5863 | −0.3816 | −0.3497 |
| 120 | 119.9062 | 119.7367 | 119.9022 | 0.0938 | 0.2633 | 0.0978 |
| 150 | 150.0168 | 150.0816 | 150.0365 | −0.0168 | −0.0816 | −0.0365 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rudyk, A.V.; Semenov, A.O.; Kryvinska, N.; Semenova, O.O.; Kvasnikov, V.P.; Safonyk, A.P. Strapdown Inertial Navigation Systems for Positioning Mobile Robots—MEMS Gyroscopes Random Errors Analysis Using Allan Variance Method. Sensors 2020, 20, 4841. https://doi.org/10.3390/s20174841
Rudyk AV, Semenov AO, Kryvinska N, Semenova OO, Kvasnikov VP, Safonyk AP. Strapdown Inertial Navigation Systems for Positioning Mobile Robots—MEMS Gyroscopes Random Errors Analysis Using Allan Variance Method. Sensors. 2020; 20(17):4841. https://doi.org/10.3390/s20174841
Chicago/Turabian StyleRudyk, Andrii V., Andriy O. Semenov, Natalia Kryvinska, Olena O. Semenova, Volodymyr P. Kvasnikov, and Andrii P. Safonyk. 2020. "Strapdown Inertial Navigation Systems for Positioning Mobile Robots—MEMS Gyroscopes Random Errors Analysis Using Allan Variance Method" Sensors 20, no. 17: 4841. https://doi.org/10.3390/s20174841
APA StyleRudyk, A. V., Semenov, A. O., Kryvinska, N., Semenova, O. O., Kvasnikov, V. P., & Safonyk, A. P. (2020). Strapdown Inertial Navigation Systems for Positioning Mobile Robots—MEMS Gyroscopes Random Errors Analysis Using Allan Variance Method. Sensors, 20(17), 4841. https://doi.org/10.3390/s20174841