Assessment of the Speed Management Impact on Road Traffic Safety on the Sections of Motorways and Expressways Using Simulation Methods

 ,
,  ,
,  , , and
, , and
Abstract
:1. Introduction
2. Simulation Methods of Road Safety Assessment
- -
- -
- -
- -
2.1. Microsimulation Modelling Studies
2.2. Driving Simulator Studies
- -
- possibility of using proactive research methods,
- -
- generally unlimited possibility of defining the road environment according to the criteria assumed by the researcher,
- -
- high level of detail and scope of collected data,
- -
- ensuring the safety of test participants even for tests that would be dangerous in the real environment.
2.3. Application of Sensors to Improve Road Traffic Safety and SSM-Related Microsimulation Studies
- -
- estimation of the traffic state in which data from different traffic sensors and traffic flow models fed by them are used to reproduce the traffic state picture of the whole road network (e.g., in terms of traffic density, speed and current dynamics of changes in traffic parameter values),
- -
- prediction of the traffic state in which traffic projection in the future is calculated (short-term predictions are used to address traffic control issues),
- -
- optimisation of traffic control measures (e.g., algorithms such as route guidance, VSLs, ramp metering, incident detection, etc.), the results of which are transmitted to the traffic control systems using actuators (traffic signals, VMSs, other roadside or in-vehicle information panels, etc.), including emergency events when traffic incident management is activated.
3. Methodology and Selected Results of Research
3.1. Development and Calibration of the Microscopic Test Models
- -
- 120 km/h ≤ 1000 veh/h/lane,
- -
- 100 km/h > 1000 veh/h/lane,
- -
- 80 km/h > 1550 veh/h/lane (if the VMS series was used, a speed limit of 100 km/h was displayed on the first VMS after the interchange and a limit of 80 km/h on the subsequent VMS. If one sign was located on the road section between the interchanges, a speed limit of 100 km/h was displayed on it, which followed the applicable regulations).
3.2. Driving Simulator Study Results
3.3. Microscopic Modelling Results
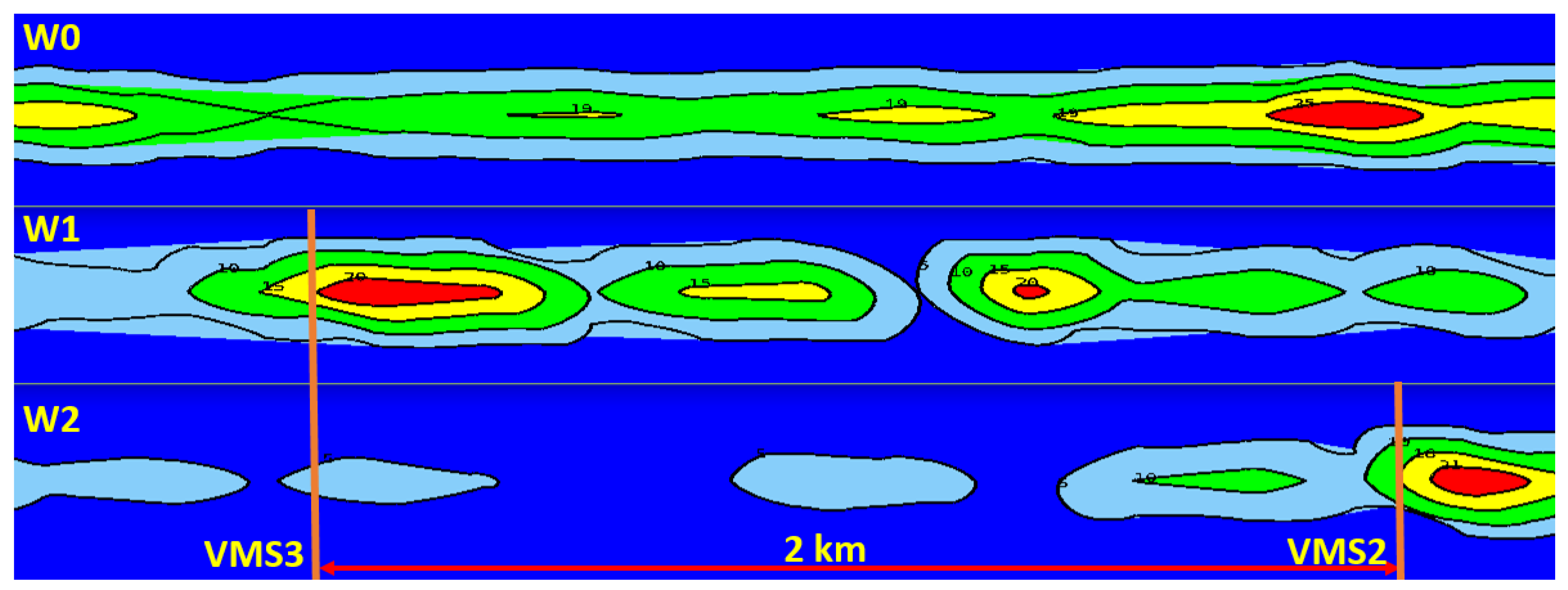
3.3.1. Location of Variable Message Signs
- -
- W0—a baseline scenario—no service (VMS),
- -
- W1—one VMS between interchanges,
- -
- W2—VMSs between interchanges placed every two kilometres.
- X—vehicle position,
- —vehicle speed,
- i—vehicle following the leader,
- i−1—lead vehicle,
- t—moment in time,
- l—vehicle length.
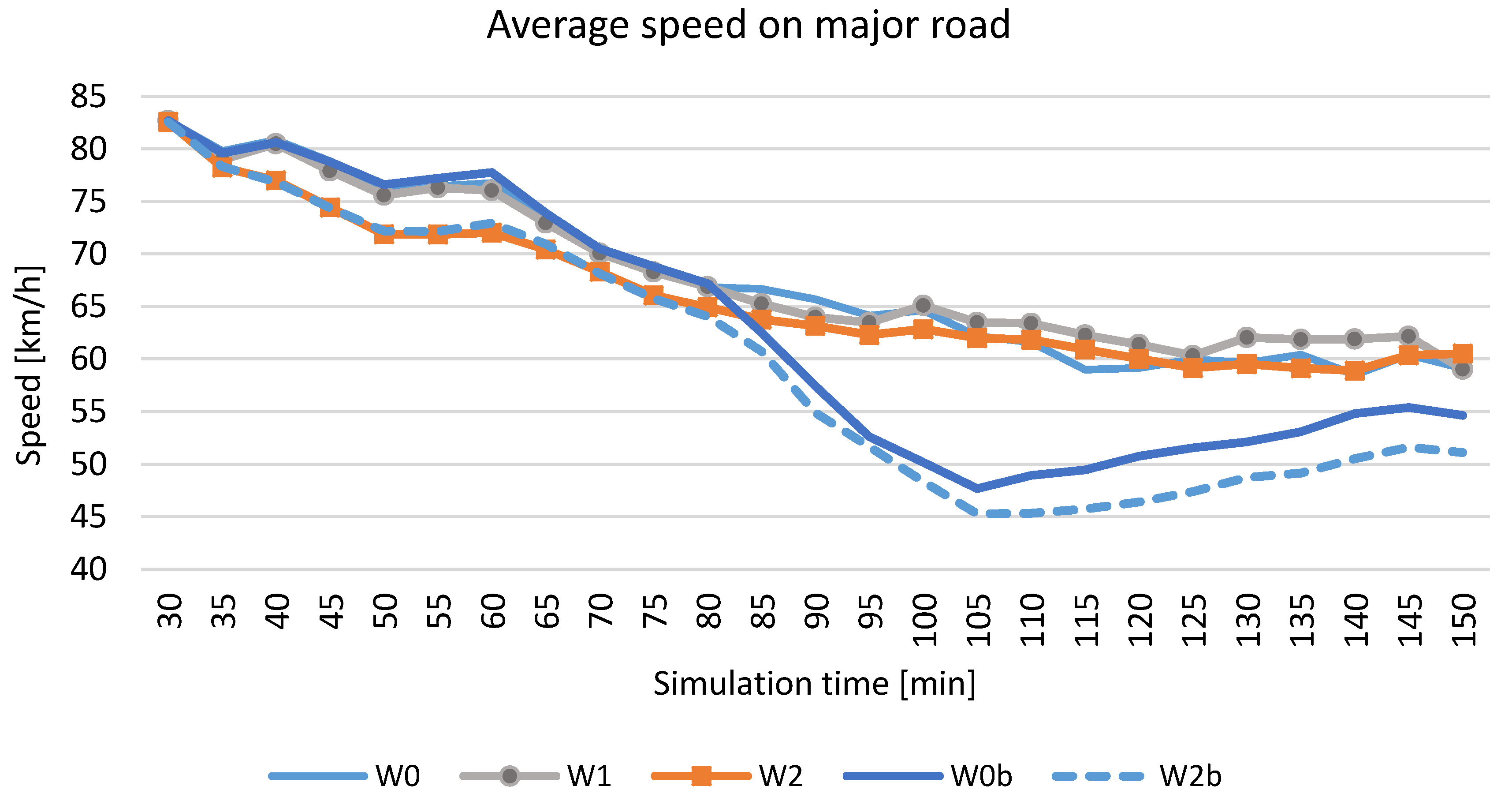
3.3.2. Comparison of Scenarios Taking into Account the Occurrence of Incidents
- W0—a baseline scenario—no ITS service (VMS),
- W2—VMSs between interchanges located every two kilometres,
- W0b—a baseline scenario—no ITS service (VMS), the occurrence of an incident,
- W2b—VMSs between interchanges located every two kilometres, the occurrence of an incident.
4. Discussing the Results and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Randolph, L. Texas Variable Speed Limit Pilot Project. In Proceedings of the National Rural Intelligent Transport Systems Conference, San Antonio, TX, USA, 2015. [Google Scholar]
- Fudala, N.J.; Fontaine, M.D. Work Zone Variable Speed Limit Systems: Effectiveness and System Design Issues; FHWA/VTRC 10-R20; Virginia Department of Transportation: Fairfax, VA, USA, 2010. [Google Scholar]
- Garcia-Castro, A.; Monzon, A. Homogenization effects of variable speed limits, transp. Telecommun. J. 2014, 15, 130–143. [Google Scholar] [CrossRef] [Green Version]
- Papageorgiou, M.; Kosmatopoulos, E.; Papamichail, I. Effects of variable speed limits on motorway traffic flow. Transp. Res. Rec. J. Transp. Res. Board 2008, 2047, 37–48. [Google Scholar] [CrossRef]
- Abdel-Aty, M.; Dilmore, J.; Dhindsa, A. Evaluation of variable speed limits for real-time freeway safety improvement. Accid. Anal. Prev. 2006, 38, 335–345. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Li, Y.; Liu, P.; Wang, W.; Xu, C. Development of a variable speed limit strategy to reduce secondary collision risks during inclement weathers. Accid. Anal. Prev. 2014, 72, 134–145. [Google Scholar] [CrossRef]
- Polish Road Safety Observatory. Available online: http://www.obserwatoriumbrd.pl (accessed on 23 July 2020).
- Zielińska, A. Report on the Implementation of Task 2.1 within the Framework of the Project Entitled “Impact of the Usage of Intelligent Transport Systems Services on the Level of Road Safety” (RID-4D); Motor Transport Institute: Warsaw, Poland, 2018. [Google Scholar]
- Oskarbski, J.; Gumińska, L.; Marcinkowski, T.; Mowiński, K.; Oskarbska, I.; Oskarbski, G.; Zawisza, M.; Żarski, K. Methodology of research on the impact of ITS services on the safety and efficiency of road traffic using transport models. MATEC Web Conf. 2018, 231, 02008. [Google Scholar] [CrossRef] [Green Version]
- Dijkstra, E.; Bald, A.; Benz, S.; Gaitanidou, T. Overview of resulting tools, guidelines, and instruments. IN-SAFETY workpackage 3: New models, tools and guidelines for road safety assessment, deliverable 3.4. SWOV 2008, 35, 24. [Google Scholar]
- Nilsson, G. Traffic Safety Dimensions and the Power Model to Describe the Effect of Speed on Safety. Ph.D. Thesis, Lund University, Lund, Sweden, 2004. [Google Scholar]
- Elvik, R. Assessing the validity of road safety evaluation studies by analysing causal chains. Accid. Anal. Prev. 2003, 35, 741–748. [Google Scholar] [CrossRef]
- Washington, S.; Persaud, B.; Lyon, C.; Oh, J. Validation of Accident Models for Intersections; FHWA-RD-03-037; Federal Highway Administration: Washington, DC, USA, 2005.
- Roshandel, S.; Zheng, Z.; Washington, S. Impact of real-time traffic characteristics on freeway crash occurrence: Systematic review and meta-analysis. Accid. Anal. Prev. 2015, 79, 198–211. [Google Scholar] [CrossRef]
- Reurings, M.; Janssen, T.; Eenink, R.; Elvik, R.; Cardoso, J.; Stefan, C. First deliverable of WP2 of the Ripcord-Iserest project. In Accident Prediction Models and Road Safety Impact Assessment: A State of the Art; Institute for Road Safety Research: The Hague, The Netherlands, 2006. [Google Scholar]
- Kustra, W.; Jamroz, K.; Budzynski, M. Safety PL—A support tool for road safety impact assessment. Transp. Res. Procedia 2016, 14, 3456–3465. [Google Scholar] [CrossRef] [Green Version]
- Part, D. Highway Safety Manual; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2010. [Google Scholar]
- Bonneson, J.; Geedipally, S.; Pratt, M.P.; Lord, D. Safety Prediction Methodology and Analysis Tool for Freeways and Interchanges; Project No. 17-45; National Cooperative Highway Research Program Transportation Research Board of The National Academies: Washington, DC, USA, 2012. [Google Scholar]
- Hauer, E. Observational before/after Studies in Road Safety; Pergamon: Oxford, UK, 1997. [Google Scholar]
- Hauer, E.; Harwood, D.W.; Council, F.M.; Griffith, M.S. Estimating safety by the empirical bayes method: A tutorial. Transp. Res. Rec. 2002, 126–131. [Google Scholar] [CrossRef]
- Council, F.M.; Harwood, D.W.; Hauer, E.; Hughes, W.E.; Vogt, A. Prediction of the Expected Safety Performance of Rural Two-Lane Highways; Publication No. FHWA-RD-99-207; Federal Highway Administration: Washington, DC, USA, 2000. [Google Scholar]
- Elvik, R. The predictive validity of empirical Bayes estimates of road safety. Accid. Anal. Prev. 2008, 40, 1964–1969. [Google Scholar] [CrossRef] [PubMed]
- Elvik, R.; Hoye, A.; Vaa, T.; Sorensen, M. The Handbook of Road Safety Measures; Emerald Group Publishing: Bingley, UK, 2009. [Google Scholar]
- Hauer, E. Identification of sites with promise. Transp. Res. Rec. J. Transp. Res. Board 1996, 1542, 54–60. [Google Scholar] [CrossRef]
- Higle, J.; Hecht, M. A comparison of techniques for the identification of hazardous locations. Transp. Res. Rec. 1989, 1238, 10–19. [Google Scholar]
- Higle, J.L.; Witkowski, J.M. Bayesian identification of hazardous locations. Transp. Res. Rec. 1988, 1185, 24–36. [Google Scholar]
- Sayed, T.; Brown, G.; Navin, F. Simulation of traffic conflicts at unsignalized intersections with TSC-Sim. Accid. Anal. Prev. 1994, 26, 593–607. [Google Scholar] [CrossRef]
- Kaub, A. Highway corridor safety levels of service based on annual risk of injury. In Proceedings of the 79th Transportation Research Board Annual Meeting, Washington, DC, USA, 9–13 January 2000. [Google Scholar]
- Cafiso, S.; D’Agostino, C.; Bąk, R.; Kieć, M. The assessment of road safety for passing relief lanes using microsimulation and traffic conflict analysis. Adv. Transp. Stud. Int. J. 2016, 2, 55–64. [Google Scholar]
- Archer, J. Indicators for Traffic Safety Assessment and Prediction and Their Application in Micro-Simulation Modelling: A Study of Urban and Suburban Intersections; Royal Institute of Technology: Stockholm, Sweden, 2005. [Google Scholar]
- Ghanim, M.S.; Shaaban, K. A case study for surrogate safety assessment model in predicting real-life conflicts. Arab. J. Sci. Eng. 2019, 44, 4225–4231. [Google Scholar] [CrossRef]
- Wu, J.; Radwan, E.; Abou-Senna, H. Determination if VISSIM and SSAM could estimate pedestrian-vehicle conflicts at signalized intersections. J. Transp. Saf. Secur. 2018, 10, 572–585. [Google Scholar] [CrossRef]
- Vasconcelos, L.; Neto, L.; Seco, Á.M.; Silva, A.B. Validation of the surrogate safety assessment model for assessment of intersection safety. Transp. Res. Rec. J. Transp. Res. Board 2014, 2432, 1–9. [Google Scholar] [CrossRef]
- Oskarbski, J.; Zarski, K. Methodology of research on the impact of ramp metering on the safety and efficiency of road traffic using transport models. In Proceedings of the 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Cracow, Poland, 5–7 June 2019. [Google Scholar]
- Dingus, T.A.; Neale, V.L.; Klauer, S.G.; Petersen, A.D.; Carroll, R.J. The development of a naturalistic data collection system to perform critical incident analysis: An investigation of safety and fatigue issues in long-haul trucking. Accid. Anal. Prev. 2006, 38, 1127–1136. [Google Scholar] [CrossRef]
- Guo, F.; Klauer, S.G.; Hankey, J.M.; Dingus, T.A. Near crashes as crash surrogate for naturalistic driving studies. Transp. Res. Rec. J. Transp. Res. Board 2010, 2147, 66–74. [Google Scholar] [CrossRef]
- Wu, K.-F.; Jovanis, P.P. Crashes and crash-surrogate events: Exploratory modeling with naturalistic driving data. Accid. Anal. Prev. 2012, 45, 507–516. [Google Scholar] [CrossRef] [PubMed]
- Bagdadi, O. Assessing safety critical braking events in naturalistic driving studies. Transp. Res. Part F Traffic Psychol. Behav. 2013, 16, 117–126. [Google Scholar] [CrossRef]
- Van der Horst, A.R.A. Video-Recorded Accidents, Conflicts and Road User Behaviour: A Step Forward in Traffic Safety Research; Palmero Ediciones: Valencia, Spain, 2007. [Google Scholar]
- Saunier, N.; Mourji, N.; Agard, B. Mining microscopic data of vehicle conflicts and collisions to investigate collision factors. Transp. Res. Rec. J. Transp. Res. Board 2011, 2237, 41–50. [Google Scholar] [CrossRef]
- Van Nes, N.; Christoph, M.; Hoedemaeker, M.; van der Horst, R. The value of site-based observations complementary to naturalistic driving observations: A pilot study on the right turn manoeuvre. Accid. Anal. Prev. 2013, 58, 318–329. [Google Scholar] [CrossRef]
- Gettman, D.; Head, L. Surrogate safety measures from traffic simulation models. Transp. Res. Rec. J. Transp. Res. Board 2003, 1840, 104–115. [Google Scholar] [CrossRef] [Green Version]
- Xin, W.; Hourdos, J.; Michalopoulos, P. Enhanced Micro-Simulation Models for Accurate Safety Assessment of Traffic Management ITS Solutions; CTS 08-17; University of Minnesota Center for Transportation Studies: Minneapolis, MN, USA, 2008. [Google Scholar]
- De Ceunynck, T.; Ariën, C.; Brijs, K.; Brijs, T.; van Vlierden, K.; Kuppens, J.; van der Linden, M.; Wets, G. Proactive evaluation of traffic signs using a traffic sign simulator. Eur. J. Transp. Infrastruct. Res. 2015, 15, 184–204. [Google Scholar] [CrossRef]
- Godley, S.T.; Triggs, T.J.; Fildes, B.N. Driving simulator validation for speed research. Accid. Anal. Prev. 2002, 34, 589–600. [Google Scholar] [CrossRef]
- Bella, F. Can driving simulators contribute to solving critical issues in geometric design? Transp. Res. Rec. 2009, 2138, 120–126. [Google Scholar] [CrossRef]
- Yan, X.; Abdel-Aty, M.; Radwan, E.; Wang, X.; Chilakapati, P. Validating a driving simulator using surrogate safety measures. Accid. Anal. Prev. 2008, 40, 274–288. [Google Scholar] [CrossRef]
- Van Haperen, W. Review of Current Study Methods for VRU Safety. Appendix 5—Systematic Literature Review: Behavioural 0bservations; No. 635895; InDeV: Lund, Sweden, 2016. [Google Scholar]
- Bonsall, P.; Liu, R.; Young, W. Modelling safety-related driving behaviour—Impact of parameter values. Transp. Res. Part A Policy Pract. 2005, 39, 425–444. [Google Scholar] [CrossRef] [Green Version]
- Minderhoud, M.M.; Bovy, P.H.L. Extended time-to-collision measures for road traffic safety assessment. Accid. Anal. Prev. 2001, 33, 89–97. [Google Scholar] [CrossRef]
- Gettman, D.; Sayed, T.; Pu, L.; Shelby, S. Surrogate Safety Assessment Model and Validation; Publication No. Fhwa-Hrt-08-051; Federal Highway Administration: Washington, DC, USA, 2008. [Google Scholar] [CrossRef] [Green Version]
- Bevrani, K.; Chung, E. An examination of the microscopic simulation models to identify traffic safety indicators. Int. J. Intell. Transp. Syst. Res. 2012, 10, 66–81. [Google Scholar] [CrossRef] [Green Version]
- Golob, T.F.; Recker, W.W.; Alvarez, V.M. Freeway safety as a function of traffic flow. Accid. Anal. Prev. 2004, 36, 933–946. [Google Scholar] [CrossRef]
- Evans, L.; Wasielewski, P. Risky driving related to driver and vehicle characteristics. Accid. Anal. Prev. 1983, 15, 121–136. [Google Scholar] [CrossRef]
- Davis, G.A.; Swenson, T. Collective responsibility for freeway rear-ending accidents? An application of probabilistic causal models. Accid. Anal. Prev. 2006, 38, 728–736. [Google Scholar] [CrossRef]
- Essa, M.; Sayed, T. Traffic conflict models to evaluate the safety of signalized intersections at the cycle level. Transp. Res. Part C Emerg. Technol. 2018, 89, 289–302. [Google Scholar] [CrossRef]
- Perkins, S.R.; Harris, J.L. Traffic conflict characteristics-accident potential at intersections (Paper sponsored by Committee on Traffic Safety and presented at the 47th Annual Meeting). In Traffic Safety Accident Research Highway Research. Recovery; Highway Research Board: Washington, DC, USA, 1968; pp. 35–43. [Google Scholar]
- Hydén, C. The development of a method for traffic safety evaluation: The Swedish traffic conflicts technique. In Bulletin Lund Institute of Technology, Department; Trafikteknik Tekniska Hoegskdan i Lund: Lund, Sweden, 1987; p. 57. [Google Scholar]
- Svensson, Å. A Method for Analysing the Traffic Process in a Safety Perspective; Lund University: Lund, Sweden, 1998. [Google Scholar]
- Lord, D.; Washington, S. Safe Mobility: Challenges, Methodology and Solutions (Transport and Sustainability); Emerald Publishing: Bingley, UK, 2018; Volume 11. [Google Scholar]
- PIARC. Road Safety Manual; World Road Association PIARC: Paris, France, 2004. [Google Scholar]
- Fisher, D.L.; Rizzo, M.; Caird, J.K.; Lee, J.D. Handbook of Driving Simulation for Engineering, Medicine, and Psychology; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Lee, J.D.; Young, K.L.; Regan, M.A. Defining driver distraction. In Driver Distraction: Theory, Effects, and Mitigation; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Pettitt, M.; Burnett, G.; Stevens, A. Defining driver distraction. In Proceedings of the 12th World Congress on Intelligent Transport Systems, San Francisco, CA, USA, 6–10 November 2005. [Google Scholar]
- Peng, Y.; Boyle, L.N.; Hallmark, S.L. Driver’s lane keeping ability with eyes off road: Insights from a naturalistic study. Accid. Anal. Prev. 2013, 50, 628–634. [Google Scholar] [CrossRef]
- Horberry, T.; Anderson, J.; Regan, M.A.; Triggs, T.J.; Brown, J. Driver distraction: The effects of concurrent in-vehicle tasks, road environment complexity and age on driving performance. Accid. Anal. Prev. 2006, 38, 185–191. [Google Scholar] [CrossRef]
- Blaschke, C.; Breyer, F.; Färber, B.; Freyer, J.; Limbacher, R. Driver distraction based lane-keeping assistance. Transp. Res. Part F Traffic Psychol. Behav. 2009, 12, 288–299. [Google Scholar] [CrossRef]
- Klauer, S.G.; Dingus, T.A.; Neale, V.L.; Sudweeks, J.D.; Ramsey, D.J. The Impact of Driver Inattention on Near-Crash/Crash Risk: An Analysis Using the 100-Car Naturalistic Driving Study Data; Publication No. DOT HS 810 594; National Highway Traffic Safety Administration: Washington, DC, USA, 2006.
- He, J.; McCarley, J.S.; Kramer, A.F. Lane keeping under cognitive load: Performance changes and mechanisms. Hum. Factors 2014, 56, 414–426. [Google Scholar] [CrossRef] [PubMed]
- Guerrero-Ibáñez, J.; Zeadally, S.; Contreras-Castillo, J. Sensor technologies for intelligent transportation systems. Sensors 2018, 18, 1212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, J.; Wu, J. Research on adaptive cruise control based on curve radius prediction. In Proceedings of the 2017 2nd International Conference on Image, Vision and Computing (ICIVC), Chengdu, China, 2–4 June 2017. [Google Scholar] [CrossRef]
- Bulumulle, G.; Bölöni, L. A study of the automobile blind-spots’ spatial dimensions and angle of orientation on side-sweep accidents. In Proceedings of the 2016 Symposium on Theory of Modeling and Simulation (TMS-DEVS), Pasadena, CA, USA, 3–6 April 2016. [Google Scholar] [CrossRef]
- Kim, S.G.; Kim, J.E.; Yi, K.; Jung, K.H. Detection and tracking of overtaking vehicle in blind spot area at night time. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 8–10 January 2017. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Nguyen, H.-L.T.; Wang, C.-H. Adaptive neuro-fuzzy predictive control for design of adaptive cruise control system. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017. [Google Scholar] [CrossRef]
- Tarko, A.; Romero, M.A.; Bandura, V.K.; Ariyur, K.B.; Lizarazo, C.G. Feasibility of Tracking Vehicles at Intersections with a Low-end LiDAR. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Katzourakis, D.I.; Lazic, N.; Olsson, C.; Lidberg, M.R. Driver steering override for lane-keeping aid using computer-aided engineering. IEEE/ASME Trans. Mechatron. 2015, 20, 1543–1552. [Google Scholar] [CrossRef]
- Astarita, V.; Festa, D.C.; Giofrè, V.P. Mobile systems applied to traffic management and safety: A state of the art. Procedia Comput. Sci. 2018, 134, 407–414. [Google Scholar] [CrossRef]
- Guido, G.; Vitale, A.; Saccomanno, F.F.; Festa, D.C.; Astarita, V.; Rogano, D.; Gallelli, V. Using smartphones as a tool to capture road traffic attributes. Appl. Mech. Mater. 2013, 432, 513–519. [Google Scholar] [CrossRef]
- Bar-Gera, H. Evaluation of a cellular phone-based system for measurements of traffic speeds and travel times: A case study from Israel. Transp. Res. Part C Emerg. Technol. 2007, 15, 380–391. [Google Scholar] [CrossRef]
- Guido, G.; Vitale, A.; Saccomanno, F.; Gallelli, V. Sensitivity of simulated vehicle tracking profiles for input into safety performance analysis. Adv. Transp. Stud. 2016, 2, 65–74. [Google Scholar]
- Guido, G.; Vitale, A.; Astarita, V.; Saccomanno, F.; Giofré, V.P.; Gallelli, V. Estimation of safety performance measures from smartphone sensors. Procedia Soc. Behav. Sci. 2012, 54, 1095–1103. [Google Scholar] [CrossRef] [Green Version]
- Bierlaire, M.; Chen, J.; Newman, J. Modeling Route Choice Behavior from Smartphone GPS Data; TRANSP-OR 101016; Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 2010. [Google Scholar]
- Barbagli, B.; Manes, G.; Facchini, R.; Marta, S.; Manes, A. Acoustic sensor network for vehicle traffic monitoring. In Proceedings of the the 1st International Conference on Advances in Vehicular Systems, Technologies and Applications (VEHICULAR 2012), Venice, Italy, 24–29 June 2012; pp. 1–6. [Google Scholar]
- Zhou, Y.; Dey, K.C.; Chowdhury, M.; Wang, K.-C. Process for evaluating the data transfer performance of wireless traffic sensors for real-time intelligent transportation systems applications. IET Intell. Transp. Syst. 2017, 11, 18–27. [Google Scholar] [CrossRef]
- Geetha, S.; Cicilia, D. IoT enabled intelligent bus transportation system. In Proceedings of the 2017 2nd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 19–20 October 2017. [Google Scholar] [CrossRef]
- Ki, Y.K. Accident detection system using image processing and MDR. Int. J. Comput. Sci. Netw. Secur. 2007, 7, 35–39. [Google Scholar]
- Desai, G.; Ambre, V.; Jakharia, S.; Sherkhane, S. Smart road surveillance using image processing. In Proceedings of the 2018 International Conference on Smart City and Emerging Technology (ICSCET), Mumbai, Indai, 5 January 2018. [Google Scholar] [CrossRef]
- Saunier, N.; Sayed, T.; Ismail, K. Large-scale automated analysis of vehicle interactions and collisions. Transp. Res. Rec. J. Transp. Res. Board 2010, 2147, 42–50. [Google Scholar] [CrossRef] [Green Version]
- Haugen, T.; Levy, J.R.; Aakre, E.; Tello, M.E.P. Weigh-in-motion equipment—Experiences and challenges. Transp. Res. Procedia 2016, 14, 1423–1432. [Google Scholar] [CrossRef] [Green Version]
- Fu, C.; Liu, H. Investigating influence factors of traffic violations at signalized intersections using data gathered from traffic enforcement camera. PLoS ONE 2020, 15, e0229653. [Google Scholar] [CrossRef]
- Jang, J.A.; Kim, H.S.; Cho, H.B. Smart roadside system for driver assistance and safety warnings: Framework and applications. Sensors 2011, 11, 7420–7436. [Google Scholar] [CrossRef] [PubMed]
- Grumert, E.; Tapani, A.; Ma, X. Evaluation of four control algorithms used in variable speed limit systems. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washinton, DC, USA, 20–29 June 2016; pp. 16–2880. [Google Scholar]
- Barceló, J.; Montero, L.; Bullejos, M.; Serch, O.; Carmona, C. A kalman filter approach for exploiting bluetooth traffic data when estimating time-dependent od matrices. J. Intell. Transp. Syst. Technol. Plan. Oper. 2013, 17, 123–141. [Google Scholar] [CrossRef]
- Oskarbski, J.; Zawisza, M.; Żarski, K. Automatic incident detection at intersections with use of telematics. Transp. Res. Procedia 2016, 14, 3466–3475. [Google Scholar] [CrossRef] [Green Version]
- Chaturvedi, M.; Srivastava, S. Multi-modal design of an intelligent transportation system. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2017–2027. [Google Scholar] [CrossRef]
- Axer, S.; Friedrich, B. Level of service estimation based on low-frequency floating car data. Transp. Res. Procedia 2014, 3, 1051–1058. [Google Scholar] [CrossRef] [Green Version]
- Pedzierska, M.; Kamiński, T. The use of simulator studies to assess the impact of ITS services on road users behaviour. MATEC Web Conf. 2018, 231, 1–8. [Google Scholar] [CrossRef]
- El Faouzi, N.E.; Klein, L.A. Data fusion for ITS: Techniques and research needs. Transp. Res. Procedia 2016, 15, 495–512. [Google Scholar] [CrossRef] [Green Version]
- Castanedo, F. A review of data fusion techniques. Sci. World J. 2013, 2013, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Luo, R.C.; Yih, C.-C.; Su, K.L. Multisensor fusion and integration: Approaches, applications, and future research directions. IEEE Sens. J. 2002, 2, 107–119. [Google Scholar] [CrossRef]
- Ang, L.-M.; Seng, K.P. Big sensor data applications in urban environments. Big Data Res. 2016, 4, 1–12. [Google Scholar] [CrossRef]
- Kyriakou, C.; Christodoulou, S.E.; Dimitriou, L. Roadway pavement anomaly classification utilizing smartphones and artificial intelligence. In Proceedings of the 2016 18th Mediterranean Electrotechnical Conference (MELECON), Lemesos, Cyprus, 18–20 April 2016. [Google Scholar] [CrossRef]
- Oskarbski, J. Perspectives of Telematics Implementation in Tri-City Transport Systems Management and planning; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- PTV Group. VISUM Fundamentals; PTV Group: Karlsruhe, Germany, 2012. [Google Scholar]
- ATKINS. SATURN User Manual, 11.3th ed.; ATKINS: Epsom, UK, 2015. [Google Scholar]
- PTV Group. PTV VISSIM 10 Manual; PTV Group: Karlsruhe, Germany, 2017. [Google Scholar]
- Transportation Research Board. HCM2010 Highway Capacity Manual, 5th ed.; Transportation Research Board: Washington, DC, USA, 2010; Volume 2. [Google Scholar]
- Knoop, V.; Hoogendoorn, S.; Adams, K. Capacity reductions at incidents sites on Motorways. Eur. J. Transp. Infrastruct. Res. 2009, 9, 363–379. [Google Scholar] [CrossRef]
- Abdel-Aty, M.; Wang, L. Reducing real-time crash risk for congested expressway weaving segments using ramp metering. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017. [Google Scholar] [CrossRef]
- Hayward, J.C. Near-miss determination through use of a scale of danger. Highw. Res. Rec. 1972, 384, 22–34. [Google Scholar]
- Allaby, P.; Hellinga, B.; Bullock, M. Variable speed limits: Safety and operational impacts of a candidate control strategy for freeway applications. IEEE Trans. Intell. Transp. Syst. 2007, 8, 671–680. [Google Scholar] [CrossRef]
- Sadat, M.; Celikoglu, H.B. Simulation-based variable speed limit systems modelling: An overview and a case study on istanbul freeways. Transp. Res. Procedia 2017, 22, 607–614. [Google Scholar] [CrossRef]
- Grumert, E.; Ma, X.; Tapani, A. Analysis of a cooperative variable speed limit system using microscopic traffic simulation. Transp. Res. Part C Emerg. Technol. 2015, 52, 173–186. [Google Scholar] [CrossRef]
- Cao, J.; Hu, D.; Luo, Y.; Qiu, T.Z.; Ma, Z. Exploring the impact of a coordinated variable speed limit control on congestion distribution in freeway. J. Traffic Transp. Eng. 2015, 2, 167–178. [Google Scholar] [CrossRef] [Green Version]
- Khondaker, B.; Kattan, L. Variable speed limit: A microscopic analysis in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 58, 146–159. [Google Scholar] [CrossRef] [Green Version]
- Yu, R.; Abdel-Aty, M. An optimal variable speed limits system to ameliorate traffic safety risk. Transp. Res. Part C Emerg. Technol. 2014, 46, 235–246. [Google Scholar] [CrossRef]
- Hadiuzzaman, M.; Fang, J.; Karim, M.A.; Luo, Y.; Qiu, T.Z. Modeling driver compliance to vsl and quantifying impacts of compliance levels and control strategy on mobility and safety. J. Transp. Eng. 2015, 141, 12. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cohort | Traffic Volumes in the Cohort q (veh/h /lane) | Volume-to-Capacity Ratio q/C | The Intensity of Traffic Assumed for the Load of the Major Road Lane in Test Models | Representative Volume-to-Capacity Ratio q/C |
|---|---|---|---|---|
| 0 | q > 2100 | 0.95–1 | 2150 | 0.98 |
| 1 | 1300–2099 | 0.59–0.95 | 1700 | 0.77 |
| 2 | 720–1299 | 0.33–0.59 | 1010 | 0.46 |
| 3 | 0–719 | 0–0.33 | 360 | 0.16 |
| No. | Scenario | Average Value of the Position Deviation (m) | Standard Deviation of Lateral Position (SDLP) (m) |
|---|---|---|---|
| 1. | Static limit (S0/G5) | −0.063 | 0.307 |
| 2. | Speed limit on the Variable Message Sign (VMS) (S1/G2) | −0.134 | 0.332 |
| 3. | Speed limit on VMS with the reason for limitation (S2/G5) | −0.090 | 0.318 |
| Part of Road Network | Type of Conflict | Measure | Scenario | Difference | |||
|---|---|---|---|---|---|---|---|
| W0 | W1 | W2 | W1/W0 | W2/W0 | |||
| Main road sections without merging and weaving sections | crossing | Number of conflicts | 0 | 0 | 0 | 0% | 0% |
| lane change | Number of conflicts | 1183 | 886 | 489 | −25% | −59% | |
| MaxDeltaV > 20 km/h | 760 | 562 | 271 | −26% | −64% | ||
| rear end | Number of conflicts | 4899 | 4228 | 2969 | −12% | −39% | |
| MaxDeltaV > 20 km/h | 210 | 184 | 100 | −12% | −52% | ||
| Interchanges along major roads | crossing | Number of conflicts | 226 | 254 | 205 | 12% | −9% |
| MaxDeltaV > 20 km/h | 223 | 252 | 200 | 13% | −10% | ||
| lane change | Number of conflicts | 699 | 675 | 657 | −3% | −6% | |
| MaxDeltaV > 20 km/h | 230 | 194 | 234 | −16% | 2% | ||
| rear end | Number of conflicts | 3604 | 3724 | 3500 | 3% | −3% | |
| MaxDeltaV > 20 km/h | 192 | 188 | 191 | −2% | −1% | ||
| Other parts of the road network | crossing | Number of conflicts | 11 | 14 | 16 | 27% | 45% |
| MaxDeltaV > 20 km/h | 1 | 2 | 9 | 100% | 800% | ||
| lane change | Number of conflicts | 3 | 12 | 15 | 300% | 400% | |
| MaxDeltaV > 20 km/h | 0 | 1 | 0 | 100% | 0% | ||
| rear end | Number of conflicts | 919 | 889 | 934 | −3% | 2% | |
| MaxDeltaV > 20 km/h | 0 | 0 | 1 | 0% | 100% | ||
| Number of conflicts | 11,544 | 10,742 | 8785 | −7% | −24% | ||
| MaxDeltaV > 20 km/h | 1616 | 1383 | 1006 | −14% | −38% | ||
| Measure | W0 | W1 | W2 | W1/W0 | W2/W0 |
|---|---|---|---|---|---|
| Average delays (s/veh) | 85.35 | 82.98 | 73.46 | −2.8% | −13.9% |
| Average number of stops (stops/veh) | 0.42 | 0.43 | 0.40 | 3.0% | −4.8% |
| Mean speed (km/h) | 64.52 | 64.30 | 63.60 | −0.3% | −1.4% |
| Total delays in the entire network (h) | 38,140 | 37,180 | 33,010 | −2.5% | −13.5% |
| Total number of stops | 65,888 | 68,313 | 63,279 | 3.7% | −4.0% |
| Scenario | Traffic Volume (veh/h/lane) | Average Delays (s/veh) | Average Number of Stops | Average Speed (km/h) | Total Delay (h) | Total Number of Stops | |
|---|---|---|---|---|---|---|---|
| W0 | Without incident | 1010 | 58.51 | 0.31 | 74.83 | 1563 | 28,988 |
| W2 | 55.31 | 0.31 | 73.17 | 1498 | 28,984 | ||
| W0 | 1700 | 85.35 | 0.42 | 64.52 | 3814 | 65,888 | |
| W2 | 73.46 | 0.40 | 63.60 | 3301 | 63,279 | ||
| W0 | With incident | 1010 | 67.84 | 0.42 | 70.86 | 1904 | 40,899 |
| W2 | 64.66 | 0.39 | 69.52 | 1838 | 38,512 | ||
| W0 | 1700 | 91.90 | 0.68 | 62.07 | 4360 | 117,601 | |
| W2 | 85.89 | 0.67 | 60.04 | 4168 | 117,738 | ||
| Scenario | Traffic Volume (veh/h/lane) | Number of Conflicts | MaxDeltaV >20 km/h | Number of Conflicts | MaxDeltaV >20 km/h | |
|---|---|---|---|---|---|---|
| Entire Test Network | Major Road | |||||
| W0 | Without incident | 1010 | 2079 | 446 | 984 | 303 |
| W2 | 1940 | 374 | 816 | 233 | ||
| W0 | 1700 | 11,544 | 1616 | 6082 | 970 | |
| W2 | 8785 | 1006 | 3458 | 371 | ||
| W0 | With incident | 1010 | 3208 | 507 | 2012 | 361 |
| W2 | 2978 | 428 | 1791 | 277 | ||
| W0 | 1700 | 13,520 | 1511 | 8889 | 876 | |
| W2 | 13,007 | 1082 | 8252 | 447 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oskarbski, J.; Kamiński, T.; Kyamakya, K.; Chedjou, J.C.; Żarski, K.; Pędzierska, M. Assessment of the Speed Management Impact on Road Traffic Safety on the Sections of Motorways and Expressways Using Simulation Methods. Sensors 2020, 20, 5057. https://doi.org/10.3390/s20185057
Oskarbski J, Kamiński T, Kyamakya K, Chedjou JC, Żarski K, Pędzierska M. Assessment of the Speed Management Impact on Road Traffic Safety on the Sections of Motorways and Expressways Using Simulation Methods. Sensors. 2020; 20(18):5057. https://doi.org/10.3390/s20185057
Chicago/Turabian StyleOskarbski, Jacek, Tomasz Kamiński, Kyandoghere Kyamakya, Jean Chamberlain Chedjou, Karol Żarski, and Małgorzata Pędzierska. 2020. "Assessment of the Speed Management Impact on Road Traffic Safety on the Sections of Motorways and Expressways Using Simulation Methods" Sensors 20, no. 18: 5057. https://doi.org/10.3390/s20185057
APA StyleOskarbski, J., Kamiński, T., Kyamakya, K., Chedjou, J. C., Żarski, K., & Pędzierska, M. (2020). Assessment of the Speed Management Impact on Road Traffic Safety on the Sections of Motorways and Expressways Using Simulation Methods. Sensors, 20(18), 5057. https://doi.org/10.3390/s20185057