The Millimeter-Wave Radar SLAM Assisted by the RCS Feature of the Target and IMU

Abstract
:1. Introduction
2. Radar Data Preprocessing
2.1. Filter Low-Precision Points and Construct “Multi-Scan”
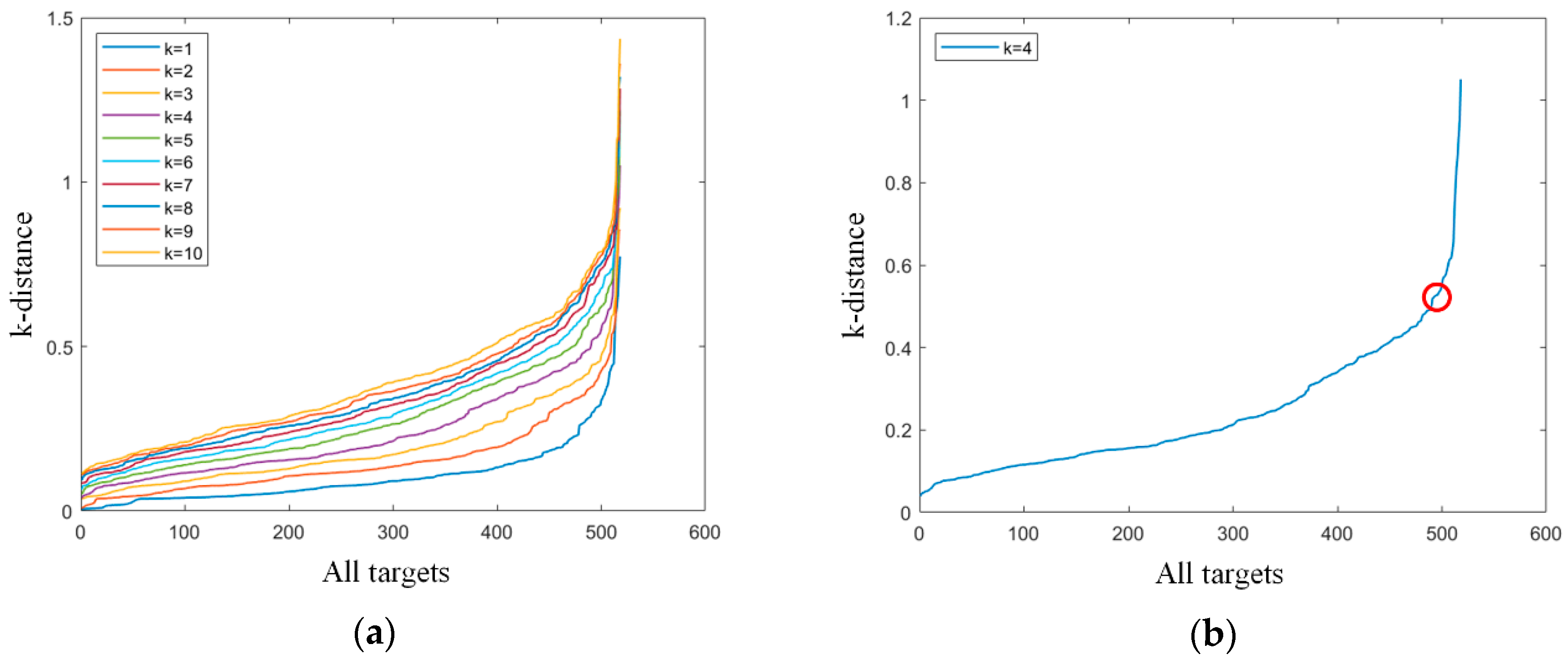
2.2. Outlier Removal by DBSCAN Based on RCS Feature
3. Tight Coupling of Localization and Mapping
3.1. Original CSM Method
3.2. Improved CSM Method
- (1)
- The improved CSM method no longer matched Q with F. Instead, it matched Q with local submap in global grid map, which is a “scan to map” method.
- (2)
- When constructing the rasterized lookup table, we no longer assigned the same occupation probability to each point in F but assigned a different probability value to each point in F according to the RCS of the target.
4. Results and Discussion
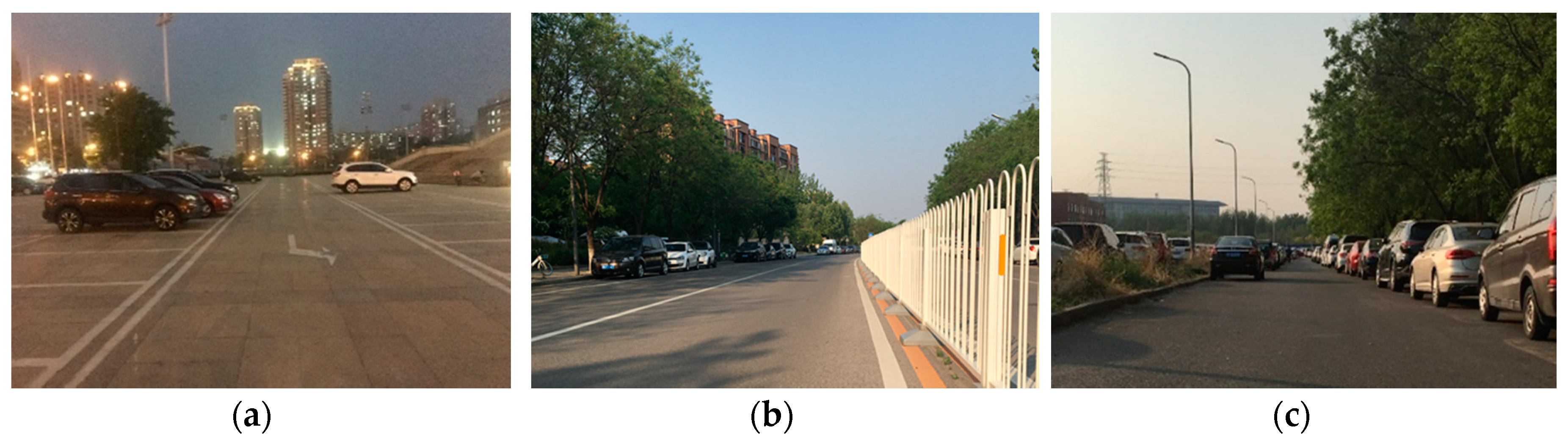
4.1. Experimental Platform and Scene
4.2. Data Preprocessing Results
4.3. Trajectory and Map
4.4. Data Volume
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, X.Z.; Liu, R.J.; Zhang, S.; Zeng, H.; Yang, X.P.; Deng, H. Development of millimeter wave radar imaging and SLAM in underground coal mine environment. J. China Coal Soc. 2020, 45, 2182–2192. [Google Scholar]
- Skolnik, M. Radar Handbook, 3rd ed.; McGraw Hill Education: New York, NY, USA, 2008. [Google Scholar]
- Kanungo, T.; Mount, D.M.; Netanyahu, N.S.; Piatko, C.D.; Silverman, R.; Wu, A.Y. An efficient k-means clustering algorithm: Analysis and implementation. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 881–892. [Google Scholar] [CrossRef]
- Zhang, T.; Ramakrishnan, R.; Livny, M. BIRCH: A New Data Clustering Algorithm and Its Applications. J. Data Min. Knowl. Discov. 1997, 1, 141–182. [Google Scholar] [CrossRef]
- Fraley, C.; Raftery, A.E. Model-Based Clustering, Discriminant Analysis, and Density Estimation. J. Am. Stat. Assoc. 2002, 97, 611–631. [Google Scholar] [CrossRef]
- Khan, K.; Rehman, S.U.; Aziz, K.; Fong, S.; Sarasvady, S. DBSCAN: Past, present and future. In Proceedings of the Fifth International Conference on the Applications of Digital Information and Web Technologies (ICADIWT 2014), Bangalore, India, 17–19 February 2014. [Google Scholar]
- Lim, S.; Lee, S.; Kim, S. Clustering of Detected Targets Using DBSCAN in Automotive Radar Systems. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 30 August 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Xu, F.L.; Wang, H.; Hu, B.W.; Ren, M.W. Road Boundaries Detection based on Modified Occupancy Grid Map Using Millimeter-wave Radar. Mob. Netw. Appl. 2019, 1–8. [Google Scholar] [CrossRef]
- Stolz, M.; Li, M.; Feng, Z.; Kunert, M.; Menzel, W. High resolution automotive radar data clustering with novel cluster method. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 164–168. [Google Scholar] [CrossRef]
- Li, W.J.; Yan, S.Q.; Jiang, Y.; Zhang, S.Z.; Wang, C.L. Research on an algorithm for adaptively determining the parameters of the DBSCAN algorithm. Comput. Eng. Appl. 2019, 55, 1–7. [Google Scholar]
- Fu, Z.Q.; Wang, X.F. DBSCAN algorithm based on variable parameters. In Proceedings of the Network Security Technology and Application, Beijing, China, 15 August 2018; Volume 8, pp. 34–36. [Google Scholar]
- Wang, G.; Lin, G.Y. Improved adaptive parameter DBSCAN clustering algorithm. In Proceedings of the Computer Engineering and Applications, Beijing, China, 31 December 2019; pp. 1–8. [Google Scholar]
- Zhou, H.F.; Wang, P. Research on the method of adaptive parameter determination in the DBSCAN algorithm. J. Xi’an Univ. Technol. 2012, 28, 289–292. [Google Scholar] [CrossRef]
- Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X.W. Density-Based Clustering in Spatial Databases: The Algorithm GDBSCAN and Its Applications. Data Min. Knowl. Discov. 1998, 2, 169–194. [Google Scholar] [CrossRef]
- Clark, S.; Durrant-Whyte, H. Autonomous land vehicle navigation using millimeter wave radar. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), Leuven, Belgium, 20 May 1998; Volume 4, pp. 3697–3702. [Google Scholar] [CrossRef]
- Dissanayake, M.W.M.G.; Newman, P.; Clark, S.; Durrant-Whyte, H.F.; Csorba, M. A Solution to the Simultaneous Localization and Map Building (SLAM) Problem; IEEE-INST Electrical Electronics Engineers Inc.: Piscataway, NJ, USA, 2001. [Google Scholar] [CrossRef] [Green Version]
- Checchin, P.; Gerossier, F.; Blanc, C.; Chapuis, R.; Trassoudaine, L. Radar Scan Matching SLAM Using the Fourier-Mellin Transform. In Proceedings of the 7th International Conference on Field and Service Robotics, Edinburgh, UK, 26–29 July 2010; Volume 62, pp. 151–161. [Google Scholar]
- Săftescu, Ş.; Gadd, M.; De Martini, D.; Barnes, D.; Newman, P. Kidnapped Radar: Topological Radar Localisation using Rotationally-Invariant Metric Learning. arXiv 2020, arXiv:2001.09438. [Google Scholar]
- Gadd, M.; De Martini, D.; Newman, P. Look around You: Sequence-based Radar Place Recognition with Learned Rotational Invariance. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 270–276. [Google Scholar] [CrossRef]
- Aldera, R.; De Martini, D.; Gadd, M.; Newman, P. What Could Go Wrong? Introspective Radar Odometry in Challenging Environments. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 2835–2842. [Google Scholar] [CrossRef]
- Aldera, R.; De Martini, D.; Gadd, M.; Newman, P. Fast Radar Motion Estimation with a Learnt Focus of Attention using Weak Supervision. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1190–1196. [Google Scholar] [CrossRef]
- Barnes, D.; Posner, I. Under the Radar: Learning to Predict Robust Keypoints for Odometry Estimation and Metric Localisation in Radar. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9484–9490. [Google Scholar] [CrossRef]
- Barnes, D.; Weston, R.; Posner, I. Masking by moving: Learning distraction-free radar odometry from pose information. In Proceedings of the Conference on Robot Learning (CoRL), Osaka, Japan, 30 October–1 November 2019. [Google Scholar]
- Hong, Z.; Petillot, Y.; Wang, S. RadarSLAM: Radar based Large-Scale SLAM in All Weathers. arXiv 2020, arXiv:2005.02198. [Google Scholar]
- Almalioglu, Y.; Turan, M.; Lu, C.X.; Trigoni, N.; Markham, A. Milli-RIO: Ego-Motion Estimation with Low-Cost Millimetre-Wave Radar. arXiv 2019, arXiv:1909.05774. [Google Scholar]
- Ge, Y.; Wen, F.X.; Kim, H.; Zhu, M.F.; Jiang, F.; Kim, S.; Svensson, L.; Wymeersch, H. 5G SLAM Using the Clustering and Assignment Approach with Diffuse Multipath. Sensors 2020, 20, 4656. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Granstrom, K.; Kim, S.; Wymeersch, H. Low-Complexity 5g Slam with CKF-PHD Filter. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar]
- Guidi, F.; Guerra, A.; Dardari, D. Personal Mobile Radars with Millimeter-Wave Massive Arrays for Indoor Mapping. IEEE Trans. Mob. Comput. 2016, 15, 1471–1484. [Google Scholar] [CrossRef]
- Guerra, A.; Guidi, F.; Dall’Ara, J.; Dardari, D. Occupancy Grid Mapping for Personal Radar Applications. In Proceedings of the 2018 IEEE Statistical Signal Processing Workshop (SSP), Freiburg, Germany, 10–13 June 2018. [Google Scholar]
- Guerra, A.; Guidi, F.; Dardari, D.; Clemente, A.; D’Errico, R. A Millimeter-Wave Indoor Backscattering Channel Model for Environment Mapping. IEEE Trans. Antennas Propag. 2017, 65, 4935–4940. [Google Scholar] [CrossRef]
- Mendes, E.; Koch, P.; Lacroix, S. ICP-based pose-graph SLAM. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 195–200. [Google Scholar] [CrossRef] [Green Version]
- Deschaud, J. IMLS-SLAM: Scan-to-Model Matching Based on 3D Data. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2480–2485. [Google Scholar] [CrossRef] [Green Version]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar] [CrossRef]
- Cen, S.H.; Newman, P. Precise Ego-Motion Estimation with Millimeter-Wave Radar under Diverse and Challenging Conditions. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6045–6052. [Google Scholar] [CrossRef]
- Ward, E.; Folkesson, J. Vehicle localization with low cost radar sensors. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 864–870. [Google Scholar] [CrossRef] [Green Version]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar] [CrossRef] [Green Version]
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 19–25. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Li, H.; Jia, Y. Go-ICP: Solving 3D Registration Efficiently and Globally Optimally. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013. [Google Scholar]
- Olson, E.B. Real-time correlative scan matching. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4387–4393. [Google Scholar] [CrossRef] [Green Version]
- Kohlbrecher, S.; von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable SLAM system with full 3D motion estimation. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar] [CrossRef] [Green Version]
- Biber, P.; Strasser, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2743–2748. [Google Scholar] [CrossRef]
- Olson, E. M3RSM: Many-to-many multi-resolution scan matching. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5815–5821. [Google Scholar] [CrossRef]
- Chong, Z.J.; Qin, B.; Bandyopadhyay, T.; Ang, M.H.; Frazzoli, E.; Rus, D. Mapping with synthetic 2D LIDAR in 3D urban environment. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4715–4720. [Google Scholar] [CrossRef]
- Dickmann, J.; Klappstein, J.; Hahn, M.; Appenrodt, N.; Bloecher, H.; Werber, K.; Sailer, A. Automotive radar the key technology for autonomous driving: From detection and ranging to environmental understanding. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 782–787. [Google Scholar] [CrossRef]
- Li, Z.; Song, S.R.; Hong, T.S.; Wang, W.X.; Wang, Q. Mahalanobis distance algorithm to separate objective picture based on color characteristic and color clustering. In Proceedings of the Computer Engineering and Design, Beijing, China, 28 April 2006; Volume 8, pp. 1352–1353. [Google Scholar] [CrossRef]
- Werber, K.; Rapp, M.; Klappstein, J.; Hahn, M.; Dickmann, J.; Dietmayer, K.; Waldschmidt, C. Automotive radar gridmap representations. In Proceedings of the 2015 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Heidelberg, Germany, 27–29 April 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Park, Y.S.; Jeong, J.; Shin, Y.; Kim, A. Radar Dataset for Robust Localization and Mapping in Urban Environment. In Proceedings of the ICRA Workshop on Dataset Generation and Benchmarking of SLAM Algorithms for Robotics and VR/AR, Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Barnes, D.; Gadd, M.; Murcutt, P.; Posner, I. The Oxford Radar RobotCar Dataset: A Radar Extension to the Oxford RobotCar Dataset. arXiv 2019, arXiv:1909.01300. [Google Scholar]
- Abadpour, S.; Diewald, A.; Pauli, M.; Zwick, T. Extraction of Scattering Centers Using a 77 GHz FMCW Radar. In Proceedings of the 2019 12th German Microwave Conference (GeMiC), Stuttgart, Germany, 25–27 March 2019; pp. 79–82. [Google Scholar] [CrossRef]
- Chipengo, U.; Commens, M. A 77 GHz Simulation Study of Roadway Infrastructure Radar Signatures for Smart Roads. In Proceedings of the 2019 16th European Radar Conference (EuRAD), Paris, France, 2–4 October 2019; pp. 137–140. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Detection Parameters | Parameter Range |
|---|---|
| Distance range | 0.20...150 m@0…±9° far range, 0.20...70 m@0…±45° near range, 0.20…20 m@±60° near range |
| Precision distance measuring | ±0.40 m far range, ±0.10 m (±0.05 m@standstill) near range |
| Precision azimuth angle | ±0.1° far range, ±0.3°@0°/±1°@±45°/±5°@±60°near range |
| Scenes | Raw Radar Points (RPP) | Low-Precision Points (LPP) | Percentage (LPP/RPP) | Outliers (O) | Percentage (O/(RPP − LPP)) | Sum (LPP + O) | Percentage (Sum/RPP) |
|---|---|---|---|---|---|---|---|
| Scene 1 | 135,318 | 75,001 | 55.43% | 14,182 | 23.51% | 89,183 | 65.91% |
| Scene 2 | 397,999 | 111,165 | 27.93% | 80,669 | 28.12% | 191,834 | 48.20% |
| Scene 3 | 480,844 | 63,370 | 13.17% | 98,033 | 23.48% | 161,403 | 33.57% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Liu, Y.; Wang, Y.; Lin, Y.; Shen, W. The Millimeter-Wave Radar SLAM Assisted by the RCS Feature of the Target and IMU. Sensors 2020, 20, 5421. https://doi.org/10.3390/s20185421
Li Y, Liu Y, Wang Y, Lin Y, Shen W. The Millimeter-Wave Radar SLAM Assisted by the RCS Feature of the Target and IMU. Sensors. 2020; 20(18):5421. https://doi.org/10.3390/s20185421
Chicago/Turabian StyleLi, Yang, Yutong Liu, Yanping Wang, Yun Lin, and Wenjie Shen. 2020. "The Millimeter-Wave Radar SLAM Assisted by the RCS Feature of the Target and IMU" Sensors 20, no. 18: 5421. https://doi.org/10.3390/s20185421
APA StyleLi, Y., Liu, Y., Wang, Y., Lin, Y., & Shen, W. (2020). The Millimeter-Wave Radar SLAM Assisted by the RCS Feature of the Target and IMU. Sensors, 20(18), 5421. https://doi.org/10.3390/s20185421