Unmanned Aerial System Integrated Sensor for Remote Gamma and Neutron Monitoring

Abstract
:1. Introduction
2. Materials and Methods
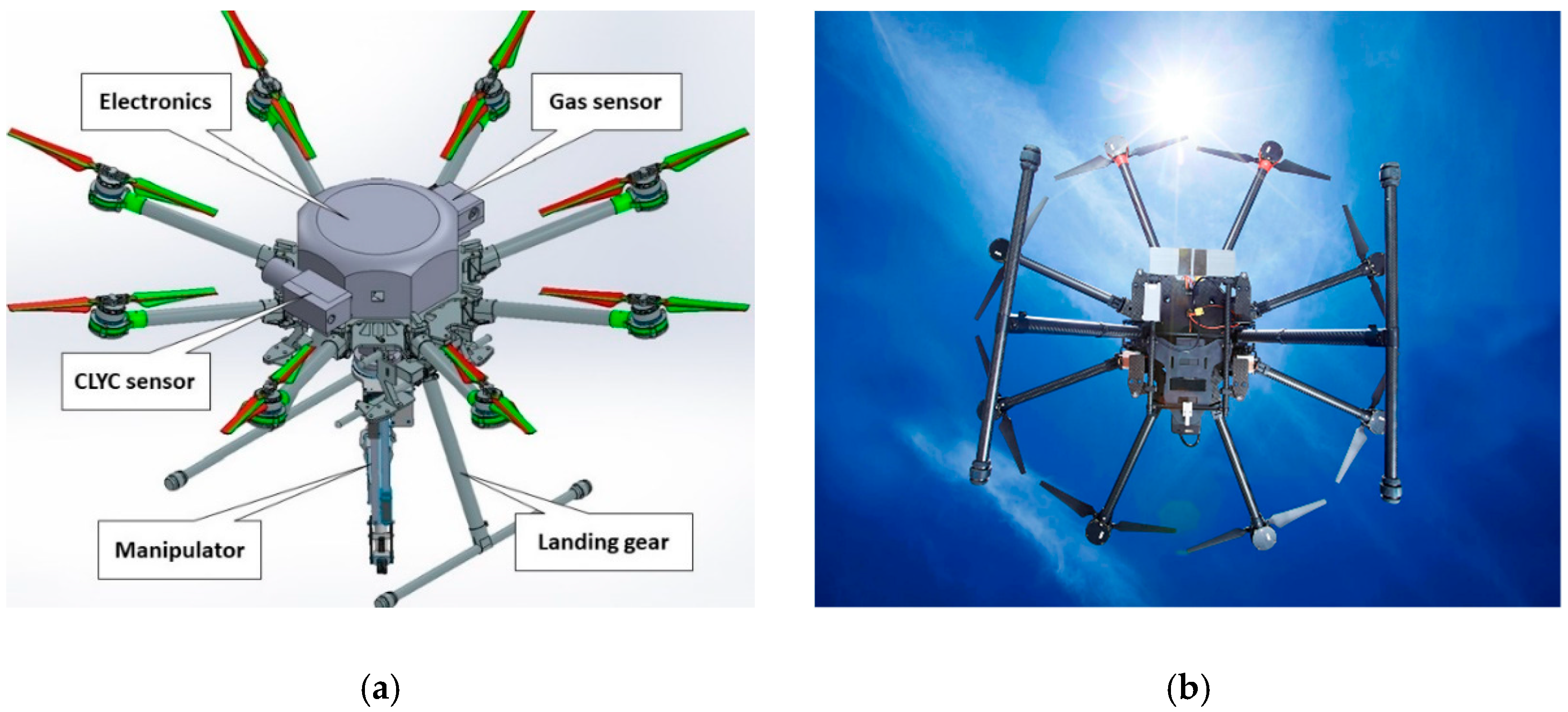
2.1. Mobile Unmanned Aerial System
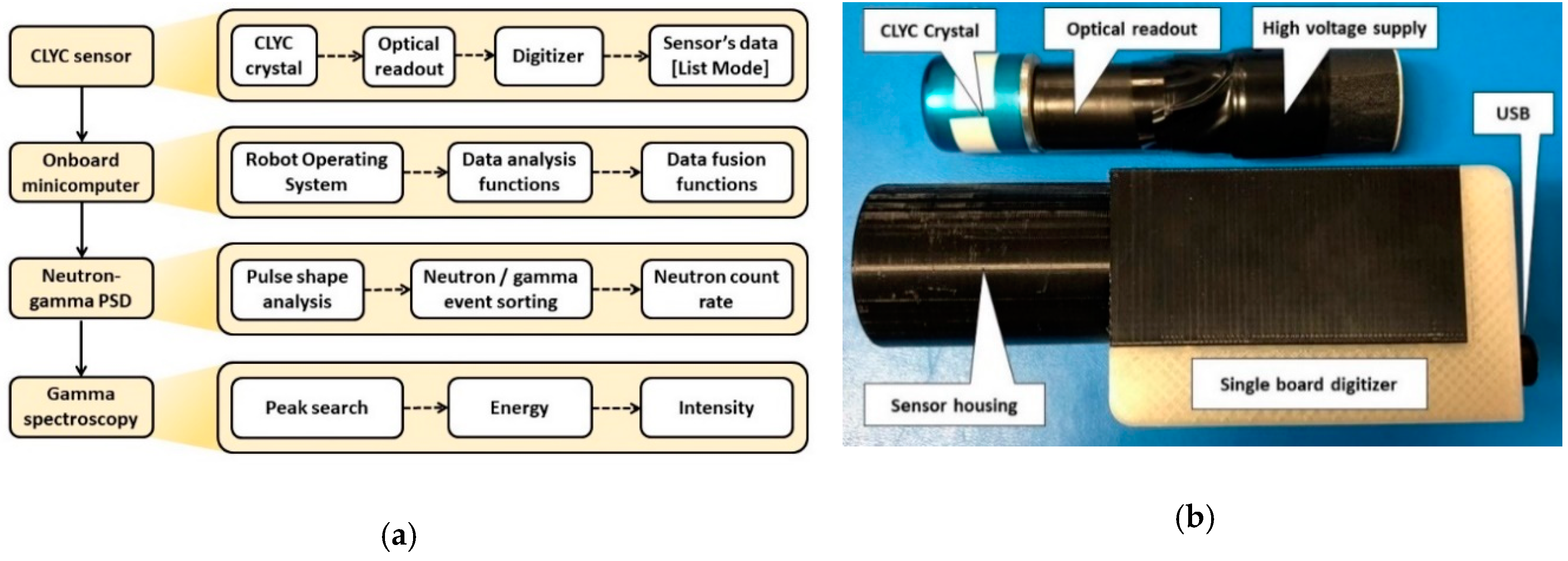
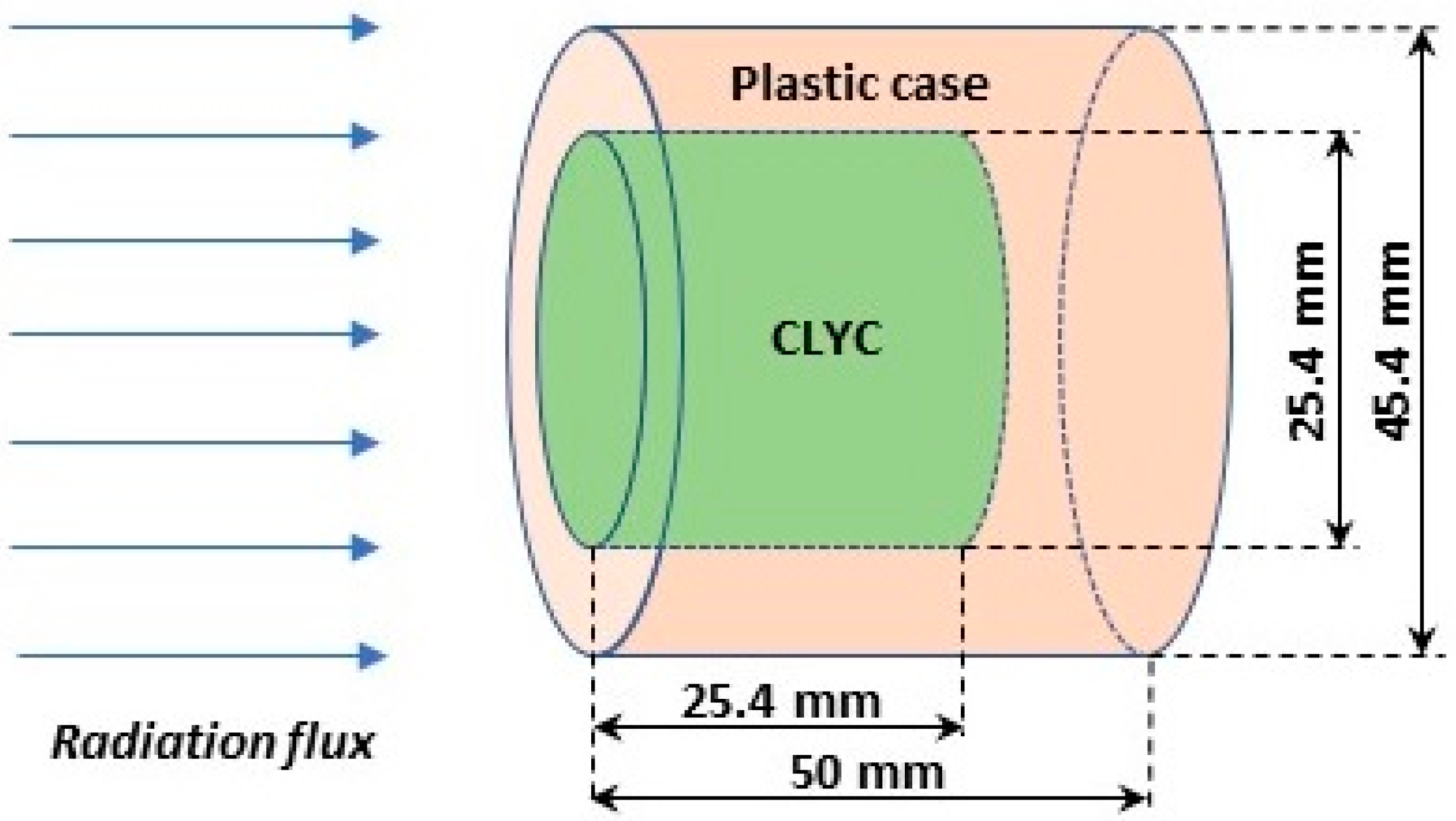
2.2. Ambient Temperature Gamma/Neutron Sensor
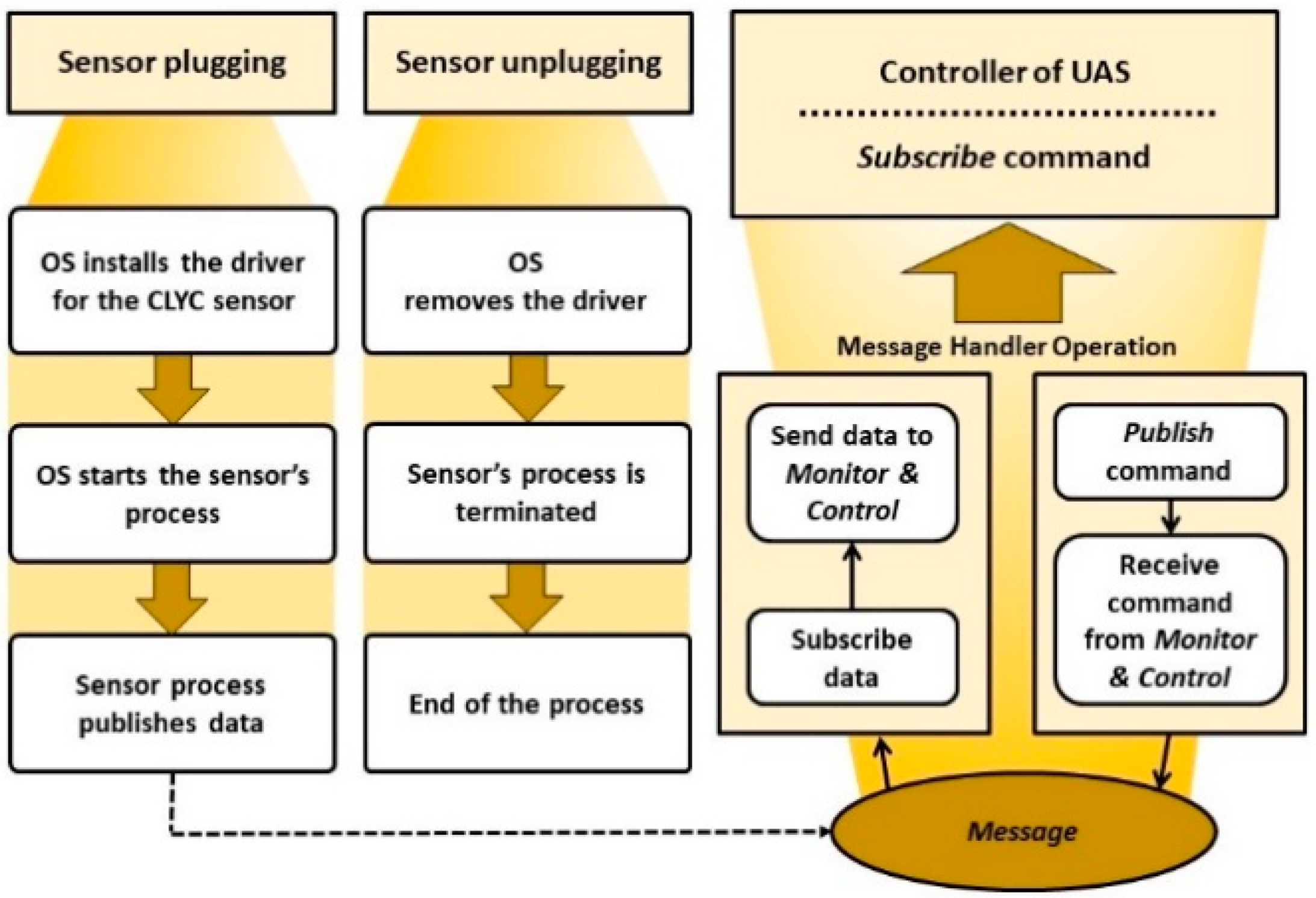
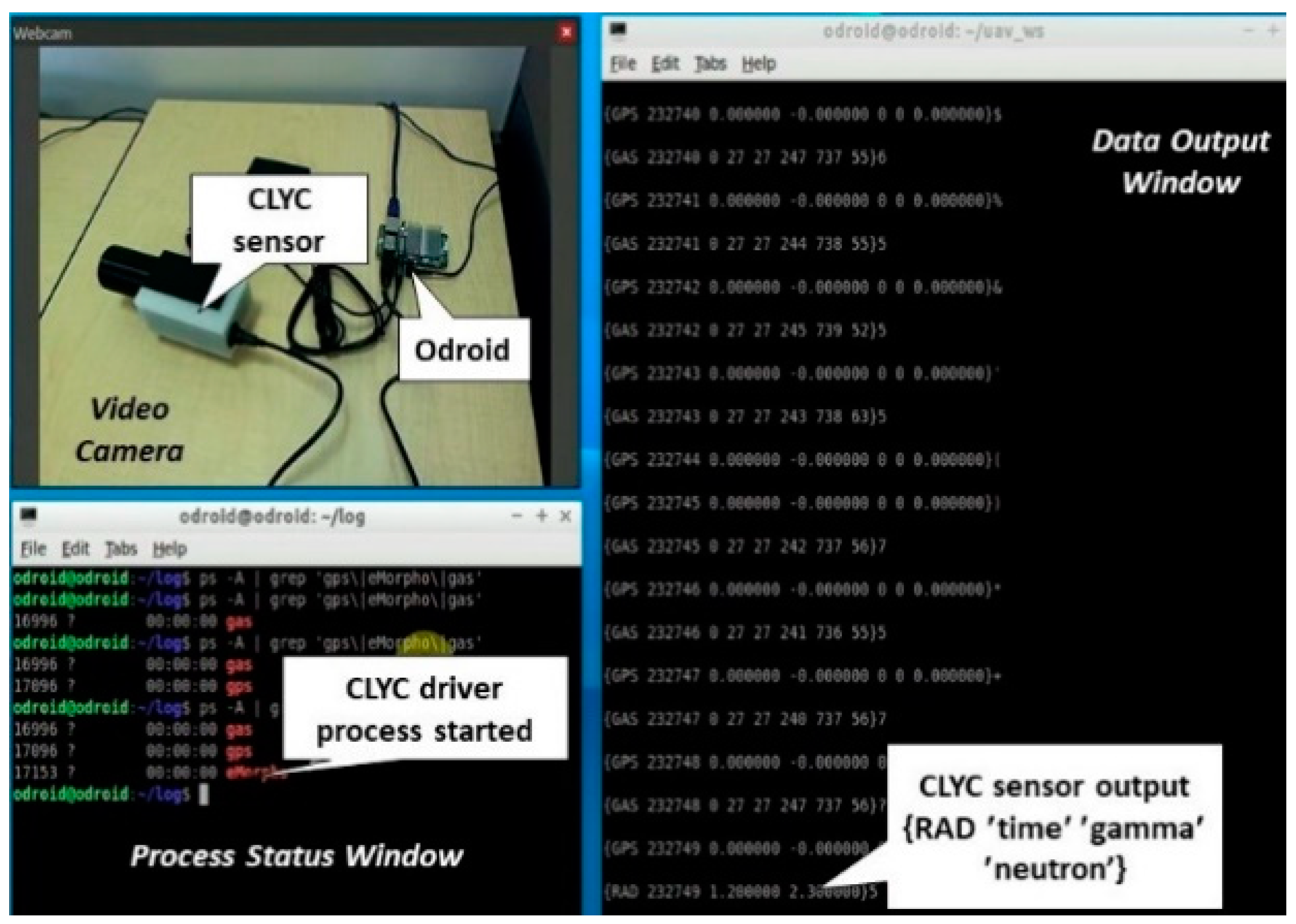
2.3. Sensor Integration with the UAS
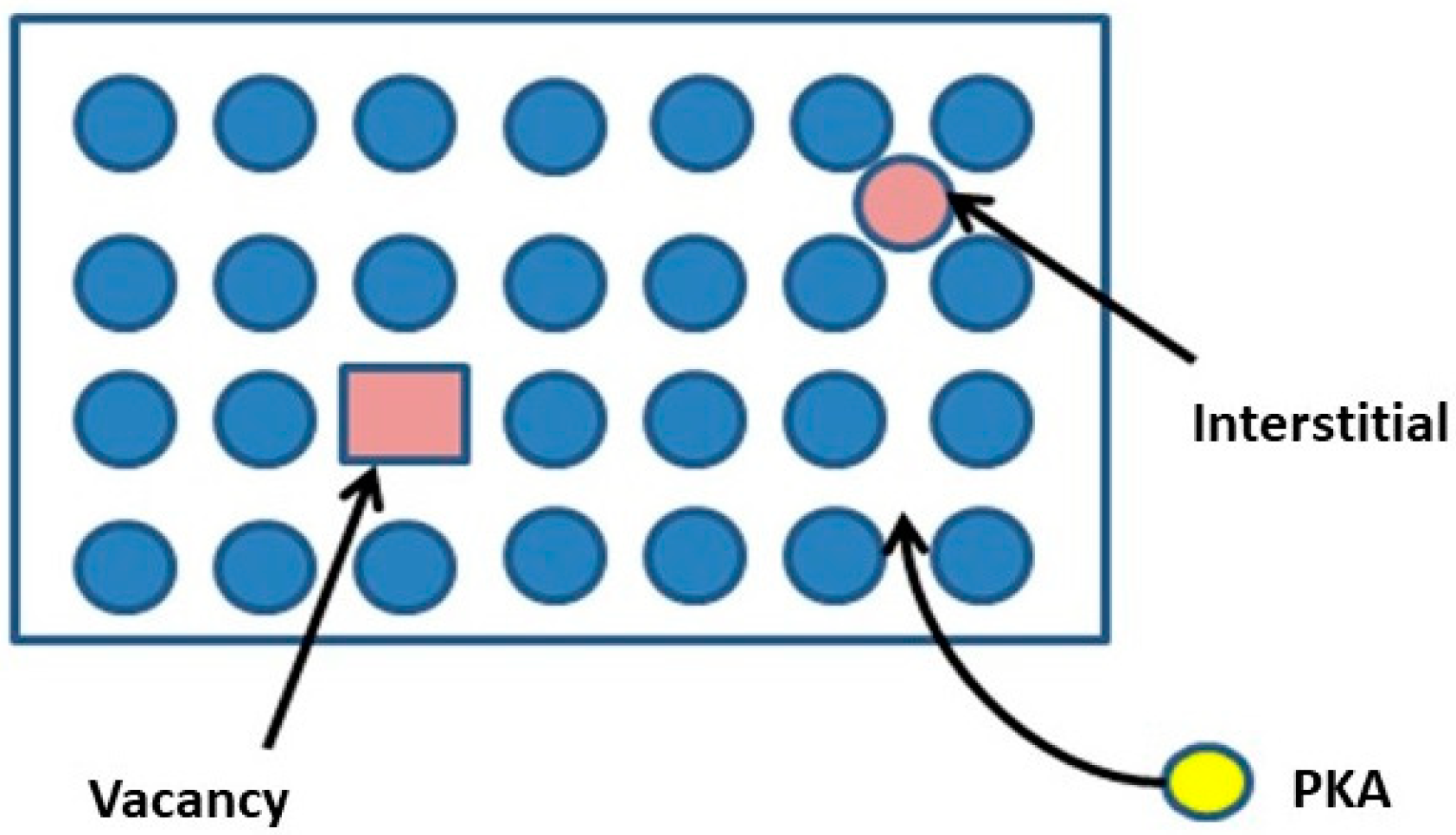
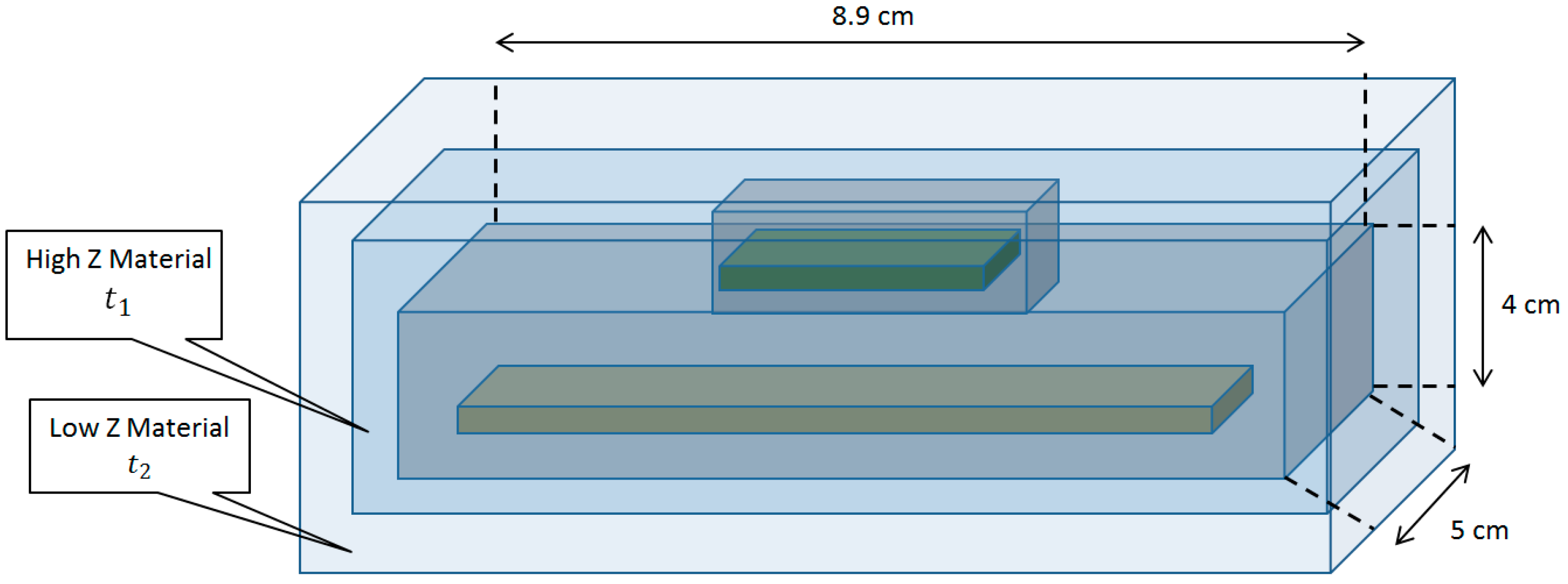
2.4. Radiation Damage Modeling
3. Results and Discussion
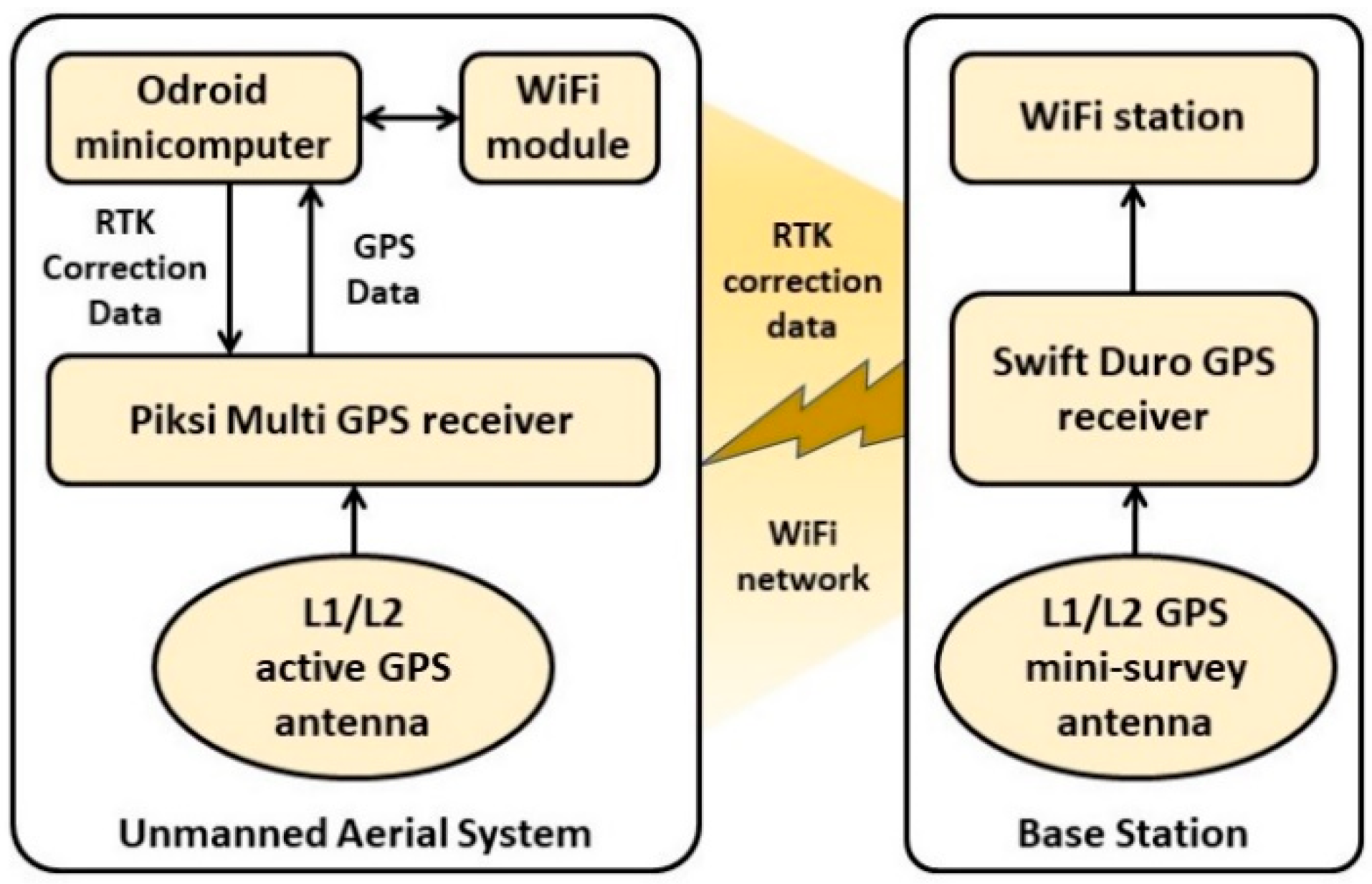
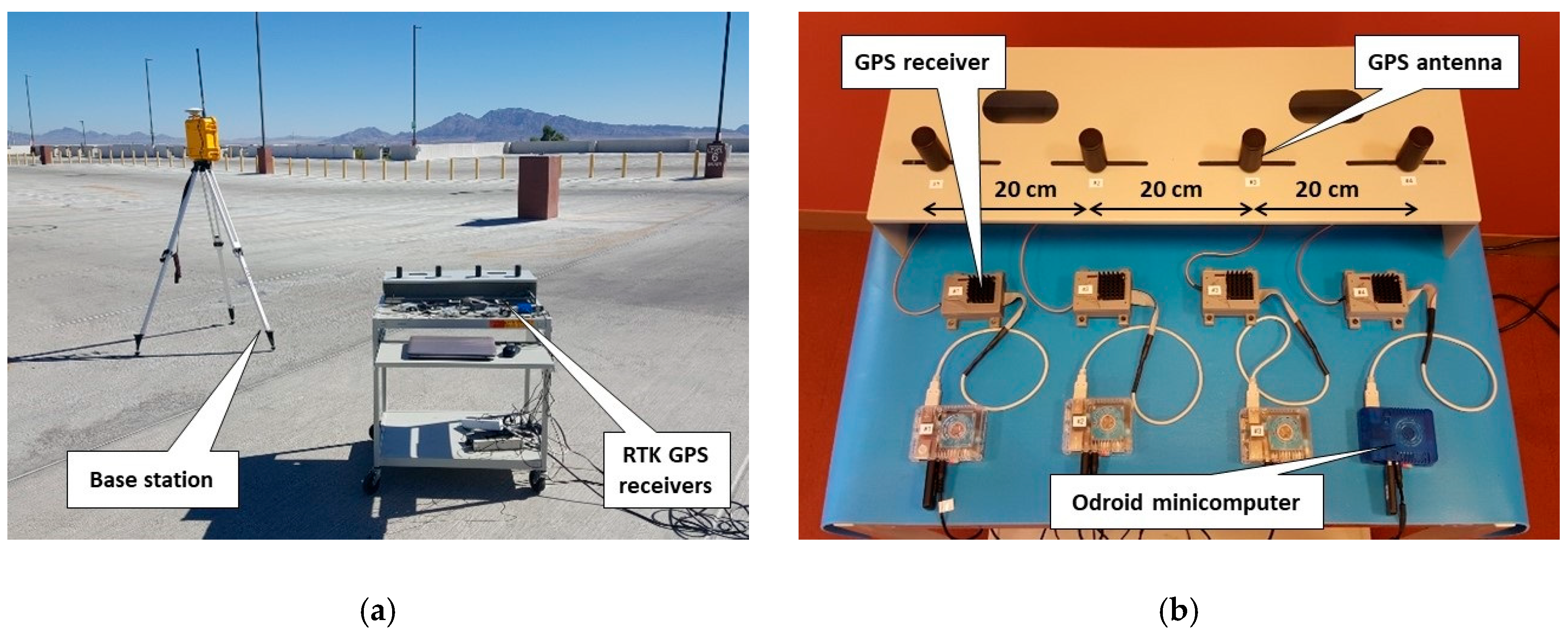
3.1. UAS Positioning Accuracy Measurement
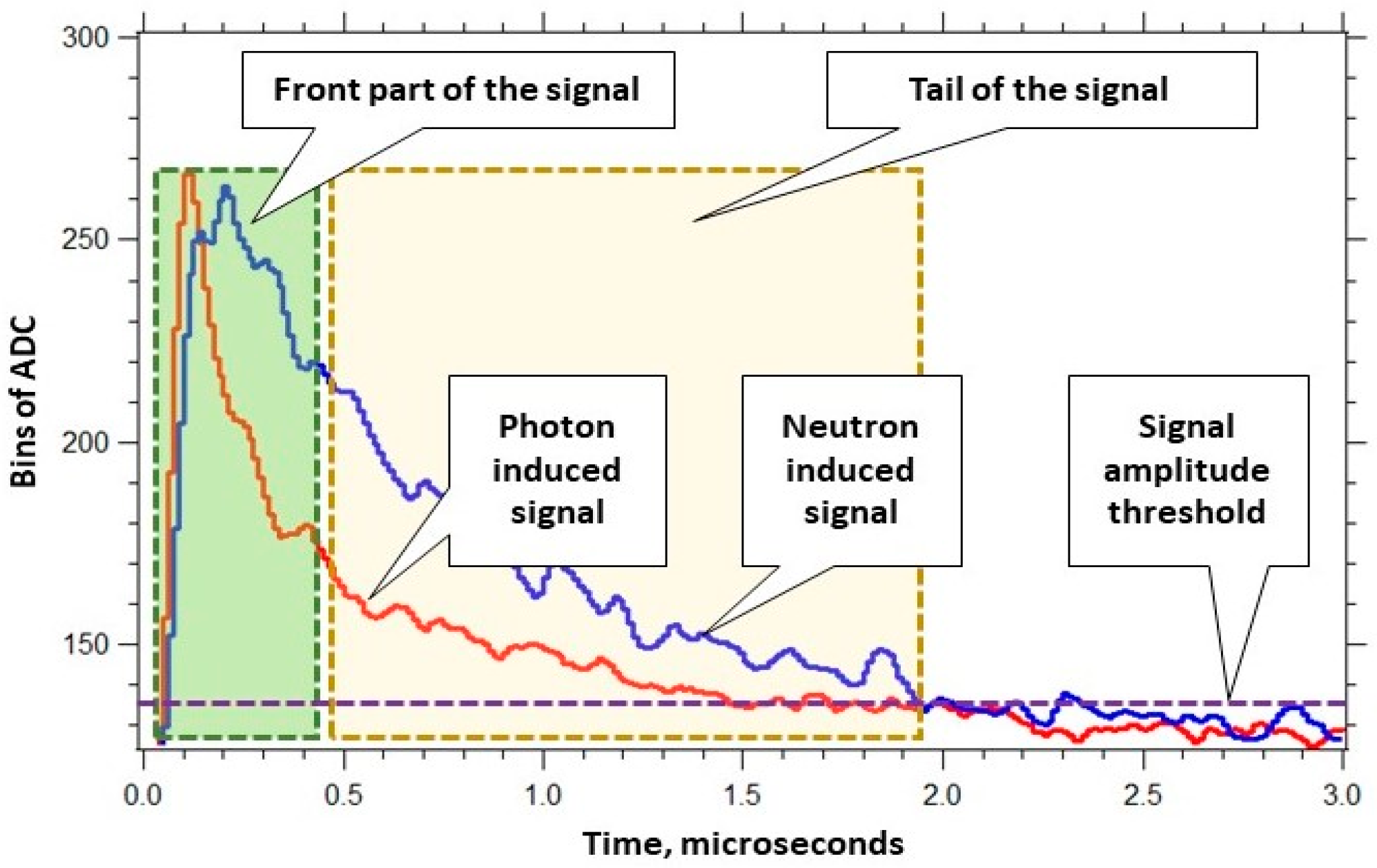
3.2. Radiation Measurements
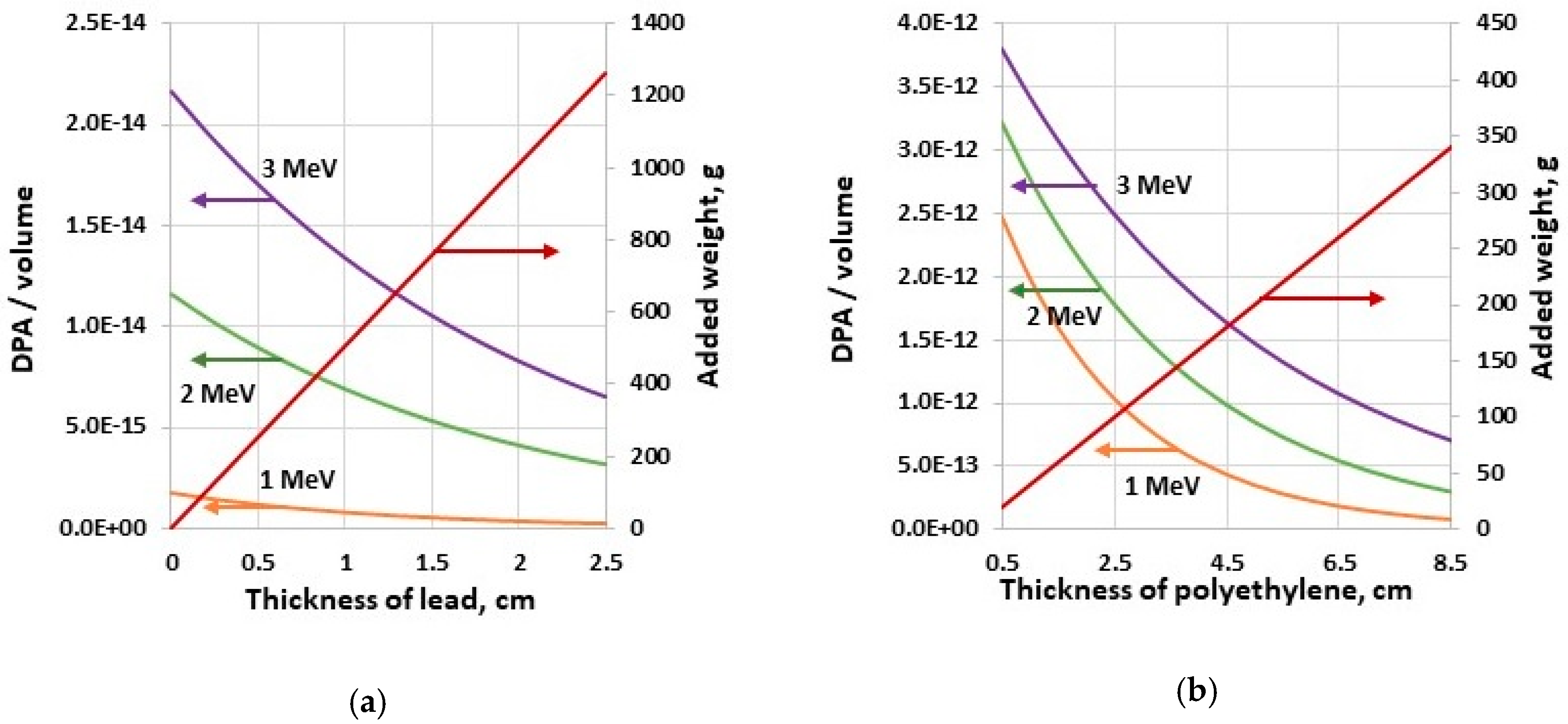
3.3. Radiation Damage Evaluation
- Case 0: t1 = 0 mm, t2 = 0 mm. The DPA per incident gamma ray and DPA per incident neutron were calculated without shielding.
- Case 1: t1 = 0 mm, t2 = 5 mm. A single layer of polyethylene was used. The added weight of the polyethylene to the robotic platform would be 98 g.
- Case 2: t1 = 1 mm, t2 = 0 mm. A single layer of lead was used to shield the controller. The weight of the added lead would be 227 g.
- Case 3: t1 = 1 mm, t2 = 5 mm. Two layers—lead and polyethylene—were used. The added weight of the two-layer shielding would be 340 g.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Otake, K.; Yoshida, K.; Tadokoro, S.; Nishimura, T.; Yoshida, T.; Koyanagi, E.; Fukushima, M.; et al. Emergency response to the nuclear accident at the Fukushima Daiichi nuclear power plants using mobile rescue robots. J. Field Robot. 2013, 30, 44–63. [Google Scholar] [CrossRef]
- Steinhauser, G.; Brandl, A.; Johnson, T. Comparison of the Chernobyl and Fukushima nuclear accidents: A review of the environmental impacts. Sci. Total Environ. 2014, 471, 800–817. [Google Scholar] [CrossRef] [PubMed]
- Sanada, Y.; Torii, T. Aerial radiation monitoring around the Fukushima Daiichi Nuclear Power Plant using an unmanned helicopter. J. Environ. Radioact. 2015, 139, 294–299. [Google Scholar] [CrossRef]
- Sen, T.; Moore, L.; Hess, T. An organizational decision support system for managing the DOE hazardous waste cleanup program. Decis. Support Syst. 2000, 29, 89–109. [Google Scholar] [CrossRef]
- Till, J.; Grogan, H. Radiological Risk Assessment and Environmental Analysis; Oxford University Press: New York, NY, USA, 2008; ISBN 9780195127270. [Google Scholar]
- Doyle, J. Nuclear Safeguards, Security and Nonproliferation; Elsevier: Oxford, UK, 2008; ISBN 9780750686730. [Google Scholar]
- Lee, W.; Ojovan, M.; Jantzen, C. Radioactive Waste Management and Contaminated Site Clean-Up: Processes, Technologies and International Experience; Woodhead Publishing: Cambridge, UK, 2013; ISBN 9780857094353. [Google Scholar]
- Moody, K.; Grant, P.; Hutcheon, I.; Varoufakis, Y. Nuclear Forensic Analysis; Taylor & Francis: New York, NY, USA, 2014; ISBN 9780429251863. [Google Scholar]
- Connor, D.; Martin, P.; Smith, N.; Payne, L.; Hutton, C.; Payton, O.; Yamashiki, Y.; Scott, T. Application of airborne photogrammetry for the visualization and assessment of contamination migration arising from a Fukushima waste storage facility. Environ. Pollut. 2018, 234, 610–619. [Google Scholar] [CrossRef] [PubMed]
- Hartman, J.; Barzilov, A.; Novikov, I. Remote sensing of neutron and gamma radiation using unmanned aerial system. In Proceedings of the IEEE, Nuclear Science Symposium and Medical Imaging Conference, San Diego, CA, USA, 31 October–7 November 2015; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Han, J.; Chen, Y. Multiple UAV formations for cooperative source seeking and contour mapping of a radiative signal field. J. Intell. Robot. Syst. 2014, 74, 323–332. [Google Scholar] [CrossRef]
- Cook, Z.; Kazemeini, M.; Barzilov, A.; Yim, W. Low-altitude contour mapping of radiation fields using UAS swarm. Intell. Serv. Robot. 2019, 12, 219–230. [Google Scholar] [CrossRef]
- Kazemeini, M.; Cook, Z.; Lee, J.; Barzilov, A.; Yim, W. Plug-and-play radiation sensor components for unmanned aerial system platform. J. Radioanal. Nucl. Chem. 2018, 318, 1797–1803. [Google Scholar] [CrossRef]
- Kazemeini, M.; Vargas, J.; Barzilov, A.; Yim, W. Gamma ray measurements using unmanned aerial systems. In Use of Gamma Radiation Techniques in Peaceful Applications; Almayah, B.A., Ed.; Chapter 6; IntechOpen: London, UK, 2019. [Google Scholar] [CrossRef] [Green Version]
- Potter, D. Smart plug and play sensors. IEEE Instrum. Meas. Mag. 2002, 5, 28–30. [Google Scholar] [CrossRef]
- Soerensen, A.; Falsig, S.; Ugilt, R. A step toward ‘plug and play’ robotics with SoC technology. In Emerging Trends in Mobile Robotics; Fujimoto, H., Tokhi, M., Virk, G., Eds.; World Scientific Publishing: Singapore, 2010; pp. 415–422. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Zhang, L.; Gong, W. Information fusion of aerial images and LIDAR data in urban areas: Vector-stacking, re-classification and post-processing approaches. Int. J. Remote Sens. 2011, 32, 69–84. [Google Scholar] [CrossRef]
- Tiedemann, T.; Backe, C.; Vogele, T.; Conradi, P. An automotive distributed mobile sensor data collection with machine learning based data fusion and analysis on a central backend system. Proc. Technol. 2016, 26, 570–579. [Google Scholar] [CrossRef] [Green Version]
- Jovanoska, S.; Brötje, M.; Koch, W. Multisensor data fusion for UAV detection and tracking. In Proceedings of the 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Hartman, J.; Yazdanpanah, A.P.; Barzilov, A.; Regentova, E. 3D imaging using combined neutron-photon fan-beam tomography: A Monte Carlo study. Appl. Radiat. Isot. 2016, 111, 110–116. [Google Scholar] [CrossRef] [PubMed]
- Licata, M.; Joyce, M.J. Concealed nuclear material identification via combined fast-neutron/γ-ray computed tomography (FNGCT): A Monte Carlo study. JINST 2018, 13, P02013. [Google Scholar] [CrossRef]
- Barzilov, A.; Kazemeini, M. Dual-Mode Radiation Sensor for UAS Platforms. Proceedings 2020, 42, 37. [Google Scholar] [CrossRef] [Green Version]
- S1000. Available online: https://www.dji.com/spreading-wings-s1000 (accessed on 20 May 2020).
- Robot Operating System. Available online: http://www.ros.org (accessed on 20 May 2020).
- Pixhawk. Available online: http://pixhawk.org (accessed on 20 May 2020).
- Grejner-Brzezinska, D.; Wielgosz, P.; Kashani, I. On accuracy and reliability of instantaneous network RTK as a function of network geometry, station separation, and data processing strategy. GPS Solut. 2005, 9, 212–225. [Google Scholar] [CrossRef]
- Rizos, S. Network RTK research and implementation—A geodetic perspective. J. Glob. Position Syst. 2002, 1, 144–150. [Google Scholar] [CrossRef] [Green Version]
- Swift Duro GNSS Receiver. Available online: https://www.swiftnav.com/duro (accessed on 20 May 2020).
- Swift Piksi Multi GNSS Module. Available online: https://www.swiftnav.com/piksi-multi (accessed on 20 May 2020).
- Rugged L1/L2 GPS/GLONASS Active Antenna. Available online: https://www.maxtena.com/products/f-gps/m1227hct-a2-sma (accessed on 20 May 2020).
- Guss, P.P.; Stampahar, T.G.; Mukhopadhyay, S.; Barzilov, A.; Guckes, A. Scintillation properties of a Cs2LiLa(Br6)90% (Cl6)10%: Ce3+ (CLLBC) crystal. Proc. SPIE 2014, 9215, 921505. [Google Scholar] [CrossRef]
- Glodo, J.; Hawrami, R.; Shah, K. Development of Cs2LiYCl6 scintillator. J. Cryst. Growth 2013, 379, 73–78. [Google Scholar] [CrossRef]
- Guckes, A.; Barzilov, A.; Guss, P. Directional detection of neutrons and photons using elpasolites: Computational study. Radiat. Meas. 2019, 124, 127–131. [Google Scholar] [CrossRef] [Green Version]
- D’Olympia, N.; Chowdhury, P.; Lister, C.J.; Glodo, J.; Hawrami, R.; Shah, K.; Shirwadkar, U. Pulse-shape analysis of CLYC for thermal neutrons, fast neutrons, and gamma-rays. Nucl. Instrum. Methods A 2013, 714, 121–127. [Google Scholar] [CrossRef]
- Giaz, A.; Pellegri, L.; Camera, F.; Blasi, N.; Brambilla, S.; Ceruti, S.; Million, B.; Riboldi, S.; Cazzaniga, C.; Gorini, G.; et al. The CLYC-6 and CLYC-7 response to gamma-rays, fast and thermal neutrons. Nucl. Instrum. Methods A 2016, 810, 132–139. [Google Scholar] [CrossRef]
- eMorpho MCA. Available online: http://www.bridgeportinstruments.com/products/pmt/emorpho.html (accessed on 20 May 2020).
- Nordlund, K.; Zinkle, S.J.; Sand, A.E.; Granberg, F.; Averback, R.S.; Stoller, R.E.; Suzudo, T.; Malerba, L.; Banhart, F.; Weber, W.J.; et al. Primary radiation damage: A review of current understanding and models. J. Nucl. Mater. 2018, 512, 450–479. [Google Scholar] [CrossRef]
- Fasso, A.; Ferrari, A.; Smirnov, G.; Sommerer, F.; Vlachoudis, V. FLUKA realistic modeling of radiation induced damage. Prog. Nucl. Sci. Technol. 2011, 2, 769–775. [Google Scholar] [CrossRef]
- Battistoni, G.; Cerutti, F.; Fasso, A.; Ferrari, A.; Muraro, S.; Ranft, J.; Roesler, S.; Sala, P.R. The FLUKA code: Description and benchmarking. AIP Conf. Proc. 2007, 896, 31–49. [Google Scholar] [CrossRef] [Green Version]
- Battistoni, G.; Boehlen, T.; Cerutti, F.; Chin, P.W.; Esposito, L.S.; Fassò, A.; Ferrari, A.; Lechner, A.; Empl, A.; Mairani, A.; et al. Overview of the FLUKA code. Ann. Nucl. Energy 2015, 82, 10–18. [Google Scholar] [CrossRef] [Green Version]
- Kinchin, G.H.; Pease, R.S. The displacement of atoms in solids by radiation. Rep. Prog. Phys. 1955, 18, 1–51. [Google Scholar] [CrossRef]
- Norgett, M.J.; Robinson, M.T.; Torrens, I.M. A proposed method of calculating displacement dose rates. Nucl. Eng. Des. 1975, 33, 50–54. [Google Scholar] [CrossRef]
- Hartman, J.; Barzilov, A.; Peters, E.E.; Yates, S.W. Measurements of response functions of EJ-299-33A plastic scintillator for fast neutrons. Nucl. Instrum. Methods A 2015, 804, 137–143. [Google Scholar] [CrossRef]
- Medhat, M. Artificial intelligence methods applied for quantitative analysis of natural radioactive sources. Ann. Nucl. Energy 2012, 45, 73–79. [Google Scholar] [CrossRef]
- Barzilov, A.; Kessler, B.; Womble, P. Analysis of 14-MeV neutron induced gamma-ray spectra using multiwavelets. Radiat. Meas. 2015, 79, 43–49. [Google Scholar] [CrossRef]
- Dess, B.W.; Cardarelli, I.I.J.; Thomas, M.J.; Stapleton, J.; Kroutil, R.T.; Miller, D.; Curry, T.; Small, G.W. Automated detection of radioisotopes from an aircraft platform by pattern recognition analysis of gamma-ray spectra. J. Environ. Radioact. 2018, 192, 654–666. [Google Scholar] [CrossRef] [PubMed]
- Mariscotti, M.A. A method for automatic identification of peaks in the presence of background and its application to spectrum analysis. Nucl. Instrum. Methods 1967, 50, 309–320. [Google Scholar] [CrossRef]
- Kazemeini, M.; Barzilov, A.; Lee, J.; Yim, W. Integration of CZT and CLYC radiation detectors into robotic platforms using ROS. AIP Conf. Proc. 2019, 2160, 050019-1–050019-6. [Google Scholar] [CrossRef]
- Uglov, V.V.; Kvasov, N.T.; Remnev, G.E.; Polikar, R.V. On the physical nature of the threshold displacement energy in radiation physics. J. Synch. Investig. 2015, 9, 1206–1212. [Google Scholar] [CrossRef]
- Nordlund, K.; Zinkle, S.J.; Sand, A.E.; Granberg, F.; Averback, R.S.; Stoller, R.; Suzudo, T.; Malerba, L.; Banhart, F.; Weber, W.J.; et al. Improving atomic displacement and replacement calculations with physically realistic damage models. Nat. Commun. 2018, 9, 1084. [Google Scholar] [CrossRef]
- Silva, M. Ionizing radiation detectors. In Evolution of Ionizing Radiation Research; Chapter 8; Nenoi, M., Ed.; IntechOpen: London, UK, 2015. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Photon Energy, MeV | FWHM Energy Resolution (%) |
|---|---|
| 0.662 | 5.0 |
| 1.173 | 3.6 |
| 1.332 | 3.3 |
| Neutron Energy, MeV | DPA per Incident Neutron (×10−22) | |||
|---|---|---|---|---|
| Case 0 | Case 1 | Case 2 | Case 3 | |
| 1.0 | 6.9 | 6.0 | 4.6 | 3.5 |
| 2.0 | 8.4 | 6.4 | 5.3 | 4.1 |
| 3.0 | 9.5 | 7.3 | 6.8 | 5.3 |
| Photon Energy, MeV | DPA per Incident Photon (×10−25) | |||
|---|---|---|---|---|
| Case 0 | Case 1 | Case 2 | Case 3 | |
| 1.0 | 3.9 | 3.0 | 0.28 | 0.09 |
| 2.0 | 26.0 | 14.6 | 0.47 | 0.27 |
| 3.0 | 48.6 | 38.9 | 2.9 | 0.35 |
| Photon Energy, MeV | DPA per Incident Photon (×10−27) |
|---|---|
| 1.0 | 1.8 |
| 2.0 | 8.2 |
| 3.0 | 14.4 |
| Neutron Energy, MeV | DPA per Incident Photon (×10−23) |
|---|---|
| 1.0 | 5.3 |
| 2.0 | 8.0 |
| 3.0 | 10.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barzilov, A.; Kazemeini, M. Unmanned Aerial System Integrated Sensor for Remote Gamma and Neutron Monitoring. Sensors 2020, 20, 5529. https://doi.org/10.3390/s20195529
Barzilov A, Kazemeini M. Unmanned Aerial System Integrated Sensor for Remote Gamma and Neutron Monitoring. Sensors. 2020; 20(19):5529. https://doi.org/10.3390/s20195529
Chicago/Turabian StyleBarzilov, Alexander, and Monia Kazemeini. 2020. "Unmanned Aerial System Integrated Sensor for Remote Gamma and Neutron Monitoring" Sensors 20, no. 19: 5529. https://doi.org/10.3390/s20195529
APA StyleBarzilov, A., & Kazemeini, M. (2020). Unmanned Aerial System Integrated Sensor for Remote Gamma and Neutron Monitoring. Sensors, 20(19), 5529. https://doi.org/10.3390/s20195529