UAV Mission Planning Resistant to Weather Uncertainty

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Literature Review
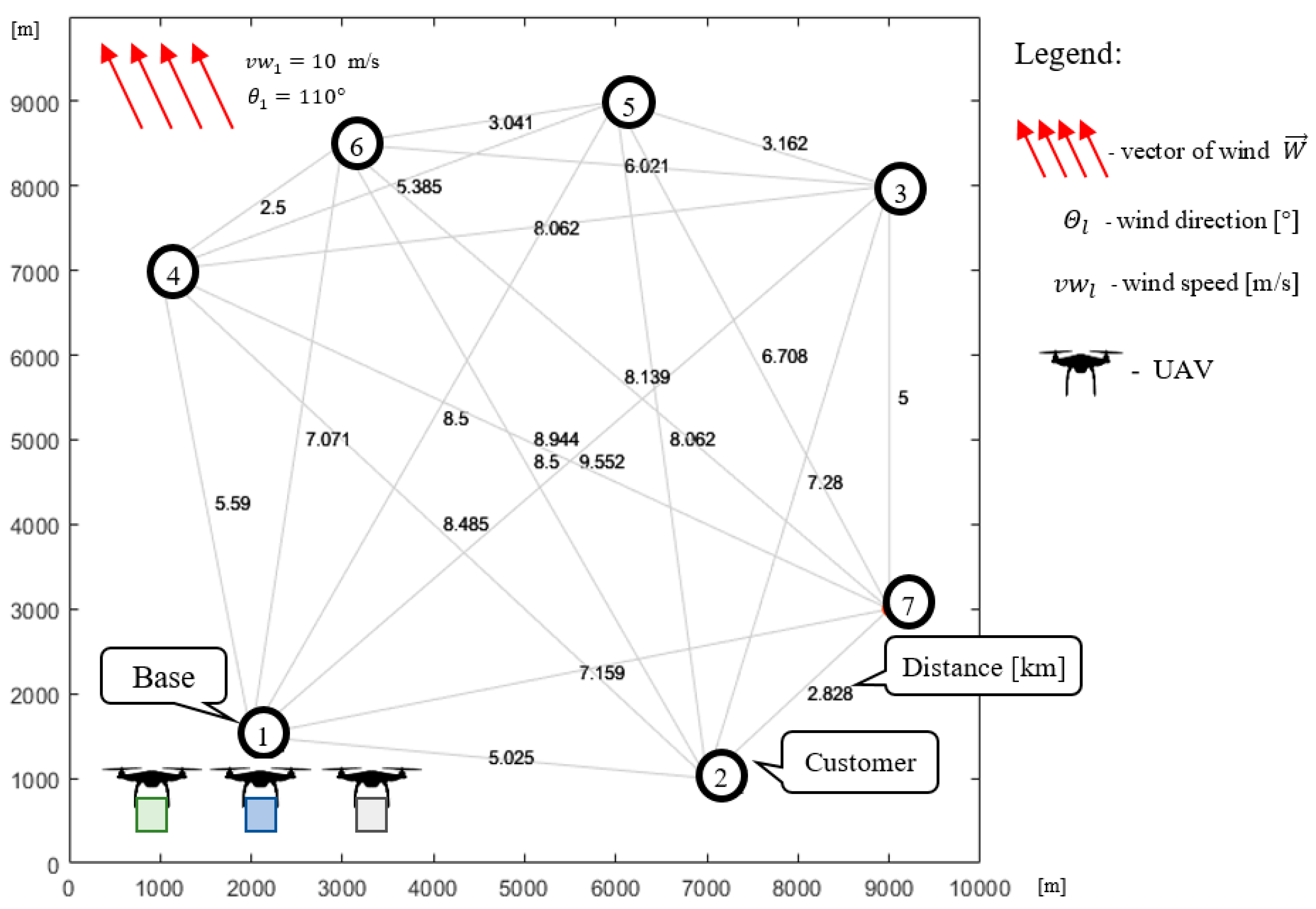
3. A Motivational Example
4. Modeling
4.1. Assumptions
- -
- The weather forecast is known in advance with sufficient accuracy to specify the so-called weather time windows .
- -
- The weather time windows can be subdivided into flying time windows .
- -
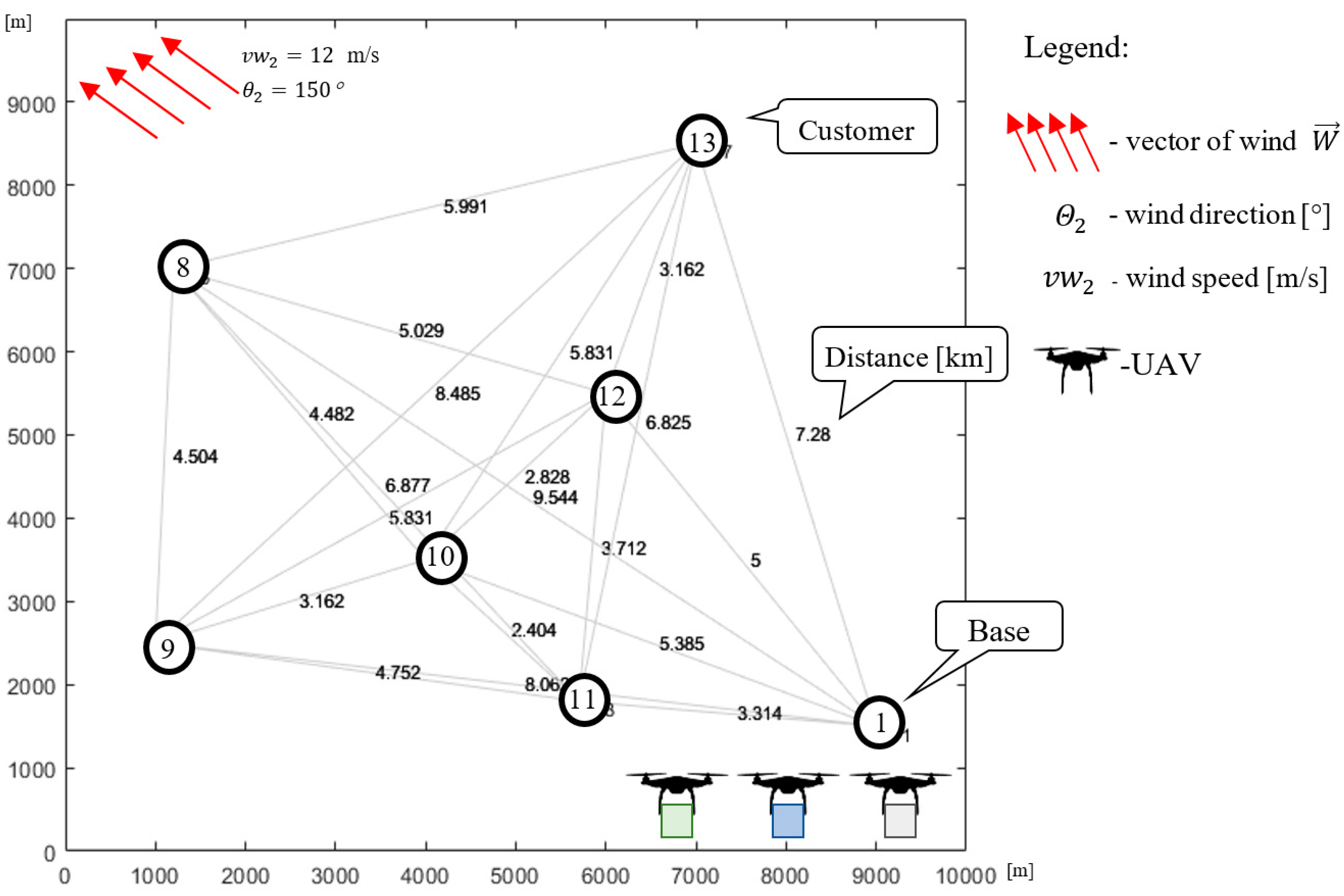
- The weather (which is known in advance) is specified by vector where is the wind speed and is the direction of wind for each . Vector is constant for a given weather time window.
- -
- Every route traveled starts and terminates within a given flying time window.
- -
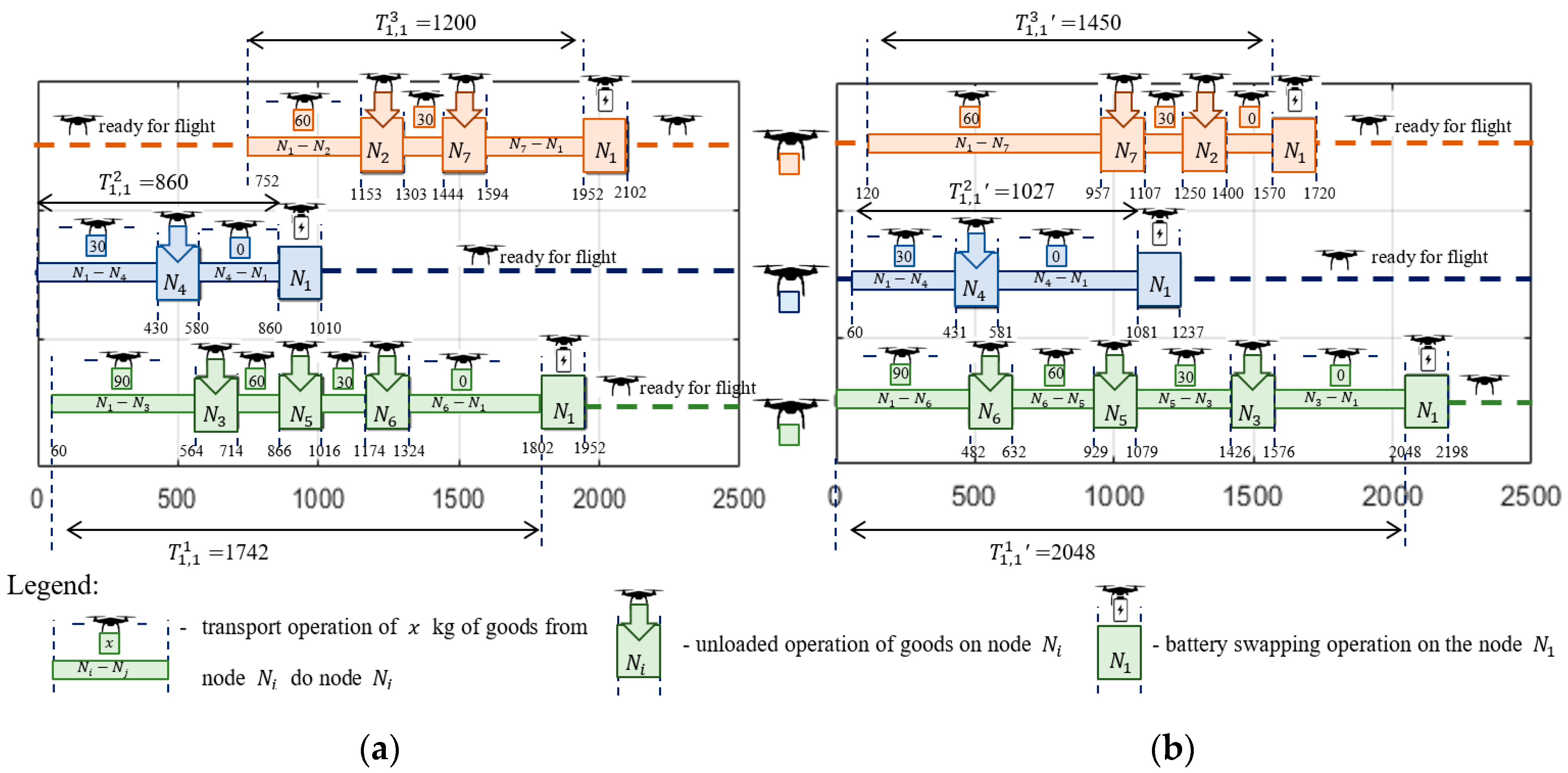
- All UAVs are charged to their full energy capacity before the start of a flying time window, and a UAV can only fly once during a flying time window.
- -
- The same kind of cargo is delivered to different customers in different amounts (kg).
- -
- The weight of a UAV is decreased as the cargo is successively unloaded at customers located along its route.
- -
- The network consists of customer locations (delivery points) and flying corridors.
- -
- Strategy 1—which assumes that a UAV travels at a constant ground speed. The airspeed must compensate adverse changes in wind direction and speed.
- -
- Strategy 2—which assumes that the UAV airspeed is constant throughout the mission. The ground speed is different for different segments and depends of the wind parameters specified by .
4.2. Declarative Model
| Parameters | |
| Network | |
| graph of a transportation network: is a set of nodes, is a set of edges | |
| subgraph of representing the mth cluster in the lth flying time window: and | |
| demand at node , | |
| priority of the node , | |
| travel distance from node to node | |
| travel time from node to node | |
| time spent on take-off and landing of a UAV | |
| time interval at which UAVs can take off from the base | |
| binary variable corresponding to crossed edges | |
| UAV Technical Parameters | |
| K | size of the fleet of UAVs |
| Q | maximum loading capacity of a UAV |
| aerodynamic drag coefficient of a UAV | |
| A | front facing area of a UAV |
| ep | empty weight of a UAV |
| D | air density |
| b | width of a UAV |
| maximum energy capacity of a UAV | |
| Environmental Parameters | |
| time horizon | |
| weather time window : , / is a start/end time of | |
| flying time window : , / is a start time of | |
| wind speed in the lth flying time window | |
| wind direction in the lth flying time window | |
| airspeed of a UAV traveling from node to node in the lth flying time window | |
| heading angle, angle of the airspeed vector when the UAV travels from node to node | |
| ground speed of a UAV travelling from node to node in the lth flying time window | |
| course angle, angle of the ground speed vector when the UAV travels from node to node | |
| Decision Variables | |
| binary variable used to indicate if the kth UAV travels from node to node | |
| time at which the kth UAV arrives at node | |
| weight of freight delivered to node by the kth UAV | |
| weight of freight carried from node to node by the kth UAV | |
| energy per unit of time, consumed by kth UAV during a flight from node to node | |
| take-off time of the kth UAV | |
| total weight of freight delivered to node | |
| route of the kth UAV in the mth cluster in the lth flying time window , , | |
| Sets | |
| set of times —schedule of the kth UAV | |
| family of —schedule of UAV fleet | |
| set of —payload weight delivered by the kth UAV | |
| family of | |
| set of UAV routes | |
| sub-mission in the mth cluster in the lth flying time window | |
- -
- Strategy 1—ground speed is constant and airs peed is calculated from:
- -
5. Problem Formulation
- —a set of decision variables determining sub-mission,
- —a set of UAV routes,
- —a schedule of a UAV fleet,
- —a set of payload weights delivered by the UAVs,
- —a finite set of decision variable domain descriptions,
- —a set of constraints specifying the relationships between UAV routes, UAV schedules, and transported materials Formulae (3)–(32).
6. Computational Experiments
6.1. Cluster #1
6.2. Cluster #2
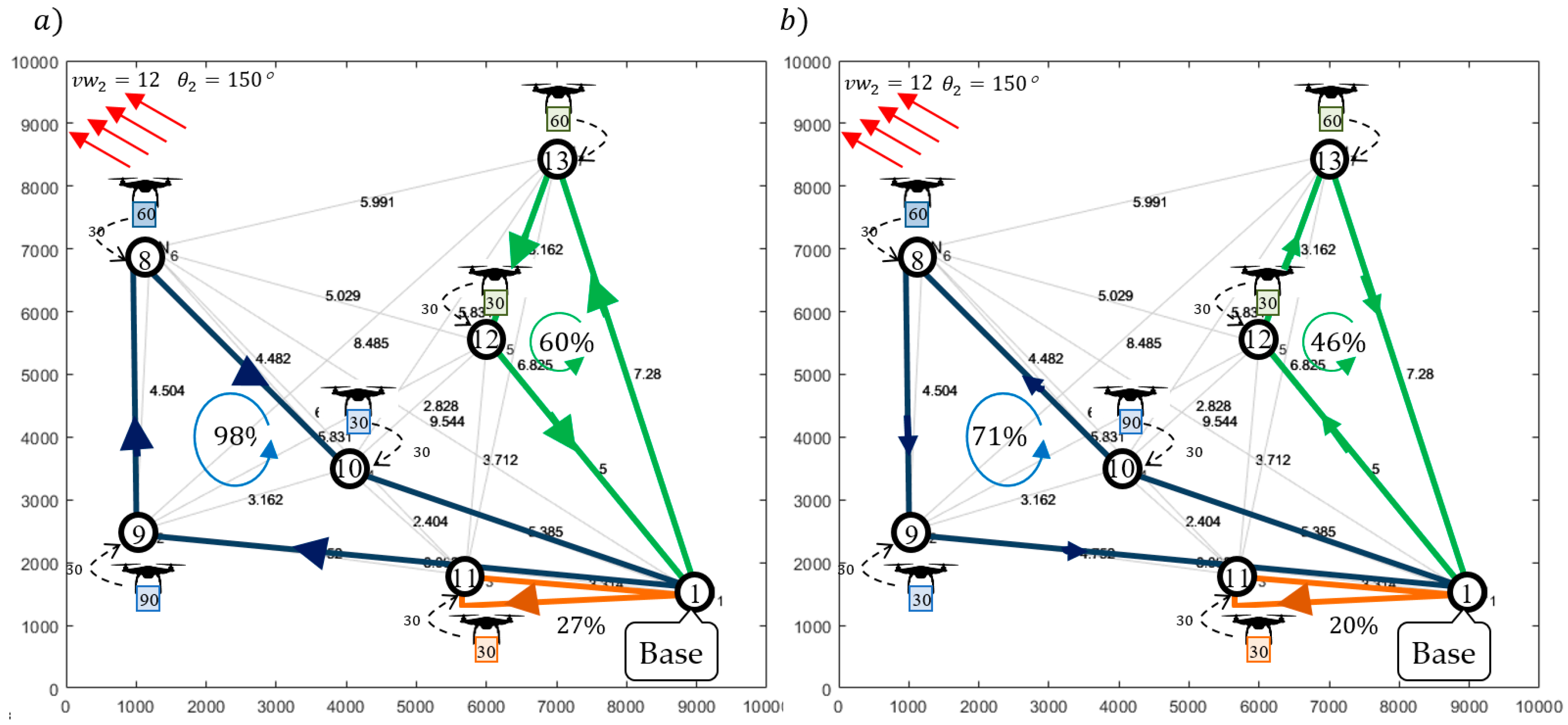
6.3. Mission Planning
6.4. Quantitative Results
- -
- Interactive (i.e., online: s) support can be provided for networks consisting of no more than eight nodes. In practice, this means limiting decision making supported by DSSs to the distribution networks not exceeding eight nodes.
- -
- An increase in the number of UAVs increases the route resistance (i.e., increasing of and ) to changes in weather conditions. For example, in a network of four nodes, the change from two to four UAVs increases value from 24.8 to 29.4 and from 28.1 to 33.9 for Strategy 1 (see yellow cells), as well as changing from 18.1 to 18.5 and from 19.0 to 19.2 for Strategy 2 (see green cells).
- -
- The and values for route resistance in Strategy 2 are limited by the value of the airspeed (). This type of restriction does not exist in Strategy 1. This means that in situations where the wind speed exceeds the value vw > 20 m/s, it is recommended to use Strategy 1 (for this strategy, it is possible to get vMIN and above 20 m/s).
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bocewicz, G.; Nielsen, P.; Banaszak, Z.; Thibbotuwawa, A. Deployment of Battery Swapping Stations for Unmanned Aerial Vehicles Subject to Cyclic Production Flow Constraints. In Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2018; pp. 73–87. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle Routing Problems for Drone Delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 70–85. [Google Scholar] [CrossRef] [Green Version]
- Thibbotuwawa, A. Unmanned Aerial Vehicle Fleet Mission Planning Subject to Changing Weather Conditions. Ph.D. Thesis, Og Naturvidenskabelige Fakultet, Aalborg Universitet, Aalborg, Denmark, 2020. in print. [Google Scholar]
- Thibbotuwawa, A.; Bocewicz, G.; Zbigniew, B.; Nielsen, P. A Solution Approach for UAV Fleet Mission Planning in Changing Weather Conditions. Appl. Sci. 2019, 9, 3972. [Google Scholar] [CrossRef] [Green Version]
- Sung, I.; Nielsen, P. Zoning a Service Area of Unmanned Aerial Vehicles for Package Delivery Services. J. Intell. Robot. Syst. 2019. [Google Scholar] [CrossRef]
- Nielsen, L.D.; Sung, I.; Nielsen, P. Convex decomposition for a coverage path planning for autonomous vehicles: Interior extension of edges. Sensors 2019, 19, 4165. [Google Scholar] [CrossRef] [Green Version]
- Zhen, L.; Li, M.; Laporte, G.; Wang, W. A vehicle routing problem arising in unmanned aerial monitoring. Comput. Oper. Res. 2019, 105, 1–11. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. UAV Mission Planning Subject to Weather Forecast Constraints. In Advances in Intelligent Systems and Computing; Herrera-Viedma, E., Vale, Z., Nielsen, P., Martin Del Rey, A., CVR, Eds.; Springer: Cham, Switzerland, 2020; pp. 65–76. [Google Scholar] [CrossRef]
- Kinney, G.W.; Hill, R.R.; Moore, J.T. Devising a quick-running heuristic for an unmanned aerial vehicle (UAV) routing system. J. Oper. Res. Soc. 2005, 56, 776–786. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. UAVs Fleet Mission Planning Subject to Weather Fore-Cast and Energy Consumption Constraints; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Tseng, C.M.; Chau, C.K.; Elbassioni, K.; Khonji, M. Autonomous Recharging and Flight Mission Planning for Battery-operated Autonomous Drones. arXiv 2017, arXiv:1703.10049. [Google Scholar]
- Drucker, N.; Penn, M.; Strichman, O. Cyclic routing of unmanned aerial vehicles. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2016; Volume 9676, pp. 125–141. [Google Scholar] [CrossRef] [Green Version]
- Radzki, G.; Thibbotuwawa, A.; Bocewicz, G. UAVs flight routes optimization in changing weather conditions—Constraint programming approach. Appl. Comput. Sci. 2019, 15, 5–17. [Google Scholar]
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Zbigniew, B. Planning deliveries with UAV routing under weather forecast and energy consumption constraints. IFAC-PapersOnLine 2019, 52, 820–825. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Energy Consumption in Unmanned Aerial Vehicles: A Review of Energy Consumption Models and Their Relation to the UAV Routing. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2019; pp. 173–184. [Google Scholar] [CrossRef]
- Guerriero, F.; Surace, R.; Loscrí, V.; Natalizio, E. A multi-objective approach for unmanned aerial vehicle routing problem with soft time windows constraints. Appl. Math. Model. 2014, 38, 839–852. [Google Scholar] [CrossRef]
- Sundar, K.; Venkatachalam, S.; Rathinam, S. An Exact Algorithm for a Fuel-Constrained Autonomous Vehicle Path Planning Problem. arXiv 2016, arXiv:1604.08464. [Google Scholar]
- Goerzen, C.; Kong, Z.; Mettler, B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance. J. Intell. Robot. Syst. 2010, 57, 65–100. [Google Scholar] [CrossRef]
- Wang, X.; Poikonen, S.; Golden, B. The Vehicle Routing Problem with Drones: Several worst-case results. Optim. Lett. 2017, 11, 679. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006; Available online: http://planning.cs.uiuc.edu (accessed on 13 January 2020).
- Coelho, B.N.; Coelho, V.N.; Coelho, I.M. A multi-objective green UAV routing problem. Comput. Oper. Res. 2017, 88, 306–315. [Google Scholar] [CrossRef]
- Enright, J.J.; Frazzoli, E.; Pavone, M.; Ketan, S. UAV Routing and Coordination in Stochastic, Dynamic Environments. In Handbook of Unmanned Aerial Vehicles; Valavanis, K., Vachtsevanos, G., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 2079–2109. [Google Scholar] [CrossRef] [Green Version]
- Adbelhafiz, M.; Mostafa, A.; Girard, A. Vehicle Routing Problem Instances: Application to Multi-UAV Mission Planning. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2010. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Shen, L.; Zheng, Y. Genetic Algorithm Based Approach for Multi-UAV Cooperative Reconnaissance Mission Planning Problem BT—Foundations of Intelligent Systems; Esposito, F., Raś, Z.W., Malerba, D., Semeraro, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 101–110. [Google Scholar]
- Khosiawan, Y.; Nielsen, I.; Do, N.A.D.; Yahya, B.N. Concept of Indoor 3D-Route UAV Scheduling System. In Information Systems Architecture and Technology, Proceedings of 36th International Conference on Information Systems Architecture and Technology—ISAT 2015—Part I; Borzemski, L., Grzech, A., Świkatek, J., Wilimowska, Z., Eds.; Springer: Cham, Switzerland, 2016; pp. 29–40. [Google Scholar]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Factors Affecting Energy Consumption of Unmanned Aerial Vehicles: An Analysis of How Energy Consumption Changes in Relation to UAV Routing. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2019; pp. 228–238. [Google Scholar] [CrossRef]
- Cho, J.; Lim, G.; Biobaku, T. Safety and Security Management with Unmanned Aerial Vehicle in Oil and Gas Industry. Procedia Manuf. 2015, 3, 1343–1349. [Google Scholar] [CrossRef] [Green Version]
- Bocewicz, G.; Nielsen, P.; Banaszak, Z.; Thibbotuwawa, A. Routing and Scheduling of Unmanned Aerial Vehicles Subject to Cyclic Production Flow Constraints. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2019; pp. 75–86. [Google Scholar] [CrossRef]
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Maza, I.; Ollero, A. Multiple UAV Cooperative Searching Operation Using Polygon Area Decomposition and Efficient Coverage Algorithms BT—Distributed Autonomous Robotic Systems 6; Alami, R., Chatila, R., Asama, H., Eds.; Springer: Tokyo, Japan, 2007; pp. 221–230. [Google Scholar]
- Habib, D.; Jamal, H.; Khan, S.A. Employing multiple unmanned aerial vehicles for co-operative path planning. Int. J. Adv. Robot. Syst. 2013, 10, 235. [Google Scholar] [CrossRef]
- Sundar, K.; Rathinam, S. Algorithms for routing an unmanned aerial vehicle in the presence of refueling depots. IEEE Trans. Autom. Sci. Eng. 2014, 11, 287–294. [Google Scholar] [CrossRef]
- Rubio, J.C.; Kragelund, S. The trans-pacific crossing: Long range adaptive path planning for UAVs through variable wind fields. In Proceedings of the Digital Avionics Systems Conference, Indianapolis, IN, USA, 2–16 October 2003; p. 8-B. [Google Scholar] [CrossRef]
- Nguyen, T.; Tsz-Chiu, A. Extending the Range of Delivery Drones by Exploratory Learning of Energy Models. In Proceedings of the 16th Conference on Autonomous Agents and MultiAgent Systems, São Paulo, Brazil, 8–12 May 2017; pp. 1658–1660. [Google Scholar]
- Xu, K.X.K.; Hong, X.H.X.; Gerla, M.G.M. Landmark routing in large wireless battlefield networks using UAVs. In Proceedings of the MILCOM 2001 Communications for Network-Centric Operations: Creating the Information Force (Cat No01CH37277), McLean, VA, USA, 28–31 October 2001; Volume 1, pp. 230–234. [Google Scholar] [CrossRef] [Green Version]
- Gorecki, T.; Piet-Lahanier, H.; Marzat, J.; Balesdent, M. Cooperative guidance of UAVs for area exploration with final target allocation. IFAC Proc. Vol. 2013, 46, 260–265. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.F.; Guan, Z.W.; Song, Y.Q.; Chen, D.S. An optimization model of UAV route planning for road segment surveillance. J. Cent. South Univ. 2014, 21, 2501–2510. [Google Scholar] [CrossRef]
- Geyer, C.; Dey, D.; Singh, S. Prototype Sense-and-Avoid Sstemy for UAVs; Tech. Report, CMU-RI-TR-09-09; Robotics Institute, Carnegie Mellon University: Pittsburgh, PA, USA, 2009. [Google Scholar]
- Geyer, C.; Singh, S.; Chamberlain, L. Avoiding Collisions between Aircraft: State of the Art and Requirements for UAVs Operating in Civilian Airspace; Tech. Report, CMU-RI-TR-08-03; Robotics Institute, Carnegie Mellon University: Pittsburgh, PA, USA, 2008. [Google Scholar]
- Belkadi, A.; Abaunza, H.; Ciarletta, L. Distributed Path Planning for Controlling a Fleet of UAVs: Application to a Team of Quadrotors. IFAC-PapersOnLine 2017, 50, 15983–15989. [Google Scholar] [CrossRef]
- Zhan, W.; Wang, W.; Chen, N.; Wang, C. Efficient UAV path planning with multiconstraints in a 3D large battlefield environment. Math. Probl. Eng. 2014. [Google Scholar] [CrossRef]
- AIRBUS. Airbus’ Skyways Drone Trials World’s First Shore-to-Ship Deliveries. 2019. Available online: https://www.airbus.com/newsroom/press-releases/en/2019/03/airbus-skyways-drone-trials-worlds-first-shoretoship-deliveries.html (accessed on 13 January 2020).
- UAV R&D. Available online: https://www.kari.re.kr/eng/sub03_01_01.do (accessed on 13 January 2020).
- Fügenschuh, A.; Müllenstedt, D. Flight Planning for Unmanned Aerial Vehicles. Professur für Angewandte Mathematik, Helmut-Schmidt-Universität. In Angewandte Mathematik und Optimierung Schriftenreihe/Applied Mathematics and Optimization Series; Universität der Bundeswehr Hamburg: Hamburg, Germany, 2015. [Google Scholar]
- Rucco, A.; Aguiar, A.P.; Pereira, F.L.; Sousa, J.B.D. A Predictive Path-Following Approach for Fixed-Wing Unmanned Aerial Vehicles in Presence of Wind Disturbances. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2016; pp. 623–634. [Google Scholar]
- Luo, H.; Liang, Z.; Zhu, M.; Hu, X.; Wang, G. Integrated optimization of un-manned aerial vehicle task allocation and path planning under steady wind. PLoS ONE 2018, 13, e0194690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, S.J.; Lim, G.J.; Cho, J. Drone Flight Scheduling Under Uncertainty on Bat-tery Duration and Air Temperature. Comput. Ind. Eng. 2018. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameters of UAVs | Value | Unit |
|---|---|---|
| Payload capacity () | 90 | kg |
| Battery capacity () | 8000 | kJ |
| Airspeed () | 20 | m/s |
| Drag coefficient () | 0.54 | - |
| Front surface of UAV () | 1.2 | m |
| UAV width () | 8.7 | m |
| 1) | Assumptions | NDV | NC | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 4 | 2 | Strategy 1 | 29.80 | 3.73 | 24.8 | 28.1 | 19.17 | 3.71 | 24.6 | 28.2 | 29.8 | 3.74 | 24.8 | 28.1 | 828 | 356 |
| Strategy 2 | 19.1 | 3.82 | 18.1 | 19.0 | 19.18 | 3.78 | 18.1 | 19.1 | 19.1 | 3.76 | 18.1 | 19.0 | 828 | 356 | ||
| 3 | Strategy 1 | 13.59 | 3.89 | 29.4 | 33.9 | 13.59 | 3.97 | 29.4 | 33.9 | 13.59 | 3.95 | 29.4 | 33.9 | 1774 | 654 | |
| Strategy 2 | 13.57 | 3.75 | 18.5 | 19.2 | 13.57 | 3.96 | 18.5 | 19.2 | 13.57 | 3.81 | 18.5 | 19.2 | 1774 | 654 | ||
| 4 | Strategy 1 | 13.59 | 4.24 | 29.4 | 33.9 | 13.59 | 4.17 | 29.4 | 33.9 | 13.59 | 4.35 | 29.4 | 33.9 | 3076 | 1036 | |
| Strategy 2 | 13.57 | 4.31 | 18.5 | 19.2 | 13.59 | 4.28 | 18.5 | 19.2 | 13.57 | 4.36 | 18.5 | 19.2 | 3076 | 1036 | ||
| 6 | 2 | Strategy 1 | 35.67 | 4.44 | 23.6 | 25.6 | 22.62 | 4.23 | 23.6 | 25.6 | 22.62 | 4.60 | 23.6 | 25.6 | 3014 | 910 |
| Strategy 2 | 22.59 | 4.31 | 17.9 | 18.6 | 22.59 | 4.38 | 17.9 | 18.6 | 22.81 | 4.12 | 17.9 | 18.6 | 3014 | 910 | ||
| 3 | Strategy 1 | 19.4 | 7.12 | 25.8 | 27.7 | 19.40 | 5.25 | 25.8 | 27.7 | 19.4 | 8.08 | 25.8 | 27.7 | 7476 | 1902 | |
| Strategy 2 | 19.37 | 6.34 | 18.2 | 18.7 | 19.38 | 5.24 | 18.2 | 18.7 | 19.37 | 9.32 | 18.2 | 18.7 | 7476 | 1902 | ||
| 4 | Strategy 1 | 19.4 | 9.98 | 25.8 | 27.7 | 19.40 | 6.44 | 25.8 | 27.7 | 19.4 | 13.67 | 25.8 | 27.7 | 13,910 | 3528 | |
| Strategy 2 | 19.37 | 8.19 | 18.2 | 18.7 | 19.38 | 9.46 | 18.2 | 18.7 | 19.37 | 8.08 | 18.2 | 18.7 | 13,910 | 3528 | ||
| 8 | 2 | Strategy 1 | 22.62 | 46.04 | 20.9 | 25.6 | 24.21 | 7.93 | 18.8 | 25.1 | 22.62 | 8.63 | 23.6 | 25.6 | 9552 | 2248 |
| Strategy 2 | 22.59 | 102.93 | 17.9 | 18.6 | 24.18 | 281.67 | 17.7 | 18.6 | 22.59 | 9.43 | 17.9 | 18.6 | 9552 | 2248 | ||
| 3 | Strategy 1 | 22.62 | t > 300 | 23.6 | 25.6 | 20.62 | 19.94 | 25.3 | 26.9 | 25.15 | 231.63 | 18.8 | 24.2 | 25,898 | 5358 | |
| Strategy 2 | 25.13 | 59.49 | 17.8 | 18.2 | 23.79 | 71.73 | 17.8 | 18.6 | 25.13 | 126.89 | 17.8 | 18.2 | 25,898 | 5358 | ||
| 4 | Strategy 1 | 22.55 | t > 300 | 23.6 | 25.6 | 20.62 | 128.00 | 25.3 | 26.9 | 25.15 | 105.18 | 18.8 | 24.2 | 49,960 | 9800 | |
| Strategy 2 | 25.13 | 110.94 | 17.8 | 18.2 | 21.33 | 95.87 | 18.0 | 18.7 | 25.49 | 115.29 | 17.7 | 18.2 | 49,960 | 9800 | ||
| 10 | 2 | Strategy 1 | 27.54 | t > 300 | 18.9 | 22.9 | 28.59 | 183.53 | 18.2 | 22.8 | 29.46 | t > 300 | 17.8 | 21.7 | 21,402 | 4530 |
| Strategy 2 | 24.18 | t > 300 | 17.9 | 18.4 | 25.65 | t > 300 | 17.5 | 18.0 | 29.35 | t > 300 | 19.5 | 20.6 | 21,402 | 4530 | ||
| 3 | Strategy 1 | 28.38 | t > 300 | 18.7 | 22.5 | 23.83 | t > 300 | 20.0 | 25.1 | 24.29 | t > 300 | 18.9 | 25.3 | 59,920 | 11,502 | |
| Strategy 2 | 24.23 | t > 300 | 17.5 | 18.5 | 24.23 | t > 300 | 17.5 | 18.5 | 24.23 | t > 300 | 17.5 | 18.5 | 59,920 | 11,502 | ||
| 4 | Strategy 1 | 26.21 | t > 300 | 19.5 | 23.2 | 24.29 | t > 300 | 18.9 | 25.3 | 26.2 | t > 300 | 18.4 | 24.3 | 116,986 | 21,622 | |
| Strategy 2 | 26.18 | t > 300 | 17.6 | 18.3 | 26.19 | t > 300 | 17.3 | 18.4 | 26.19 | t > 300 | 17.3 | 18.4 | 116,986 | 21,622 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thibbotuwawa, A.; Bocewicz, G.; Radzki, G.; Nielsen, P.; Banaszak, Z. UAV Mission Planning Resistant to Weather Uncertainty. Sensors 2020, 20, 515. https://doi.org/10.3390/s20020515
Thibbotuwawa A, Bocewicz G, Radzki G, Nielsen P, Banaszak Z. UAV Mission Planning Resistant to Weather Uncertainty. Sensors. 2020; 20(2):515. https://doi.org/10.3390/s20020515
Chicago/Turabian StyleThibbotuwawa, Amila, Grzegorz Bocewicz, Grzegorz Radzki, Peter Nielsen, and Zbigniew Banaszak. 2020. "UAV Mission Planning Resistant to Weather Uncertainty" Sensors 20, no. 2: 515. https://doi.org/10.3390/s20020515
APA StyleThibbotuwawa, A., Bocewicz, G., Radzki, G., Nielsen, P., & Banaszak, Z. (2020). UAV Mission Planning Resistant to Weather Uncertainty. Sensors, 20(2), 515. https://doi.org/10.3390/s20020515