Attitude Trajectory Optimization to Ensure Balance Hexapod Locomotion

 , and
, and
Abstract
:1. Introduction
2. System Overview and Kinematics Modeling of the Large-Size Hexapod Robot
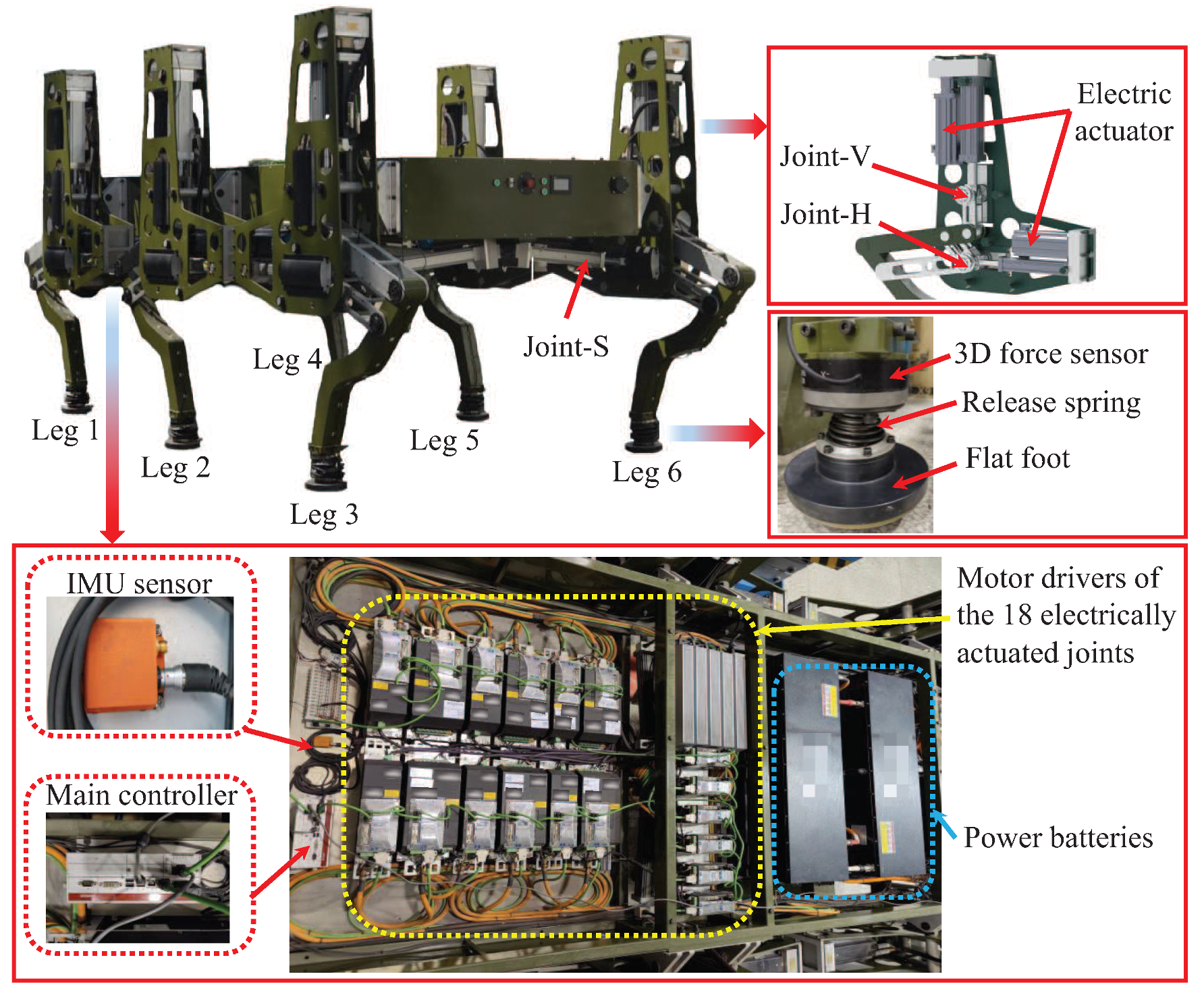
2.1. The Brief Introduction of the Large-Size Hexapod Robot System
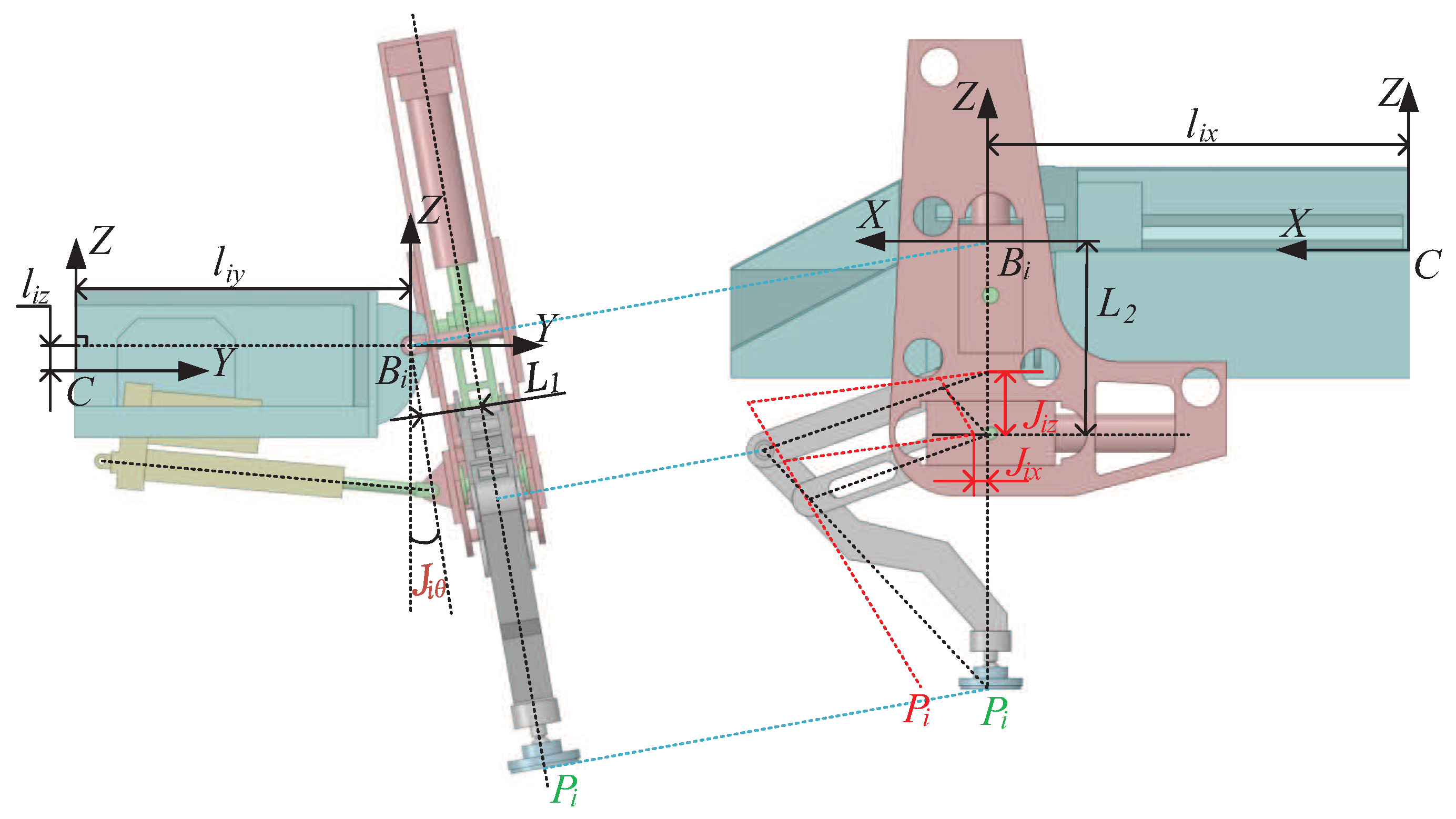
2.2. Kinematics Modeling of the Large-Size Hexapod Robot
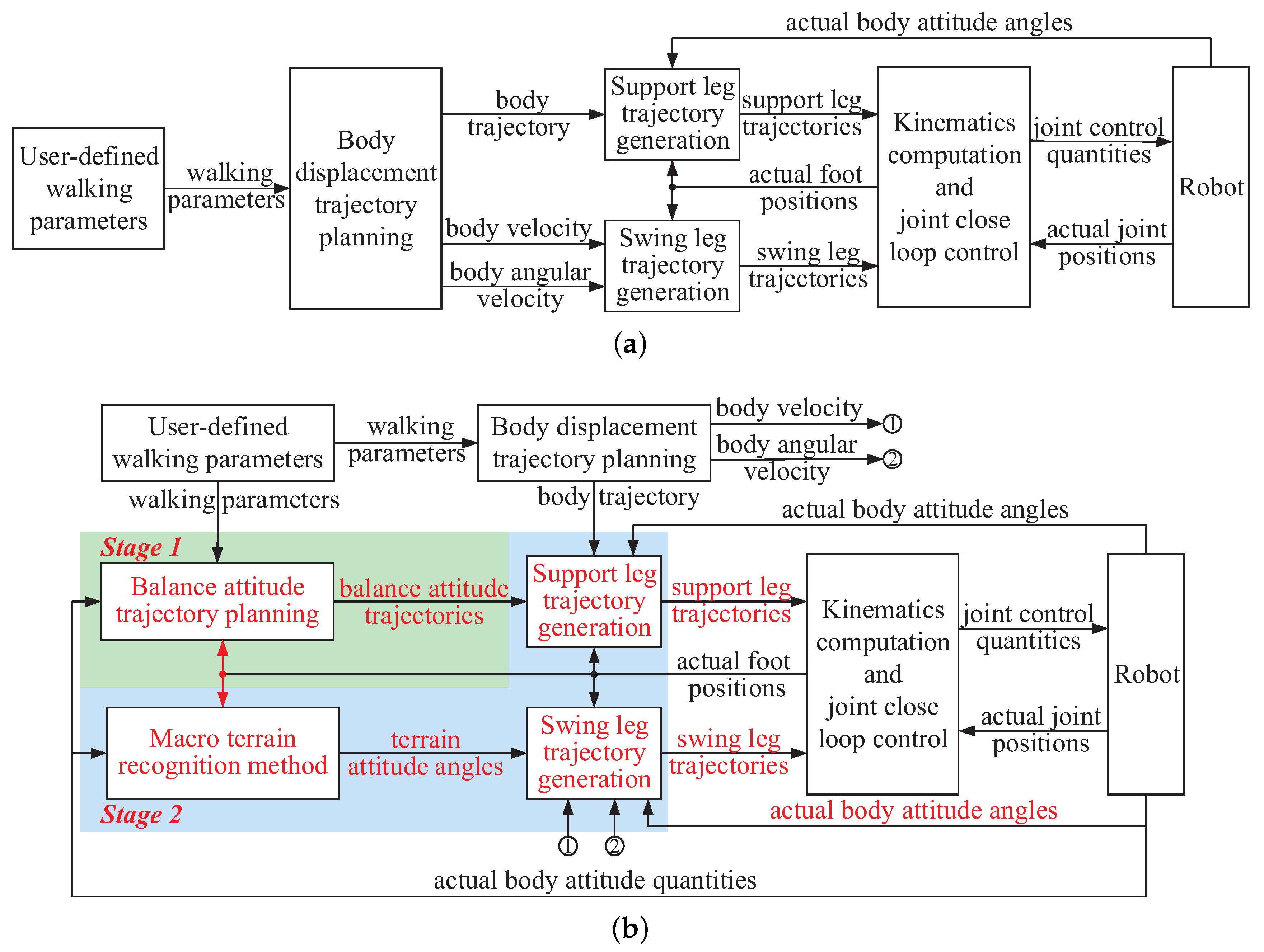
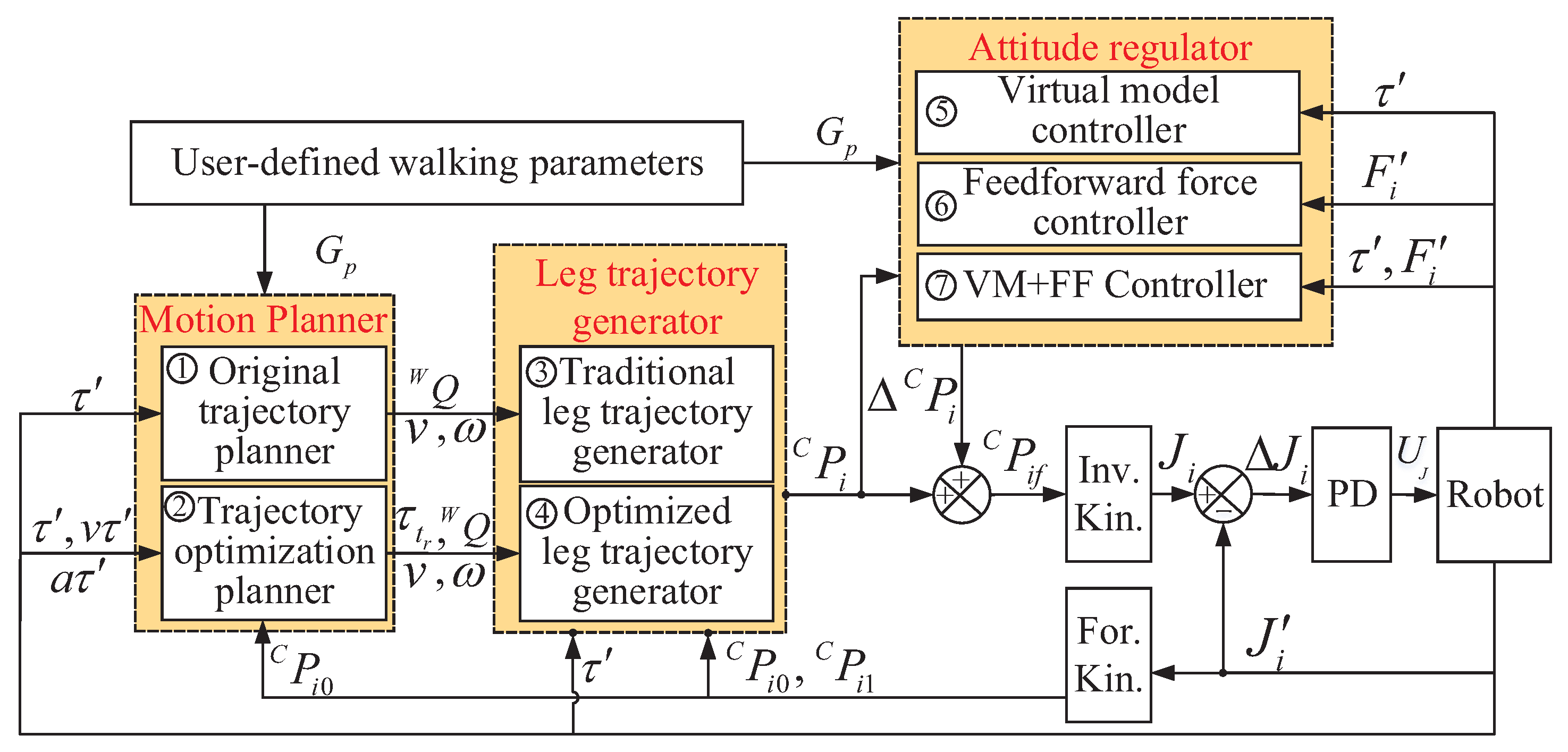
3. Attitude Trajectory Optimization Method to Ensure Balance Hexapod Locomotion
3.1. Stage 1: Balance Attitude Trajectory Planning
3.1.1. Balance Attitude Trajectory Planning via High Order Polynomial Interpolation
3.1.2. Constraints of the Desired Attitude Angle Values and the Deviation Adjustment Time
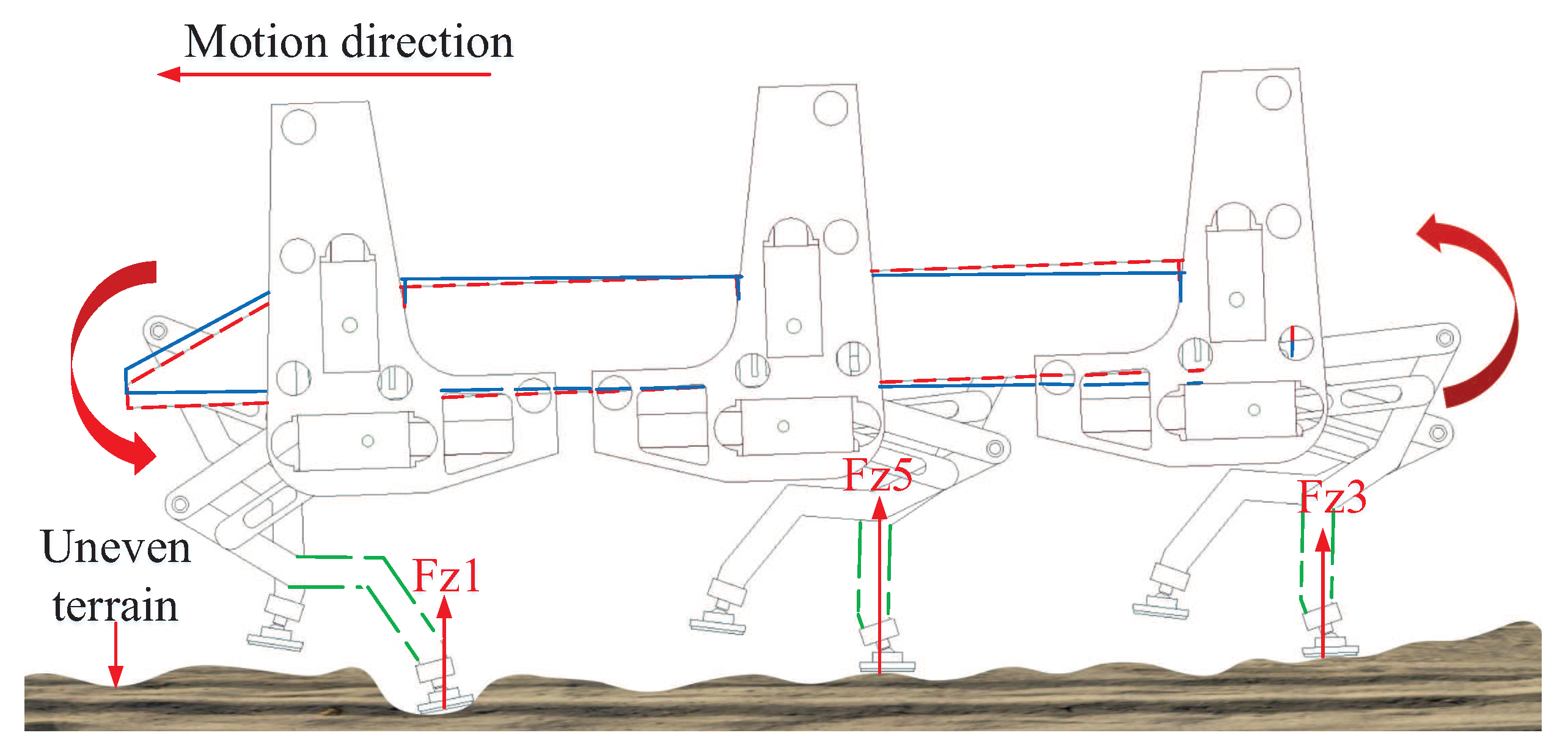
3.2. Stage 2: Leg Trajectory Generation
3.2.1. Swing Leg Trajectory Generation
3.2.2. Support Leg Trajectory Generation
4. Experiments and Result Discussion
4.1. General Introduction of the Experiments
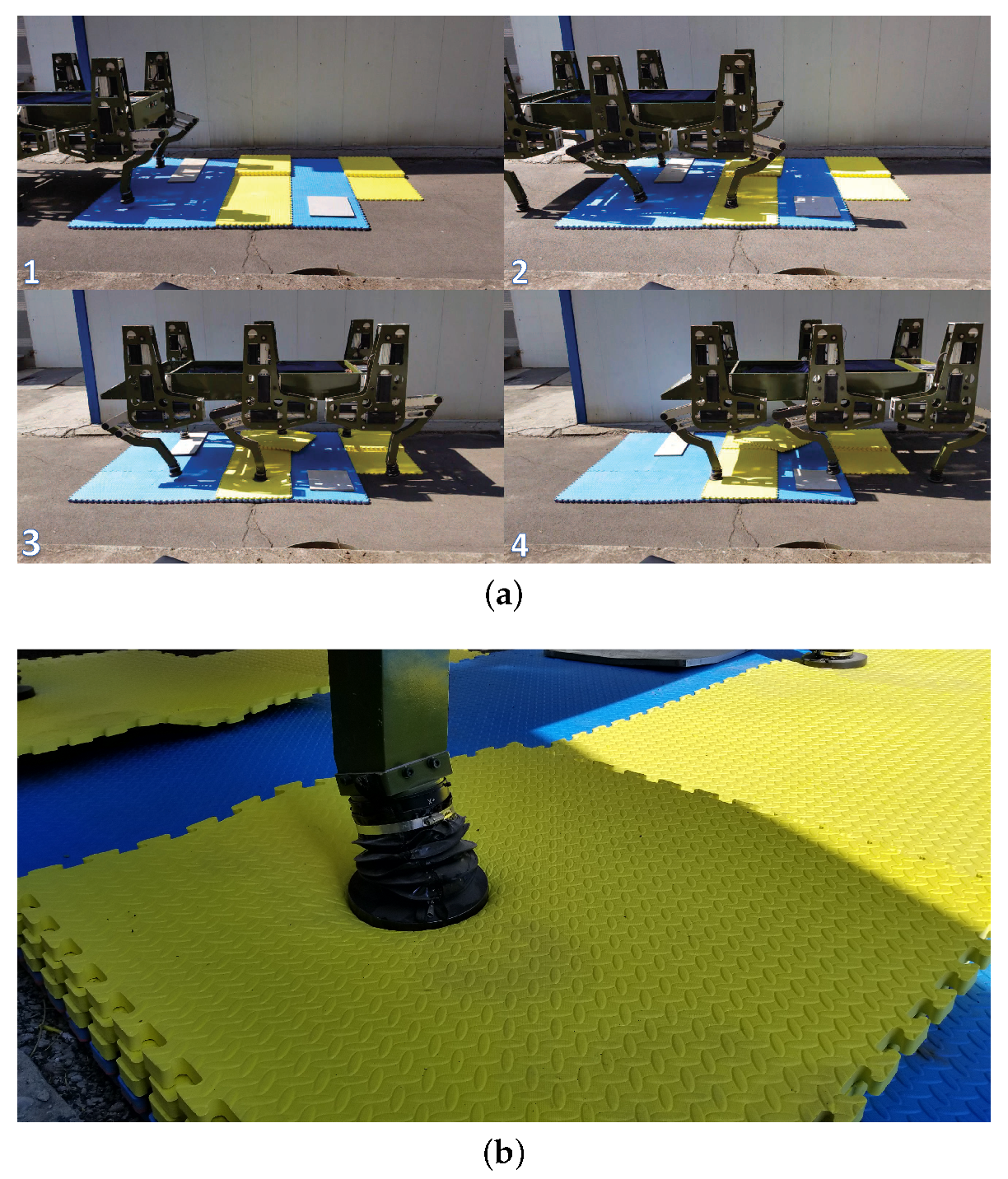
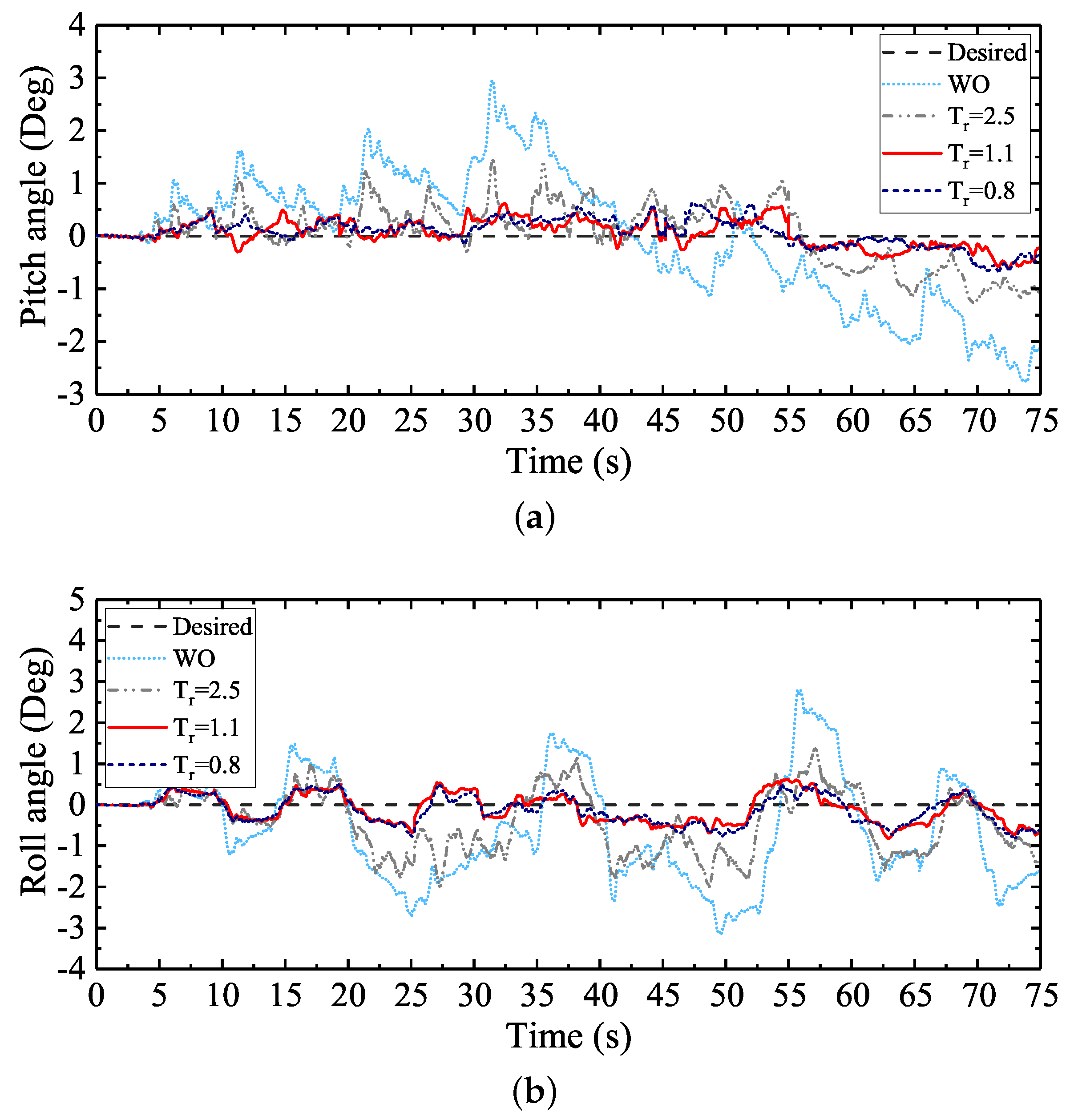
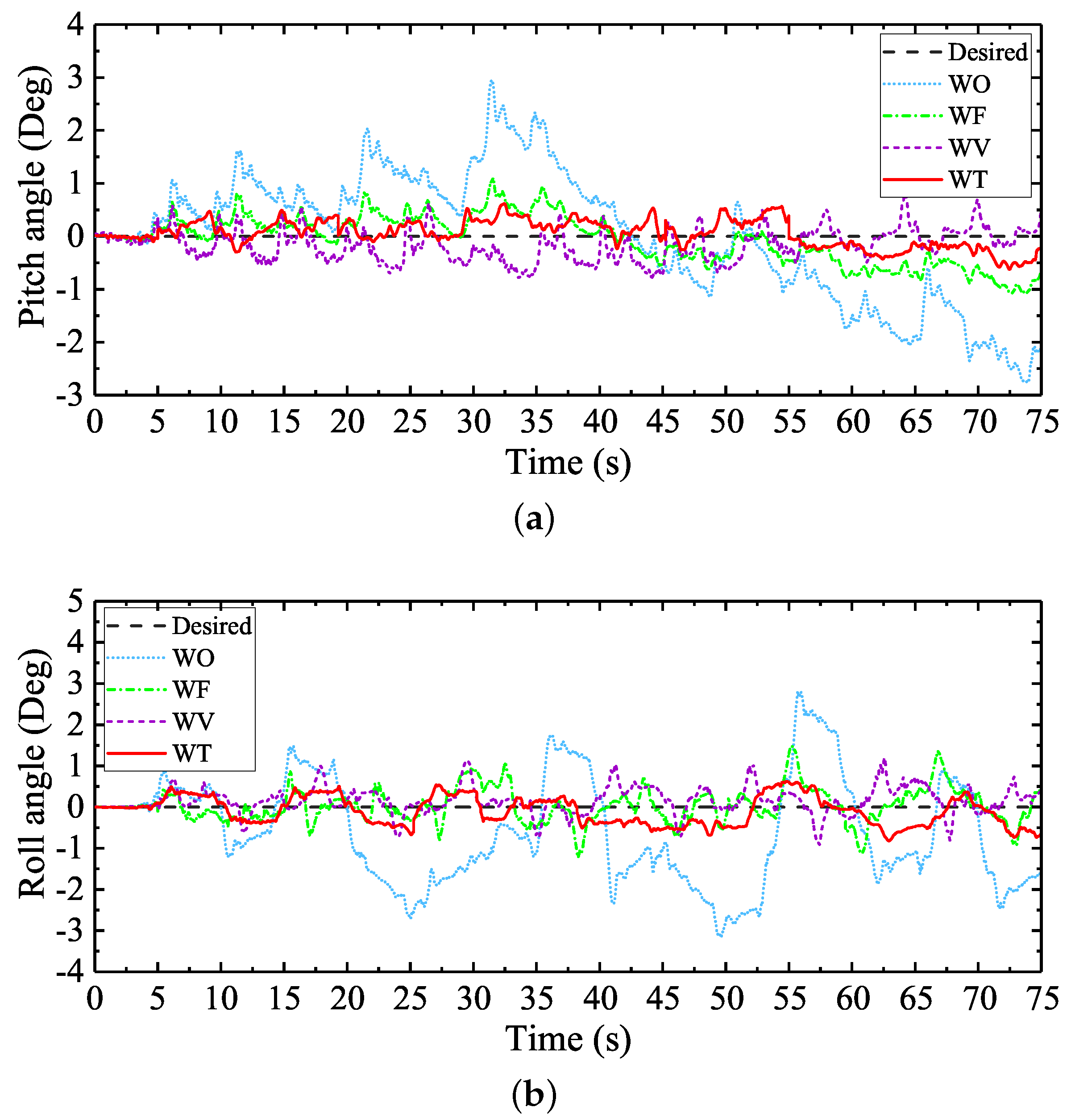
4.2. The Artificial Soft Terrain Walking Experiment
4.3. The Natural Soft Terrain Walking Experiment
5. Conclusions and Further Works
Author Contributions
Funding
Conflicts of Interest
References
- Bing, Z.; Meschede, C.; Chen, G.; Knoll, A.; Huang, K. Indirect and direct training of spiking neural networks for end-to-end control of a lane-keeping vehicle. Neural Netw. 2020, 121, 21–36. [Google Scholar] [CrossRef] [PubMed]
- Bing, Z.; Lemke, C.; Cheng, L.; Huang, K.; Knoll, A. Energy-efficient and damage-recovery slithering gait design for a snake-like robot based on reinforcement learning and inverse reinforcement learning. Neural Netw. 2020, 129, 323–333. [Google Scholar] [CrossRef] [PubMed]
- Bing, Z.; Meschede, C.; Röhrbein, F.; Huang, K.; Knoll, A. A Survey of Robotics Control Based on Learning-Inspired Spiking Neural Networks. Front. Neurorobot. 2018, 12, 35. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnson, A.M.; Hale, M.T.; Haynes, G.C.; Koditschek, D.E. Autonomous legged hill and stairwell ascent. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011. [Google Scholar]
- Bai, L.; Hu, H.; Chen, X.; Sun, Y.; Ma, C.; Zhong, Y. CPG-Based Gait Generation of the Curved-Leg Hexapod Robot with Smooth Gait Transition. Sensors 2019, 19, 3705. [Google Scholar] [CrossRef] [Green Version]
- Semini, C.; Barasuol, V.; Goldsmith, J.; Frigerio, M.; Focchi, M.; Gao, Y.; Caldwell, D.G. Design of the hydraulically actuated, torque-controlled quadruped robot HyQ2Max. IEEE/ASME Trans. Mechatron. 2016, 22, 635–646. [Google Scholar] [CrossRef]
- Gehring, C.; Coros, S.; Hutler, M.; Bellicoso, C.D.; Heijnen, H.; Diethelm, R.; Bloesch, M.; Fankhauser, P.; Hwangbo, J.; Hoepflinger, M.; et al. Practice makes perfect: An optimization-based approach to controlling agile motions for a quadruped robot. IEEE Robot. Autom. Mag. 2016, 23, 34–43. [Google Scholar] [CrossRef] [Green Version]
- Klein, C.A.; Olson, K.W.; Pugh, D.R. Use of force and attitude sensors for locomotion of a legged vehicle over irregular terrain. Int. J. Robot. Res. 1983, 2, 3–17. [Google Scholar] [CrossRef]
- Hodoshima, R.; Doi, T.; Fukuda, Y.; Hirose, S.; Okamoto, T.; Mori, J. Development of a Quadruped Walking Robot TITAN XI for Steep Slope Operation–Step Over Gait to Avoid Concrete Frames on Steep Slopes. J. Robot. Mechatron. 2007, 19, 13–26. [Google Scholar] [CrossRef]
- Irawan, A.; Nonami, K. Compliant walking control for hydraulic driven hexapod robot on rough terrain. J. Robot. Mechatron. 2011, 23, 149–162. [Google Scholar] [CrossRef]
- Zhuang, H.C.; Gao, H.B.; Deng, Z.Q. Gait planning research for an electrically driven large-load-ratio six-legged robot. Appl. Sci. 2017, 7, 296. [Google Scholar] [CrossRef] [Green Version]
- Song, S.; Waldron, K. Machines That Walk: The Adaptive Suspension Vehicle; MIT Press: Cambridge, MA, USA, 1989. [Google Scholar]
- Li, Z.; Ge, Q.; Ye, W.; Yuan, P. Dynamic balance optimization and control of quadruped robot systems with flexible joints. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 1338–1351. [Google Scholar] [CrossRef]
- Jiang, W.Y.; Liu, A.M.; Howard, D. Optimization of legged robot locomotion by control of foot-force distribution. Trans. Inst. Meas. Control. 2004, 26, 311–323. [Google Scholar] [CrossRef]
- Galvez, J.A.; Estremera, J.; De Santos, P.G. A new legged-robot configuration for research in force distribution. Mechatronics 2003, 13, 907–932. [Google Scholar] [CrossRef]
- Moosavian, S.A.A.; Dabiri, A. Dynamics and planning for stable motion of a hexapod robot. In Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, ON, Canada, 6 July 2010; pp. 818–823. [Google Scholar]
- Wang, G.; Ding, L.; Gao, H.; Deng, Z.; Liu, Z.; Yu, H. Minimizing the Energy Consumption for a Hexapod Robot Based on Optimal Force Distribution. IEEE Access 2020, 8, 5393–5406. [Google Scholar] [CrossRef]
- Roy, S.S.; Choudhury, P.S.; Pratihar, D.K. Dynamic modeling of energy efficient hexapod robot’s locomotion over gradient terrains. In Proceedings of the FIRA RoboWorld Congress, Bangalore, India, 15–17 September 2010; pp. 138–145. [Google Scholar]
- Mahapatra, A.; Roy, S.S.; Bhavanibhatla, K.; Pratihar, D.K. Energy-efficient inverse dynamic model of a Hexapod robot. In Proceedings of the 2015 International Conference on Robotics, Automation, Control and Embedded Systems (RACE), Chennai, India, 18 February 2015; pp. 1–7. [Google Scholar]
- Zapolsky, S.; Drumwright, E. Quadratic programming-based inverse dynamics control for legged robots with sticking and slipping frictional contacts. In Proceedings of the IEEE/RSJ International Conference of Intelligent Robots and Systems, Chicago, IL, USA, 14 September 2014; pp. 3266–3271. [Google Scholar]
- Liu, Y.; Ding, L.; Gao, H.; Liu, G.; Yu, H. Efficient force distribution algorithm for hexapod robot walking on uneven terrain. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3 December 2016; pp. 432–437. [Google Scholar]
- Roy, S.S.; Pratihar, D.K. Dynamic modeling of energy efficient crab walking of hexapod robot. Appl. Mech. Mater. 2011, 110, 2730–2739. [Google Scholar] [CrossRef]
- Chen, C.; Guo, W.; Zheng, P.; Zha, F.; Wang, X.; Jiang, Z. Stable Motion Control Scheme Based on Foot-Force Distribution for a Large-Scale Hexapod Robot. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3 July 2019; pp. 763–768. [Google Scholar]
- Hutter, M.; Sommer, H.; Gehring, C.; Hoepflinger, M.; Bloesch, M.; Siegwart, R. Quadrupedal locomotion using hierarchical operational space control. Int. J. Robot. Res. 2014, 33, 1047–1062. [Google Scholar] [CrossRef] [Green Version]
- Yoneda, K.; Iiyama, H.; Hirose, S. Sky-Hook Suspension Control of a Quadruped Walking Vehicle. J. Robot. Soc. Jpn. 1994, 12, 1066–1071. [Google Scholar] [CrossRef]
- Huang, Q.; Fukuhara, Y.; Chen, X. Posture and vibration control based on virtual suspension model using sliding mode control for six-legged walking robot. J. Syst. Des. Dyn. 2007, 1, 180–191. [Google Scholar] [CrossRef] [Green Version]
- Huang, Q. Softly Stable Walk Using Phased Compliance Control with Virtual Force for Multi-Legged Walking Robot. Climbing Walk. Robot. 2010, 1, 333. [Google Scholar]
- Wang, P.F.; Li, M.T.; Sun, L.N. Body Posture Control of Wheeled Foot Quadruped Robot Based on Virtual Suspension Model. In Proceedings of the International Conference on Intelligent Robotics and Applications, Wuhan, China, 15–17 October 2008; pp. 834–843. [Google Scholar]
- Shi, Y.; Wang, P.; Wang, X.; Zha, F.; Jiang, Z.; Guo, W.; Li, M. Bio-inspired equilibrium point control scheme for quadrupedal locomotion. IEEE Trans. Cogn. Dev. Syst. 2018, 11, 200–209. [Google Scholar]
- Gao, H.; Liu, Y.; Ding, L.; Liu, G.; Yu, H. Low impact force and energy consumption motion planning for hexapod robot with passive compliant ankles. J. Intell. Robot. Syst. 2019, 94, 349–370. [Google Scholar] [CrossRef]
- Deng, H.; Xin, G.; Zhong, G.; Mistry, M. Gait and trajectory rolling planning and control of hexapod robots for disaster rescue applications. Robot. Auton. Syst. 2017, 95, 13–24. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.; Zhang, S.; Zhang, H.; Li, X.; Zhou, H.; Fu, Y. Leg Trajectory Planning for Quadruped Robots with High-Speed Trot Gait. Appl. Sci. 2019, 9, 1508. [Google Scholar] [CrossRef] [Green Version]
- Erden, M.S. Optimal Protraction of a Biologically Inspired Robot Leg. J. Intell. Robot. Syst. 2011, 64, 301–322. [Google Scholar] [CrossRef]
- Garcia, E.; Gonzalez-De-Santos, P. Using Soft Computing Techniques for Improving Foot Trajectories in Walking Machines. J. Robot. Syst. 2010, 18, 343–356. [Google Scholar] [CrossRef] [Green Version]
- Zha, F.; Chen, C.; Guo, W.; Zheng, P.; Shi, J. A free gait controller designed for a heavy load hexapod robot. Adv. Mech. Eng. 2019, 11, 1687814019838369. [Google Scholar] [CrossRef]
- Dong, Y.; Guo, W.; Zha, F.; Liu, Y.; Chen, C.; Sun, L. A Vision-Based Two-Stage Framework for Inferring Physical Properties of the Terrain. Appl. Sci. 2020, 10, 6473. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Quantity |
|---|---|
| The general symbol used to represent the user-defined robot walking parameters, | |
| including the gait parameters, desired attitude angles, etc | |
| The general symbol used to represent the actual attitude angles of the robot | |
| The general symbol used to represent the actual attitude angle velocities of the robot | |
| The general symbol representing the actual attitude angle accelerations of the robot | |
| The actual foot force vector of leg i | |
| The actual joint position vector of leg i | |
| The joint position deviation | |
| The control quantity of the joint motor | |
| The foot position compensation value of leg i | |
| The final desired foot position of leg i |
| Parameter | Quantity | Value |
|---|---|---|
| Step length | 550 mm | |
| Step length | 0 mm | |
| Steering angle | 0 degree | |
| T | Cycle time | 10 s |
| Duty factor | 0.5 | |
| h | Step height | 200 mm |
| Experiment Group | Pitch Angle (Deg) | Roll Angle (Deg) | ||
|---|---|---|---|---|
| Max. Abs. TE | Std. Deviation | Max. Abs. TE | Std. Deviation | |
| WO | 2.945 | 1.234 | 3.158 | 1.298 |
| = 2.5 s | 1.448 | 0.567 | 2.020 | 0.760 |
| = 1.1 s | 0.623 | 0.259 | 0.821 | 0.310 |
| = 0.8 s | 0.671 | 0.261 | 0.819 | 0.333 |
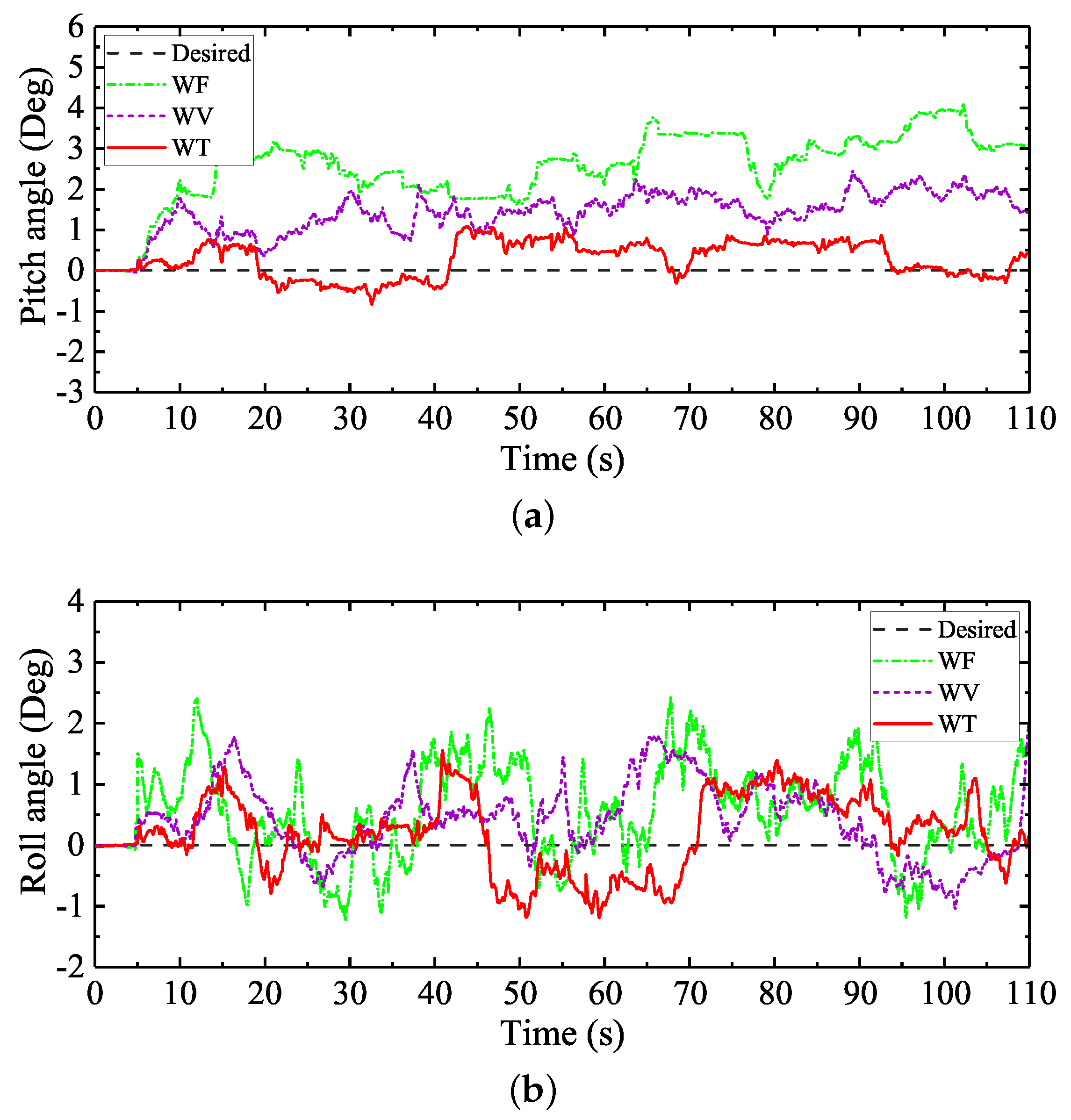
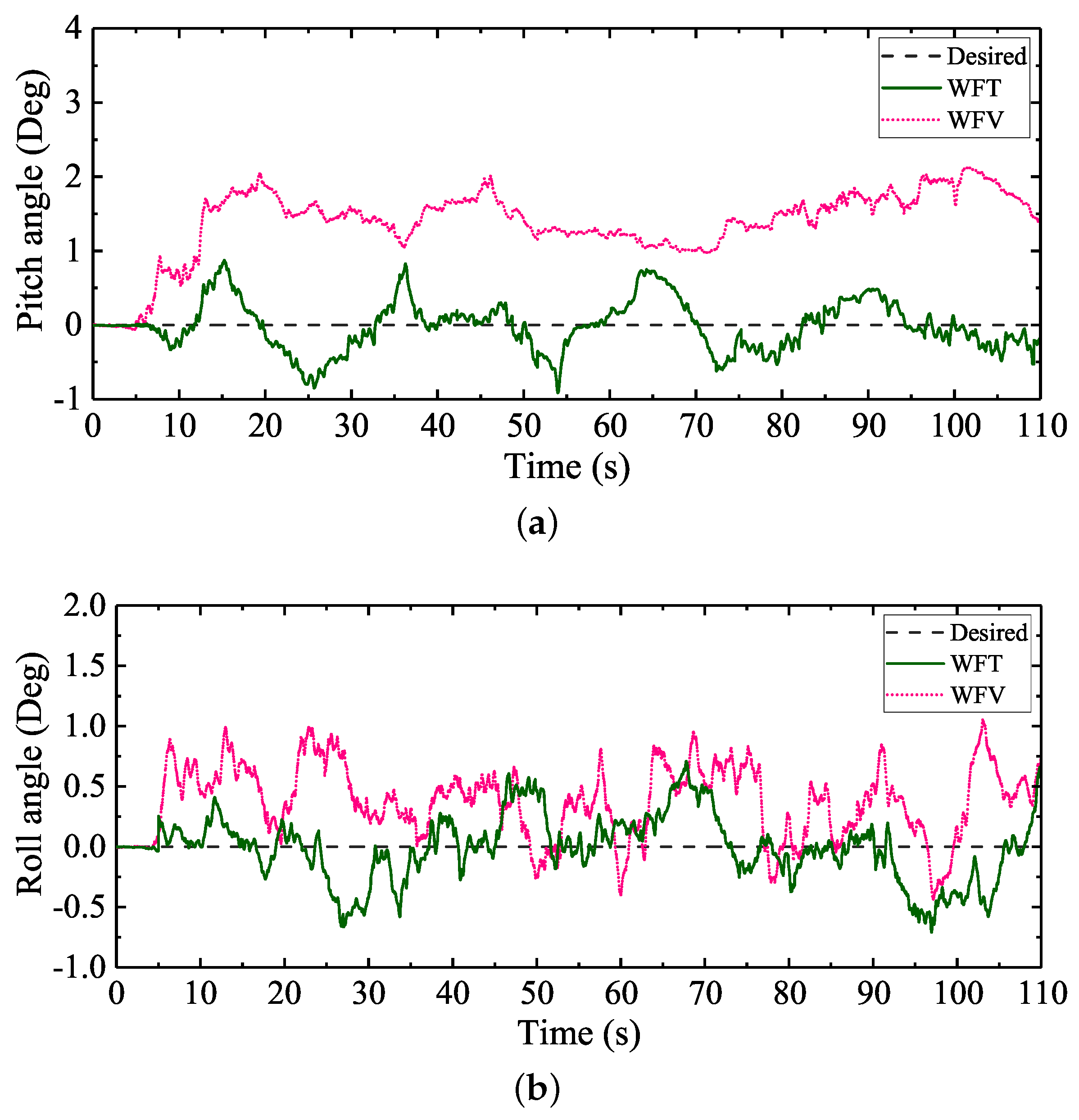
| Experiment Group | Pitch Angle (Deg) | Roll Angle (Deg) | ||
|---|---|---|---|---|
| Max. Abs. TE | Std. Deviation | Max. Abs. TE | Std. Deviation | |
| WO | 2.945 | 1.234 | 3.158 | 1.298 |
| WF | 1.085 | 0.464 | 1.470 | 0.418 |
| WV | 0.818 | 0.300 | 1.197 | 0.325 |
| WT | 0.623 | 0.259 | 0.821 | 0.310 |
| WFV | 0.604 | 0.249 | 0.680 | 0.203 |
| WFT | 0.515 | 0.169 | 0.672 | 0.202 |
| Parameter | Quantity | Value |
|---|---|---|
| Step length | 350 mm | |
| Step length | 0 mm | |
| Steering angle | 0 degree | |
| T | Cycle time | 10 s |
| Duty factor | 0.5 | |
| h | Step height | 150 mm |
| Experiment Group | Pitch Angle (Deg) | Roll Angle (Deg) | ||
|---|---|---|---|---|
| Max. Abs. TE | Std. Deviation | Max. Abs. TE | Std. Deviation | |
| WF | 4.127 | 0.872 | 2.430 | 0.769 |
| WV | 2.448 | 0.523 | 2.086 | 0.610 |
| WT | 1.078 | 0.436 | 1.552 | 0.607 |
| WFV | 2.128 | 0.472 | 1.056 | 0.303 |
| WFT | 0.914 | 0.336 | 0.710 | 0.273 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Guo, W.; Wang, P.; Sun, L.; Zha, F.; Shi, J.; Li, M. Attitude Trajectory Optimization to Ensure Balance Hexapod Locomotion. Sensors 2020, 20, 6295. https://doi.org/10.3390/s20216295
Chen C, Guo W, Wang P, Sun L, Zha F, Shi J, Li M. Attitude Trajectory Optimization to Ensure Balance Hexapod Locomotion. Sensors. 2020; 20(21):6295. https://doi.org/10.3390/s20216295
Chicago/Turabian StyleChen, Chen, Wei Guo, Pengfei Wang, Lining Sun, Fusheng Zha, Junyi Shi, and Mantian Li. 2020. "Attitude Trajectory Optimization to Ensure Balance Hexapod Locomotion" Sensors 20, no. 21: 6295. https://doi.org/10.3390/s20216295
APA StyleChen, C., Guo, W., Wang, P., Sun, L., Zha, F., Shi, J., & Li, M. (2020). Attitude Trajectory Optimization to Ensure Balance Hexapod Locomotion. Sensors, 20(21), 6295. https://doi.org/10.3390/s20216295