Functional Evaluation of a Force Sensor-Controlled Upper-Limb Power-Assisted Exoskeleton with High Backdrivability


Abstract
:1. Introduction
2. Design of the Exoskeleton
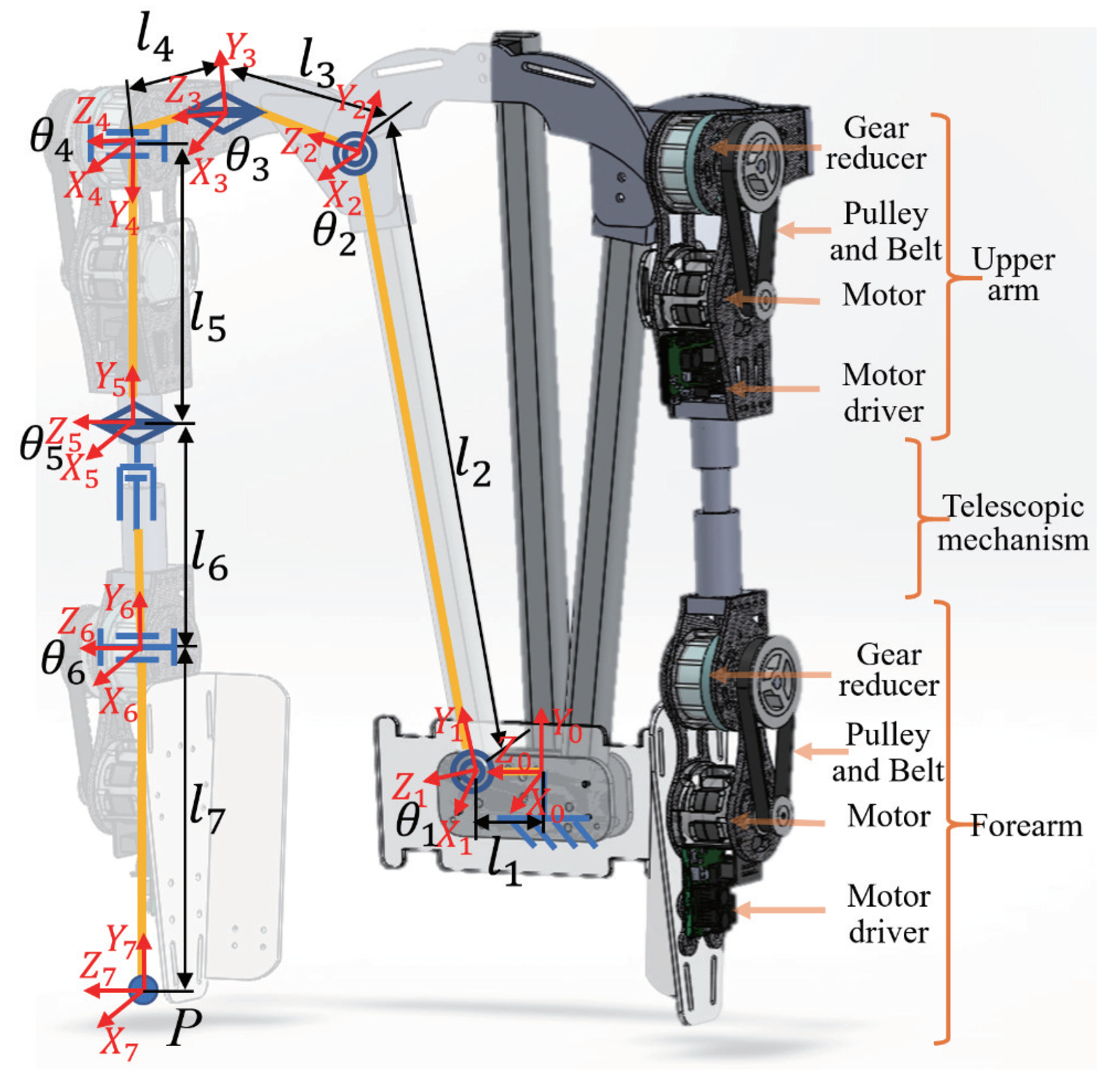
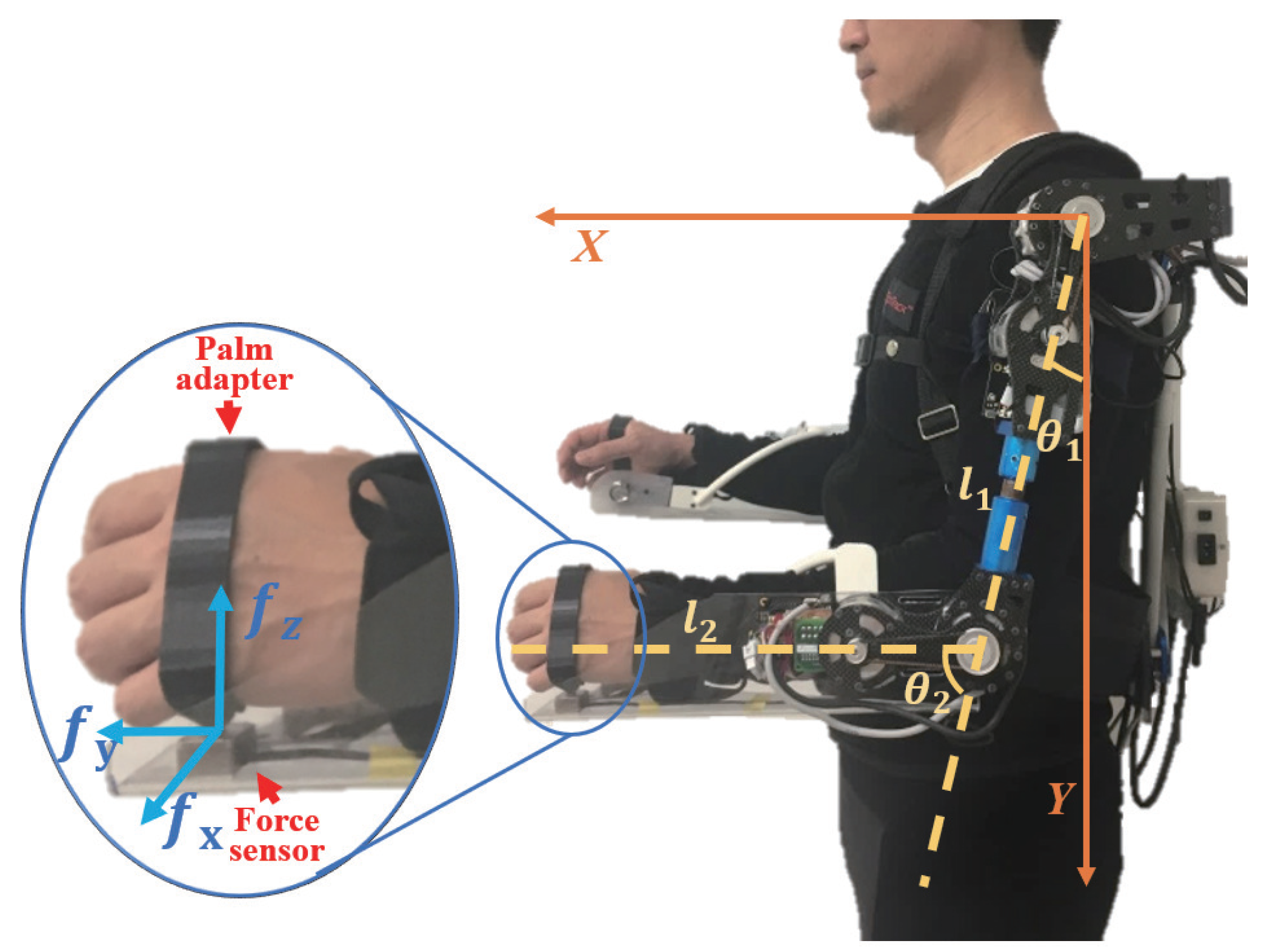
2.1. Structural Design of the Exoskeleton
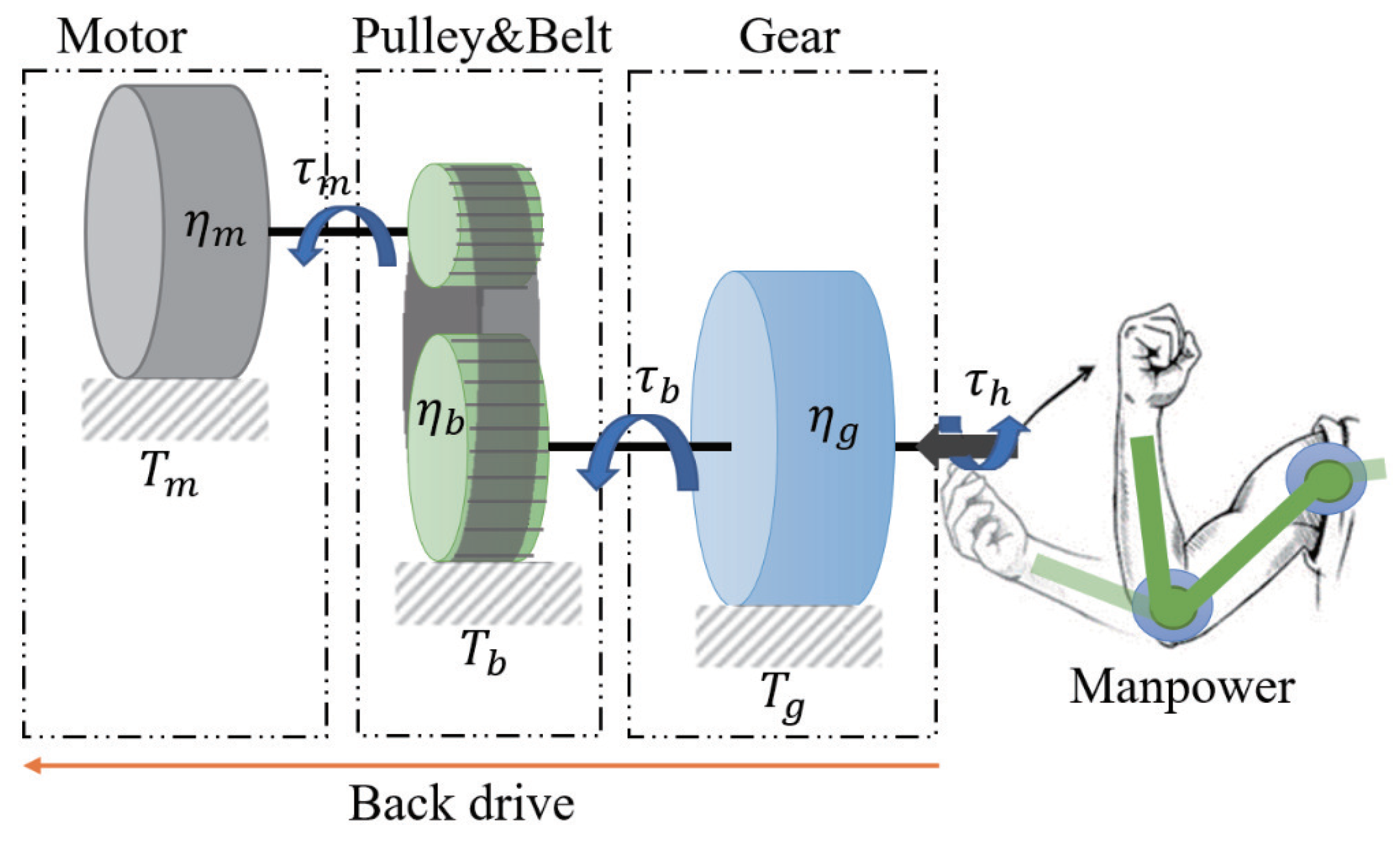
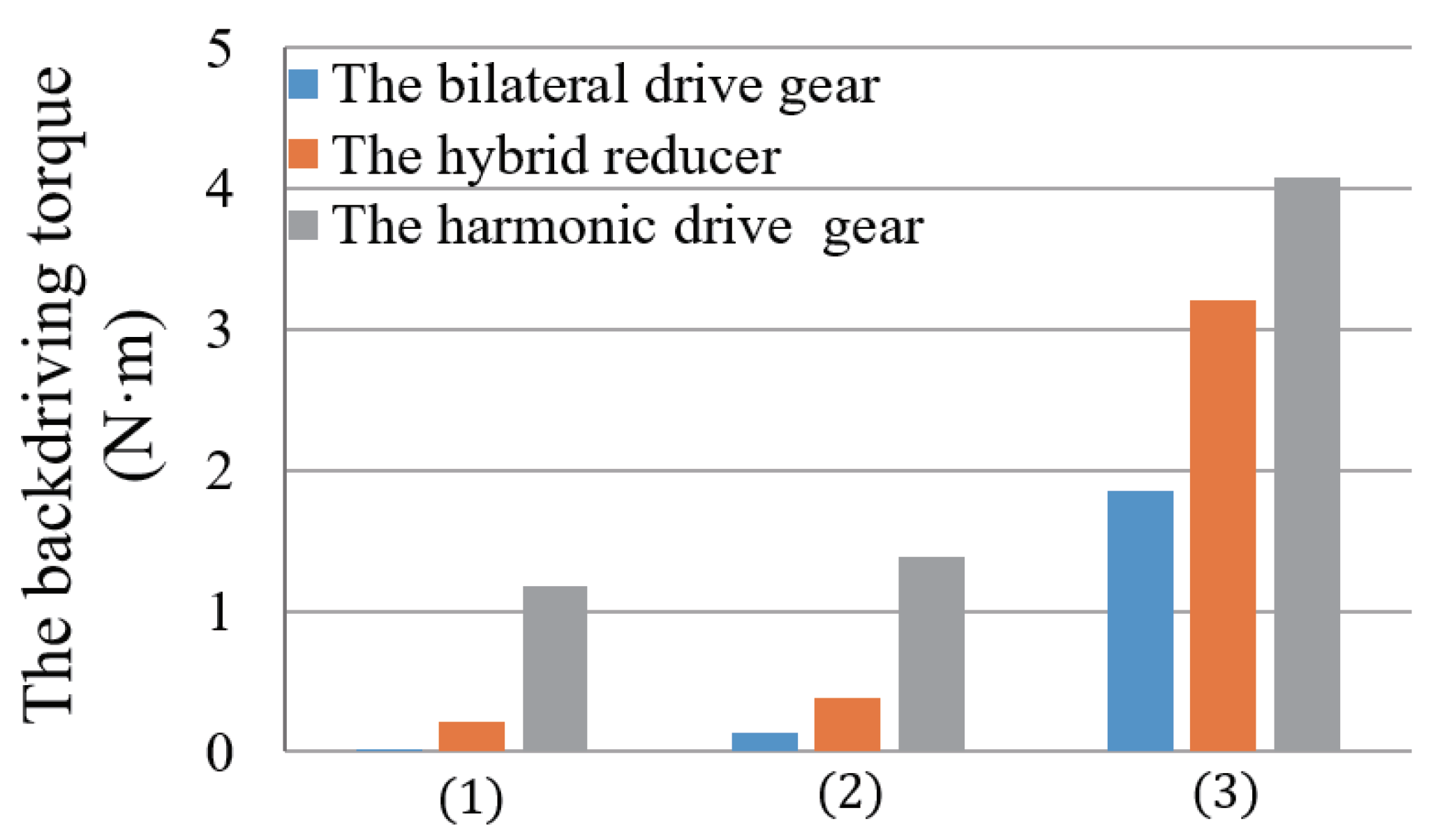
2.2. Design of Active Joints with Backdrivability
- (1)
- The gear reducer only ().
- (2)
- The gear reducer and the timing-belt pulley ().
- (3)
- The gear reducer, timing-belt pulley, and motor, that is, the entire active joint ().
3. Workspace of the Exoskeleton
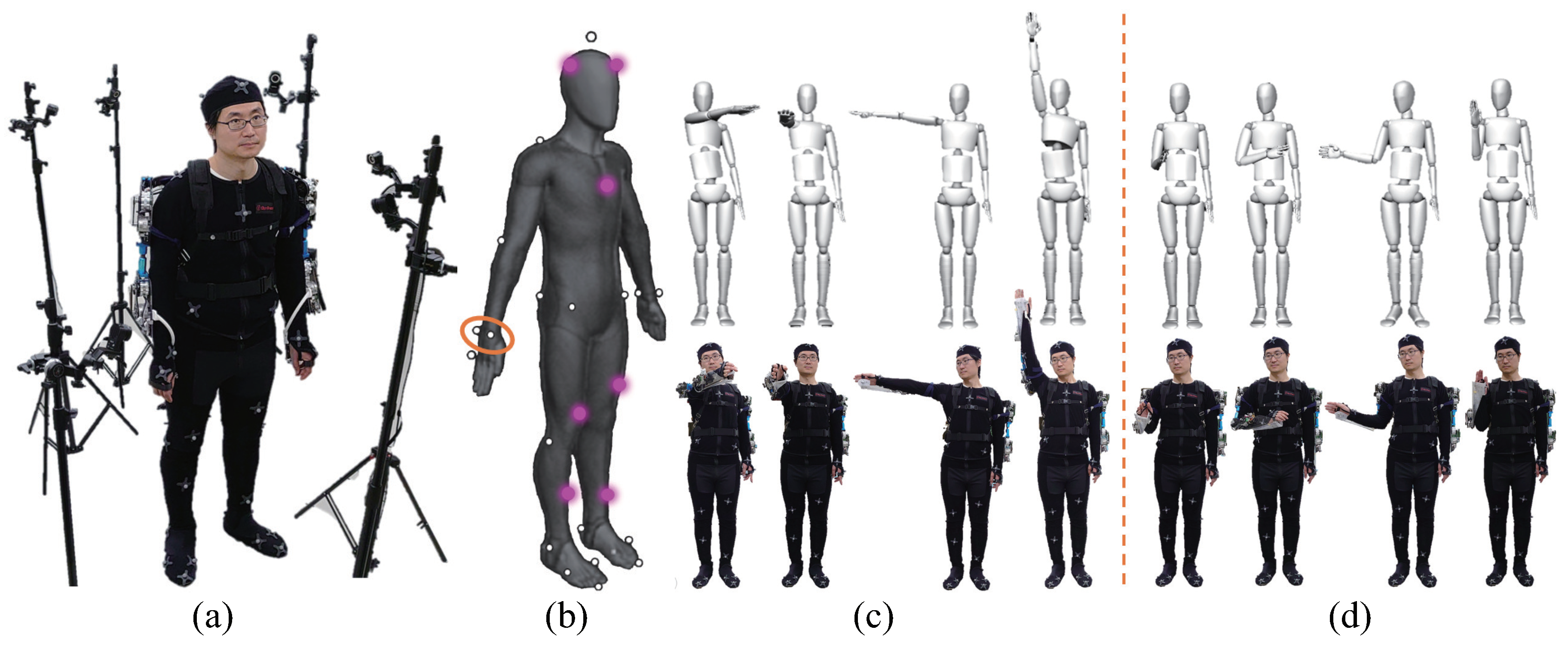
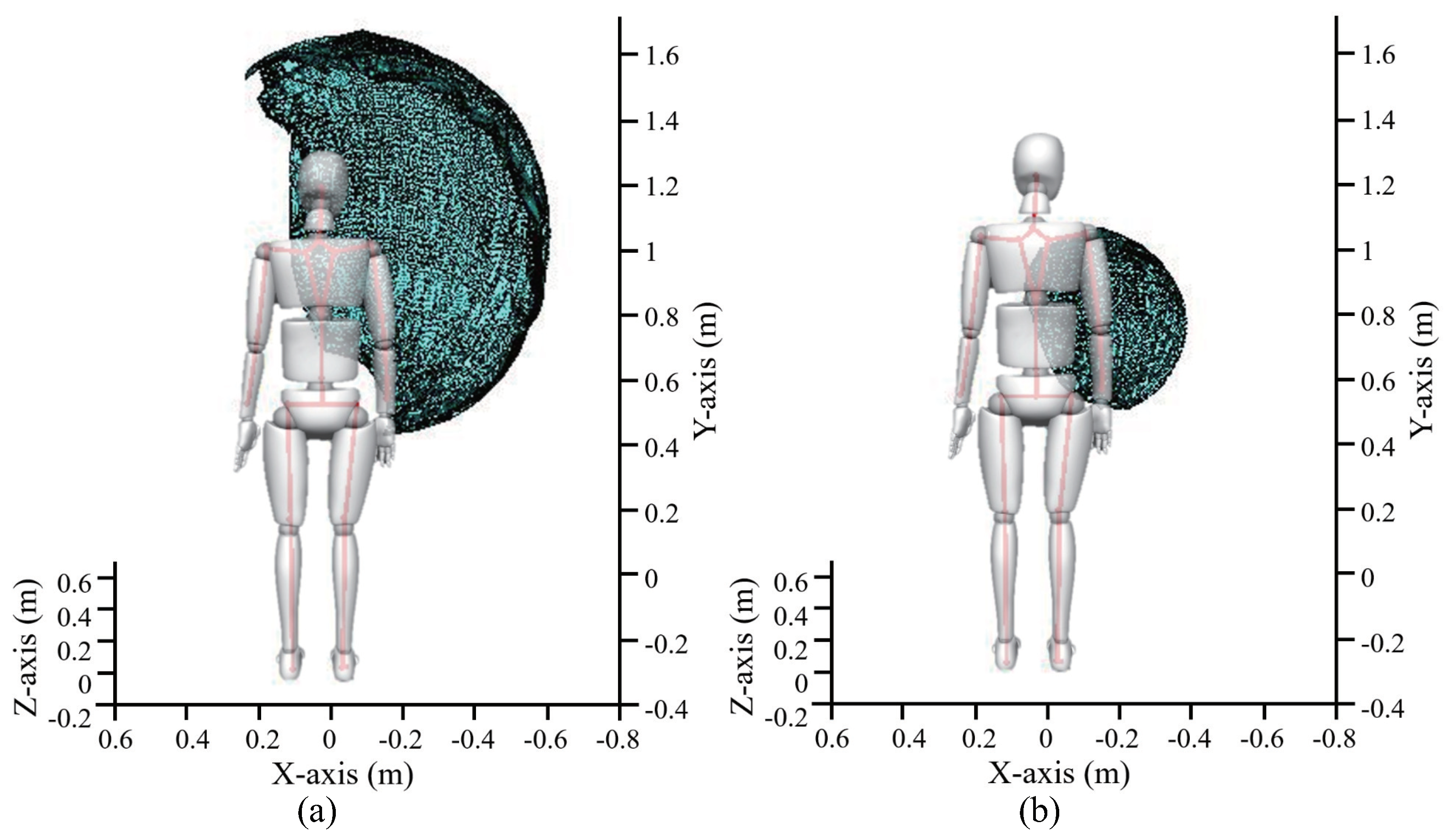
3.1. Measurement of the Exoskeleton’s Workspace
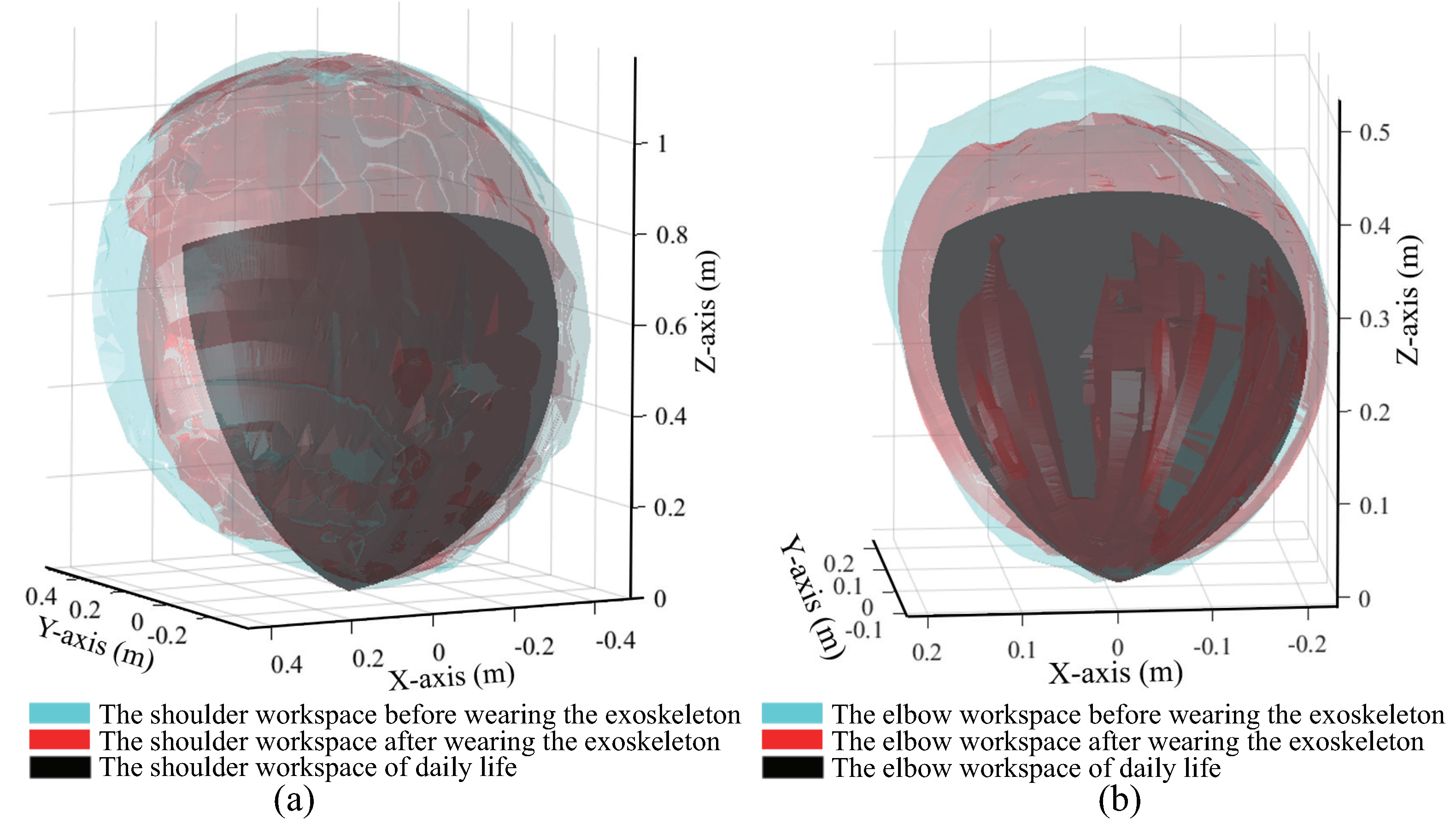
3.2. Evaluating the Exoskeleton’s Workspace
3.2.1. Comparison of the Workspace before and after the Exoskeleton Was Worn
3.2.2. Comparison with the Workspace Required for Daily Life
4. Evaluation of the Power Assistance of the Exoskeleton during Object Carrying Tasks
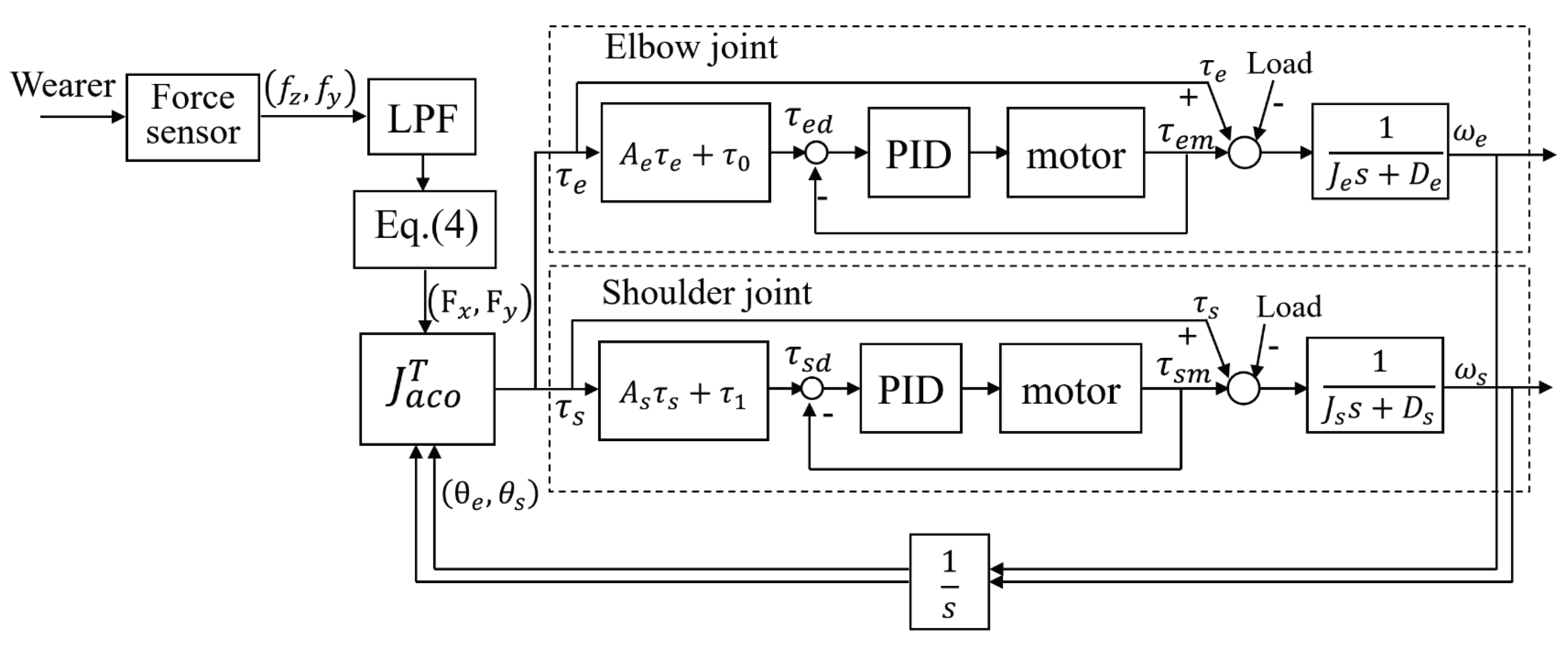
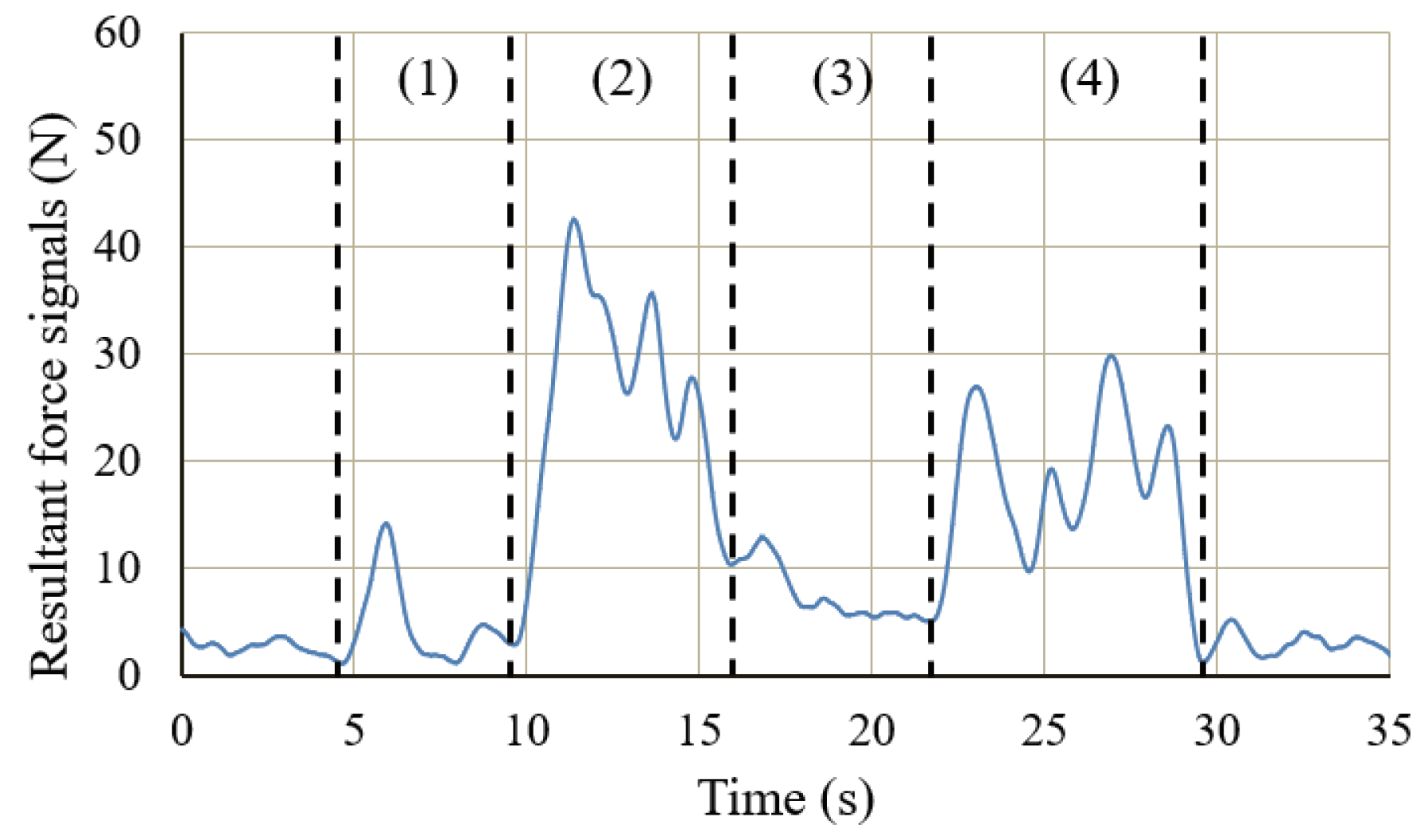
4.1. Control Method
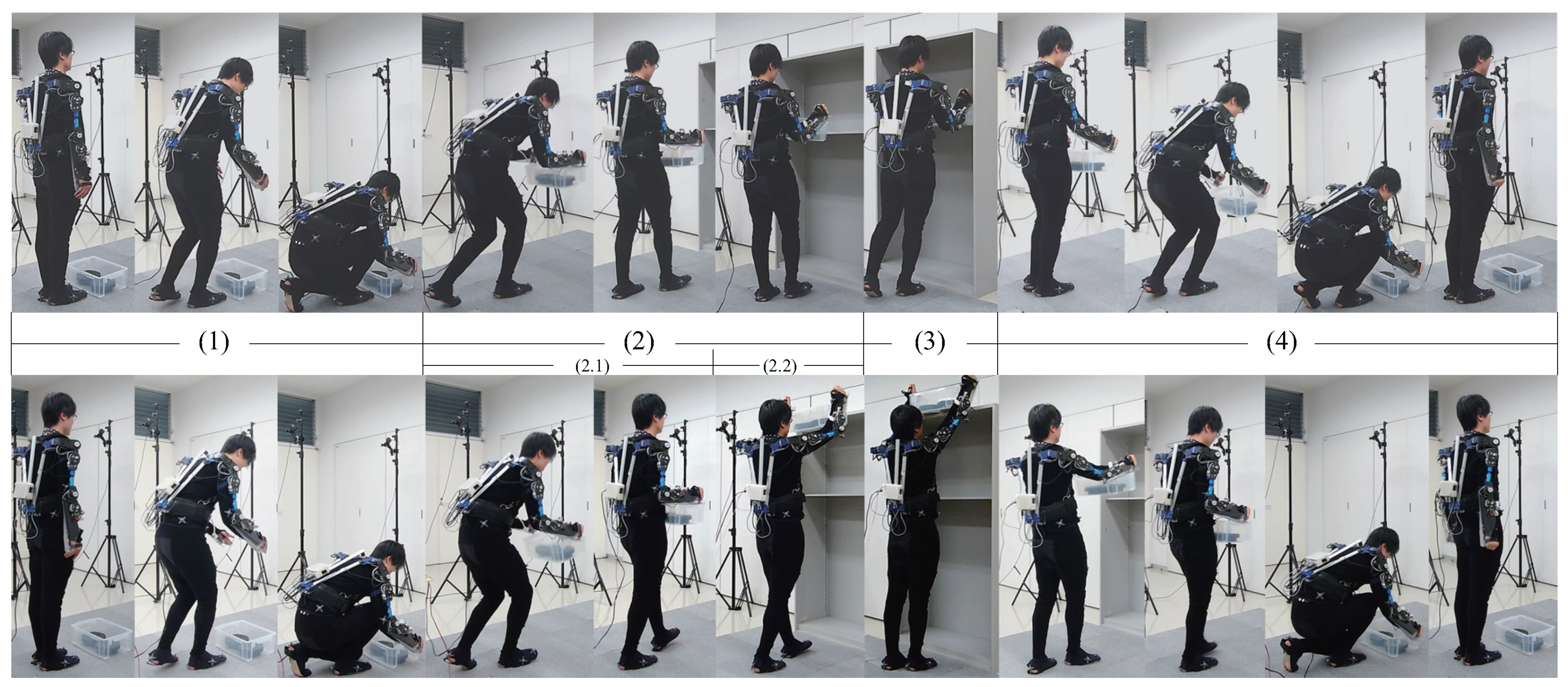
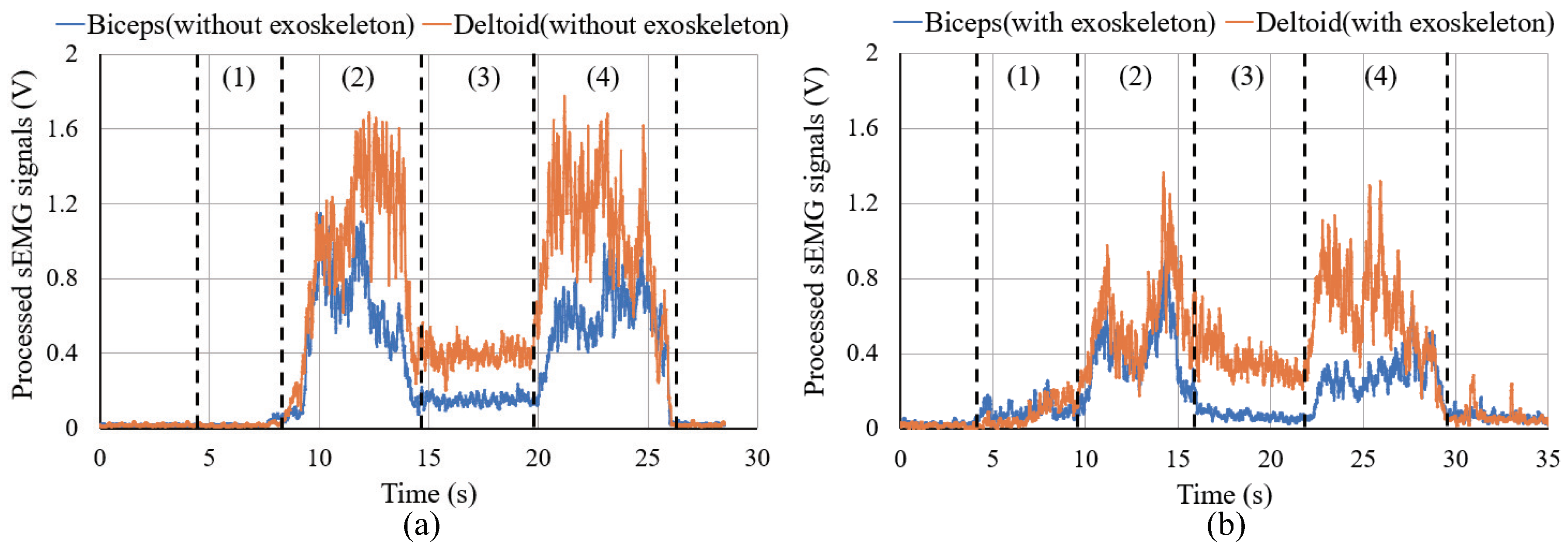
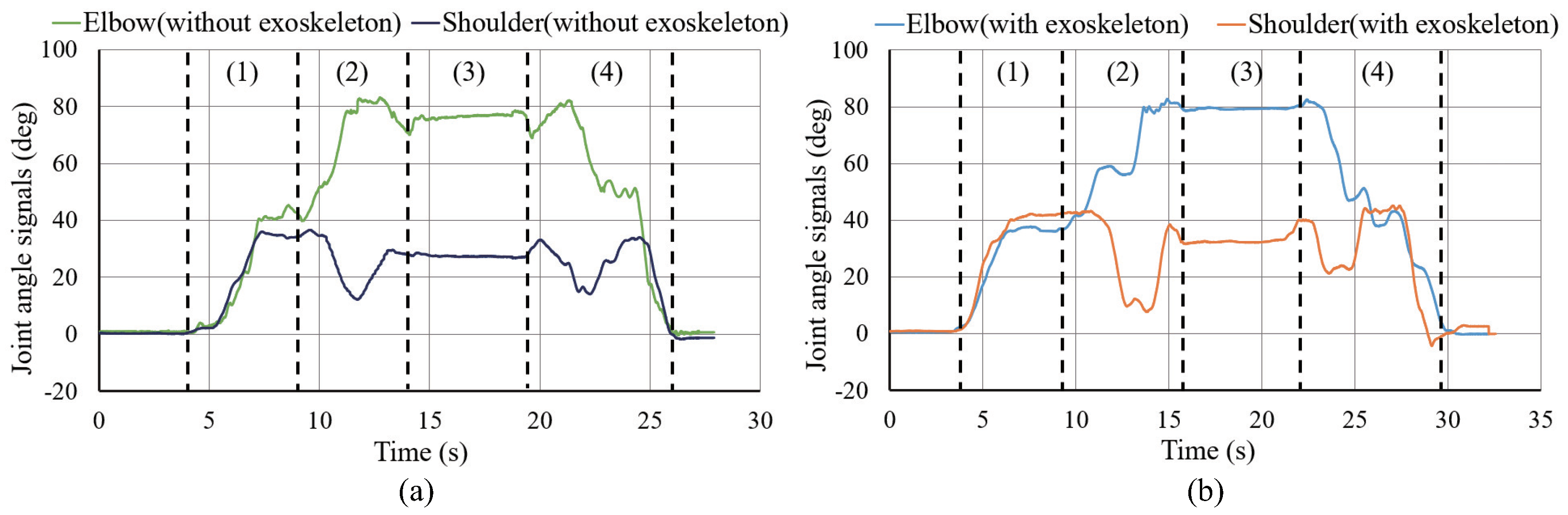
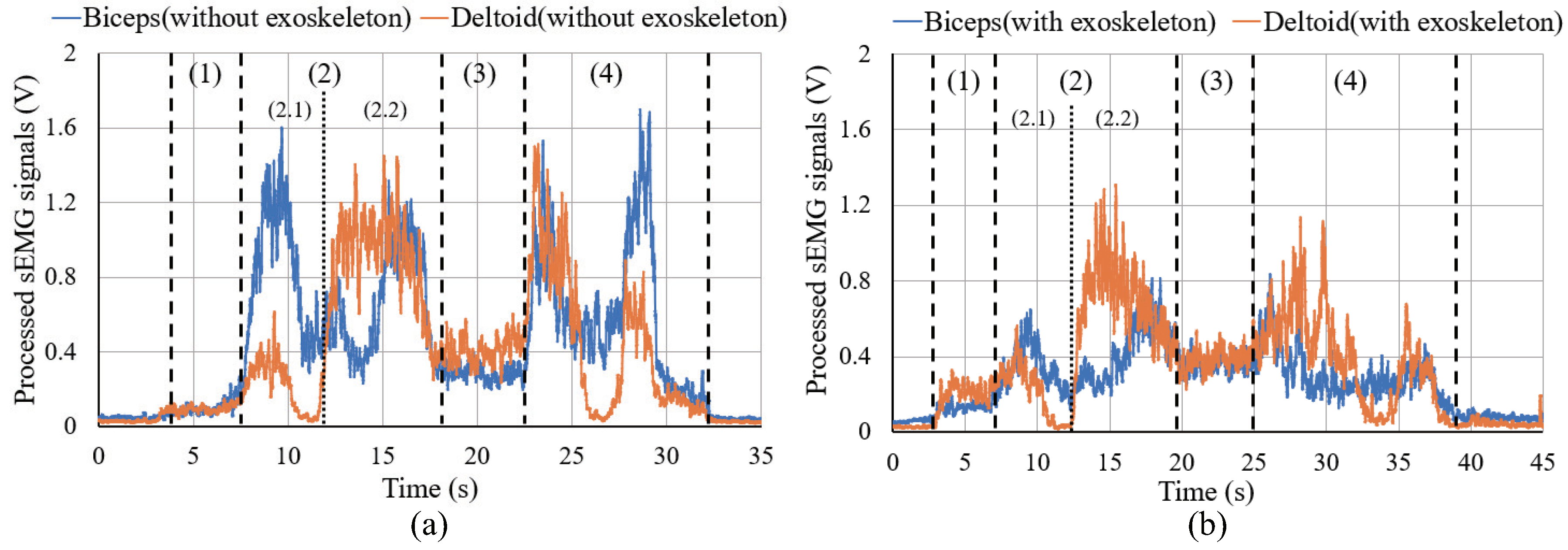
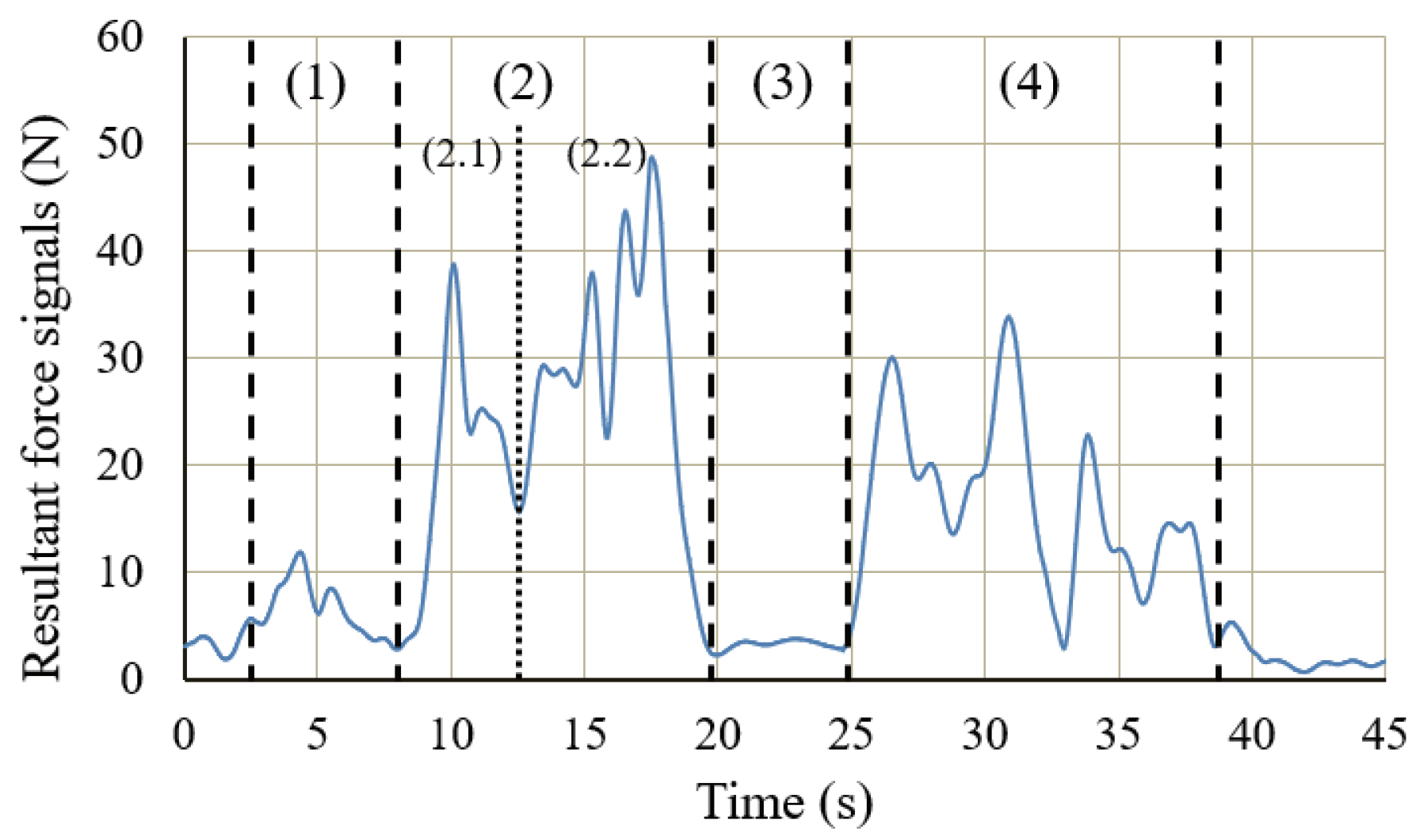
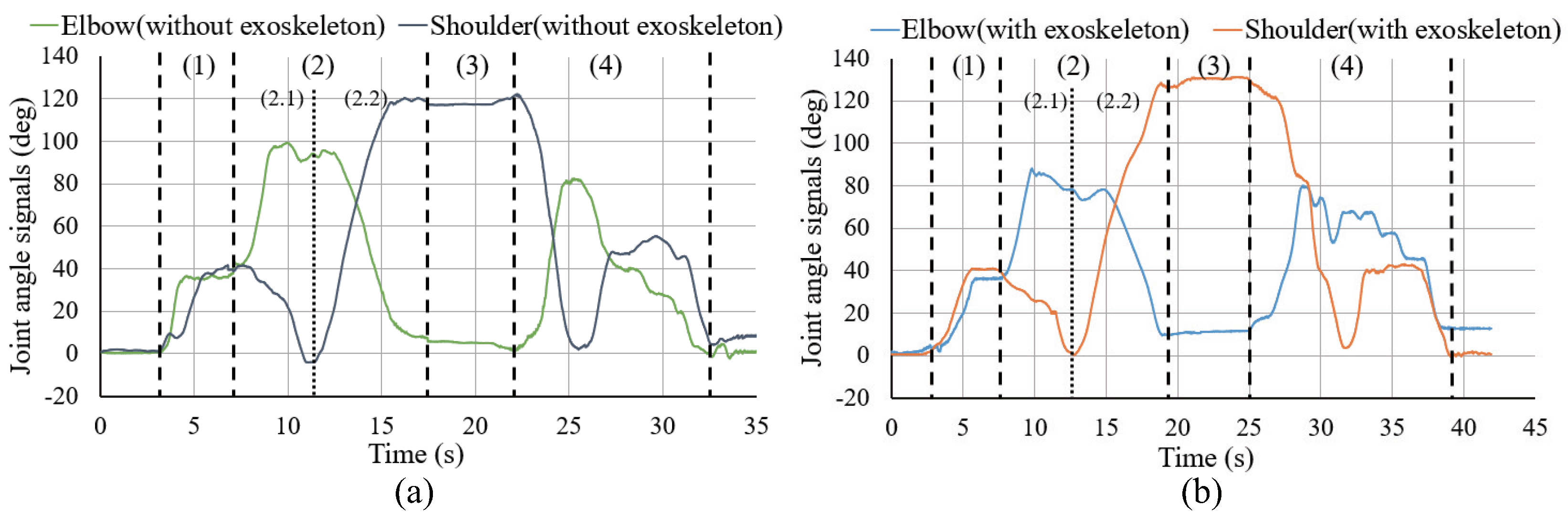
4.2. Experiment of Carrying a Heavy Object to the 1.2 m High
- (1)
- Bending over to pick up the heavy object (stage (1) in Figure 9).
- (2)
- Lifting the heavy object, standing up, and approaching the shelf (stage (2) in Figure 9).
- (3)
- Placing the heavy object on the 1.2 m high (stage (3) in Figure 9).
- (4)
- Lifting the heavy object, backing up, bending over, and placing it back on the ground (stage (4) in Figure 9).
4.3. Experiment of Carrying a Heavy Object to the 1.8 m High
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DOF | Degrees of freedom |
| sEMG | Surface electromyography |
| FSRs | Force-sensitive resistors |
| BLDC | Brushless direct current |
| 3D | Three-dimensional |
References
- Gull, M.A.; Bai, S.; Bak, T. A Review on Design of Upper Limb Exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef] [Green Version]
- Wang, A.; Kim, S. Directional efficiency in geared transmissions: Characterization of backdrivability towards improved proprioceptive control. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, MA, USA, 25–30 May 2015; pp. 1055–1062. [Google Scholar]
- Gopura, R.A.R.C.; Kiguchi, K.; Bandara, D.S.V. A brief review on upper extremity robotic exoskeleton systems. In Proceedings of the 6th International Conference on Industrial and Information Systems (ICIIS), Kandy, Sri Lanka, 16–19 August 2011; pp. 346–351. [Google Scholar]
- Yu, S.; Huang, T.H.; Yang, X.; Jiao, C.; Yang, J.; Chen, Y.; Yi, J.; Su, H. Quasi-Direct Drive Actuation for a Lightweight Hip Exoskeleton with High Backdrivability and High Bandwidth. IEEE/ASME Trans. Mechatron. 2020, 25, 1794–1802. [Google Scholar] [CrossRef]
- Nagymate, G.; Kiss, R.M. Application of OptiTrack motion capture systems in human movement analysis: A systematic literature review. Recent Innov. Mechatron. 2018, 5, 1–9. [Google Scholar]
- Delgado, P.; Alekhya, S.; Majidirad, A.; Hakansson, N.A.; Desai, J.; Yihun, Y. Shoulder Kinematics Assessment towards Exoskeleton Development. Appl. Sci. 2020, 10, 6336. [Google Scholar] [CrossRef]
- Perry, J.C.; Rosen, J.; Burns, S. Upper-Limb Powered Exoskeleton Design. IEEE/ASME Trans. Mechatron. 2007, 12, 408–417. [Google Scholar] [CrossRef]
- Sui, D.; Fan, J.; Jin, H. Design of a wearable upper-limb exoskeleton for activities assistance of daily living. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 26–30 June 2017; pp. 845–850. [Google Scholar]
- Ergin, M.A.; Patoglu, V. ASSISTON-SE: A self-aligning shoulder-elbow exoskeleton. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St. Paul, MN, USA, 14–19 May 2012; pp. 2479–2485. [Google Scholar]
- Kiguchi, K.; Hayashi, Y. An EMG-Based Control for an Upper-Limb Power-Assist Exoskeleton Robot. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2010, 42, 1064–1071. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Wang, B.; Sun, F.; Yang, C. sEMG-based joint force control for an upper-limb power-assist exoskeleton robot. IEEE J. Biomed. Health Inform. 2014, 18, 1043–1050. [Google Scholar]
- Rosen, J.; Brand, M.; Fuchs, M.B.; Arcan, M. A myosignal-based powered exoskeleton system. IEEE Trans. Syst. Part A Syst. Humans 2001, 31, 210–222. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.H.; Luna, C.O.; Saad, M. EMG Based Control of a Robotic Exoskeleton for Shoulder and Elbow Motion Assist. J. Autom. Control Eng. 2015, 3, 270–276. [Google Scholar] [CrossRef]
- Roman, R.C.; Precup, R.E.; Petriu, E.M. Hybrid Data-Driven Fuzzy Active Disturbance Rejection Control for Tower Crane Systems. Eur. J. Control 2020. [Google Scholar] [CrossRef]
- Zhu, Z.; Pan, Y.; Zhou, Q.; Lu, C. Event-Triggered Adaptive Fuzzy Control for Stochastic Nonlinear Systems with Unmeasured States and Unknown Backlash-Like Hysteresis. IEEE Trans. Fuzzy Syst. 2020. [Google Scholar] [CrossRef]
- Bai, S.; Christensen, S.; Islam, M.R.U. An upper-body exoskeleton with a novel shoulder mechanism for assistive applications. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Munich, Germany, 26–30 June 2017; pp. 1041–1046. [Google Scholar]
- Huang, J.; Huo, W.; Mohammed, S. Control of Upper-Limb Power-Assist Exoskeleton Using A Human-Robot Interface Based on Motion Intention Recognition. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1–14. [Google Scholar] [CrossRef]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Design and development of an exoskeletal wrist prototype via pneumatic artificial muscles. Soft Mechatron. 2015, 50, 2709–2730. [Google Scholar]
- Desplenter, T.; Zhou, Y.; Edmonds, B.P.R.; Lidka, M.; Goldman, A.; Trejos, A.L. Rehabilitative and assistive wearable mechatronic upper-limb devices: A review. J. Rehabil. Assist. 2020, 1–26. [Google Scholar] [CrossRef] [PubMed]
- Hessinger, M.; Pingsmann, M.; Perry, J.C.; Werthschützky, R.; Kupnik, M. Hybrid position/force control of an upper-limb exoskeleton for assisted drilling. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 1824–1829. [Google Scholar]
- Tajima, A. Assessment of energy expenditure: An association between heart rate and oxygen uptake in daily physical activity. Int. J. Anal. Bio-Sci. 2014, 2, 135–142. [Google Scholar]
- Chen, C.; Zhang, Y.; Li, Y.; Wang, Z.; Liu, Y.; Cao, W.; Wu, X. Iterative Learning Control for a Soft Exoskeleton with Hip and Knee Joint Assistance. Sensor 2020, 20, 4333. [Google Scholar] [CrossRef] [PubMed]
- Fuentes del Toro, S.; Santos-Cuadros, S.; Olmeda, E.; Álvarez-Caldas, C.; Díaz, V.; San Román, J.L. Is the Use of a Low-Cost sEMG Sensor Valid to Measure Muscle Fatigue? Sensors 2019, 19, 3204. [Google Scholar] [CrossRef] [Green Version]
- Blanco, A.; Catalán, J.M.; Díez, J.A.; García, J.V.; Lobato, E.; García-Aracil, N. Electromyography Assessment of the Assistance Provided by an Upper-Limb Exoskeleton in Maintenance Tasks. Sensors 2019, 19, 3391. [Google Scholar] [CrossRef] [Green Version]
- Ishida, T.; Takanishi, A. A Robot Actuator Development with High Backdrivability. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Bangkok, Thailand, 25–28 June 2006; pp. 1–6. [Google Scholar]
- Matsuki, H.; Nagano, K.; Fujimoto, Y. Bilateral Drive Gear—A Highly Backdrivable Reduction Gearbox for Robotic Actuators. IEEE/ASME Trans. Mechatron. 2019, 24, 2661–2673. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 3rd ed.; Pearson/Prentice Hall: London, UK, 2005; pp. 27–69. [Google Scholar]
- Kouchi, M.; Mochimaru, M. 2006: Japanese 3D Body Shape and Dimensions Data 2003; H18PRO-503; National Institute of Advanced Industrial Science and Technology: Tokyo, Japan, 2003. [Google Scholar]
- Piña-Martínez, E.; Roberts, R.; Leal-Merlo, S.; Rodriguez-Leal, E. Vision SystemBased Design and Assessment of a Novel Shoulder Joint Mechanism for an Enhanced Workspace Upper Limb Exoskeleton. Appl. Bionics Biomech. 2018, 2018, 6019381. [Google Scholar] [CrossRef]
- Gates, D.H.; Walters, L.S.; Cowley, J.; Wilken, J.M. Range of Motion Requirements for Upper-Limb Activities of Daily Living. Am. J. Occup. Ther. 2016, 70, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Neumann, D.A. Kinesiology of the Musculoskeletal System: Foundations for Physical Rehabilitation; Mosby: Philadelphia, PA, USA; St. Louis, MO, USA, 2002; pp. 99–185. [Google Scholar]
- Yu, S.; Huang, T.; Wang, D.; Lynn, B.; Sayd, D.; Silivanov, V.; Park, S.Y.; Tian, Y.; Su, H. Design and Control of a High-Torque and Highly Backdrivable Hybrid Soft Exoskeleton for Knee Injury Prevention During Squatting. IEEE Robot. Autom. Lett. 2019, 4, 4579–4586. [Google Scholar] [CrossRef]
- Lv, G.; Zhu, H.; Gregg, R.D. On the Design and Control of Highly Backdrivable Lower-Limb Exoskeletons: A Discussion of Past and Ongoing Work. IEEE Control Syst. 2018, 38, 88–113. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Doan, J.; Stence, C.; Lv, G.; Elery, T.; Gregg, R. Design and validation of a torque dense, highly backdrivable powered knee-ankle orthosis. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 504–510. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | Length (m) | Joint | Rotation Range |
|---|---|---|---|
| 0.05 | to | ||
| 0.40 | to | ||
| 0.09 | to | ||
| 0.09 | to | ||
| 0.15 | to | ||
| 0.10 to 0.25 | to | ||
| 0.25 |
| Subject | Arm Length (m) | Workspace without Exoskeleton (m) | Workspace with Exoskeleton (m) | Coverage (%) |
|---|---|---|---|---|
| A | 0.56 | 1.33 | 1.14 | 85.7 |
| B | 0.54 | 1.30 | 1.09 | 83.8 |
| C | 0.60 | 1.69 | 1.57 | 92.9 |
| D | 0.61 | 1.91 | 1.59 | 83.2 |
| Subject | Forearm Length (m) | Workspace without Exoskeleton (m) | Workspace with Exoskeleton (m) | Coverage (%) |
|---|---|---|---|---|
| A | 0.25 | 0.24 | 0.22 | 91.7 |
| B | 0.23 | 0.21 | 0.18 | 85.7 |
| C | 0.27 | 0.25 | 0.23 | 92.0 |
| D | 0.28 | 0.27 | 0.24 | 88.9 |
| Subject | Action | Status | (V) | (N) | |
|---|---|---|---|---|---|
| Biceps | Deltoid | Right-Hand | |||
| A | Lifting | without exoskeleton | 0.60 | 1.01 | - |
| with exoskeleton | 0.38 | 0.59 | 24.2 | ||
| Lowering | without exoskeleton | 0.57 | 1.00 | - | |
| with exoskeleton | 0.32 | 0.60 | 17.4 | ||
| B | Lifting | without exoskeleton | 0.59 | 0.78 | - |
| with exoskeleton | 0.35 | 0.39 | 24.7 | ||
| Lowering | without exoskeleton | 0.53 | 0.68 | - | |
| with exoskeleton | 0.28 | 0.45 | 13.6 | ||
| C | Lifting | without exoskeleton | 0.63 | 0.71 | - |
| with exoskeleton | 0.42 | 0.42 | 23.6 | ||
| Lowering | without exoskeleton | 0.53 | 0.72 | - | |
| with exoskeleton | 0.30 | 0.46 | 15.8 | ||
| Subject | Action | Status | (V) | (N) | |
|---|---|---|---|---|---|
| Biceps | Deltoid | Right-Hand | |||
| A | Lifting | without exoskeleton | 0.59 | 0.72 | - |
| with exoskeleton | 0.37 | 0.46 | 25.0 | ||
| Lowering | without exoskeleton | 0.45 | 0.61 | - | |
| with exoskeleton | 0.31 | 0.40 | 16.5 | ||
| B | Lifting | without exoskeleton | 0.43 | 0.59 | - |
| with exoskeleton | 0.33 | 0.30 | 24.9 | ||
| Lowering | without exoskeleton | 0.35 | 0.54 | - | |
| with exoskeleton | 0.24 | 0.26 | 17.5 | ||
| C | Lifting | without exoskeleton | 0.57 | 0.95 | - |
| with exoskeleton | 0.44 | 0.42 | 23.7 | ||
| Lowering | without exoskeleton | 0.48 | 0.74 | - | |
| with exoskeleton | 0.35 | 0.36 | 16.0 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Liang, H.; Ueda, N.; Li, P.; Fujimoto, Y.; Zhu, C. Functional Evaluation of a Force Sensor-Controlled Upper-Limb Power-Assisted Exoskeleton with High Backdrivability. Sensors 2020, 20, 6379. https://doi.org/10.3390/s20216379
Liu C, Liang H, Ueda N, Li P, Fujimoto Y, Zhu C. Functional Evaluation of a Force Sensor-Controlled Upper-Limb Power-Assisted Exoskeleton with High Backdrivability. Sensors. 2020; 20(21):6379. https://doi.org/10.3390/s20216379
Chicago/Turabian StyleLiu, Chang, Hongbo Liang, Naoya Ueda, Peirang Li, Yasutaka Fujimoto, and Chi Zhu. 2020. "Functional Evaluation of a Force Sensor-Controlled Upper-Limb Power-Assisted Exoskeleton with High Backdrivability" Sensors 20, no. 21: 6379. https://doi.org/10.3390/s20216379
APA StyleLiu, C., Liang, H., Ueda, N., Li, P., Fujimoto, Y., & Zhu, C. (2020). Functional Evaluation of a Force Sensor-Controlled Upper-Limb Power-Assisted Exoskeleton with High Backdrivability. Sensors, 20(21), 6379. https://doi.org/10.3390/s20216379