1. Introduction
Use of wearable accelerometers has become increasingly common in studies of physical activity, aging, and obesity [
1,
2,
3,
4,
5,
6,
7,
8]. Self-reported measures, such as questionnaires, have been widely used to assess physical activity (PA) previously [
6,
9]. One reason why we care about using accelerometry over self-reporting is because there are some populations whose self-reported measures can be inaccurate [
10]. One such population is older adults. Questionnaires require individuals to recall their daily activities, which can be extremely difficult, particularly for older individuals [
11]. Schrack et al. [
12] showed there are changes in the daily patterns and amount of PA as people age. Accelerometry is also an important tool that can be applied to the general population, because walking is the most popular form of aerobic physical activity [
13].
Accelerometers offer a non-invasive and objective alternative to self-reporting methods. Advancements in data processing allow for the analysis of specific gait characteristics, such as cadence and asymmetry [
14]. Likewise, advancements in statistical methodology for analysis of high dimensional data have opened up new paths for analyzing more complex and potentially more informative summaries of accelerometry data. Accelerometers are electro-mechanical devices that measure acceleration along three orthogonal axes. They are often worn on a person’s waist or wrist, and they provide high frequency, high-throughput data represented by three time series of acceleration measurements [
15,
16]. The data are typically collected at the sub-second level (usually between 10 to 100 observations per second); however, most studies aggregate the data over one minute epochs, or windows, and often, using a user specified threshold, the data are characterized into activity counts per minute. While thresholding methods are useful in describing the timing and duration for certain levels of PA, many nuances of the data are lost. For example, it is not possible to evaluate how a person is walking from activity count summaries. Especially in certain populations, such as older or obese populations, this raises the question as to whether a more detailed quantification of the walking signal can provide additional information. For example, if an older person’s legs are bothering them, we may detect signs of limping that could help explain the low levels of PA. Our strategy is to extract detailed information from the raw accelerometry signal during periods of walking. We transform this information into useful quantities, and then we build regression models to associate characteristics of walking with continuous responses.
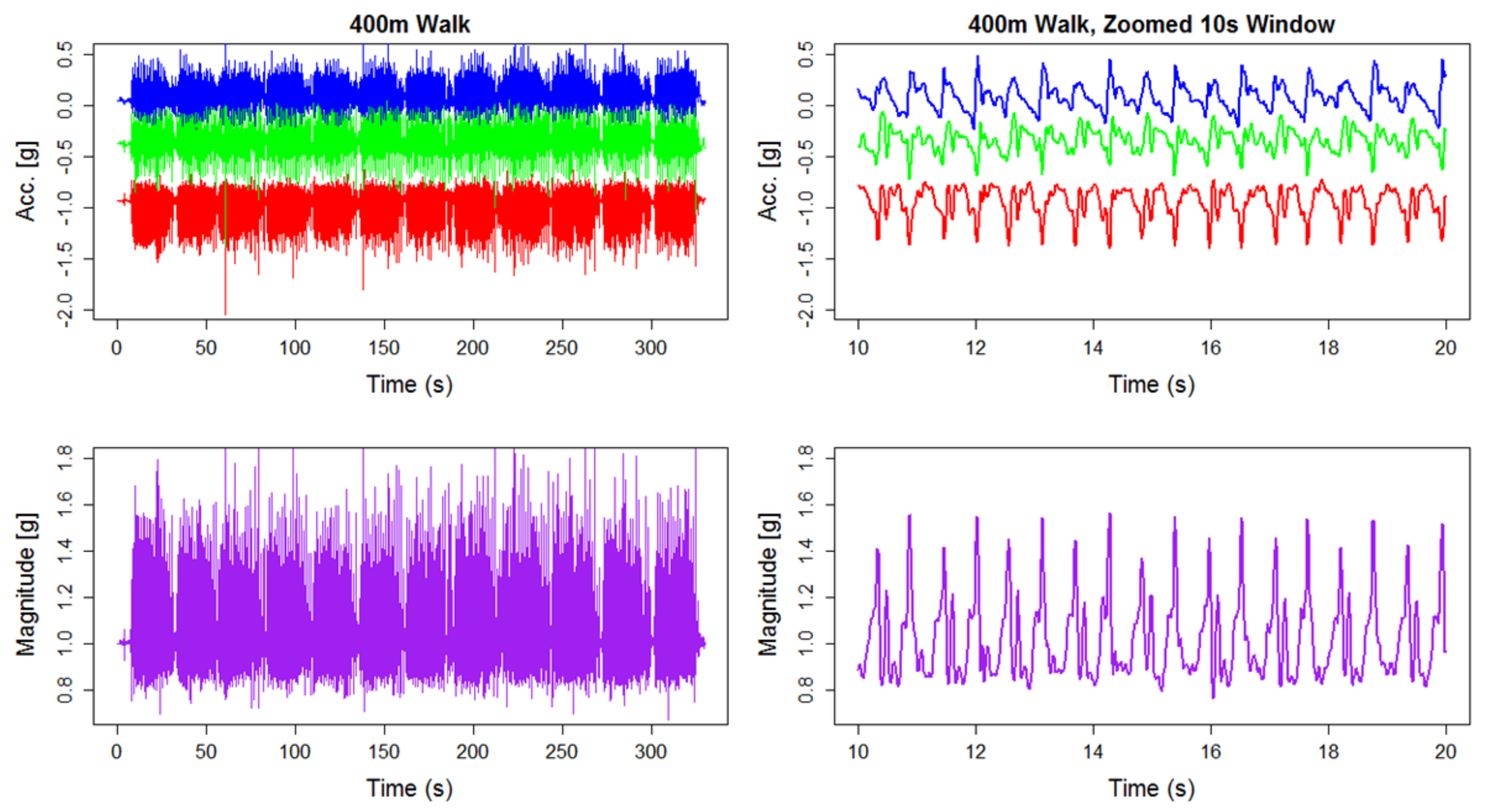
To illustrate the complex nature of the data collected,
Figure 1 shows the raw data collected from a triaxial accelerometer (Actigraph GT3X+) for a single individual during an in-laboratory 400 m walk. The top left panel of
Figure 1 presents the entire 400 m walk, where each axis is shown in a different color. With just over 5 min worth of data, the characteristics of the signal are nearly impossible to visualize. The top right panel of
Figure 1 shows a 10 s window of the same data. At this scale, we can discern a fairly periodic signal. In the bottom row of
Figure 1, we present the vector magnitude of the same data presented in the top row. We can see that the periodic nature of the data are preserved while information about the three dimensional direction is lost. However, in free-living data collection, it is difficult to control the orientation of the device when participants are able to remove the device. For this reason, the magnitude of the signal is sufficient and relatively stable to capture the gait characteristics described in this manuscript. The periodic characteristics of walking naturally lend themselves to a frequency analysis approach for quantifying the features of walking. By utilizing the methods described in Urbanek et al. [
15], we can extract estimates of cadence (steps per second) and average magnitude from windows of raw data. In addition to these more common features, we also utilize the spectra obtained from the local fast Fourier Transform (FFT) as a functional predictor for modeling the association of walking with continuous responses such as age and body mass index (BMI). By incorporating the walking spectra as a predictor, we gain additional information about the characteristics of a person’s gait which may be associated with the response of interest. For example, an individual with a very smooth walking stride would result in most of the energy from walking concentrated around the frequencies near the cadence. However, an individual with an interrupted stride (e.g., a limp) would result in energy being more dispersed through higher frequencies.
Several methods exist for fitting a scalar-on-regression function, such as
, where
is a functional predictor and
y is a scalar response variable. Several methods for estimating
are based on the eigenfunctions associated with some covariance operator defined by the predictors [
17]. Due to the periodic nature of walking, we have strong reason to believe the vast majority of information contained in the walking spectra will be located around the harmonics centered at multiples of the dominant frequency. The PEER method developed by Randolph et al. [
17] allows for the incorporation of presumed structure directly into the estimation process and is preferable to a purely empirical estimator. This particular method has been widely used in other areas of research, for example, in heritability and evolution studies [
18,
19] and in microbiome analysis [
20]. However, to the best of our knowledge, this is a novel use of the PEER method in the analysis of the raw accelerometry data.
In this manuscript, we propose a novel application of recently developed statistical methods for the analysis of accelerometry data by associating continuous responses, such as age and BMI, with the Fourier spectrum of walking. The purpose of this manuscript is to serve as a proof of concept for researchers seeking to utilize more information from the accelerometry data in modeling associations between characteristics of walking and health related outcomes. We show how this additional information can be combined with scalar predictors in a linear regression model framework. The remainder of this manuscript is structured as follows. In
Section 2, we describe the data collection and pre-processing procedures. In
Section 3, we describe the functional linear model used to fit the data and how the estimation is performed. In
Section 4, we apply the proposed model to data collected in the laboratory from a study of an aging adult population. In
Section 5, we conclude with a discussion.
2. Data Collection and Pre-Processing
Eighty-nine community-dwelling older adults were recruited from the Pittsburgh, Pennsylvania area for the National Institute on Aging, Aging Research Evaluating Accelerometry (AREA) project, part of the Developmental Epidemiologic Cohort Study (DECOS) [
3]. AREA was a cross-sectional methodological initiative designed to examine the impact of accelerometry wear location on assessment of physical activity and sedentary behavior among 89 older adults enrolled between March and May of 2010 [
21]. The report included data from 51 healthy participants (25 men and 26 women) who had complete the “in-the-lab” (
) or “in-the-wild” (
) accelerometry data. Individuals were excluded from the DECOS study for the following reasons: hip fracture, stroke in the past 12 months, cerebral hemorrhage in the past 6 months, heart attack, angioplasty, heart surgery in the past 3 months, chest pain during walking the past 30 days, current treatment for shortness of breath or a lung condition, usual aching, stiffness, or pain in their lower limbs and joints, and bilateral difficulty in bending or straightening the knees fully [
22]. This paper focuses on the
participants that completed the “in-the-lab” fast-paced 400 m walk. Data were collected with an Actigraph GT3X+ worn at the right hip. The devices collected raw accelerometry data along three orthogonal axes at a sampling frequency of 80 Hz. A summary of the demographic data for all
participants is provided in
Table 1.
The first step in pre-processing the data is to split the observed triaxial signal from the 400 m walk into 10 s non-overlapping windows. For each window, we transform the raw triaxial signal into vector magnitude (
), where
is defined as the root sum of squares of the three axes, i.e.,
. The vector magnitude count (
) is then calculated as the mean absolute deviation of the
:
where
is the window size expressed as number of sampling points [
15]. We then transform the
from the time domain into the frequency domain using the local FFT, or short time Fourier transform (STFT). Similarly to Urbanek et al. [
15], we define the STFT at time
t of the
as
where
f is the frequency index and
is a tuning parameter specifying the number of observations in the interval centered at
t. The Hanning weights, defined as,
are used to avoid a blurring of the obtained spectra which can happen as a result of the windowing process. The spectrum is then defined as the absolute value of the STFT,
.
For each spectrum obtained, we then identify the fundamental frequency (cadence) as the location of the largest peak in the spectrum. Since the reported frequency of walking is between 1.4 and 2.5 Hz [
23], which corresponds to 1.4 to 2.5 steps per second, we look for the cadence in a conservative range of 1.2–4.0 Hz to be consistent with Urbanek et al. [
15]. The frequency axis used is from 0 to 39.9 Hz sampled every 0.1 Hz which ensures every individual’s spectra will contain at least 10 multiples of their dominant frequency, or cadence. In the top left panel of
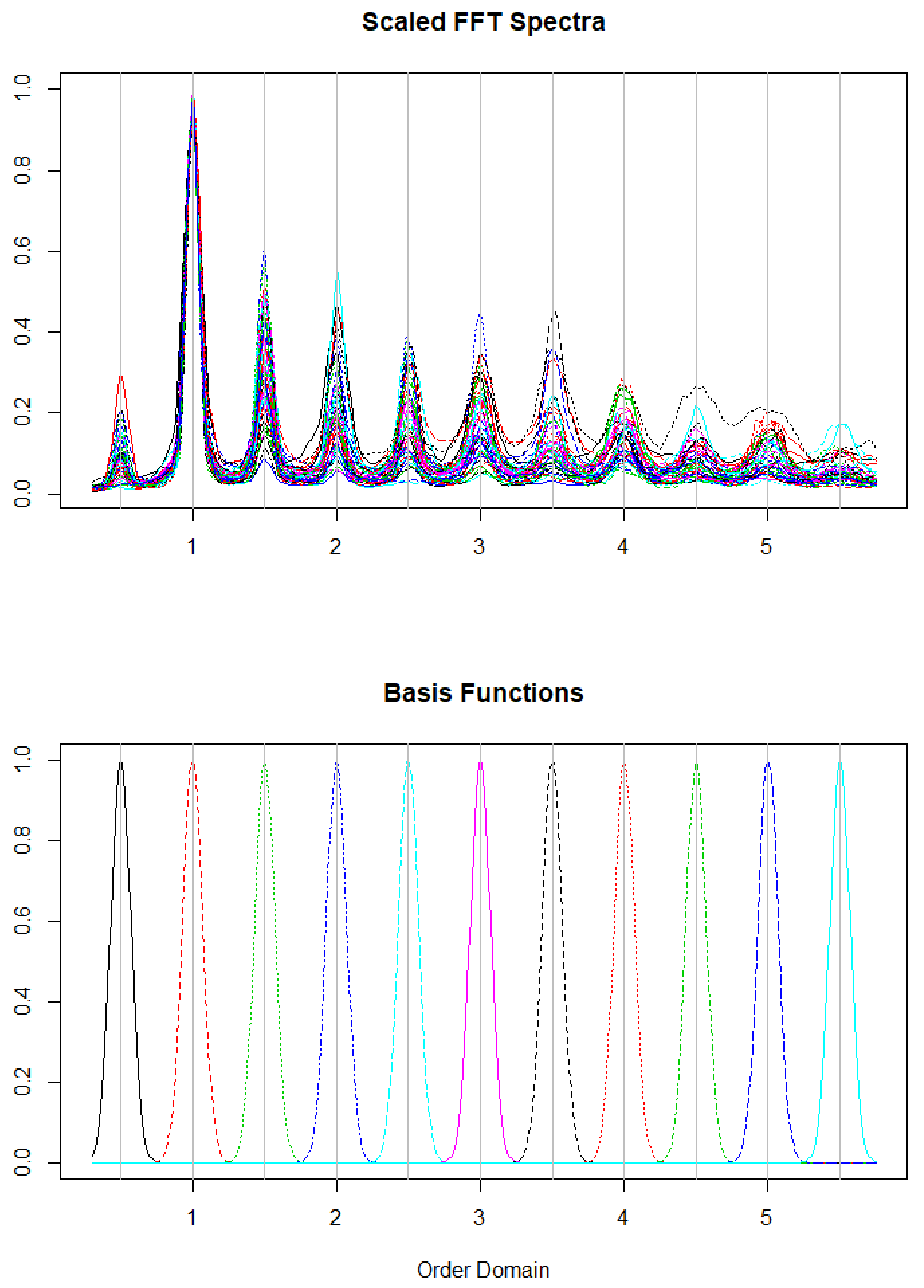
Figure 2, we display all spectra for a single participant. Although these spectra appear similar, it is evident that there is variability between spectra obtained in different windows. Therefore, once the spectra are all obtained, and we have identified their fundamental frequencies, it is imperative that we align each spectrum for aggregation.
In order to align all spectra at their fundamental frequency, we further transform each spectrum from the frequency domain into the order domain by scaling the frequency axis by the fundamental frequency for each spectrum. Linear interpolation is then used to place each spectrum back on the same sampling grid. This ensures that all spectra are aligned and sampled at equally spaced points. The top right panel of
Figure 2 illustrates how the realigned spectra for a single participant. As can be seen, all spectra are perfectly aligned at the dominant frequency.
However, each spectrum is sampled discretely, therefore, further harmonics may be slightly misaligned in the order domain. To compensate, we average the spectra across all windows for each participant in order to obtain a global estimate of walking features for each individual. Each spectrum is restricted to 546 points between 0.3 and 5.75 in the order domain to avoid modeling signal noise at the beginning and end of the spectra. The bottom left panel of
Figure 2 shows the averaged spectra for all
participants. The peaks of the average spectra for each individual are now nearly perfectly aligned in the order domain at multiples of the fundamental frequency.
Finally, we scale each individual’s average spectrum by the magnitude of the spectrum at the cadence. By scaling the spectra in this way, the magnitude at each harmonic can be interpreted as a ratio to the magnitude at the cadence. This process is illustrated in bottom right panel of
Figure 2, and this entire process is fully detailed in Algorithm 1. These steps for pre-processing the raw accelerometry data are essential in order to properly fit the statistical model described in
Section 3.
| Algorithm 1: Steps for pre-processing the raw accelerometry data. |
Input: —accelerometry signal, —sampling frequency, Hz, Hz
Output: —scaled average FFT spectrum, —average VMC, —average cadence
1 Divide accelerometry signal into 10 s non-overlapping windows.
2 Transform accelerometry signal into vector magnitude .
3 Compute vector magnitude count, , for each window.
4 Compute Fourier spectrum for each window.
5 Estimate cadence as frequency centered under the largest peak in spectrum.
6 Transform spectra from frequency domain to order domain by scaling frequency axis by the frequency of the cadence.
7 Average vector magnitude count, cadence, and order domain spectra across all windows.
8 Restrict spectra to points between 0.3 and 5.75 multiples of the cadence frequency.
9 Scale spectra by magnitude of the average spectra at the cadence. |
3. Statistical Methods
Frequently, the methods applied to analyze the data arising from the raw accelerometry signal rely on the discrete features extracted from such data, leading to possible loss of information. In contrast, we take the full time series signal into account and work with its continuous properties, namely, the spectrum obtained from the walking portion of the accelerometry signal. We summarize the approach taken below.
Let
denote a functional predictor (e.g., a scaled average FFT spectrum) from the
ith study participant where
. We will assume that each observed predictor is obtained as a discretized version of an idealized function at
p equally-spaced points,
, as can be seen in the walking spectra in
Figure 2. We let
be the
vector of values sampled from
. Then our observed data take the form
where
is a scalar response,
is a
vector of measurements from
K scalar predictors (e.g., sex or average cadence), and
is the functional predictor from the
ith participant. We denote the true coefficient function by
, and then, the functional regression model of interest is given by
where
. Here
is the linear effect from
K scalar predictors and
is the functional effect.
3.1. Estimation of Parameters
Several approaches can be used to estimate the association between the scalar
and functional
predictors with the outcome
. In our work, we utilize the approach proposed in Randolph et al. [
17], which incorporates functional structure into the estimation of
. Specifically, the properties of the estimated spectra, i.e., their continuity, smoothness, and common behavior, are taken into the estimation procedure explicitly. To represent our model in a compact form, we combine the data from all
N participants and express Equation (
3) as
where
is an
vector of responses;
is an
design matrix corresponding to the scalar predictors with coefficient vector
;
is an
design matrix corresponding to the functional predictors with functional coefficient vector
.
Given the periodic nature of the walking behavior, if the walking spectral properties are associated with the outcomes, the relevant information contained in the walking spectra is localized around the harmonics at multiples of the dominant frequency. We thus want to estimate
while imposing this prior information on its functional structure. We achieve this by using the penalty operator,
L [
17], which is created from the basis functions in the right panel of
Figure 3. The penalized estimates of
and
are obtained as the solution to the following criterion
where we only penalize the functional coefficient vector
.
Given some prior knowledge about the structure of our functional predictor, the penalty is defined utilizing a subspace containing this information [
17]. We define this informative space,
Q, to be a span of basis functions (right panel of
Figure 3) emphasizing the relevant features of
and consider the orthogonal projection
. As described in Randolph et al. [
17], we define the decomposition-based penalty as
for some
. When
the estimate is penalized more in the non-informative space orthogonal to
Q. When
, the estimate is simply an ordinary ridge regression estimate. Therefore, a generalized ridge estimate of
and
can be obtained as
where
and
. The tuning parameter,
, is estimated in a principled way via a linear mixed model equivalence, as described in Ruppert et al. [
24]. Specifically, the optimization criterion (
5) is written in an equivalent linear mixed model form with the coefficients
being fixed and the coefficients
being random with a distribution
. The estimate of the tuning parameter,
, is then simply the ratio of the variances
and
.
4. DECOS Example
We applied the methods discussed in
Section 3 to the data described in
Section 2 to study the associations of walking spectra obtained from the fast-paced 400 m walk with age and BMI [
3]. The fast-paced 400 m walk is often used in epidemiological studies of older adults to assess aerobic fitness [
25]. The most common protocol implemented for the fast-paced 400 m walk is the long distance corridor walk (LDCW) [
26]. The pre-processed walking spectra described in Section
Figure 2 were each sampled at
distinct sampling points within 0.3 and 5.75 of the order domain. This range was chosen because there is little energy contained in the spectra beyond 13.5 Hz. Assuming an average cadence of 2.0 Hz, this range sufficiently covers the relevant features of walking. There were
participants that completed the LDCW. In addition to each participant’s scaled average walking spectra, an estimate of their average cadence was used as a predictor in the proposed models to control for participant-specific walking speeds. In addition,
was used to control for the energy magnitude each participant produced. For example, an individual with a very controlled and smooth walking style would have shown lower magnitude than an individual with a heavy stomp in their walk. We also adjusted each model for gender differences.
In order to use our prior knowledge about the structure of the walking spectra, we define a penalty
as given in Equation (
6) (with
). We define our basis functions as normal density functions centered at multiples of the cadence from
to
using steps of
. We chose a standard deviation such that the distributions were nearly orthogonal. Scaled average walking spectra and basis functions are displayed in
Figure 3.
Following the general formulation of the functional regression model (3), we fit the following model to these data:
where
is either age or BMI,
is a binary variable, and
and
are the cadence and vector magnitude count for participant
i, respectively.
is the scaled average walking spectrum for participant
i as described in
Section 2. We assume that
. Regression coefficients
and the regression function
are estimated via the procedure described in
Section 3.1 using the peer() function from the refund package in R [
27,
28]. Thus, the scalar outcome
is predicted via a weighted sum of the products of the collected data (indicator variable of male sex, cadence, VMC, and a spectrum) and their respective estimated regression coefficients
’s and
.
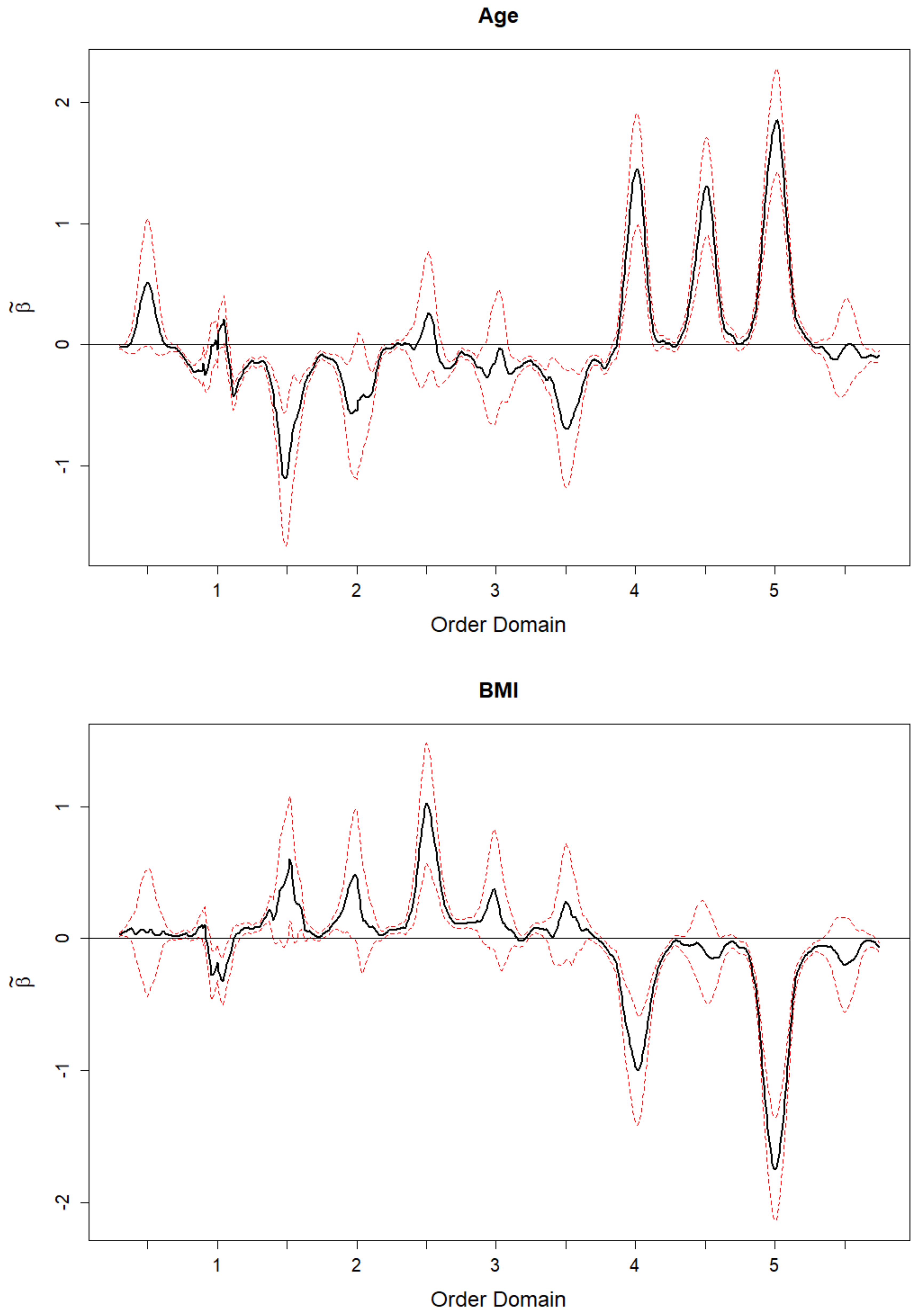
Figure 4 displays the estimates of
along with the pointwise 95% confidence bands for the two models described in Equation (
8). These figures show that the estimated regression function is different from zero at different multiples of the cadence. The regression function for age (top) shows that the coefficient function,
, is negative at the multiples 1.5 and 3.5 and positive at the multiples 4, 4.5, and 5, whereas for the other multiples the estimated coefficients are not significantly different from zero. These results indicate that younger individuals have larger magnitude in the lower harmonics relative to the magnitude at their cadence which indicates a heavier stomp component and controlled walking motion. Older individuals have larger magnitudes in the higher harmonics relative to the magnitudes of their cadence, which indicates a less controlled compensatory walking motion (e.g., a limp). These results seem to be consistent with findings of prior research [
29,
30,
31,
32,
33,
34,
35]. However additional research is needed to validate our conclusions.
The regression results for BMI (bottom) show that the coefficient function,
, is positive at the multiple 2.5 and negative at the multiples 4 and 5, whereas for the other multiples the estimated coefficients are not significantly different from zero. These results could indicate that overweight or obese individuals tend to walk with a heavier stomp component, resulting in higher magnitudes of the lower harmonics than the normal weight individuals. Leaner individuals walk with a lighter stomp component, resulting in walking characteristics with lower magnitudes in the lower harmonics and higher magnitudes in the higher harmonics. Further discussion and possible limitations of this interpretation are provided in
Section 5.
Both results described above show that the information provided by the penalty reduces the number of spurious findings and at the same time emphasizes the signal content of the scaled Fourier spectra.
5. Discussion
In this paper we proposed a novel application of existing functional linear model methods to the study of physical activity data collected by accelerometers. We proposed an algorithm for pre-processing the raw data collected from accelerometers to quantify the characteristics of walking in a more detailed manner than is typically used with activity count summaries. By utilizing the periodic characteristics of walking, we were able to reduce the dimensionality of the raw data into a form that retained some details of the original signal while allowing us to use existing statistical methods for analyses. We applied these methods to the in-the-laboratory data collected from a study of an older adult population.
While FFT has been widely used for pre-processing accelerometry data, the features extracted from such methods have been applied to the problem of classification of activity types as opposed to associating characteristics of walking to continuous response variables [
15,
36,
37,
38]. To our knowledge, this is the first proposed application of functional linear regression techniques to model the association of walking spectra with continuous responses. Due to the periodic characteristics of walking, the proposed method naturally lends itself to this application, wherein we can inform the penalty operator of where the relevant information is contained in the spectra. This method is not limited to the cross-sectional setting, as demonstrated in this paper, and it is easily extended to responses collected longitudinally [
39]. In addition to walking speed, this more detailed quantification of walking may provide additional information as to how certain degenerative diseases (e.g., Parkinson’s disease and multiple sclerosis) affect a person’s ability to walk over the progression of disease. Reuter et al. [
40] showed that certain walking programs can actually improve gait characteristics of individuals with Parkinson’s disease over the course of a 6-month study. Gait characteristics were measured on a specialized treadmill outfitted with specialized sensors to accurately measure foot-ground contact. The application of these proposed methods could alleviate any financial restrictions of such studies to allow for much larger randomized prospective studies to determine whether these exercise therapies actually slow down the progression of such diseases. Utility of these methods can only be assessed with the inclusion of accelerometers in such studies, and they are being increasingly used.
We acknowledge that there are limitations in our analyses. For example, we did not collect data from the 3D motion capture or ground force reaction (GFR) measurements to validate the findings of our analyses. This manuscript is meant to demonstrate how researchers can utilize existing statistical methodology to analyze finer features of the raw accelerometry data retaining additional information about characteristics and changes in gait that are usually lost due to over-aggregation of the raw data collected. It was beyond the scope of this study to obtain information from specialized laboratory equipment, but we do feel that further research is warranted to validate our findings and draw associations between the additional characteristics of gait observed in our analyses with gait measurements obtained in a laboratory. Ko et al. [
33] found that older adults with obesity modify their gait patterns compared to normal weight counterparts while walking at normal and fast speeds. For example, they found that obese participants had lower mechanical work expenditure (MWE) in the ankle and significantly higher MWE in the knee and hip compared to normal weight participants. Paired with the raw accelerometry data, these findings could identify the specific mechanisms validating the additional associations we found in our analyses. Menz et al. [
31] observed that older participants exhibited a more conservative gait pattern characterized by reduced velocity, shorter step length, and increased step timing variability which could be contributing to the portion of the signals observed at the higher frequencies of the walking spectra in our study.
In conclusion, we acknowledge that age and BMI are easy to measure, but the strength of this study is that it serves as a proof of concept for how researchers can utilize the extracted walking characteristics in the presence of more relevant health related outcomes, e.g., fatigability or neurocognitive function. In addition, we studied only relatively healthy elderly individuals. Thus, generalizability of the findings to either healthy younger individuals or unhealthy older individuals needs to be studied. Given the small sample size of our study and utilization of the data from the laboratory experiment only, additional research is needed to establish similar associations between the health outcomes and the free-living walking data characteristics.










{kind=link}
{kind=link}
{kind=link}
{kind=link}