Motion Capture Data Analysis in the Instantaneous Frequency-Domain Using Hilbert-Huang Transform


Abstract
:1. Introduction
2. Materials and Methods
2.1. Hilbert-Huang Transform and Empirical Mode Decomposition
2.1.1. Analytical Signal and Hilbert Transform
2.1.2. Intrinsic Mode Functions (IMFs) and Trend
- The number of signal extrema and the number of zero crossings points are equal, or their difference is 1; and
- At any time, the mean value of the envelope formed by the maximum, and the envelope formed by the minimum is zero.
2.1.3. One-Variable Empirical Mode Decomposition
- Calculate residual (Let in the first iteration);
- Initialize and extract one IMF; and
- Find maximum envelope and minimum envelope of using cubic spline functions
- Obtain by subtracting the average envelope from
- Let and repeat step 2 until the convergence condition () is satisfied, add into the IMF set
- Subtract from and repeat step 1 and 2 to expand to all IMFs and a residual .
2.1.4. Multivariate Empirical Mode Decomposition
- Perform a dimensional sphere created by Hammersley sequence;
- Prepare several n dimensional unit vectors V (64 in this paper);
- Make the projections of the input multivariate signals for all channels, root position, and all Euler angles of each joint from a hierarchical human skeleton in motion, based on the directional vector V;
- Determine the maximum and minimum positions from the projections ;
- Create multi-dimensional envelopes from the multivariate signals using cubic spline functions;
- Calculate the mean from the directional vectors of all channels;
- Obtain and repeat the above procedure to , unless the convergence condition of is satisfied. Then add as a decomposed pseudo monochromatic motion into the IMF set for all channels; and
- Repeat steps 1–7 until all IMFs are obtained.
2.1.5. Weighted Average Frequency Algorithm
2.2. Proposed Motion Analysis Framework Using Hilbert-Huang Transform
- Prepare positions X, Y, Z of the root joint (hip), and three Euler angles , , of each joint obtained from the hierarchical skeleton. Here, the number of multivariate input channels is (root position) + (degrees of freedom) × (number of joints). For example, in the case of the motion data in Carnegie Mellon University Motion Capture Database, there are three positions of the root joint, three degrees of freedom of 43 joints, giving 132 channels;
- Apply MEMD to all prepared data to obtain a set of IMFs and a trend for each multivariate input channel ( for CMU database);
- Output these IMFs and the trend as motion data, and confirm if the vibration components (decomposed motions) are completely separated;
- Apply HT to each IMF to obtain the instantaneous frequencies and instantaneous amplitudes.
- Apply WAFA to smooth out the instantaneous frequencies of each IMF to obtain the average frequency of each decomposed motion; and
- Analyze decomposed motions with the HT spectrum and average frequencies (angular velocities of motion primitives) in the frequency-domain.
2.3. Input Data and Joint Angles , ,
2.4. Decomposed Motions
3. Results
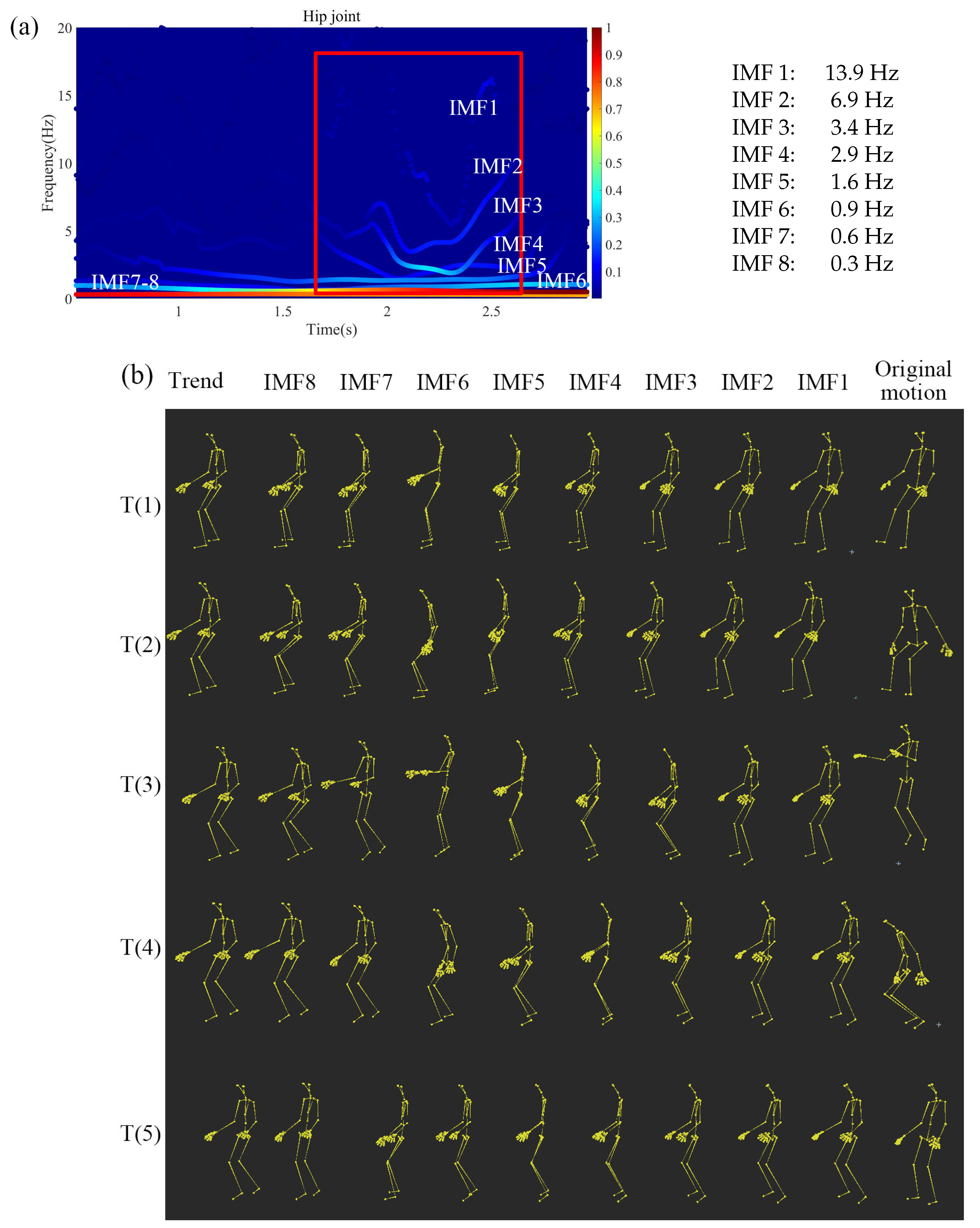
3.1. Jump Motion Decomposition
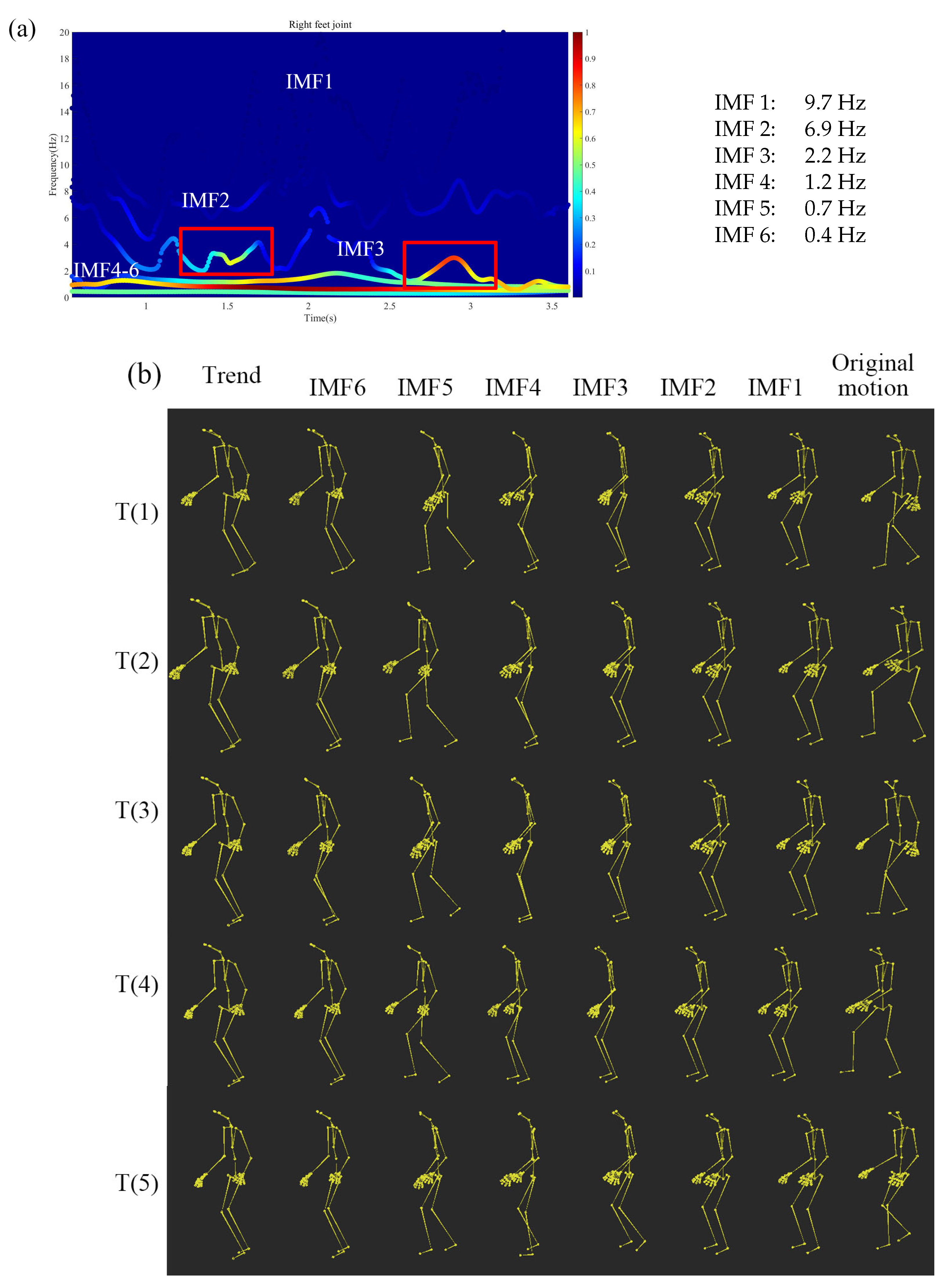
3.2. An Injured Gait Motion Decomposition
3.3. A Golf Swing Motion Decomposition
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| HHT | Hilbert-Huang transform |
| HT | Hilbert transform |
| FT | Fourier transform |
| WT | Wavelet transform |
| EMD | empirical mode decomposition |
| IMF | intrinsic mode function |
| MEMD | multivariate empirical mode decomposition |
| CMU | Carnegie Mellon University |
References
- Moeslund, T.B.; Hilton, A.; Krüger, V. A survey of advances in vision-based human motion capture and analysis. Comput. Vis. Image Underst. 2008, 10, 142–149. [Google Scholar]
- Kim, Y.J.; Kim, K.D.; Kim, S.H.; Lee, S.; Lee, H.S. Golf swing analysis system with a dual band and motion analysis algorithm. IEEE Trans. Consum. Electron. 2017, 63, 309–317. [Google Scholar] [CrossRef]
- Hssayeni, M.D.; Jimenez-Shahed, J.; Burack, M.A.; Ghoraani, B. Wearable sensors for estimation of parkinsonian tremor severity during free body movements. Sensors 2019, 19, 4215. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanzari, M.; Ntouskos, V.; Pirri, F. Discovery and recognition of motion primitives in human activities. PLoS ONE 2019, 14, e0214499. [Google Scholar] [CrossRef] [Green Version]
- Schaal, S. Dynamic movement primitives-a framework for motor control in humans and humanoid robotics. Adapt. Motion Anim. Mach. 2006, 14, 261–280. [Google Scholar]
- Bracewell, R.N.; Bracewell, R.N. The Fourier Transform and Its Applications; McGraw-Hill: New York, NY, USA, 1986. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Caramia, C.; De Marchis, C.; Schmid, M. Optimizing the Scale of a Wavelet-Based Method for the Detection of Gait Events from a Waist-Mounted Accelerometer under Different Walking Speeds. Sensors 2019, 19, 1869. [Google Scholar] [CrossRef] [Green Version]
- Kalampratsidou, V.; Torres, E.B. Peripheral Network Connectivity Analyses for the Real-Time Tracking of Coupled Bodies in Motion. Sensors 2018, 19, 3117. [Google Scholar] [CrossRef] [Green Version]
- Rehman, N.; Mandic, D.P. Multivariate empirical mode decomposition. Proc. R. Soc. A Math. Phys. Eng. Sci. 2009, 466, 1291–1302. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P.; Gonçalves, P.; Lilly, J.M. Bivariate empirical mode decomposition. IEEE Signal Process. Lett. 2007, 14, 936–939. [Google Scholar] [CrossRef] [Green Version]
- ur Rehman, N.; Mandic, D.P. Empirical mode decomposition for trivariate signals. IEEE Trans. Signal Process. 2009, 58, 1059–1068. [Google Scholar] [CrossRef]
- ur Rehman, N.; Park, C.; Huang, N.E.; Mandic, D.P. EMD via MEMD: Multivariate noise-aided computation of standard EMD. Adv. Adapt. Data Anal. 2013, 5, 1350007. [Google Scholar] [CrossRef] [Green Version]
- Dong, R.; Cai, D.; Asai, N. Nonlinear Dance Motion Analysis and Motion Editing using Hilbert-Huang Transform. In Proceedings of the Computer Graphics International 2017, Yokohama, Japan, 27–30 June 2017; No. 35. pp. 1–6. [Google Scholar]
- Dong, R.; Cai, D.; Asai, N. Dance Motion Analysis and Motion Editing using Hilbert-Huang Transform. In Proceedings of the ACM SIGGRAPH 2017 Talks, Los Angeles, CA, USA, 30 July–3 August 2017; No. 75. pp. 1–2. [Google Scholar]
- Carnegie Mellon University Motion Capture Database. Available online: http://mocap.cs.cmu.edu/ (accessed on 8 May 2020).
- Huang, N.E. Hilbert-Huang Transform and Its Applications; World Scientific: Singapore, 2014. [Google Scholar]
- Boashash, B. Estimating and interpreting the instantaneous frequency of a signal. I. Fundamentals. Proc. IEEE 1992, 80, 520–538. [Google Scholar] [CrossRef]
- Niu, J.; Liu, Y.; Jiang, W.; Li, X.; Kuang, G. Weighted average frequency algorithm for Hilbert–Huang spectrum and its application to micro-Doppler estimation. IET Radar Sonar Navig. 2012, 6, 595–602. [Google Scholar] [CrossRef]
- Omkar, S.N.; Vanjare, A.M.; Suhith, H.; Kumar, G.H.S. Motion Analysis for Short and Long Jump. J. Sport. Sci. 2012, 12, 132–143. [Google Scholar] [CrossRef]
- Sorenson, B.; Kernozek, T.W.; Willson, J.D.; Ragan, R.; Hove, J. Two-and three-dimensional relationships between knee and hip kinematic motion analysis: Single-leg drop-jump landings. J. Sport Rehabil. 2015, 24, 363–372. [Google Scholar] [CrossRef]
- Nam, C.N.K.; Kang, H.J.; Suh, Y.S. Golf swing motion tracking using inertial sensors and a stereo camera. IEEE Trans. Instrum. Meas. 2013, 63, 943–952. [Google Scholar] [CrossRef]
- Chu, Y.; Sell, T.C.; Lephart, S.M. The relationship between biomechanical variables and driving performance during the golf swing. J. Sport. Sci. 2010, 28, 1251–1259. [Google Scholar] [CrossRef]
- Gill, P.R.; Wang, A.; Molnar, A. Benchmarking of a full-body inertial motion capture system for clinical gait analysis. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 21–24 August 2008; pp. 4579–4582. [Google Scholar]
- Pfister, A.; West, A.M.; Bronner, S.; Noah, J.A. Comparative abilities of Microsoft Kinect and Vicon 3D motion capture for gait analysis. IEEE Trans. Signal Process. 2014, 38, 274–280. [Google Scholar] [CrossRef]
- Huang, J.; Xie, J.; Li, F.; Li, L. A threshold denoising method based on EMD. J. Theor. Appl. Inf. Technol. 2013, 47, 419–424. [Google Scholar]
- Gill, P.R.; Wang, A.; Molnar, A. The in-crowd algorithm for fast basis pursuit denoising. IEEE Trans. Signal Process. 2001, 59, 4595–4605. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | Average Frequency for Each k |
|---|---|
| Motion Capture Data | Jump | Gait of Foot Injured Subject | Golf Swing |
|---|---|---|---|
| Time (s) | 3.3 | 3.7 | 3.8 |
| Maximum frequency (Hz) | 30 | 30 | 30 |
| Minimum frequency (Hz) | 0.30 | 0.27 | 0.26 |
| IMF | Foot | Knee | Thigh | Hip | Neck |
|---|---|---|---|---|---|
| 1 | 11.8 | 11.6 | 12.3 | 22.08 | 5.93 |
| 2 | 6.58 | 6.21 | 6.71 | 6.95 | 5.96 |
| 3 | 4.7 | 3.66 | 2.33 | 3.99 | 4.01 |
| 4 | 1.7 | 2.39 | 1.65 | 2.42 | 1.88 |
| 5 | 1.53 | 1.42 | 1.46 | 1.46 | 1.02 |
| 6 | 1.04 | 1.09 | 0.92 | 0.95 | 0.88 |
| 7 | 0.57 | 0.58 | 0.54 | 0.53 | 0.54 |
| 8 | 0.33 | 0.3 | 0.28 | 0.3 | 0.3 |
| IMF | Foot | Knee | Thigh | Hip | Neck |
|---|---|---|---|---|---|
| 1 | 2.86 | 0.37 | 0.86 | 1.21 | 0.31 |
| 2 | 3.08 | 3.2 | 2.24 | 1.7 | 0.33 |
| 3 | 4.73 | 5.91 | 1.78 | 1.98 | 0.7 |
| 4 | 4.34 | 3.43 | 4.4 | 1.78 | 1.04 |
| 5 | 10.03 | 11.07 | 6.6 | 2.95 | 0.49 |
| 6 | 18.4 | 22.61 | 12.78 | 3.81 | 2.05 |
| 7 | 20.26 | 16.35 | 15.3 | 11.5 | 2.76 |
| 8 | 7.06 | 15.62 | 16.84 | 8.8 | 3.06 |
| Instantaneous Frequency | Instantaneous Amplitude | |||||
|---|---|---|---|---|---|---|
| IMF | Foot | Knee | Thigh | Foot | Knee | Thigh |
| 1 | 0.89 | 0.86 | 0.72 | 0.8 | 0.68 | 0.93 |
| 2 | 0.72 | 0.84 | 0.64 | 0.27 | 0.39 | 0.91 |
| 3 | 0.48 | 0.63 | 0.61 | 0.67 | 0.73 | 0.8 |
| 4 | 0.52 | 0.35 | 0.67 | 0.25 | −0.13 | 0.94 |
| 5 | 0.65 | 0.66 | 0.27 | 0.02 | −0.18 | 0.95 |
| 6 | 0.9 | 0.85 | 0.98 | 0.3 | 0.26 | 0.93 |
| Error (Deg) RMS (Mean) STD | ||||||
|---|---|---|---|---|---|---|
| Right | Left | |||||
| No. | Shoulder | Forearm | Hand | Shoulder | Forearm | Hand |
| IMF 1 | 0.13 0.22 | 0.04 0.08 | 0.09 0.2 | 0.1 0.17 | 0.03 0.07 | 0.09 0.15 |
| IMF 2 | 1.1 1.51 | 0.48 0.84 | 0.84 1.4 | 0.61 0.71 | 0.2 0.29 | 0.89 1.36 |
| IMF 3 | 2.51 2.97 | 0.66 0.86 | 1.88 2.26 | 2.34 2.3 | 0.71 0.8 | 1.77 2.22 |
| IMF 4 | 4.24 2.17 | 3.72 2 | 3.77 2.41 | 5.21 2.21 | 1.61 1.14 | 2.54 1.42 |
| IMF 5 | 6.92 2.47 | 6.1 2.67 | 2.07 1.18 | 9.05 2.02 | 2.75 1.6 | 3.46 1.47 |
| Trend | 29.5 2.95 | 19.69 5.17 | 9.43 5.79 | 36.29 1.74 | 11.56 4.6 | 6.95 2.28 |
| IMF | Top | Acceleration | Last 40 ms | Impact |
|---|---|---|---|---|
| 1 | 3.06 | 4.95 | 6.74 | 7.92 |
| 2 | 1.43 | 1.75 | 4.54 | 3.76 |
| 3 | 0.95 | 1.14 | 1.76 | 1.96 |
| 4 | 0.65 | 0.85 | 0.93 | 0.94 |
| 5 | 0.45 | 0.48 | 0.51 | 0.51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, R.; Cai, D.; Ikuno, S. Motion Capture Data Analysis in the Instantaneous Frequency-Domain Using Hilbert-Huang Transform. Sensors 2020, 20, 6534. https://doi.org/10.3390/s20226534
Dong R, Cai D, Ikuno S. Motion Capture Data Analysis in the Instantaneous Frequency-Domain Using Hilbert-Huang Transform. Sensors. 2020; 20(22):6534. https://doi.org/10.3390/s20226534
Chicago/Turabian StyleDong, Ran, Dongsheng Cai, and Soichiro Ikuno. 2020. "Motion Capture Data Analysis in the Instantaneous Frequency-Domain Using Hilbert-Huang Transform" Sensors 20, no. 22: 6534. https://doi.org/10.3390/s20226534
APA StyleDong, R., Cai, D., & Ikuno, S. (2020). Motion Capture Data Analysis in the Instantaneous Frequency-Domain Using Hilbert-Huang Transform. Sensors, 20(22), 6534. https://doi.org/10.3390/s20226534