A New TDR-Based Sensing Cable for Improving Performance of Bridge Scour Monitoring



Abstract
:1. Introduction
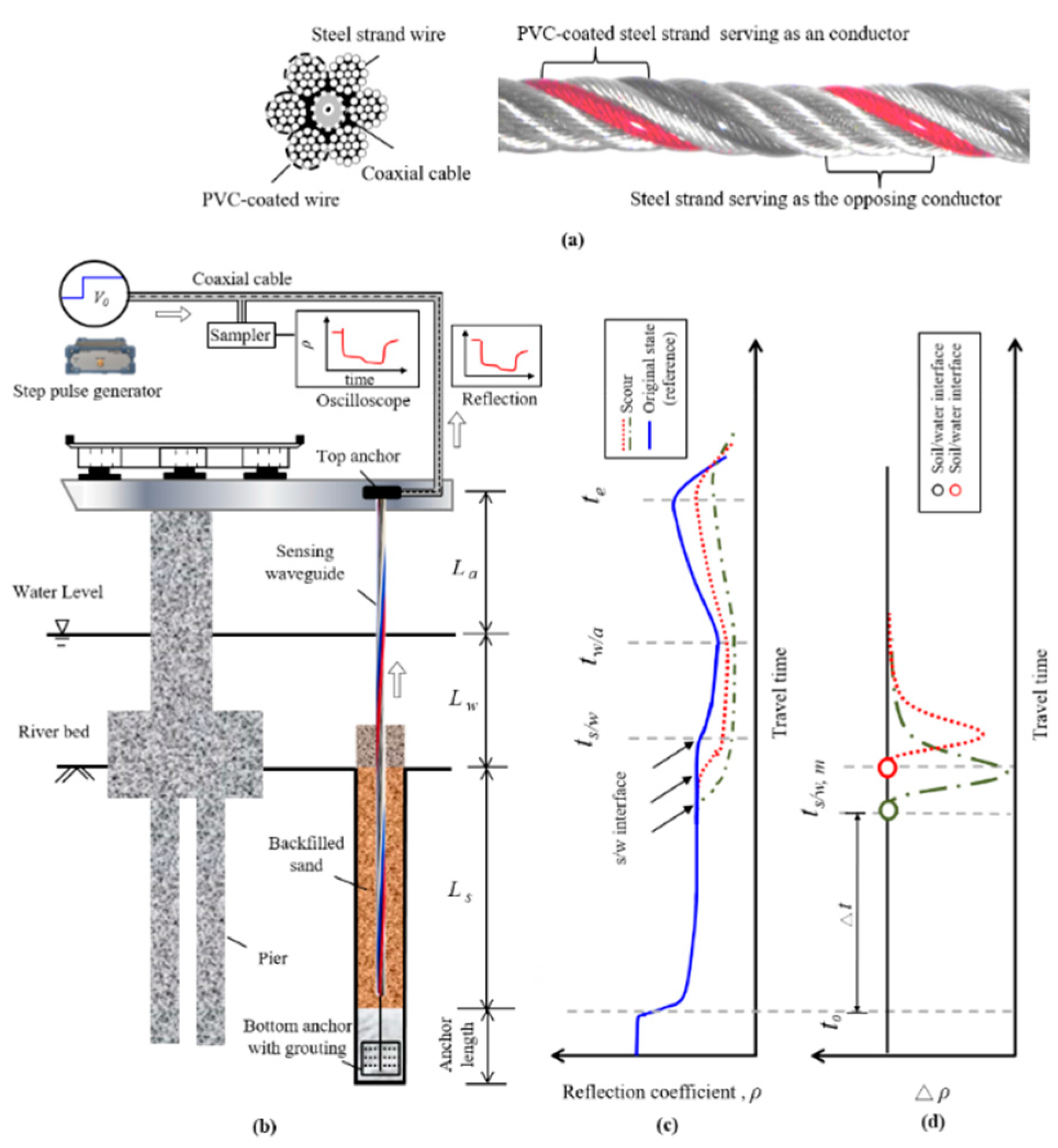
2. Background: TDR Scour Monitoring and Bundled Sensing Cable
3. Improving the Bundled TDR Sensing Cable
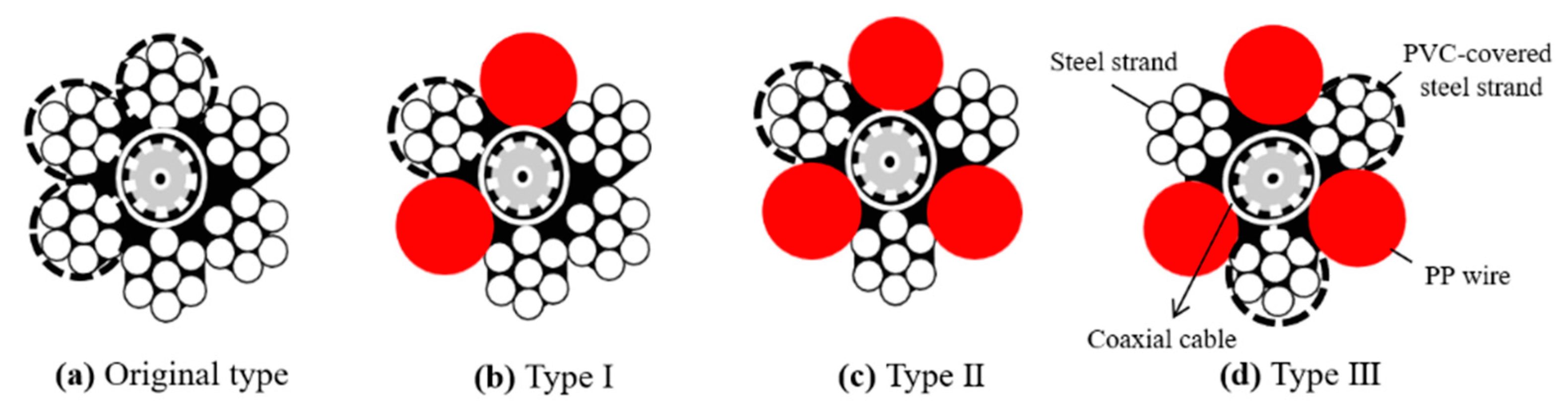
3.1. Reconfiguring Conductors and Insulators for Better Measurement Sensitivity and SNR
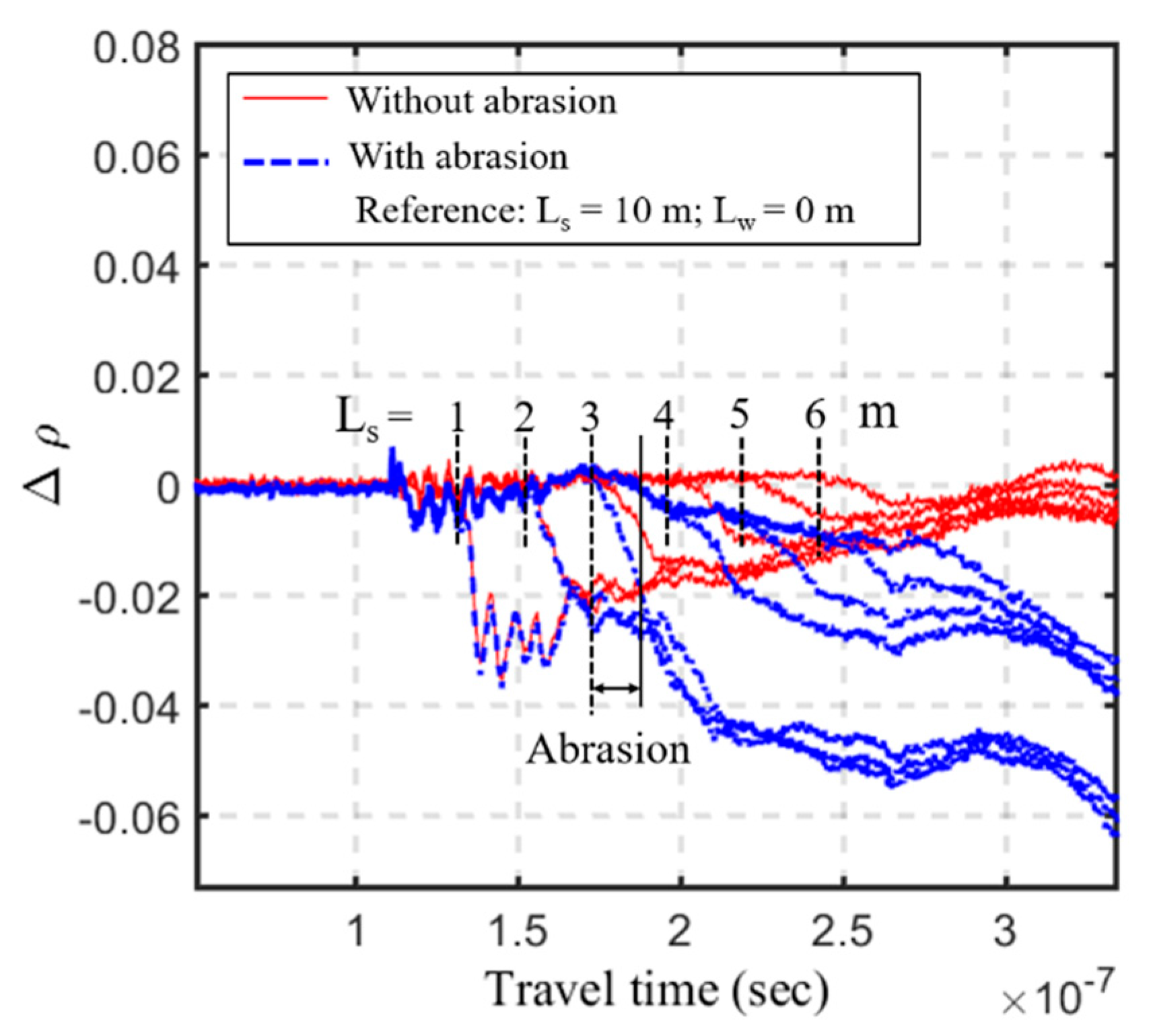
3.2. Effect of Coating Abrasion
3.3. The New Improved TDR Sensing Cable
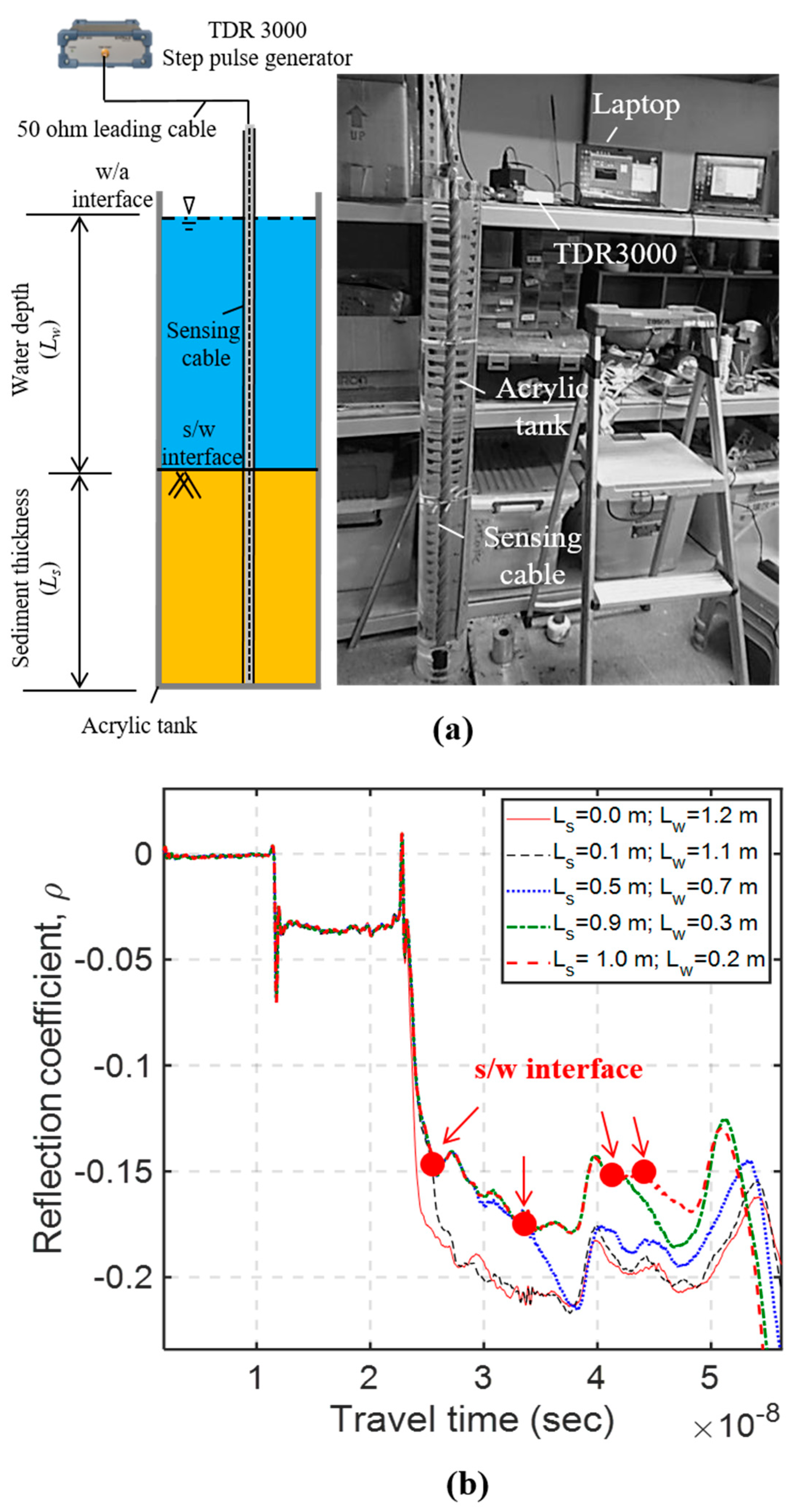
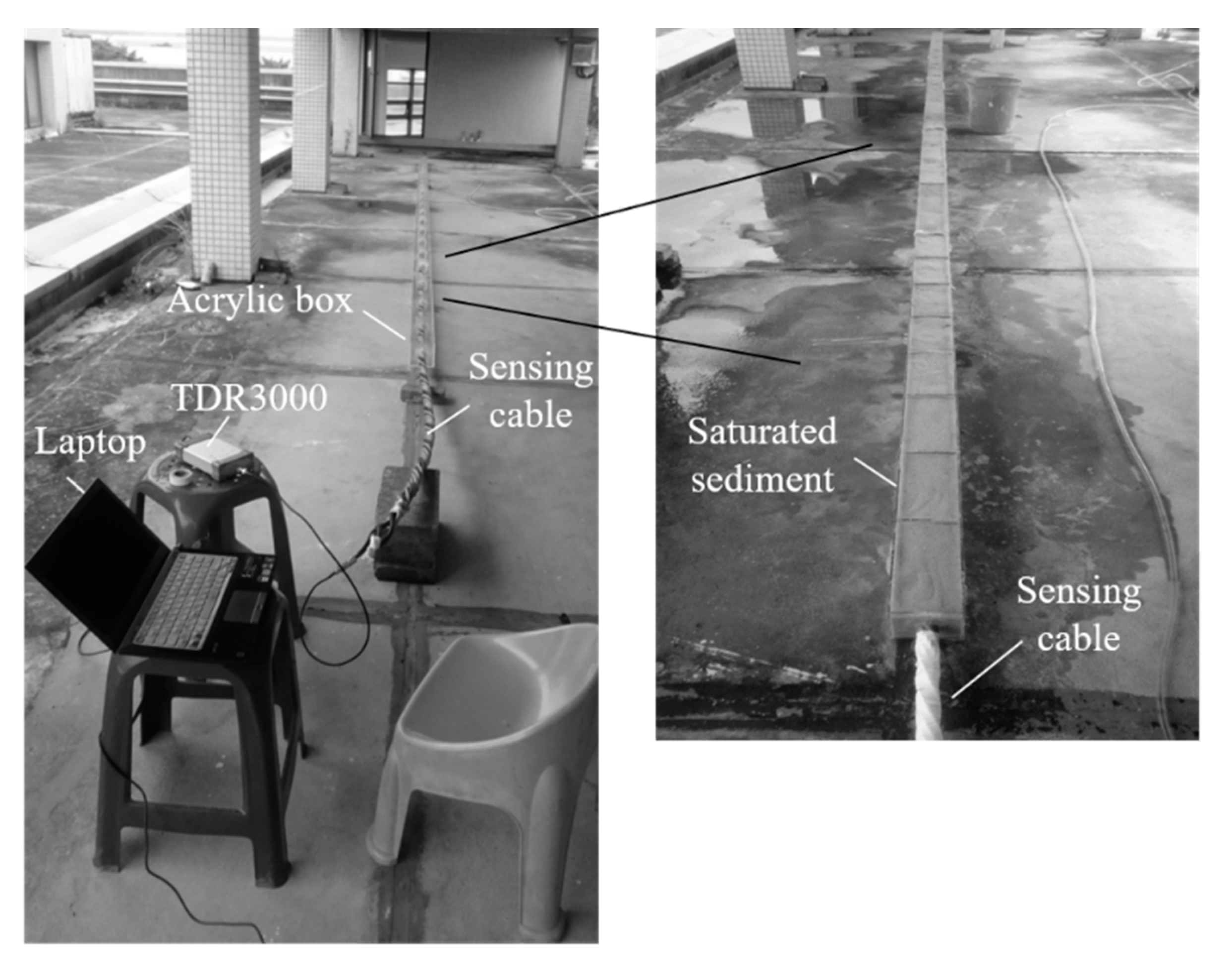
4. Performance of the Improved TDR Sensing Cable in Full Scale
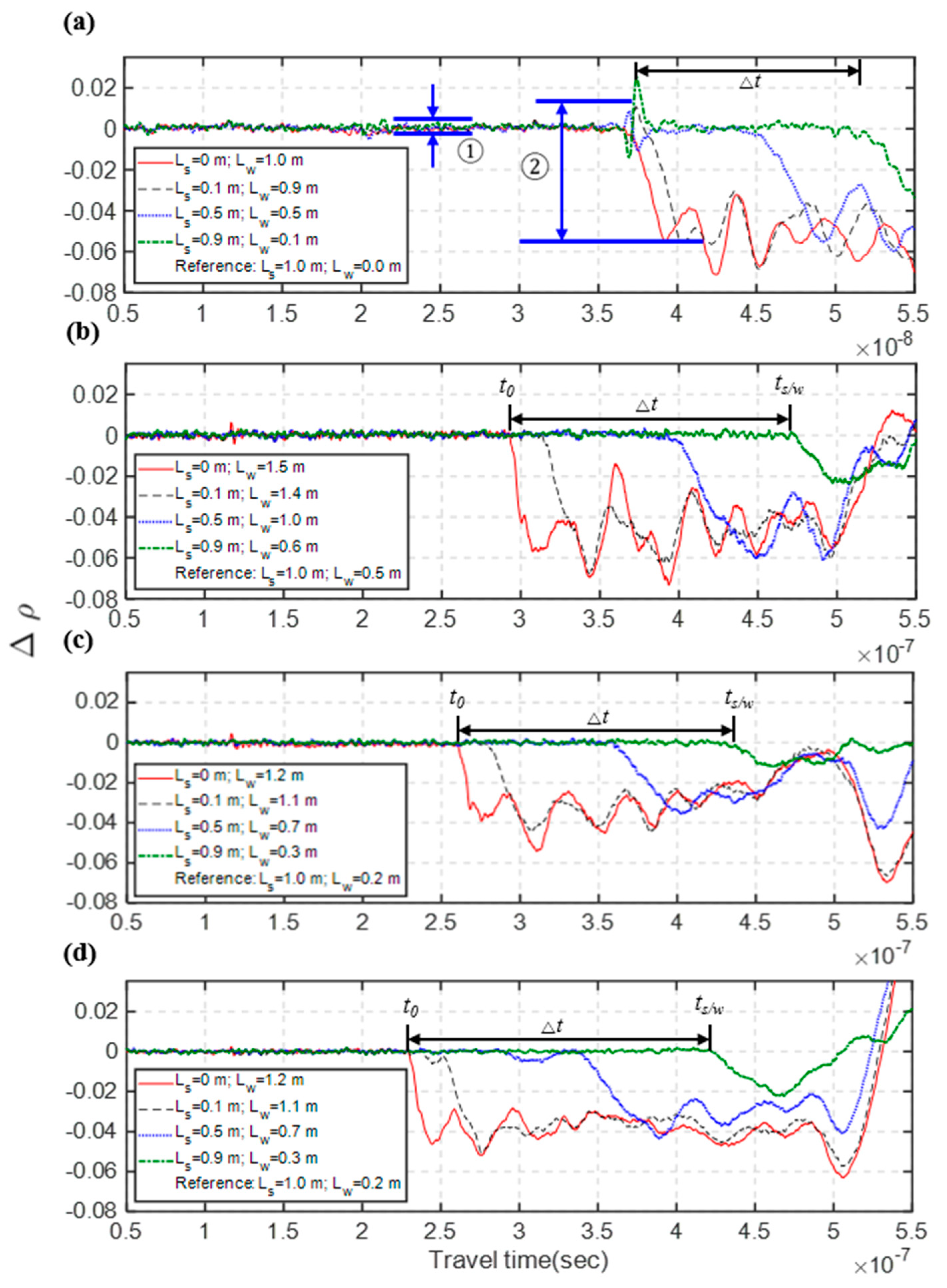
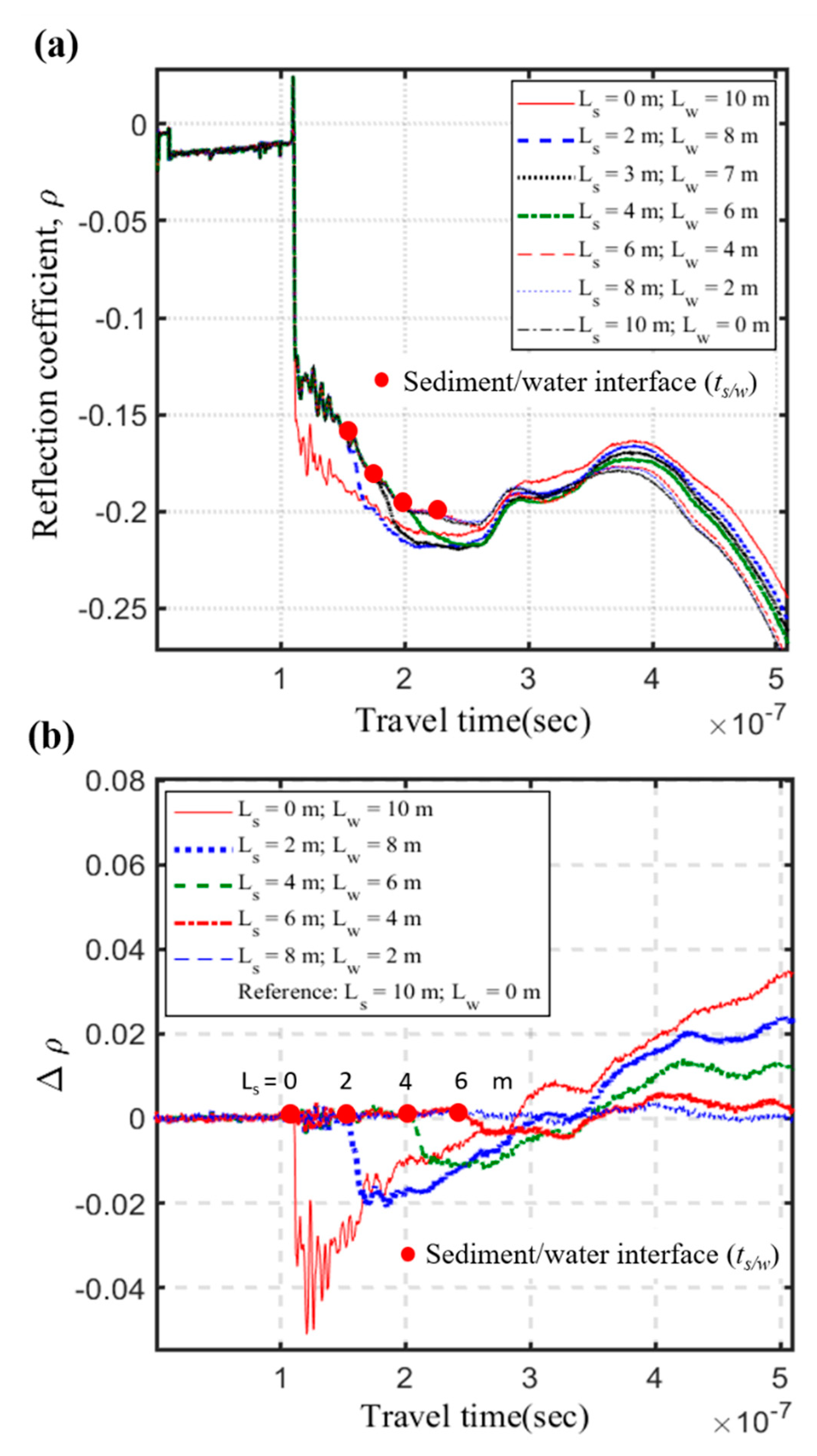
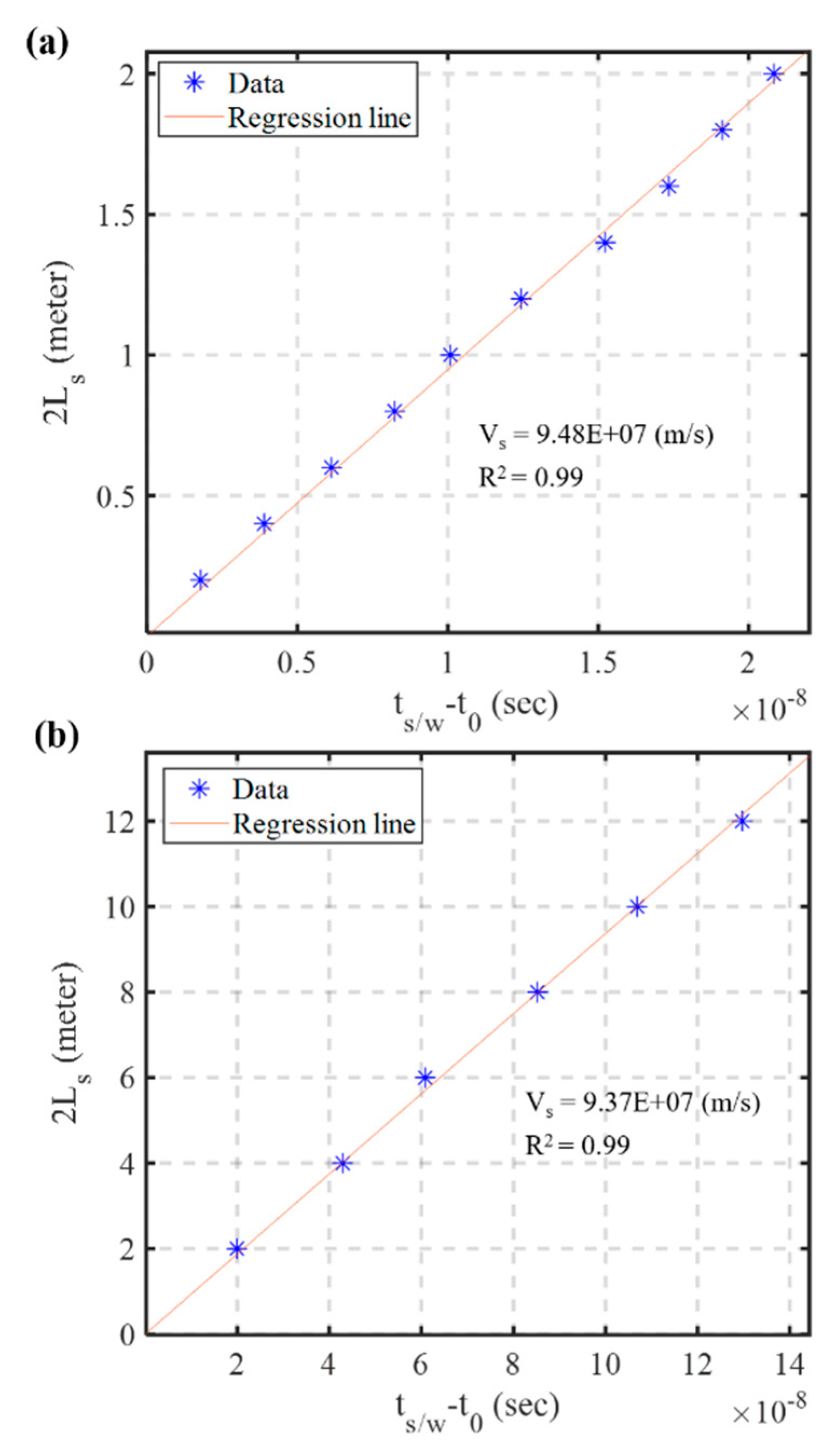
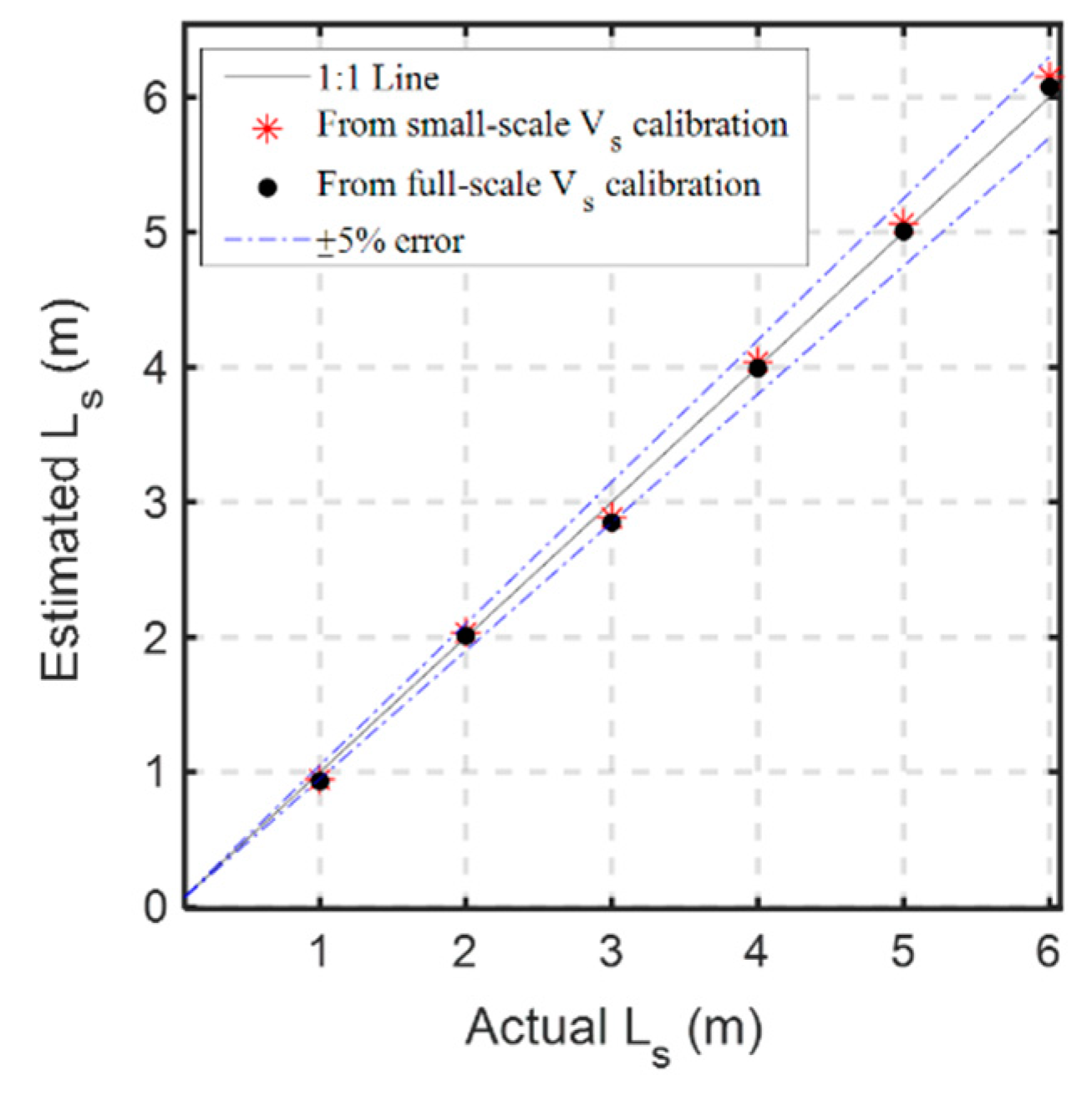
4.1. Accuracy and Sensing Range of Scour Measurement
4.2. Effect of Coating Abrasion and Countermeasure
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Annandale, G.W. Risk analysis of river bridge failure. In Proceedings of the 1993 ASCE Hydraulic Division Conference, San Francisco, CA, USA, 25–30 July 1993; pp. 604–610. [Google Scholar]
- Briaud, J.L.; Ting, F.C.; Chen, H.C.; Gudavalli, R.; Perugu, S.; Wei, G. SRICOS: Prediction of scour rate in cohesive soils at bridge piers. J. Geotech. Geoenviron. Eng. 1999, 125, 237–246. [Google Scholar] [CrossRef]
- Ettouney, M.M.; Alampalli, S. Infrastructure Health in Civil Engineering: Application and Management; CRC Press: Boca Raton, FL, USA; London, UK; New York, NY, USA, 2012. [Google Scholar]
- Boujia, N.; Schmidt, F.; Chevalier, C.; Siegert, D.; Pham Van Bang, D. Distributed Optical Fiber-Based Approach for Soil–Structure Interaction. Sensors 2020, 20, 321. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maroni, A.; Tubaldi, E.; Ferguson, N.; Tarantino, A.; McDonald, H.; Zonta, D. Electromagnetic Sensors for Underwater Scour Monitoring. Sensors 2020, 20, 4096. [Google Scholar] [CrossRef] [PubMed]
- Fitzgerald, P.C.; Malekjafarian, A.; Bhowmik, B.; Prendergast, L.J.; Cahill, P.; Kim, C.-W.; Hazra, B.; Pakrashi, V.; OBrien, E.J. Scour Damage Detection and Structural Health Monitoring of a Laboratory-Scaled Bridge Using a Vibration Energy Harvesting Device. Sensors 2019, 19, 2572. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, C.P.; Wang, K.; Chung, C.C.; Weng, Y.W. New types of time domain reflectometry sensing waveguides for bridge scour monitoring. Smart Mater. Struct. 2017, 26, 075014. [Google Scholar] [CrossRef]
- Lagasse, P.F.; Richardson, E.V.; Schall, J.D.; Price, G.R. Instrumentation for Measuring Scour at Bridge Piers and Abutments, National Cooperative Highway Research Program (NCHRP) Report No. 396; Transportation Research Board: Washington, DC, USA, 1997. [Google Scholar]
- Lu, J.Y.; Hong, J.H.; Su, C.C.; Wang, C.Y.; Lai, J.S. Field measurements and simulation of bridge scour depth variations during floods. J. Hydraul. Eng. 2008, 134, 810–821. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.A.; Atamturktur, H.S. Real Time Measurement of Scour Depths around Bridge Piers and Abutments, No. FHWA-SC-14-05; Clemson University: Clemson, SC, USA, 2015. [Google Scholar]
- Dowding, C.H.; Pierce, C.E. Use of time domain reflectometry to detect bridge scour and monitor pier movement. In Proceedings of the Symposium on Time Domain Reflectometry in Environmental, Infrastructure, and Mining Applications, Evanston, IL, USA, 7–9 September 1994; pp. 7–9. [Google Scholar]
- Yankielun, N.E.; Zabilansky, L. Laboratory investigation of time-domain reflectometry system for monitoring bridge scour. J. Hydraul. Eng. 1999, 125, 1279–1284. [Google Scholar] [CrossRef]
- Yu, X.B.; Zhang, B.; Tao, J.; Yu, X. A new time-domain reflectometry bridge scour sensor. Struct. Health Monit. 2013, 12, 99–113. [Google Scholar] [CrossRef]
- Gao, Q.; Yu, X.B. Design and evaluation of a high sensitivity spiral TDR scour sensor. Smart Mater. Struct. 2015, 24, 085005. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Lin, C.P.; Chung, C.C. A bundled time domain reflectometry-based sensing cable for monitoring of bridge scour. Struct. Contr. Health Monit. 2019, 26, e2345. [Google Scholar] [CrossRef]
- Wang, K.; Lin, C.P. Applicability and limitations of time domain reflectometry bridge scour monitoring system in general field conditions. Struct. Health Monit. 2020. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef] [Green Version]
- O’Connor, K.M.; Dowding, C.H. Geomeasurements by Pulsing TDR Cables and Probes; CRC Press: Boca Raton, FL, USA; London, UK; New York, NY, USA, 1999. [Google Scholar]
- Robinson, D.A.; Jones, S.B.; Wraith, J.M.; Or, D.; Friedman, S.P. A review of advances in dielectric and electrical conductivity measurement in soils using time domain reflectometry. Vadose Zone J. 2003, 2, 444–475. [Google Scholar] [CrossRef]
- Lin, C.P.; Tang, S.H. Comprehensive wave propagation model to improve TDR interpretations for geotechnical applications. Geotech. Test. J. 2006, 30, 90–97. [Google Scholar]
- Zegelin, S.J.; White, I.; Jenkins, D.R. Improved field probes for soil water content and electrical conductivity measurement using time domain reflectometry. Water Resour. Res. 1989, 25, 2367–2376. [Google Scholar]
- Knight, J.H. Sensitivity of time domain reflectometry measurements to lateral variations in soil water content. Water Resour. Res. 1992, 28, 2345–2352. [Google Scholar] [CrossRef]
- Baker, J.M.; Lascano, R.J. The spatial sensitivity of time-domain reflectometry. Soil Sci. 1989, 147, 378–384. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Type | Effect of Environmental Conditions | Continuous Real-Time Monitoring | Deposition Process | Durability | ||
|---|---|---|---|---|---|---|
| Temperature | Salinity | Turbidity | ||||
| Mechanical sounding rod | No | No | No | No | Yes | Medium |
| Dropping weight | No | No | No | No | Yes | High |
| Magnetic Sliding Collar (MSC) | No | No | No | Yes | No | Low |
| Electrode device | Require remedy | High | High | Yes | Yes | Low |
| Fiber Bragg Grating (FBG) | High | No | No | Yes | Yes | Medium |
| Vibration-based turbulent pressure sensors (VTPs) | No | No | No | Yes | Yes | Medium |
| Dissolved oxygen probes (DO) | High | Unknown | Minor | Yes | Yes | Unknown |
| Piezoelectric film | No | No | No | Yes | Yes | Medium |
| Temperature based heat pulse method | High | No | High | No | Yes | Unknown |
| Amplitude Domain Reflectometry (ADR) | Require remedy | High | Minor | Yes | Yes | Unknown |
| Time Domain Reflectometry (TDR) | Require remedy | High | Minor | Yes | Yes | Medium |
| Acoustic Doppler Current Profiler (ADCP) | Minor | Minor | High | No | Yes | High |
| Sonar | Require remedy | Require remedy | High | Yes | Yes | Medium |
| Ground Penetrating Radar (GPR) | Minor | High | High | No | Yes | High |
| Non-intrusive structural vibration monitoring | No | No | No | Yes | Yes | High |
| Numbered brick | No | No | No | No | No | High |
| Float out device | No | No | No | Yes | No | High |
| Smart rocks | No | No | No | Yes | No | High |
| Waveguide Type | SNR | Travel Time Per 1.0 m Sand (10−8 s) | Apparent Ka |
|---|---|---|---|
| Balanced design | |||
| Original type | 10.69 | 1.661 | 6.21 |
| Type I | 19.04 | 2.012 | 9.11 |
| Unbalanced design | |||
| Type II | 26.75 | 2.027 | 9.24 |
| Type III § | 32.37 | 2.155 | 10.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Lin, C.-P.; Jheng, W.-H. A New TDR-Based Sensing Cable for Improving Performance of Bridge Scour Monitoring. Sensors 2020, 20, 6665. https://doi.org/10.3390/s20226665
Wang K, Lin C-P, Jheng W-H. A New TDR-Based Sensing Cable for Improving Performance of Bridge Scour Monitoring. Sensors. 2020; 20(22):6665. https://doi.org/10.3390/s20226665
Chicago/Turabian StyleWang, Kai, Chih-Ping Lin, and Wei-Hao Jheng. 2020. "A New TDR-Based Sensing Cable for Improving Performance of Bridge Scour Monitoring" Sensors 20, no. 22: 6665. https://doi.org/10.3390/s20226665
APA StyleWang, K., Lin, C. -P., & Jheng, W. -H. (2020). A New TDR-Based Sensing Cable for Improving Performance of Bridge Scour Monitoring. Sensors, 20(22), 6665. https://doi.org/10.3390/s20226665