Effect Evaluation of Spatial Characteristics on Map Matching-Based Indoor Positioning



Abstract
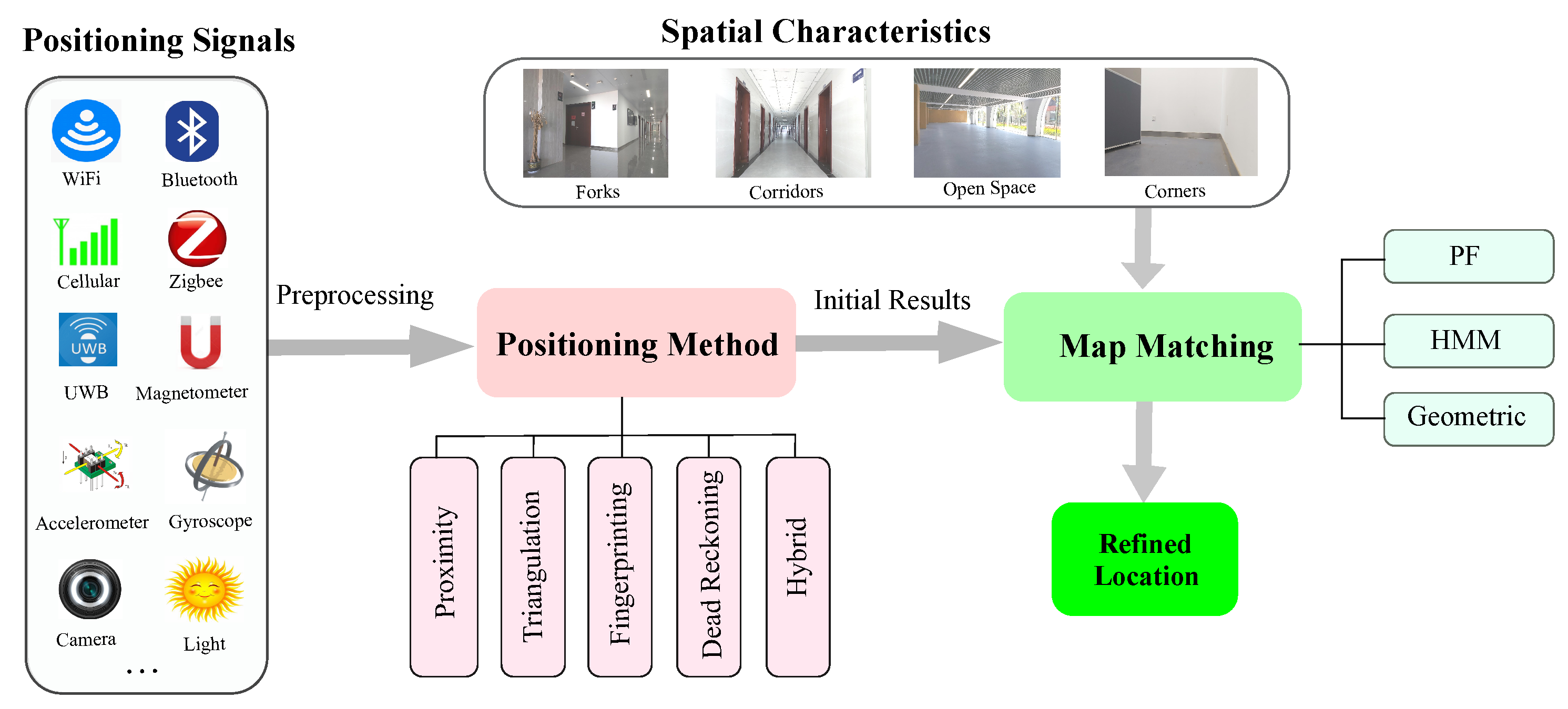
:1. Introduction
2. Map Matching Methods of Interest
2.1. Particle Filtering
- Initialization. Draw N particles according to the proposal probability function. and are the coordinates of the i-th particle, and is the initial weight of the particle which is assigned by a value of .
- Prediction. Calculate the state at the k-th step for each particle according to the state model.
- Weight update. Update the weights of particles using the spatial or other constraints. For example, the weight of a particle will be set to zero when it crosses obstacles (e.g., walls). When the Wi-Fi fingerprinting is integrated into the PF, the particles that are closer to the estimated results from the Wi-Fi fingerprinting will be assigned larger weights. After this, the weights of particles are normalized by
- State estimate. The location of the user is obtained according to the position of each surviving particle and their weight , namely
- Resampling. Re-sampling is a way to avoid the degeneracy problem, i.e., that most importance weights are close to zero. More specifically, when the effective number of particle (denoted by ) is below a threshold (), namely , then the following re-sampling operations are performed: (1) Draw N particles from the current particle set with probabilities proportional to their weights; (2) replace the current particle set with the new one; (3) set for all particles.
2.2. Hidden Markov Models
2.3. Geometric Method
3. Theoretical Analysis of Spatial Characteristics for Map Matching
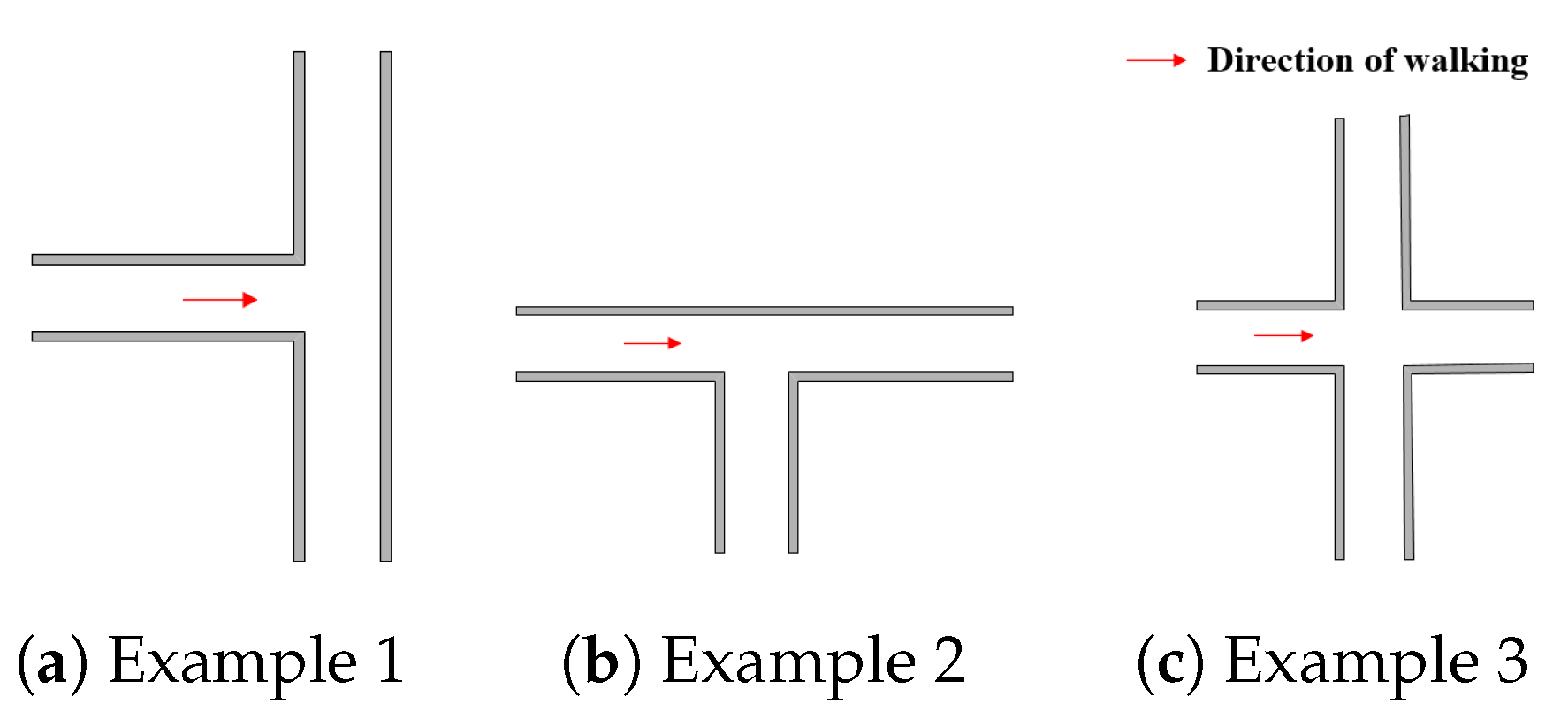
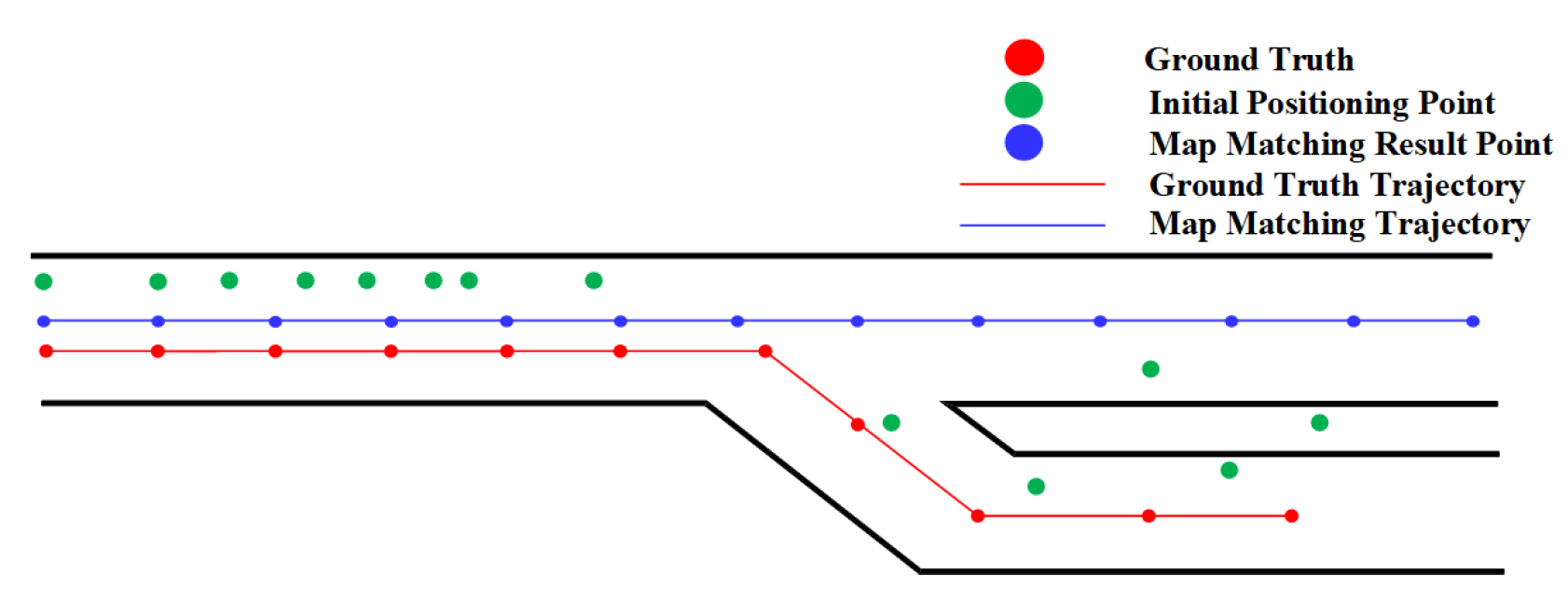
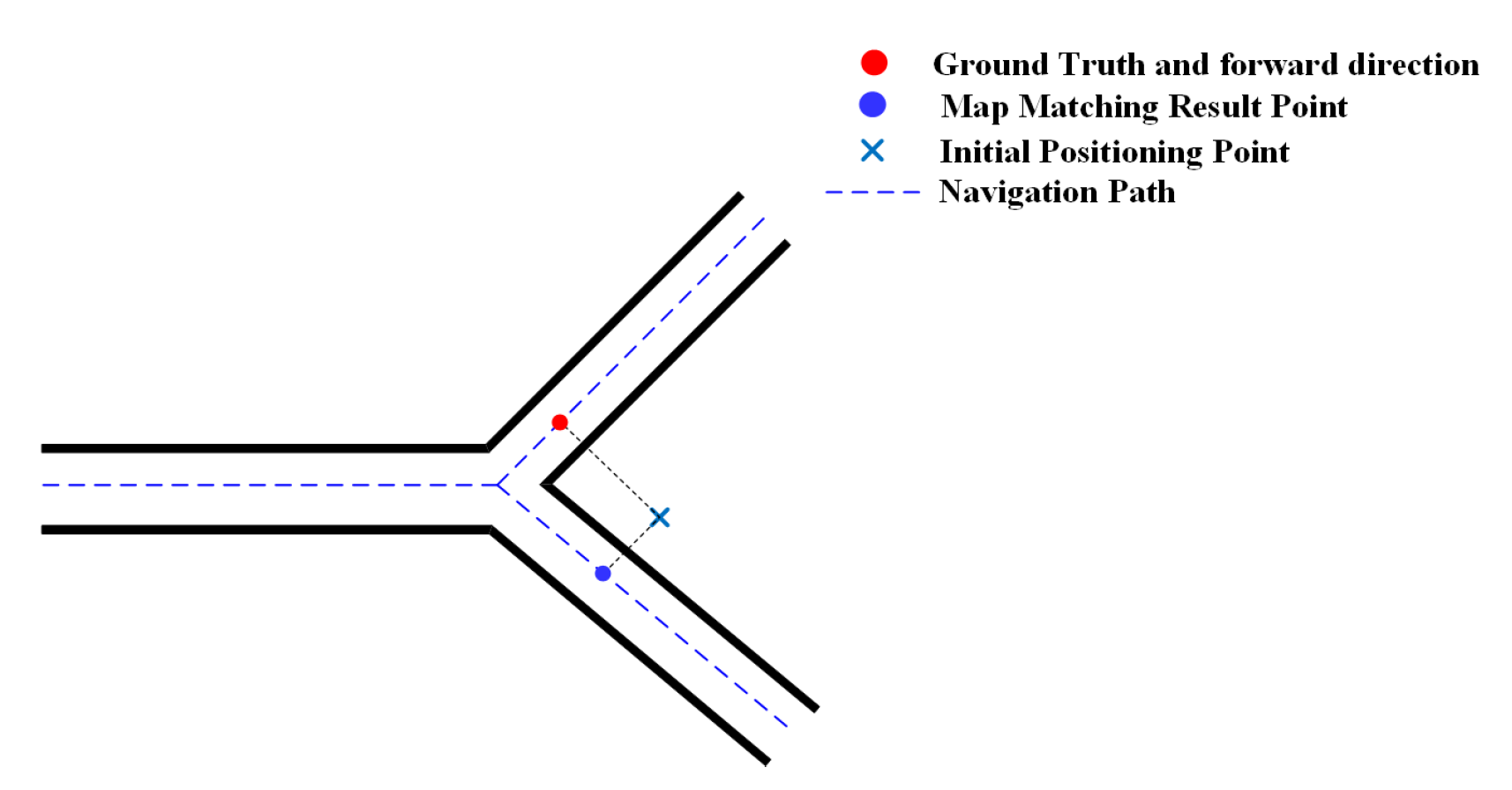
3.1. Fork
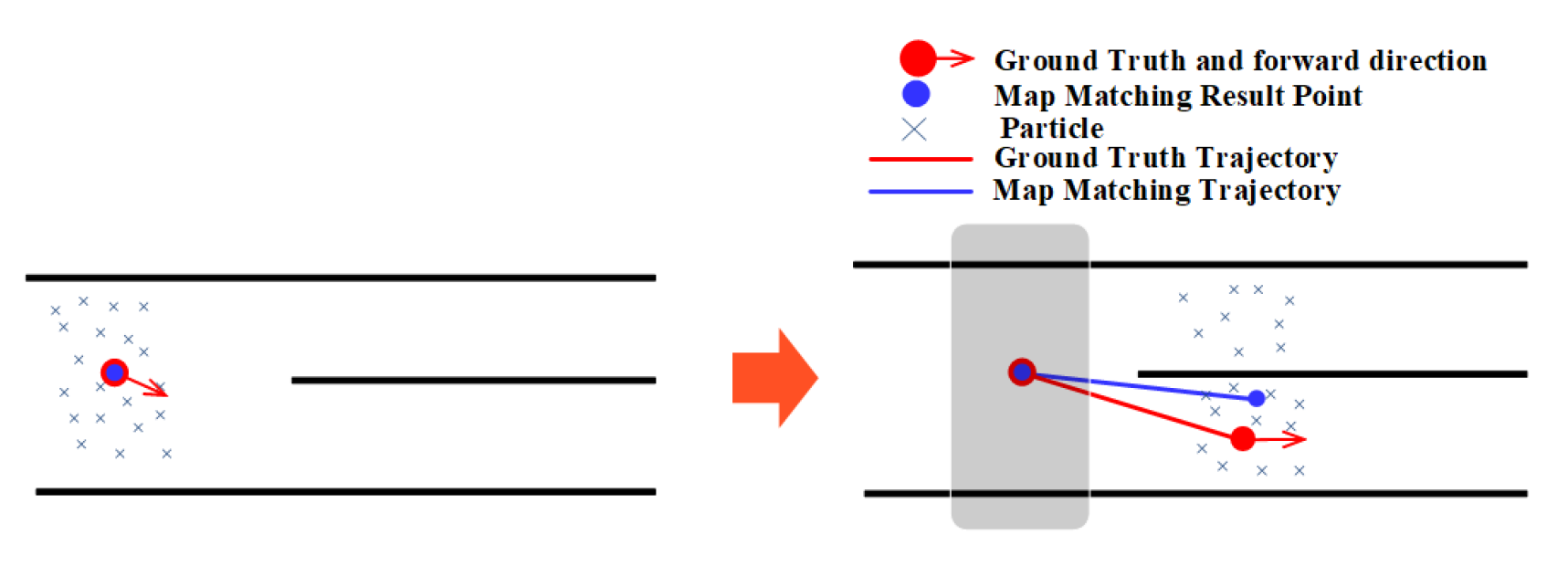
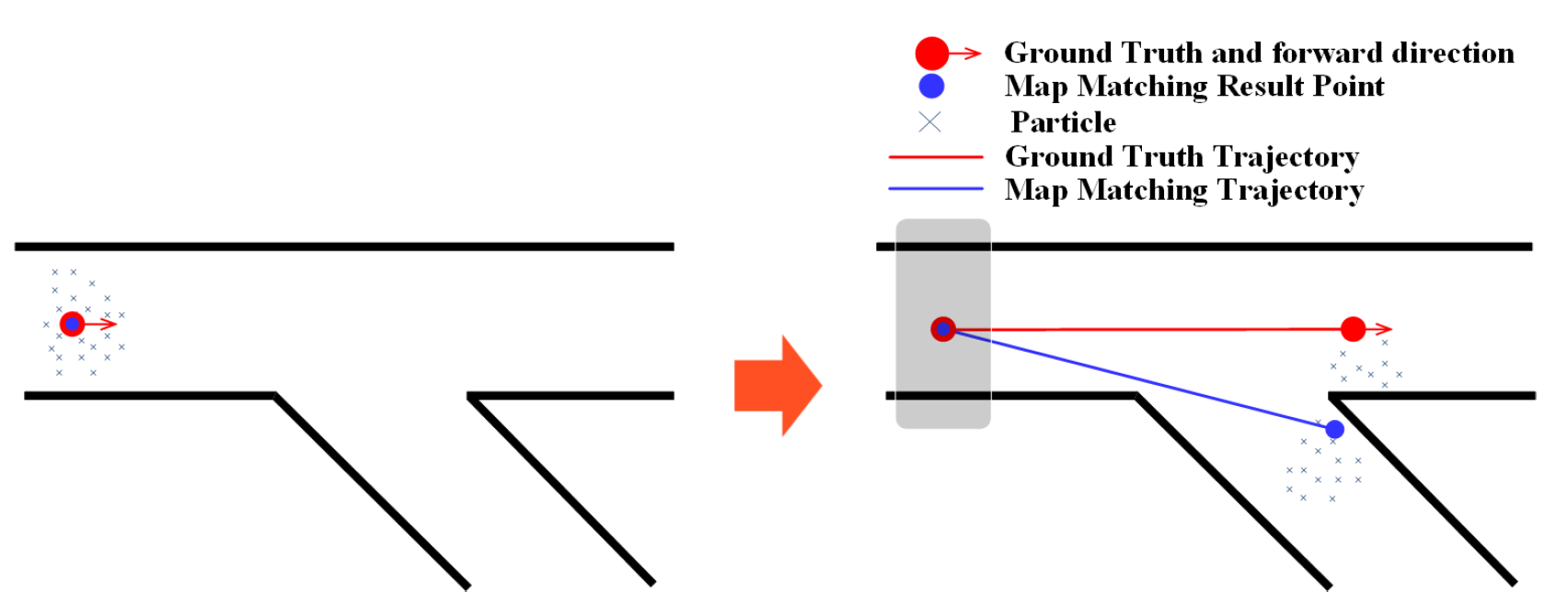
3.2. Open Space
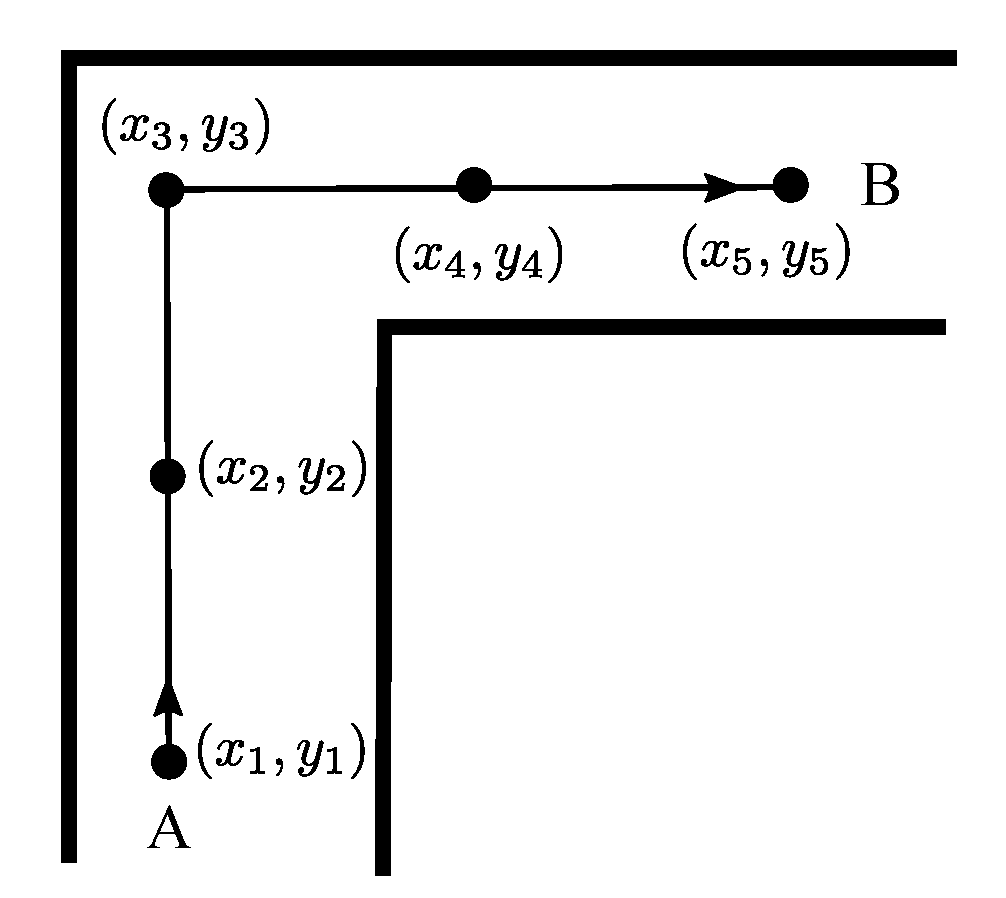
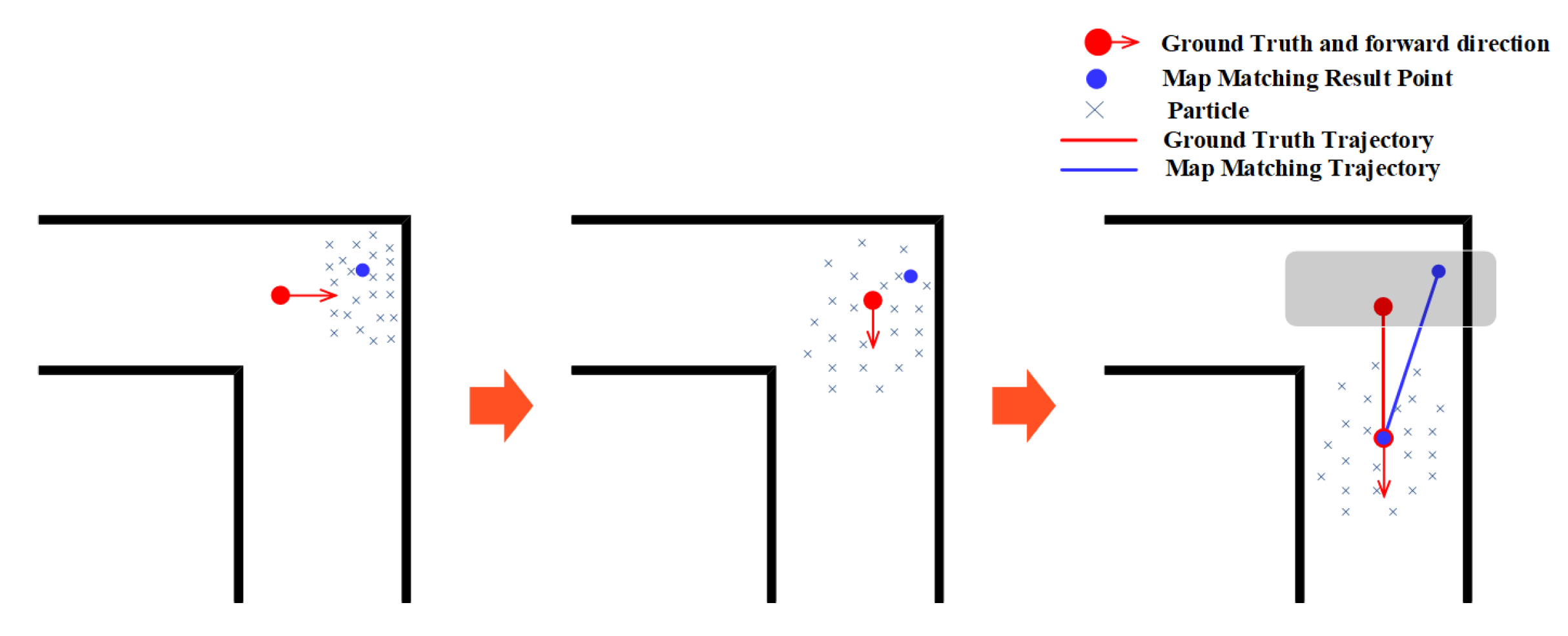
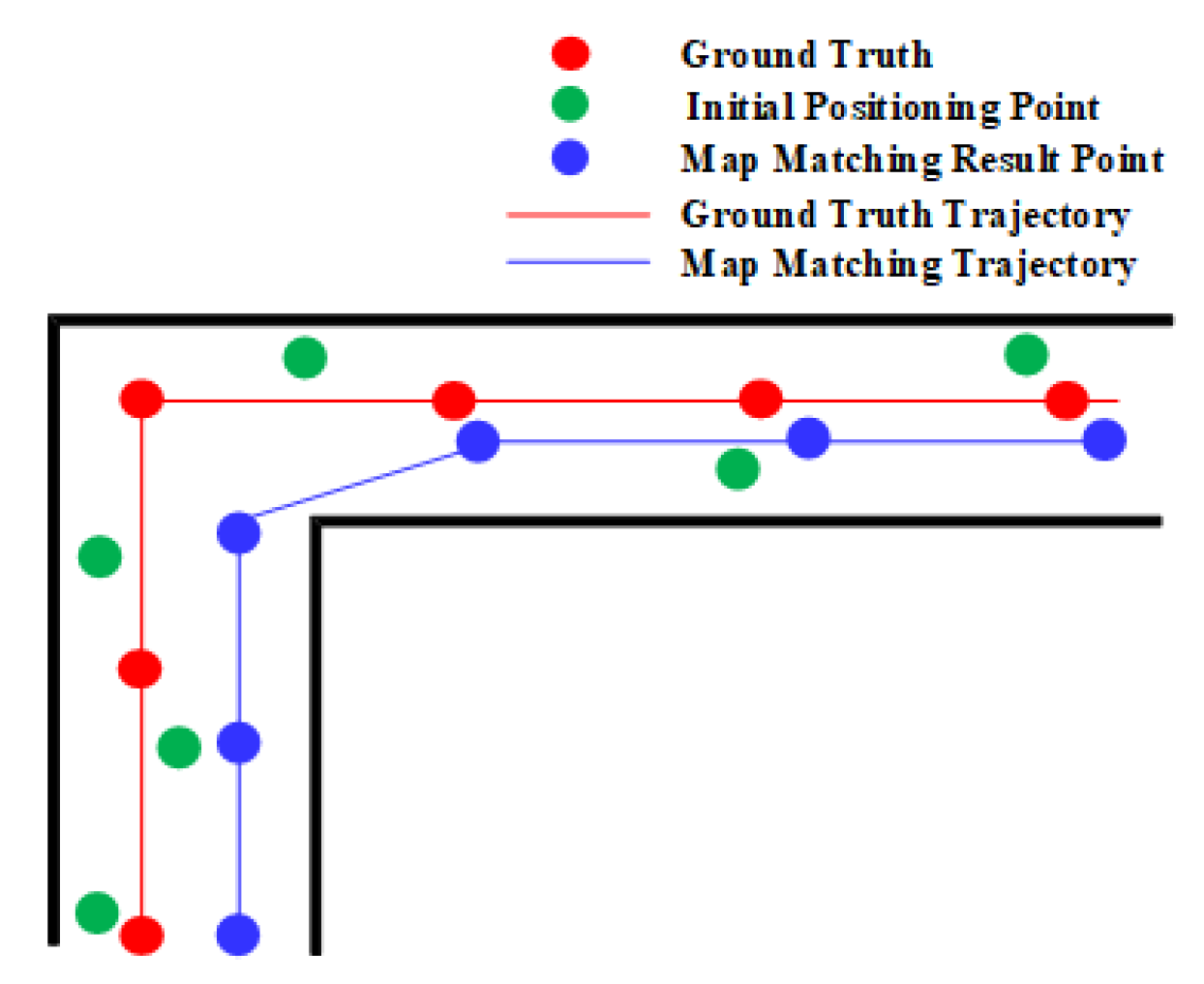
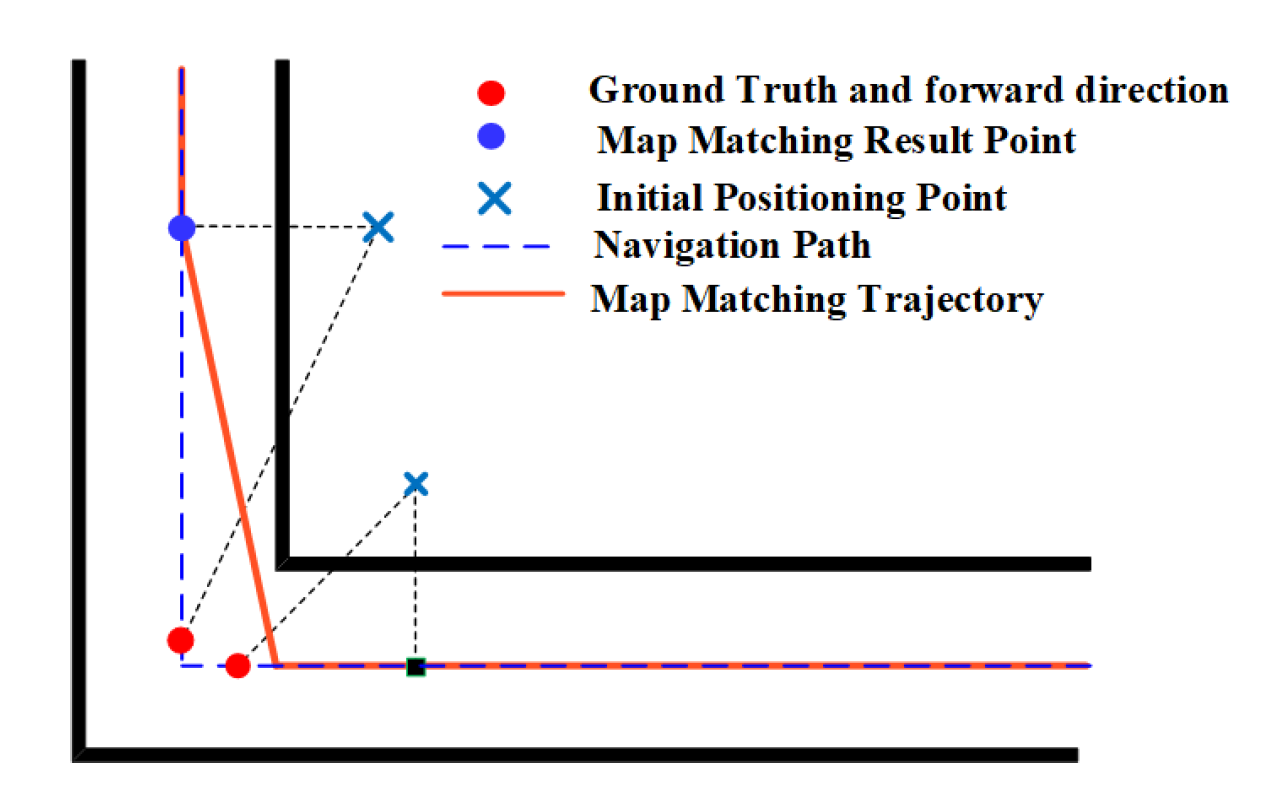
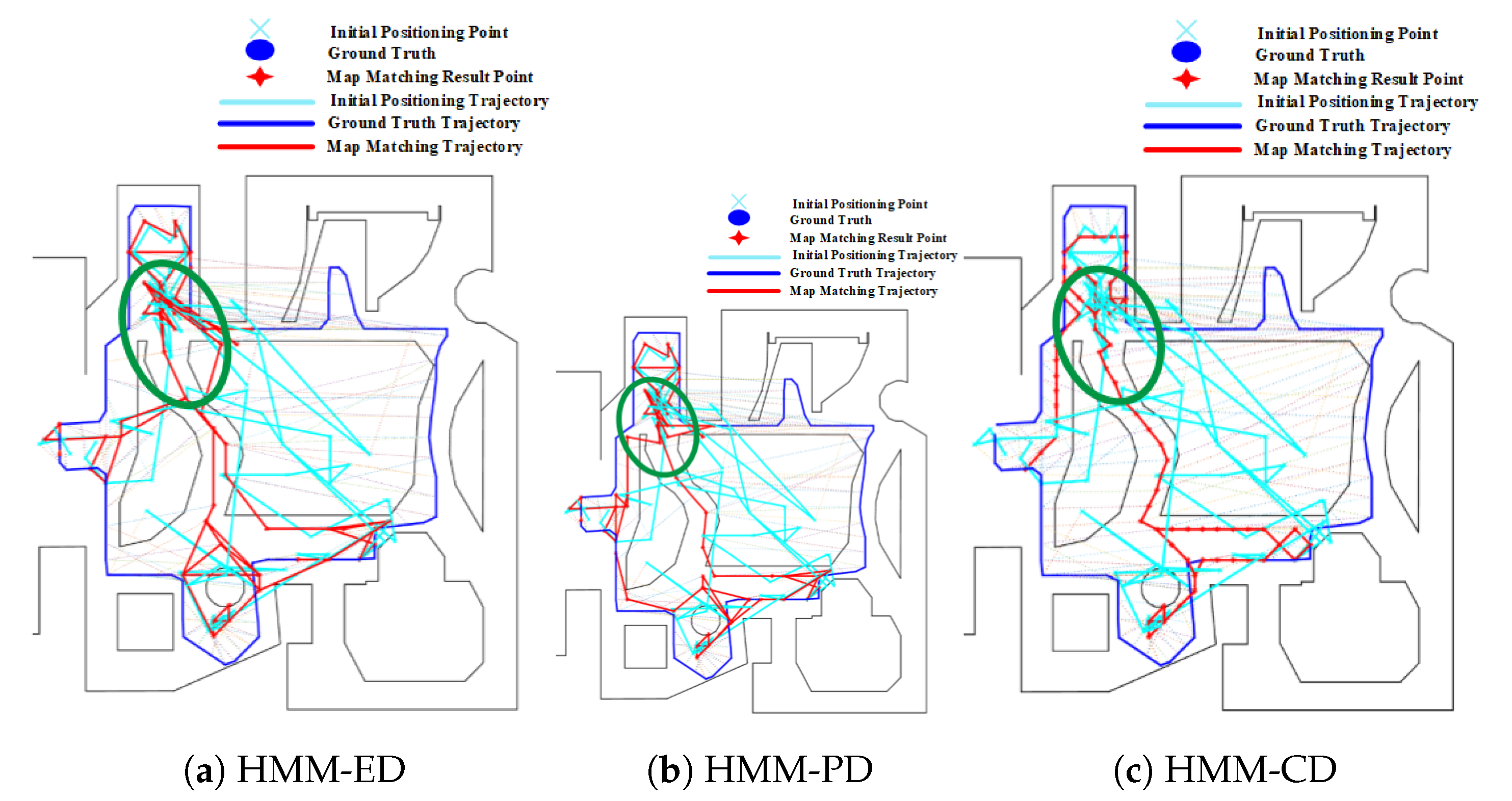
3.3. Corner
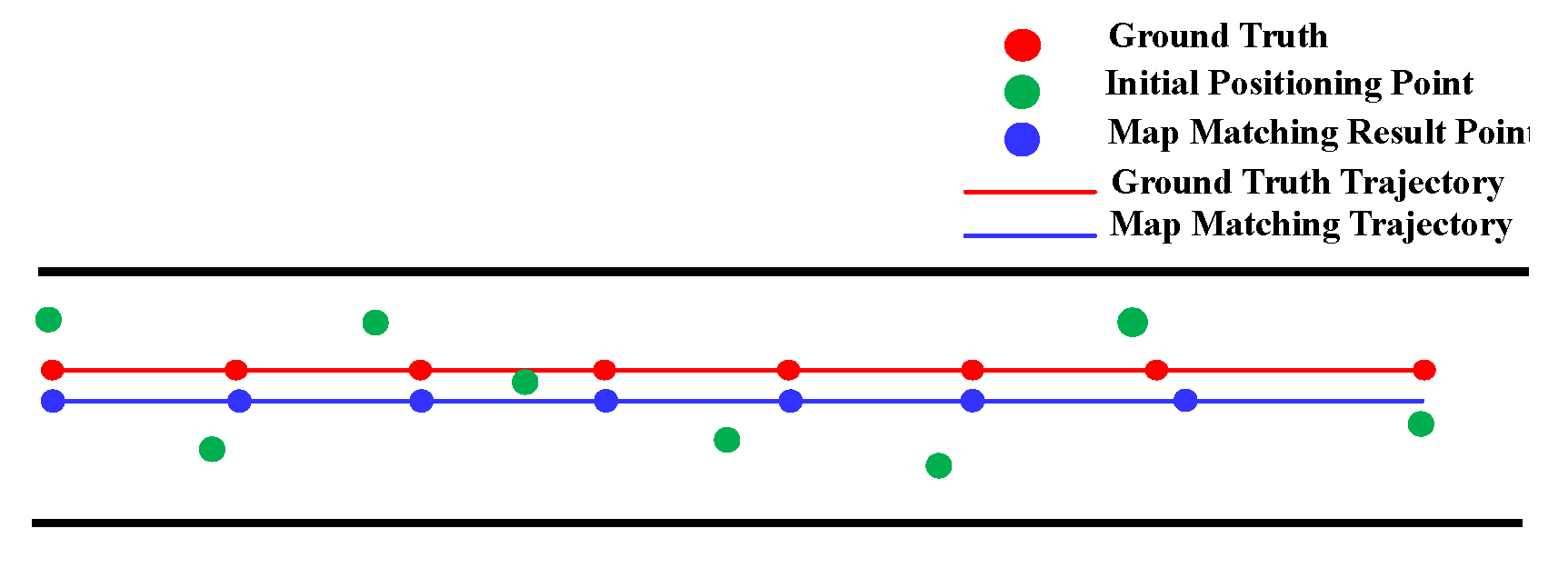
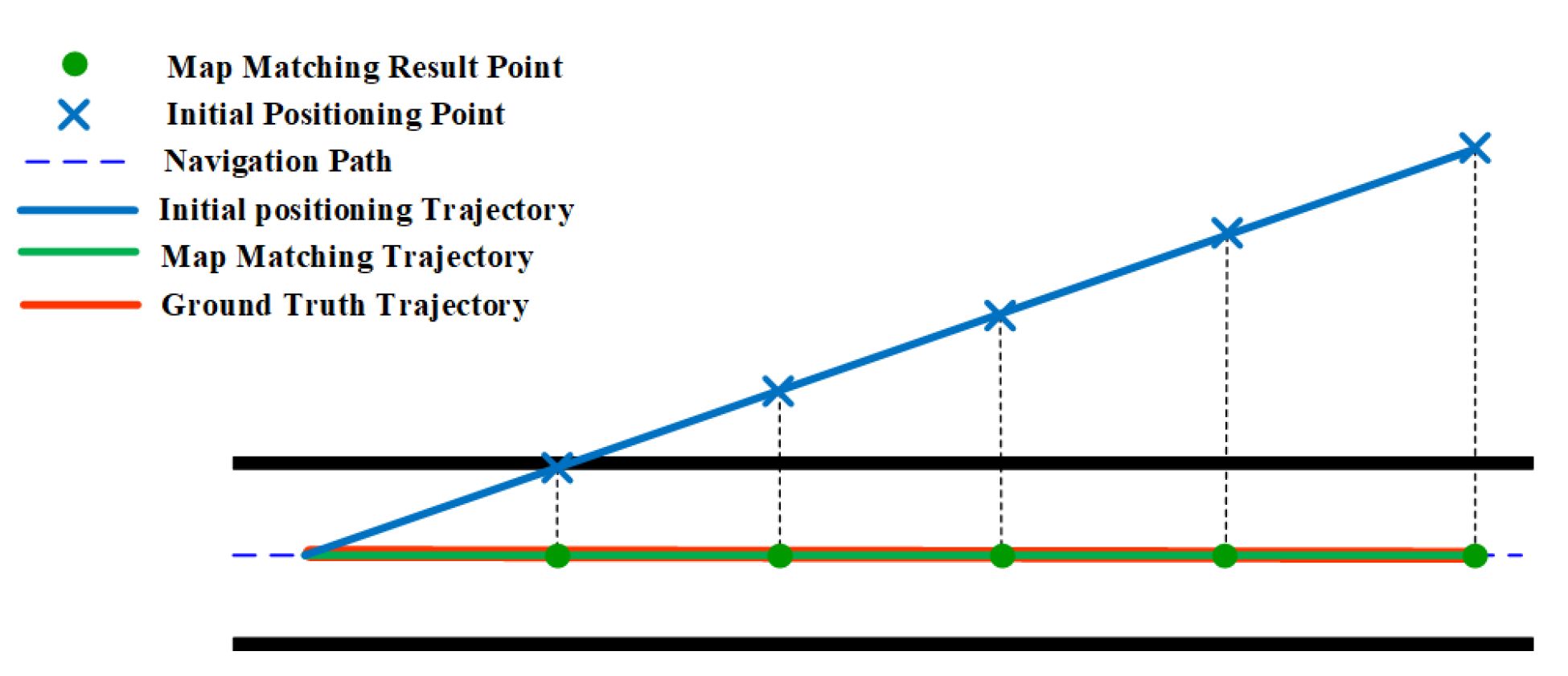
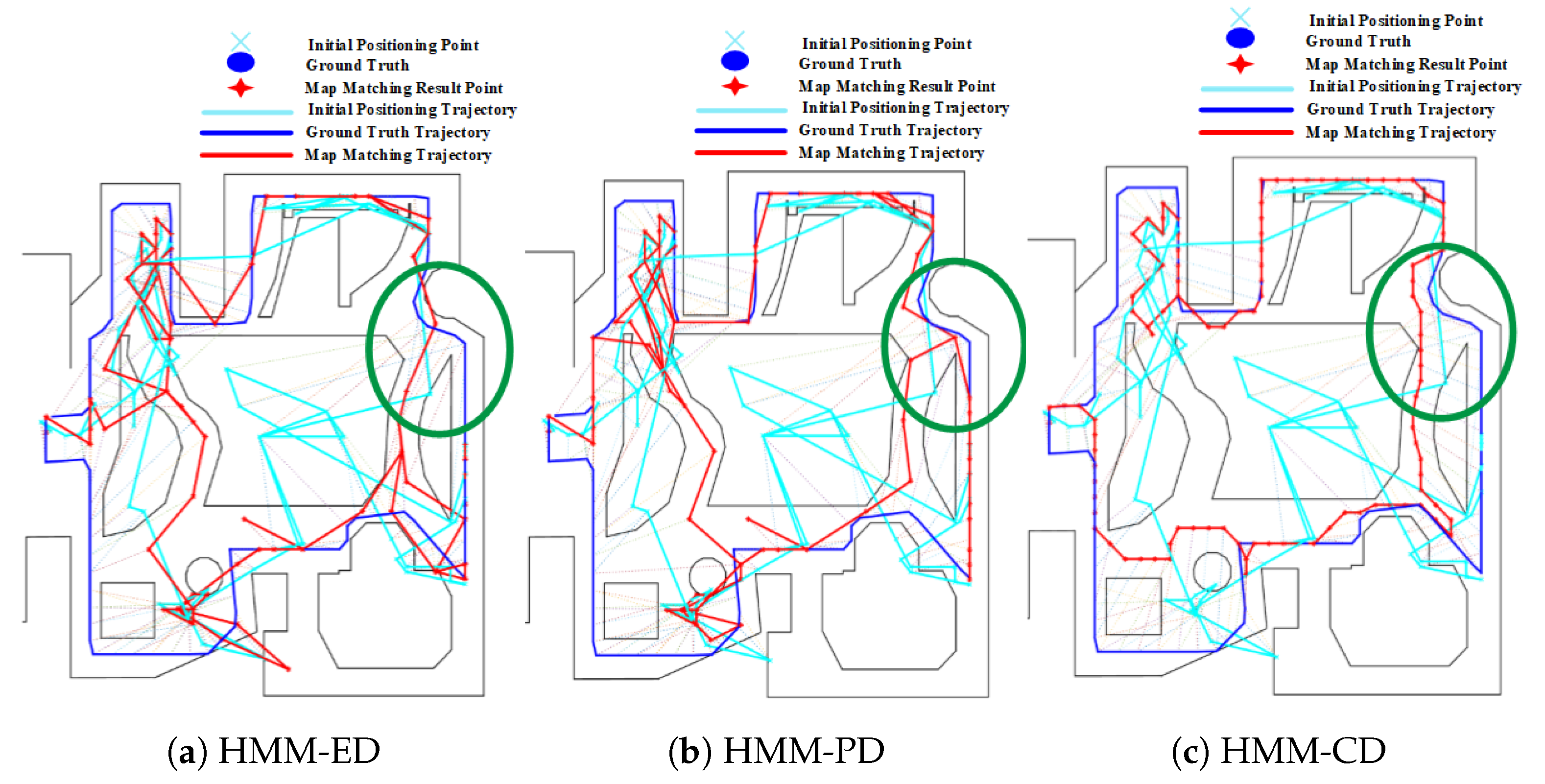
3.4. Narrow Corridor
4. Experiments and Results
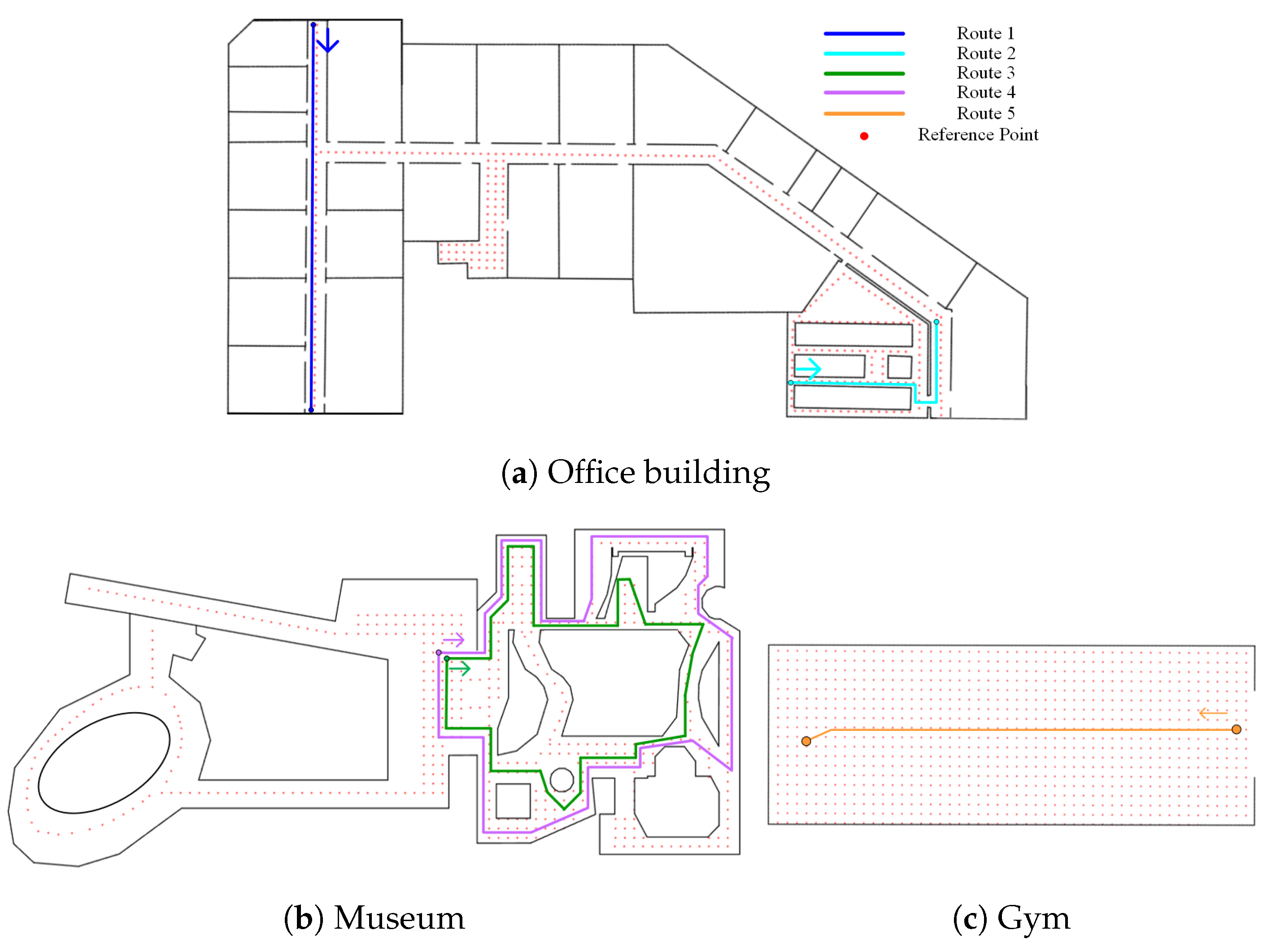
4.1. Experiment Setup
4.2. Algorithm Implementation
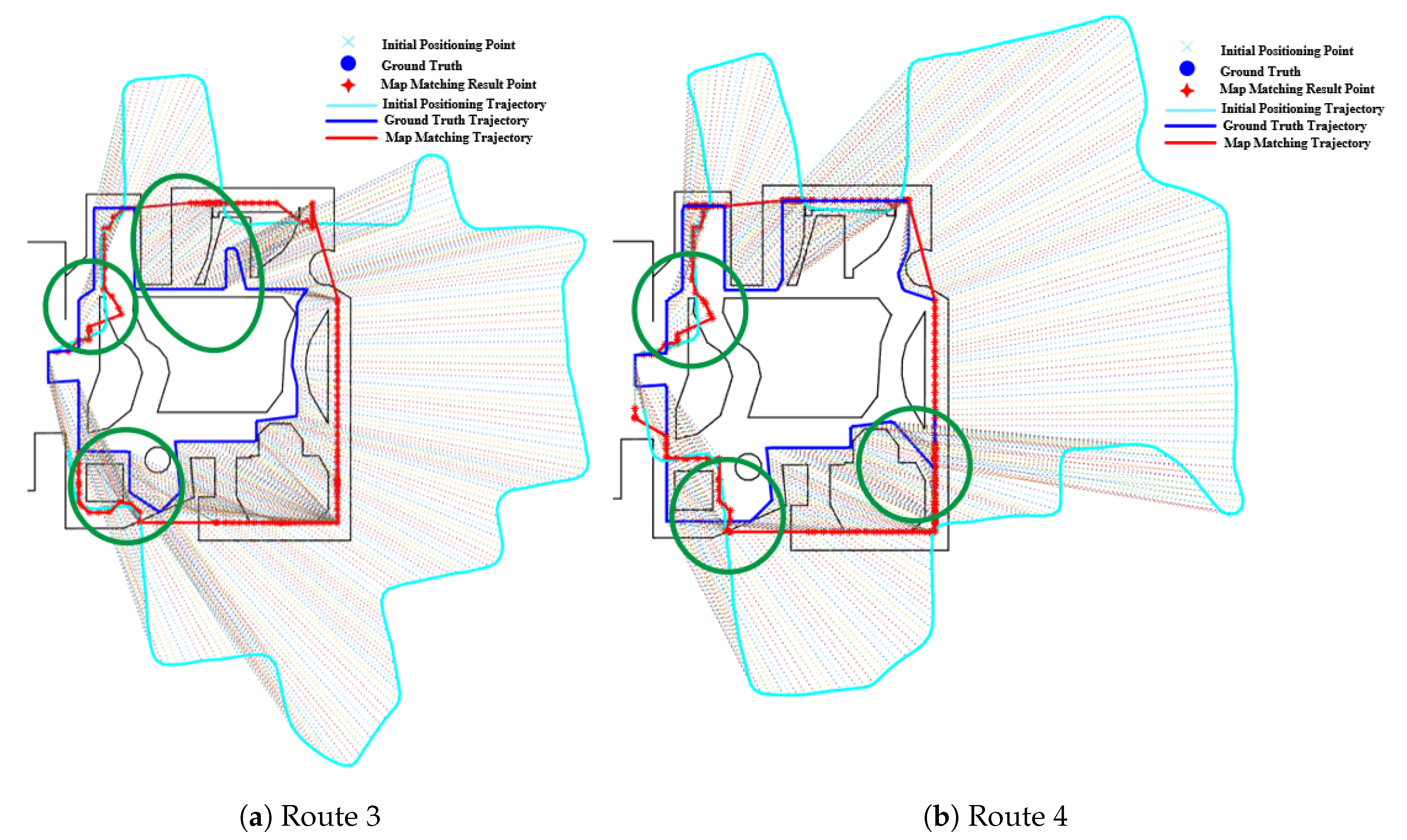
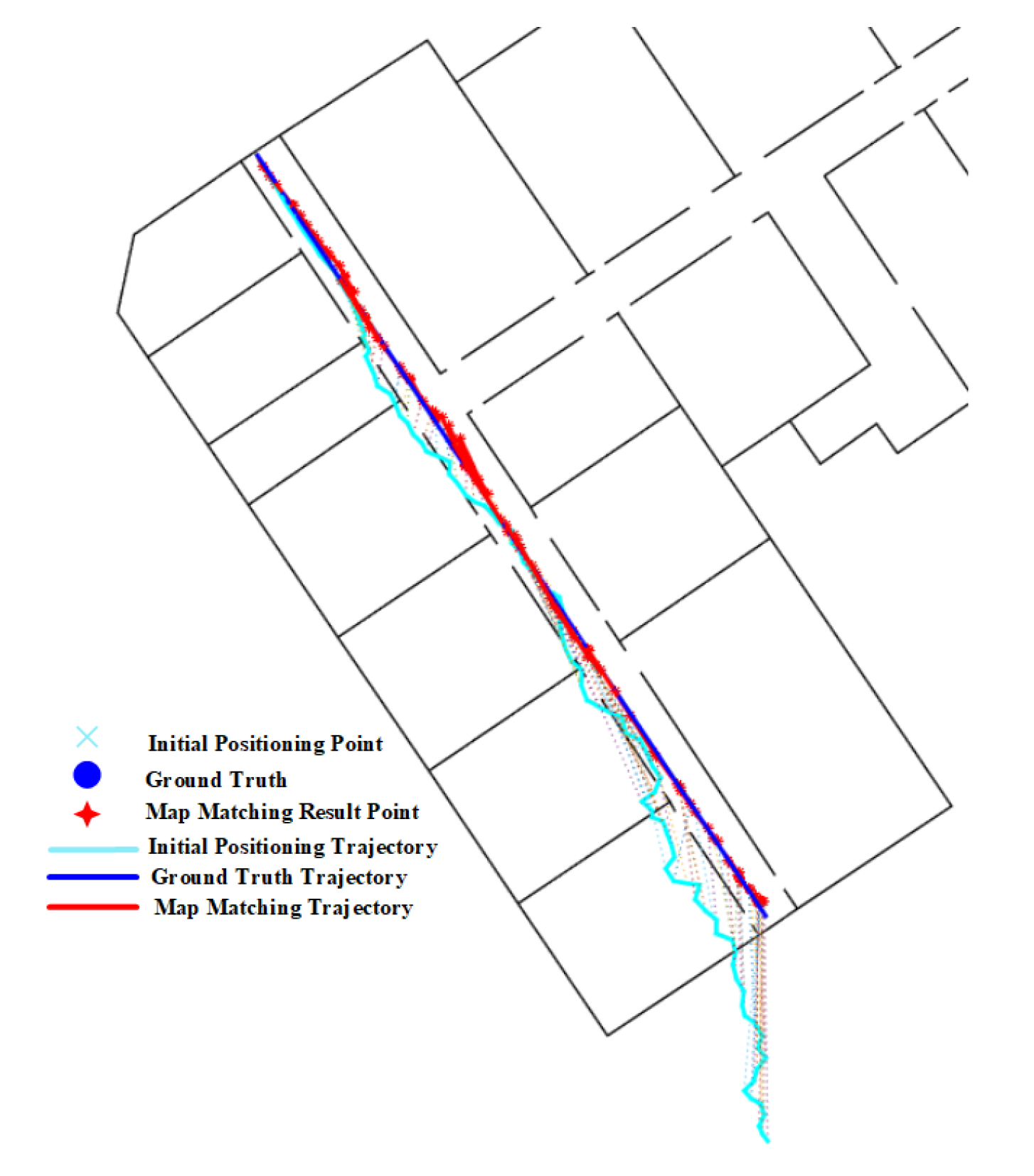
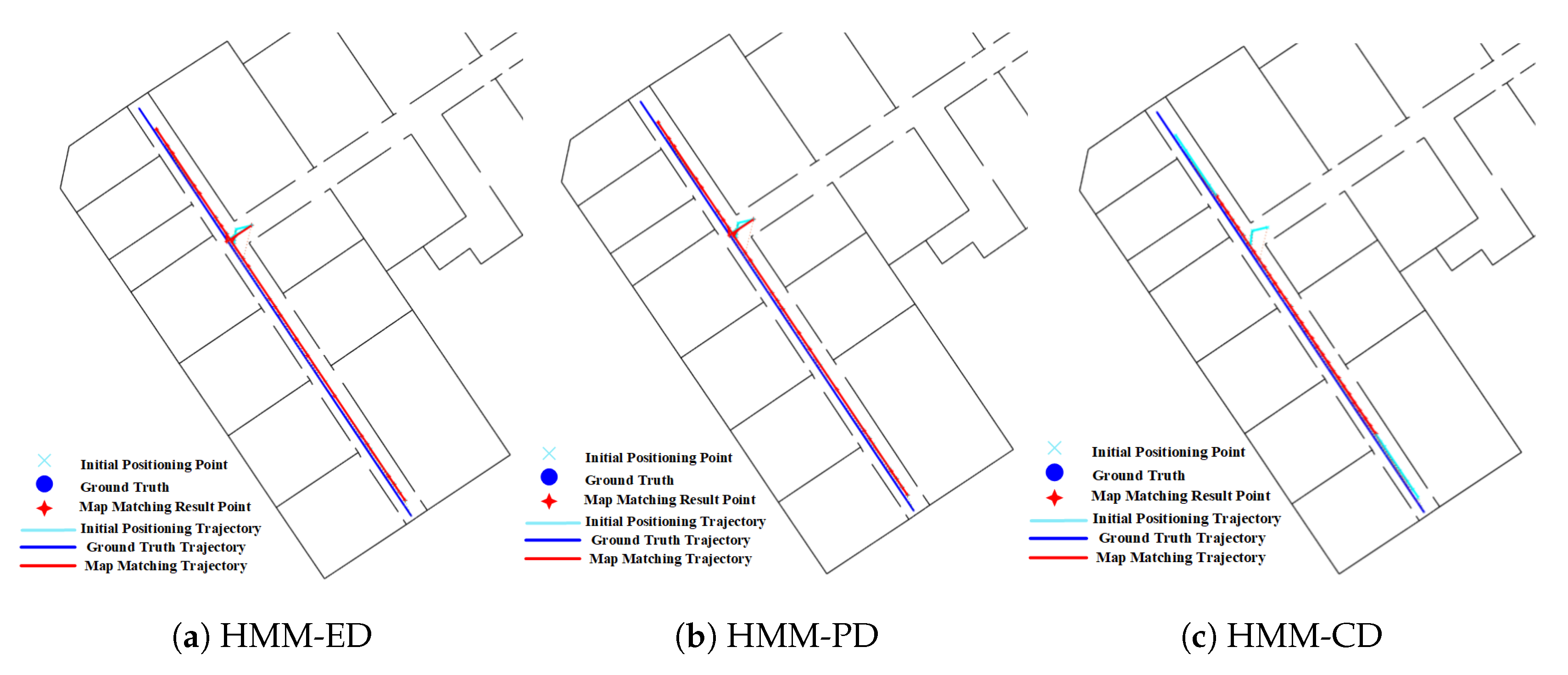
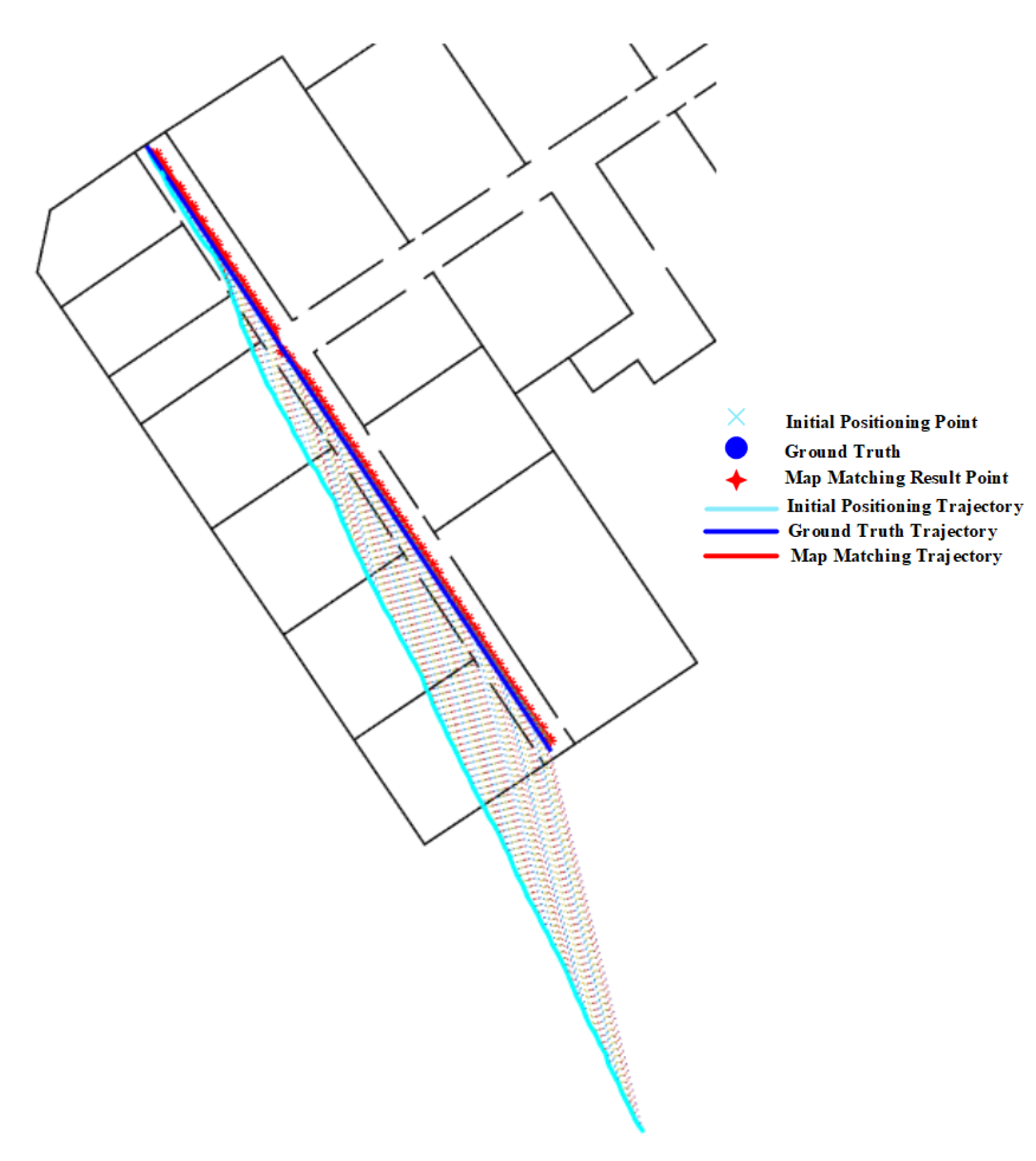
4.3. Overall Positioning Results
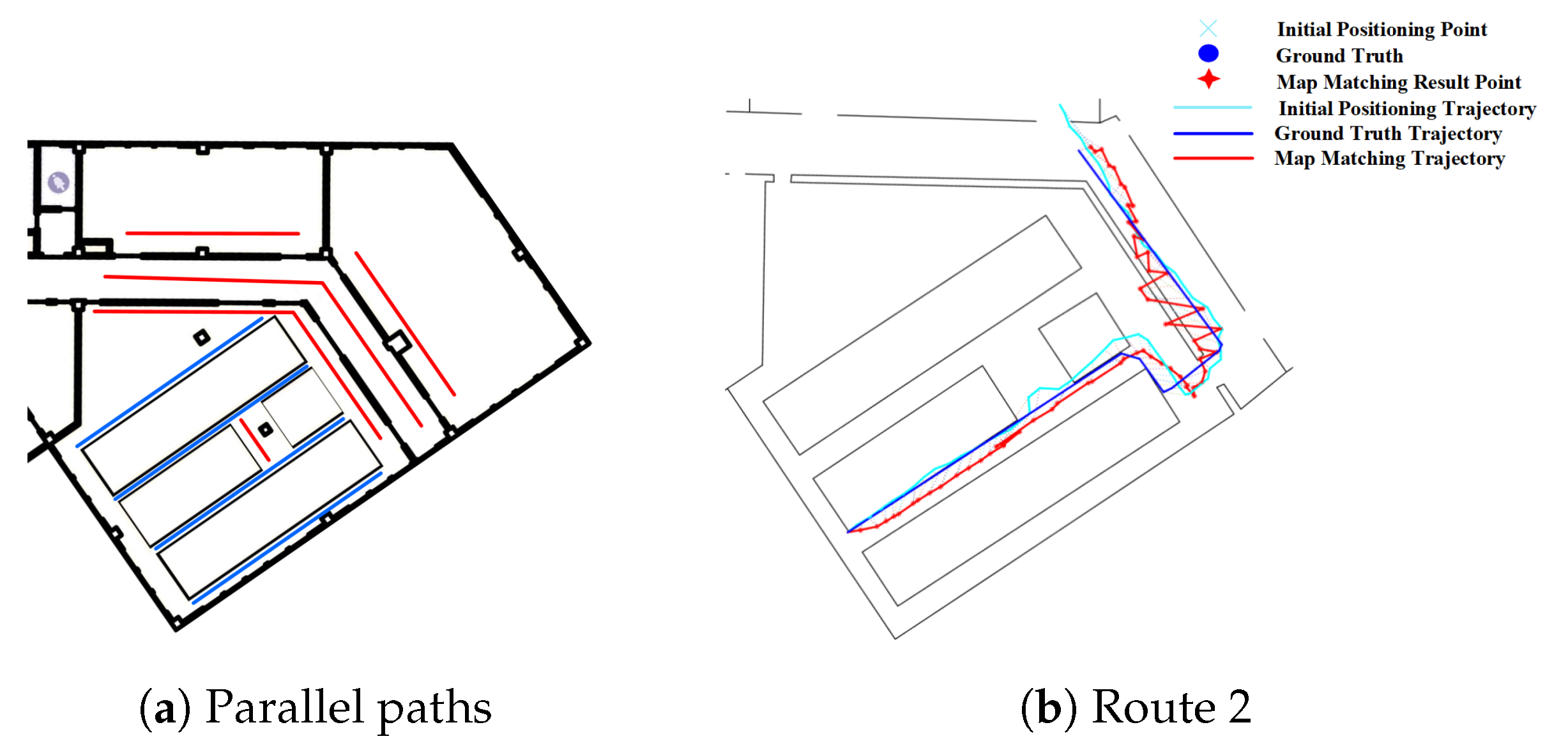
4.4. Effect of Fork
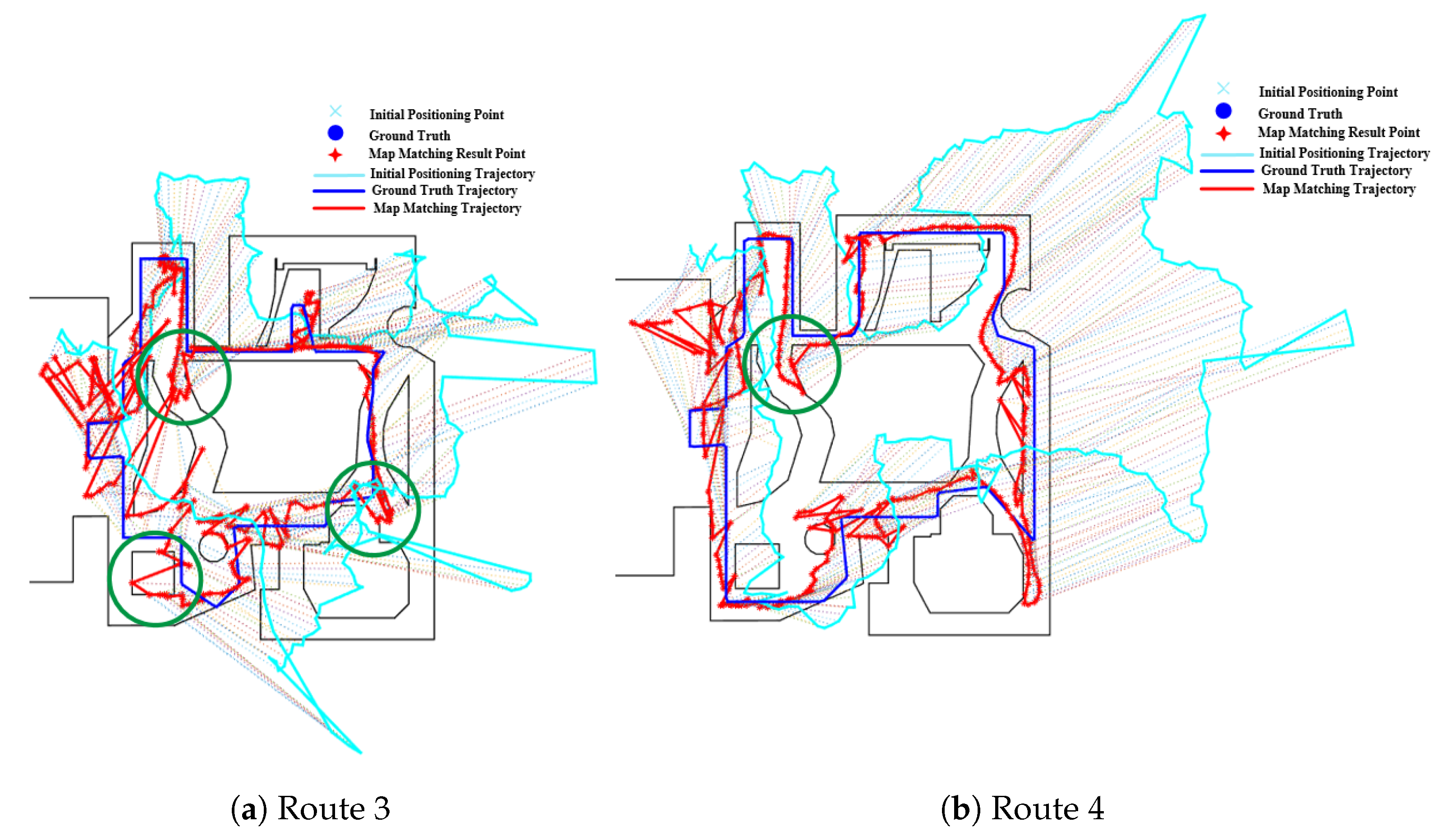
4.5. Effect of Open Space
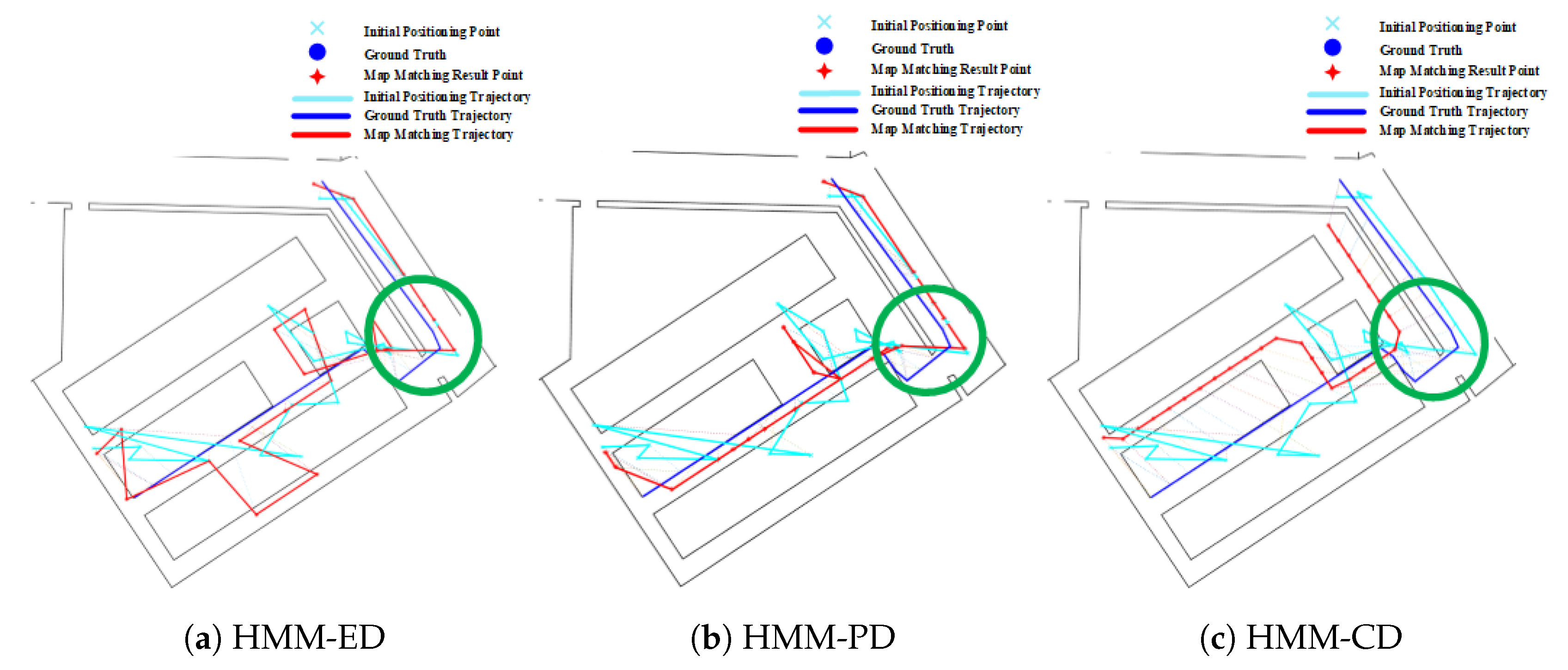
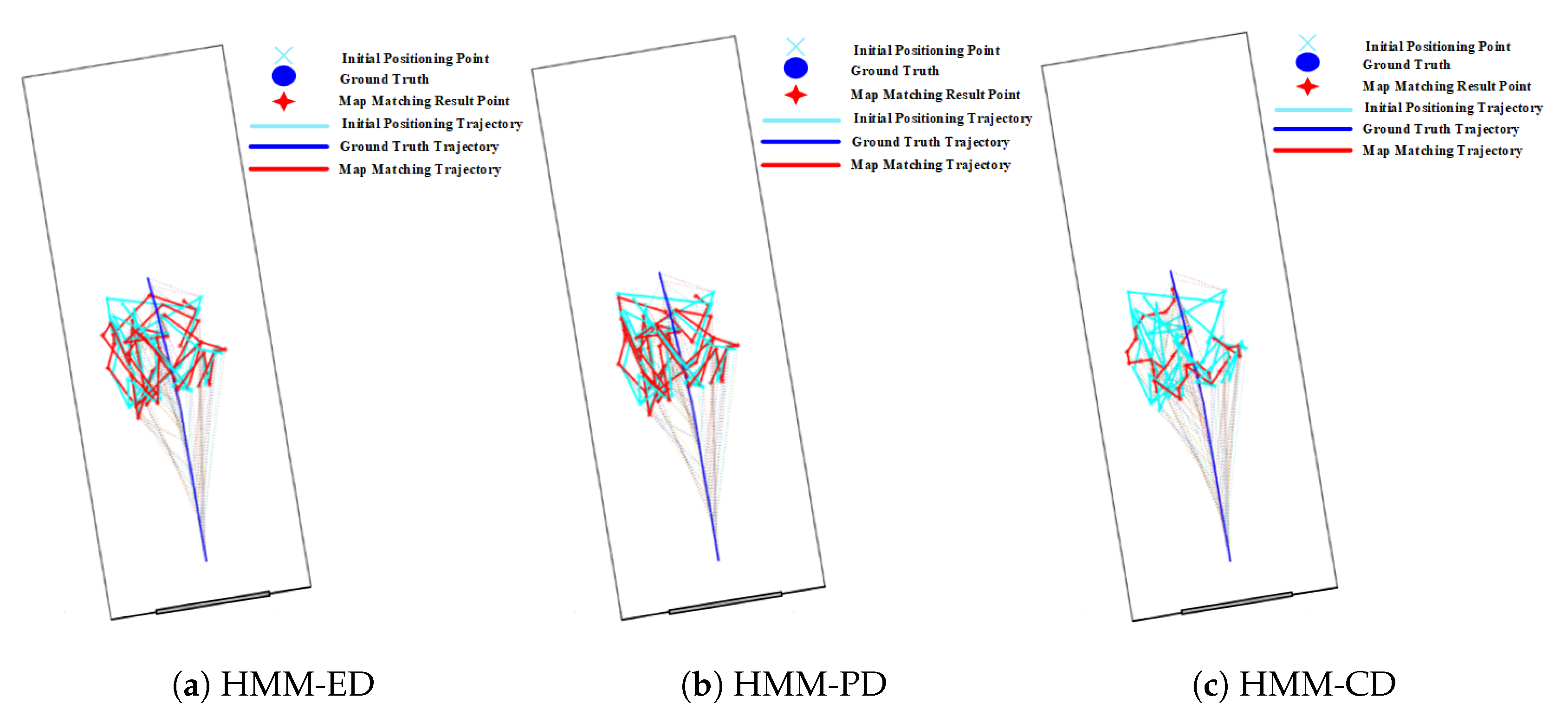
4.6. Effect of Corner
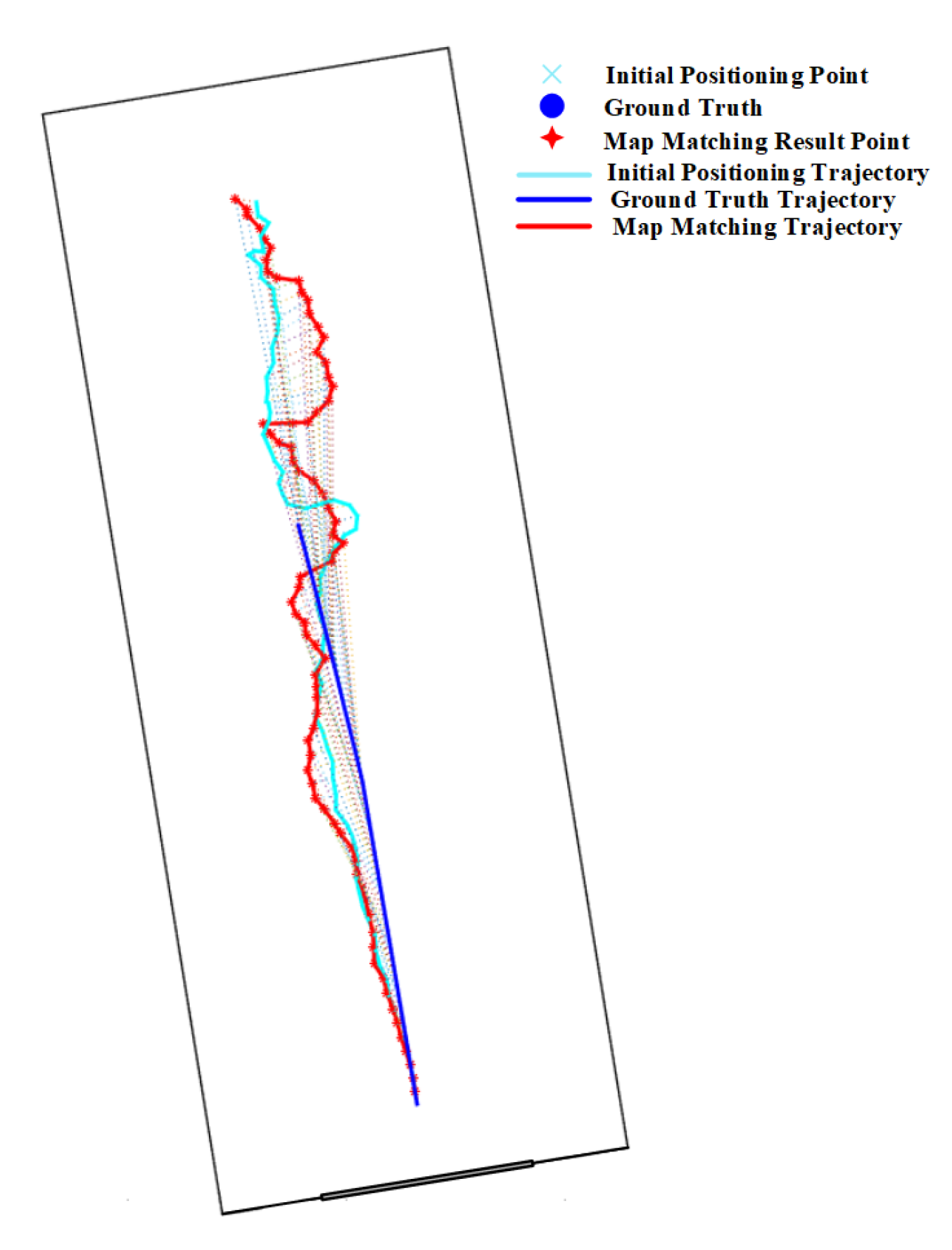
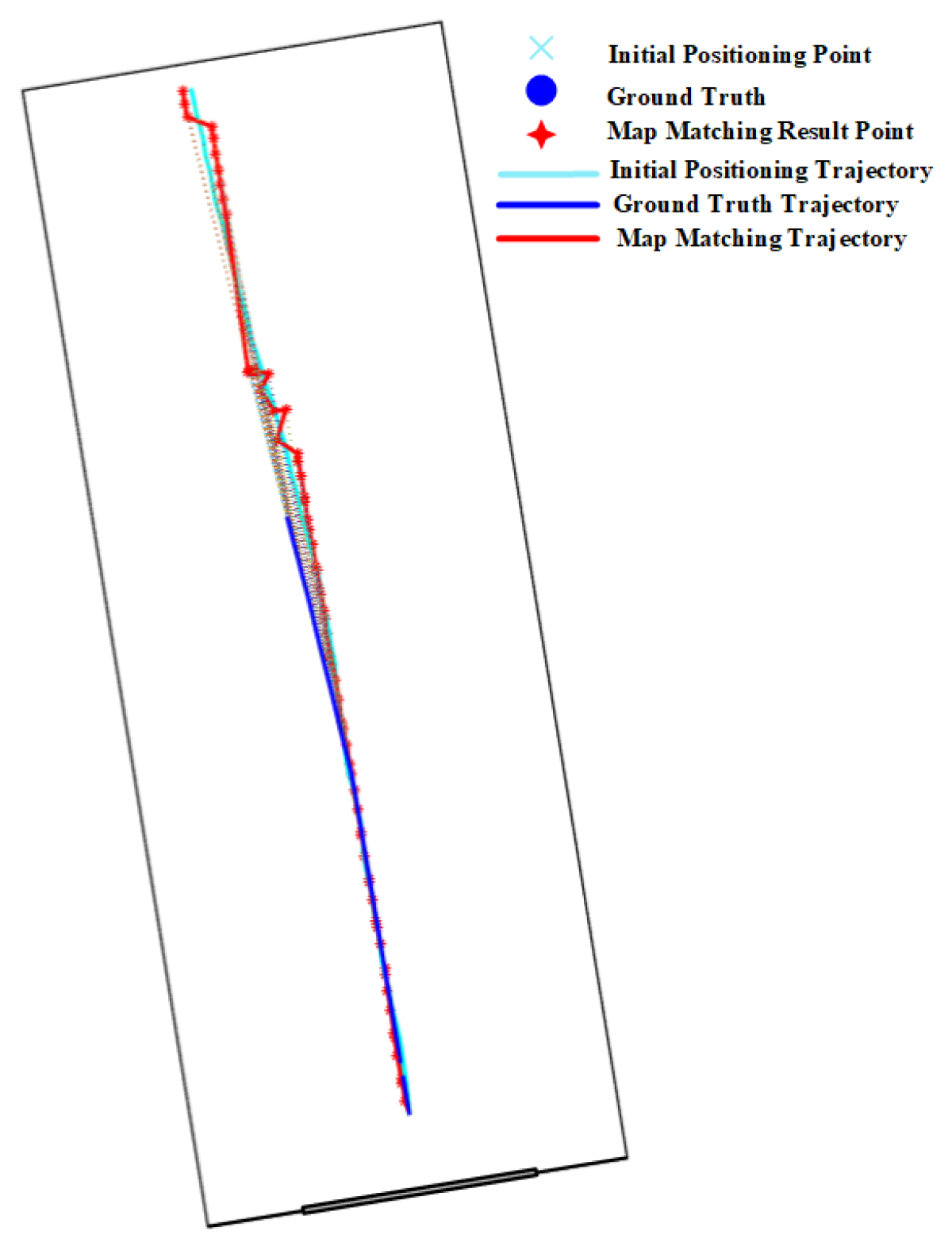
4.7. Effect of Narrow Corridor
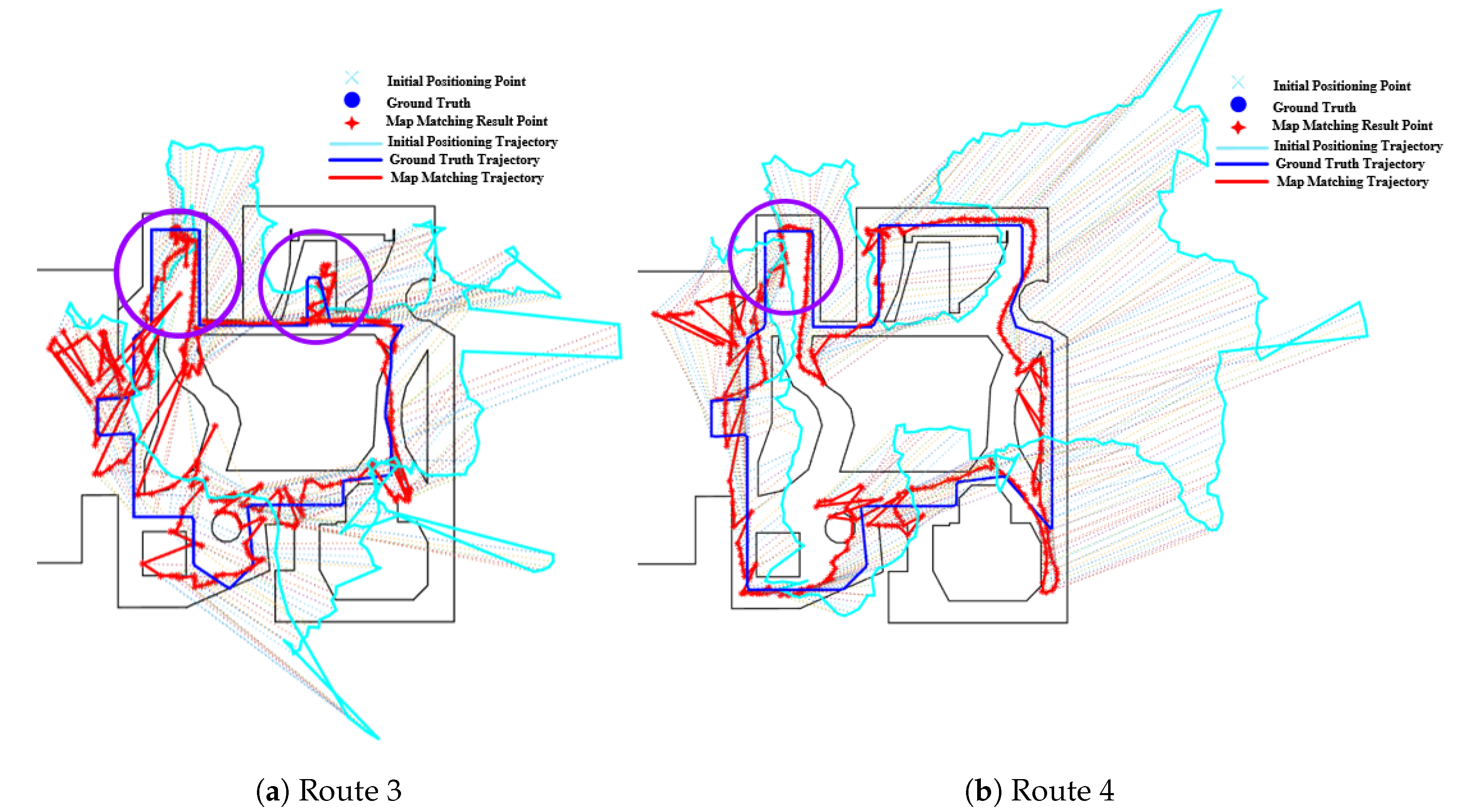
4.8. Effects of Walls on Map Matching Algorithms
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shang, J.; Hu, X.; Gu, F.; Wang, D.; Yu, S. Improvement schemes for indoor mobile location estimation: A survey. Math. Probl. Eng. 2015, 2015, 397298. [Google Scholar] [CrossRef]
- Pei, L.; Zhang, M.; Zou, D.; Chen, R.; Chen, Y. A survey of crowd sensing opportunistic signals for indoor localization. Mob. Inf. Syst. 2016, 2016, 4041291. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; He, Z.; Pei, L.; Chen, K.; Wang, M.; et al. Location-Enabled IoT (LE-IoT): A Survey of Positioning Techniques, Error Sources, and Mitigation. arXiv 2020, arXiv:2004.03738. [Google Scholar]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; He, Z.; Pei, L.; Chen, K.; Wang, M.; et al. Toward Location-Enabled IoT (LE-IoT): IoT Positioning Techniques, Error Sources, and Error Mitigation. 2020. IEEE Xplore Web site. Available online: https://ieeexplore.ieee.org/document/9184896/metrics#metrics (accessed on 23 November 2020).
- Simões, W.C.; Machado, G.S.; Sales, A.; de Lucena, M.M.; Jazdi, N.; de Lucena, V.F. A Review of Technologies and Techniques for Indoor Navigation Systems for the Visually Impaired. Sensors 2020, 20, 3935. [Google Scholar] [CrossRef]
- Zhuang, Y.; Hua, L.; Qi, L.; Yang, J.; Cao, P.; Cao, Y.; Wu, Y.; Thompson, J.; Haas, H. A survey of positioning systems using visible LED lights. IEEE Commun. Surv. Tutor. 2018, 20, 1963–1988. [Google Scholar] [CrossRef] [Green Version]
- Yu, C.; Lan, H.; Gu, F.; Yu, F.; El-Sheimy, N. A map/INS/Wi-Fi integrated system for indoor location-based service applications. Sensors 2017, 17, 1272. [Google Scholar] [CrossRef]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi integration based on handheld devices for indoor pedestrian navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; He, Z.; Gao, Z.; Zhuang, Y.; Shi, C.; El-Sheimy, N. Toward robust crowdsourcing-based localization: A fingerprinting accuracy indicator enhanced wireless/magnetic/inertial integration approach. IEEE Internet Things J. 2018, 6, 3585–3600. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Chen, R.; Chen, L.; Xu, S.; Li, W.; Wu, Y.; Zhou, H. Precise 3D Indoor Localization Based on Wi-Fi FTM and Built-in Sensors. 2020. IEEE Xplore Web site. Available online: https://ieeexplore.ieee.org/document/9107223 (accessed on 23 November 2020).
- Ramezani, M.; Acharya, D.; Gu, F.; Khoshelham, K. Indoor positioning by visual-inertial odometry. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 371. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Ren, M.; Wang, P.; Meng, J.; Mu, Y. Indoor Localization Based on VIO System and Three-Dimensional Map Matching. Sensors 2020, 20, 2790. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, P.; Gu, F.; Zheng, X.; Shang, J. HTrack:: An Efficient Heading-Aided Map Matching for Indoor Localization and Tracking. IEEE Sens. J. 2019, 19, 3100–3110. [Google Scholar] [CrossRef]
- Xia, H.; Zuo, J.; Liu, S.; Qiao, Y. Indoor localization on smartphones using built-in sensors and map constraints. IEEE Trans. Instrum. Meas. 2018, 68, 1189–1198. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Nie, J.; Lin, L. Magnetic-based indoor localization using smartphone via a fusion algorithm. IEEE Sens. J. 2019, 19, 6477–6485. [Google Scholar] [CrossRef]
- Gu, F.; Hu, X.; Ramezani, M.; Acharya, D.; Khoshelham, K.; Valaee, S.; Shang, J. Indoor localization improved by spatial context-A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–35. [Google Scholar] [CrossRef] [Green Version]
- White, C.E.; Bernstein, D.; Kornhauser, A.L. Some map matching algorithms for personal navigation assistants. Transp. Res. Part C Emerg. Technol. 2000, 8, 91–108. [Google Scholar] [CrossRef]
- Ma, L.; Fan, Y.; Xu, Y.; Cui, Y. Pedestrian dead reckoning trajectory matching method for radio map crowdsourcing building in WiFi indoor positioning system. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Abdelbar, M.; Buehrer, R.M. Improving cellular positioning indoors through trajectory matching. In Proceedings of the Position, Location and Navigation Symposium (PLANS), 2016 IEEE/ION, Savannah, GA, USA, 11–14 April 2016; pp. 219–224. [Google Scholar]
- Xiao, Z.; Wen, H.; Markham, A.; Trigoni, N. Lightweight map matching for indoor localisation using conditional random fields. In Proceedings of the IPSN-14 Proceedings of the 13th International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014; pp. 131–142. [Google Scholar]
- Woodman, O.; Harle, R. Pedestrian localisation for indoor environments. In Proceedings of the 10th International Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; pp. 114–123. [Google Scholar]
- Shang, J.; Gu, F.; Hu, X.; Kealy, A. Apfiloc: An infrastructure-free indoor localization method fusing smartphone inertial sensors, landmarks and map information. Sensors 2015, 15, 27251–27272. [Google Scholar] [CrossRef] [Green Version]
- Hilsenbeck, S.; Bobkov, D.; Schroth, G.; Huitl, R.; Steinbach, E. Graph-based data fusion of pedometer and WiFi measurements for mobile indoor positioning. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Washington, DC, USA, 13–17 September 2014; pp. 147–158. [Google Scholar]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W.; Zhang, X. Activity sequence-based indoor pedestrian localization using smartphones. IEEE Trans. Hum. Mach. Syst. 2014, 45, 562–574. [Google Scholar] [CrossRef]
- Davidson, P.; Piché, R. A survey of selected indoor positioning methods for smartphones. IEEE Commun. Surv. Tutorials 2016, 19, 1347–1370. [Google Scholar] [CrossRef]
- Ilkovičová, L.; Kajánek, P.; Kopáčik, A. Pedestrian indoor positioning and tracking using smartphone sensors step detection and map matching algorithm. In Proceedings of the International Symposium on Engineering Geodesy, Varaždin, Croatia, 20–22 May 2016; pp. 20–22. [Google Scholar]
- Gu, F.; Valaee, S.; Khoshelham, K.; Shang, J.; Zhang, R. Landmark Graph-based Indoor Localization. IEEE Internet Things J. 2020, 4, 8343–8355. [Google Scholar] [CrossRef]
- Taneja, S.; Akinci, B.; Garrett, J.H.; Soibelman, L., Jr.; Karimi, H.A. Effects of positioning data quality and navigation models on map-matching of indoor positioning data. J. Comput. Civ. Eng. 2016, 30, 04014113. [Google Scholar] [CrossRef]
- Meng, J.; Ren, M.; Wang, P.; Zhang, J.; Mou, Y. Improving Positioning Accuracy via Map Matching Algorithm for Visual—Inertial Odometer. Sensors 2020, 20, 552. [Google Scholar] [CrossRef] [PubMed] [Green Version]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Route No. | PF (500) | PF (1000) | ||
|---|---|---|---|---|
| Without SC | With SC | Without SC | With SC | |
| 1 | 3.53 | 1.48 | 3.31 | 1.48 |
| 2 | 1.40 | 1.17 | 1.44 | 1.17 |
| 3 | 7.72 | 3.43 | 7.91 | 3.36 |
| 4 | 7.87 | 3.29 | 8.04 | 3.27 |
| 5 | 7.79 | 7.81 | 7.83 | 7.72 |
| Route No. | Wi-Fi Fingerprinting | +HMM (ED) | +HMM (PD) | +HMM (CD) |
|---|---|---|---|---|
| 1 | 3.33 | 3.18 | 3.18 | 5.31 |
| 2 | 2.69 | 2.69 | 2.42 | 3.88 |
| 3 | 5.76 | 6.04 | 6.04 | 6.55 |
| 4 | 4.01 | 3.64 | 3.50 | 2.81 |
| 5 | 8.60 | 8.56 | 8.55 | 8.34 |
| Route No. | PDR | PDR + Geometric |
|---|---|---|
| 1 | 9.08 | 5.89 |
| 2 | 3.43 | 1.98 |
| 3 | 19.05 | 9.91 |
| 4 | 18.53 | 7.18 |
| 5 | 10.89 | − |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, S.; Gu, F.; Xu, F.; Shang, J. Effect Evaluation of Spatial Characteristics on Map Matching-Based Indoor Positioning. Sensors 2020, 20, 6698. https://doi.org/10.3390/s20226698
Luo S, Gu F, Xu F, Shang J. Effect Evaluation of Spatial Characteristics on Map Matching-Based Indoor Positioning. Sensors. 2020; 20(22):6698. https://doi.org/10.3390/s20226698
Chicago/Turabian StyleLuo, Shuaiwei, Fuqiang Gu, Fan Xu, and Jianga Shang. 2020. "Effect Evaluation of Spatial Characteristics on Map Matching-Based Indoor Positioning" Sensors 20, no. 22: 6698. https://doi.org/10.3390/s20226698
APA StyleLuo, S., Gu, F., Xu, F., & Shang, J. (2020). Effect Evaluation of Spatial Characteristics on Map Matching-Based Indoor Positioning. Sensors, 20(22), 6698. https://doi.org/10.3390/s20226698