Improving Polar-Coded SCMA System by Information Coupling and Parity Check


Abstract
:1. Introduction
- The uplink information-coupled PC-SCMA system is proposed. At the transmitter, channel coding, SCMA mapping, and transmission are all performed based on CB. When the entire TB is received, the receiver performs iterative detection and decoding.
- The PCCA-polar code in system form is designed. Then, every two consecutive systematic PCCA-polar code blocks are connected by information coupling technology to form a new type of PIC polar code. For windowed decoder, the list algorithm based on parity check can provide more accurate extrinsic messages for the coupling CBs. In addition, the windowed decoding algorithm is improved for the requirement of iterative system.
- An extrinsic messages construction algorithm of coupled polar decoder is proposed. This algorithm enables the coupled polar decoder to exchange extrinsic messages with the MPA detector, and achieving iterative detection and decoding.
- A joint iterative detection and SCL decoding algorithm (JIDS) based on variable list size is designed. During the iteration, those CBs who failed CRC verification improved the performance in the next iteration by increasing the list size, while others maintained a smaller list size. In addition, when all CBs are correctly decoded, the iteration is stopped immediately.
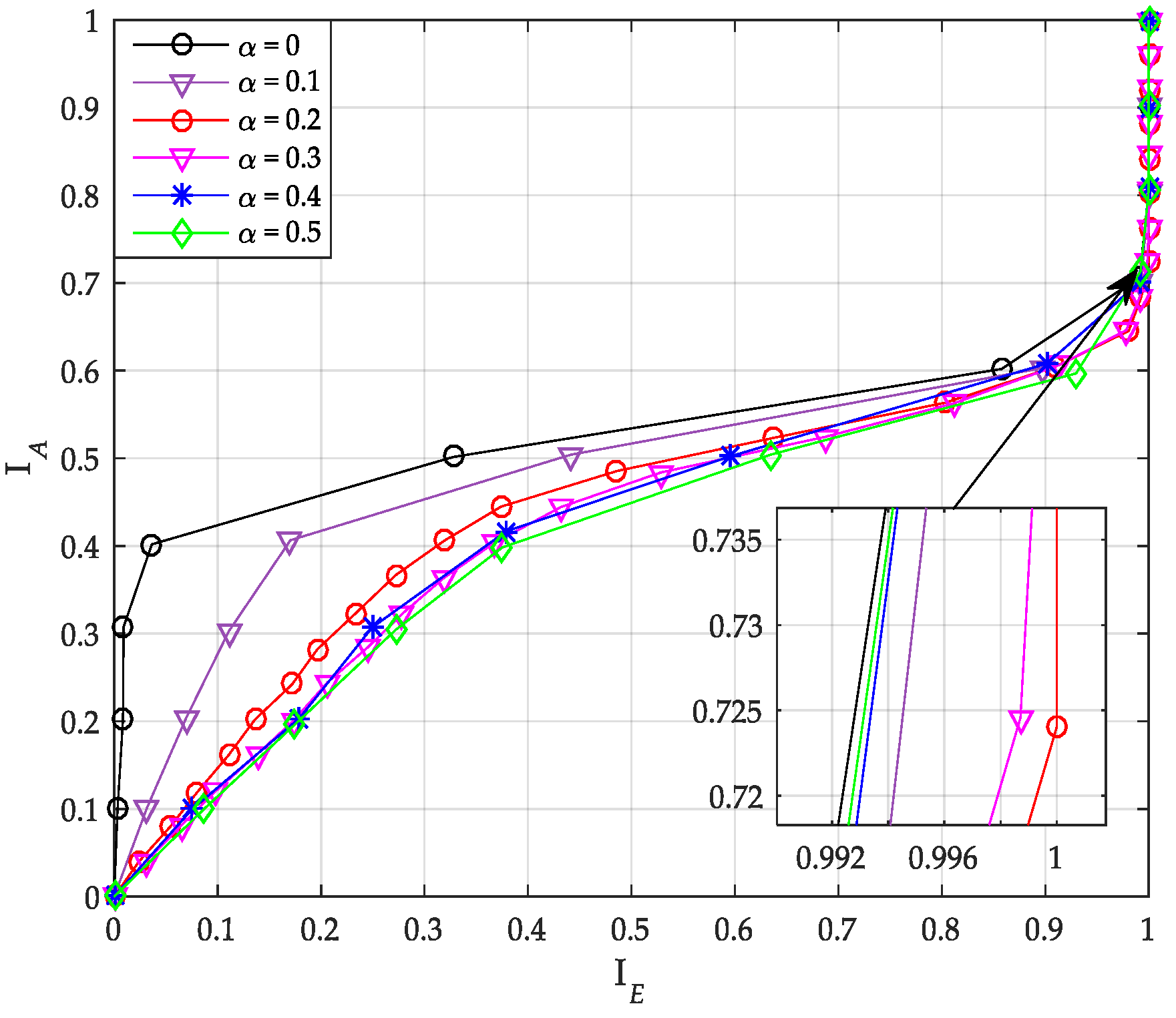
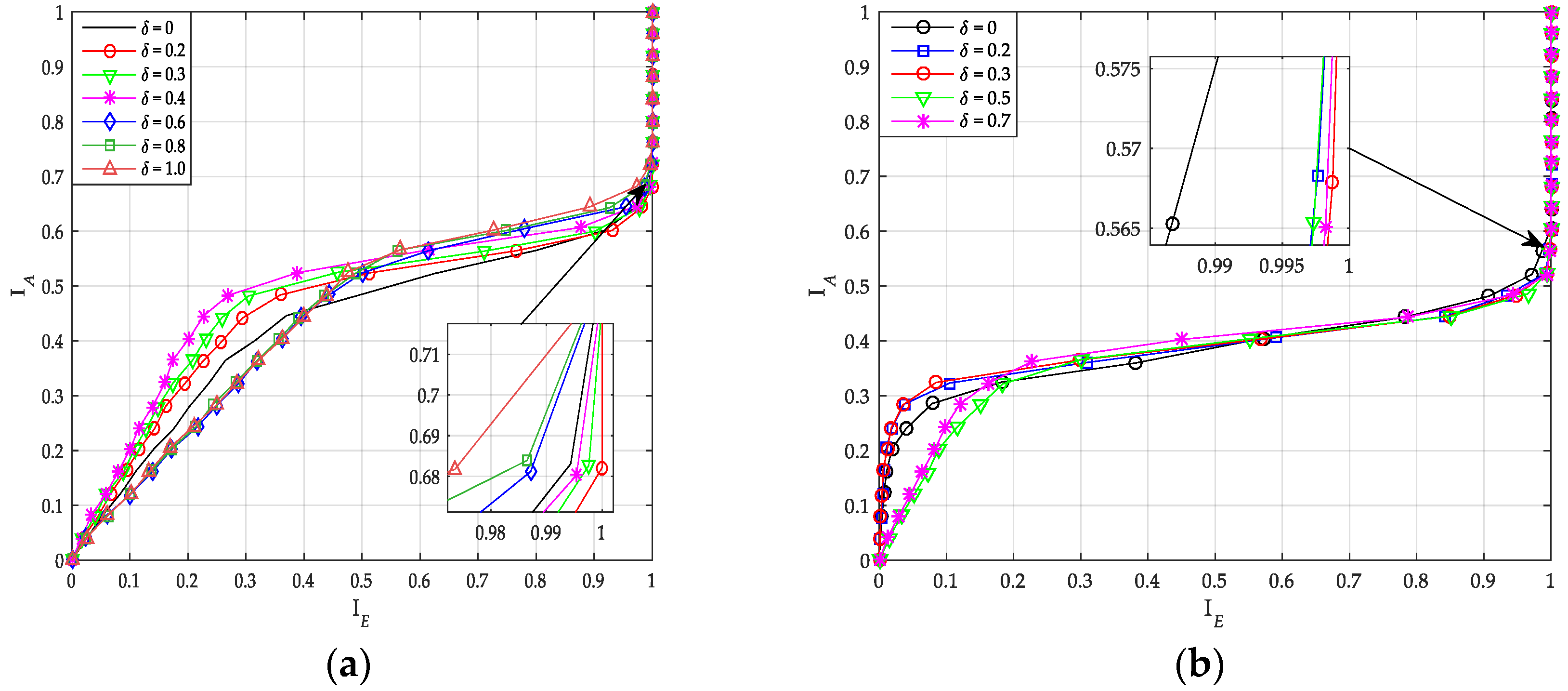
- The extrinsic information transfer (EXIT) idea is used to optimize the weight factor of extrinsic messages construction algorithm and coupling ratio of PIC PCCA-polar code.
2. System Model
3. Design of Partially Information-Coupled Polar Code based on Parity Check
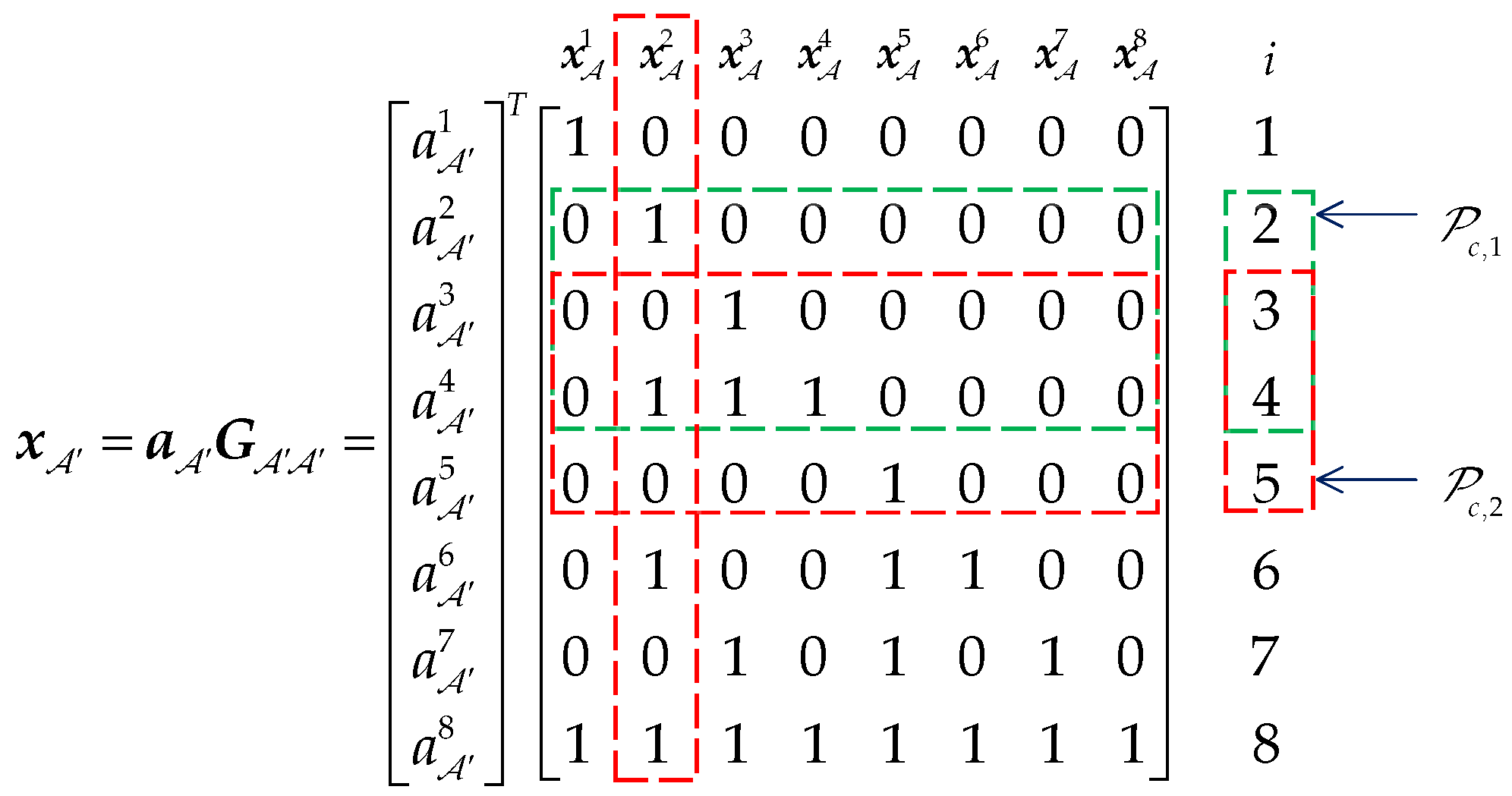
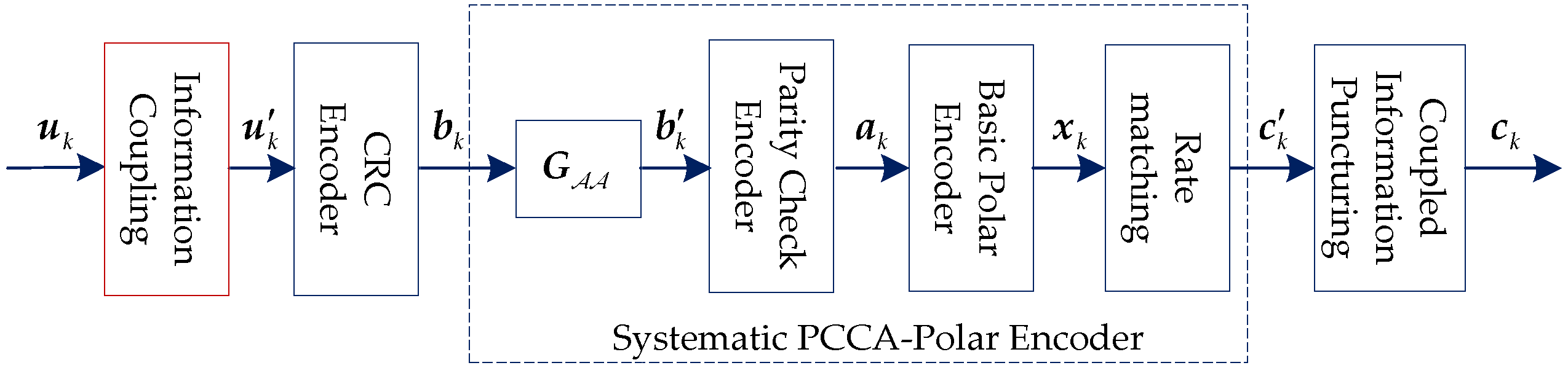
3.1. Systematic PCCA-Polar Code
| Algorithm 1 Get parity check indices |
| Input: and . |
| Output: . |
| 1: Initialize: . |
| 2: Generate submatrix and calculate the row’s weight of . |
| 3: . |
| 4: while do |
| 5: . |
| 6: for do |
| 7: if then |
| 8: Get of . |
| 9: . |
| 10: if then |
| 11: update the set . |
| 12: end if |
| 13: end if |
| 14: end for |
| 15: if then |
| 16: Select elements with the lowest reliability of as set . |
| 17: update the set . |
| 18: else |
| 19: update the set . |
| 20: end if |
| 21: . |
| 22: end while |
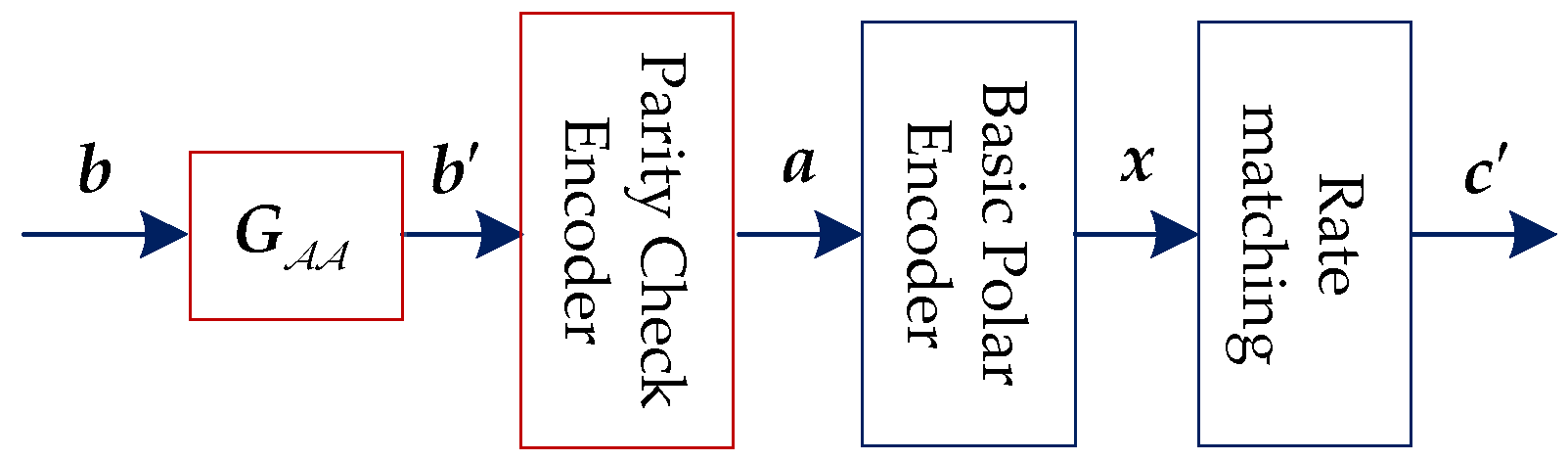
| Algorithm 2 Systematic PCCA-polar encoding |
| Input: , , , and rate-matching pattern , where . |
| Output: . |
| 1: Initialize: Set a p-length cyclic shift register to 0, and , where . |
| 2: Generate the generator matrix . |
| 3: Get the information and CRC indices , and generate the submatrix . |
| 4: Calculate . |
| 5: for do //PC bits generation [14] |
| 6: Cyclic left shift the register. |
| 7: If : set . |
| 8: If : set . |
| 9: end for |
| 10: Perform the basic polar coding to obtain mother code by . |
| 11: Get systematic PCCA-polar codes by rate-matching pattern . |
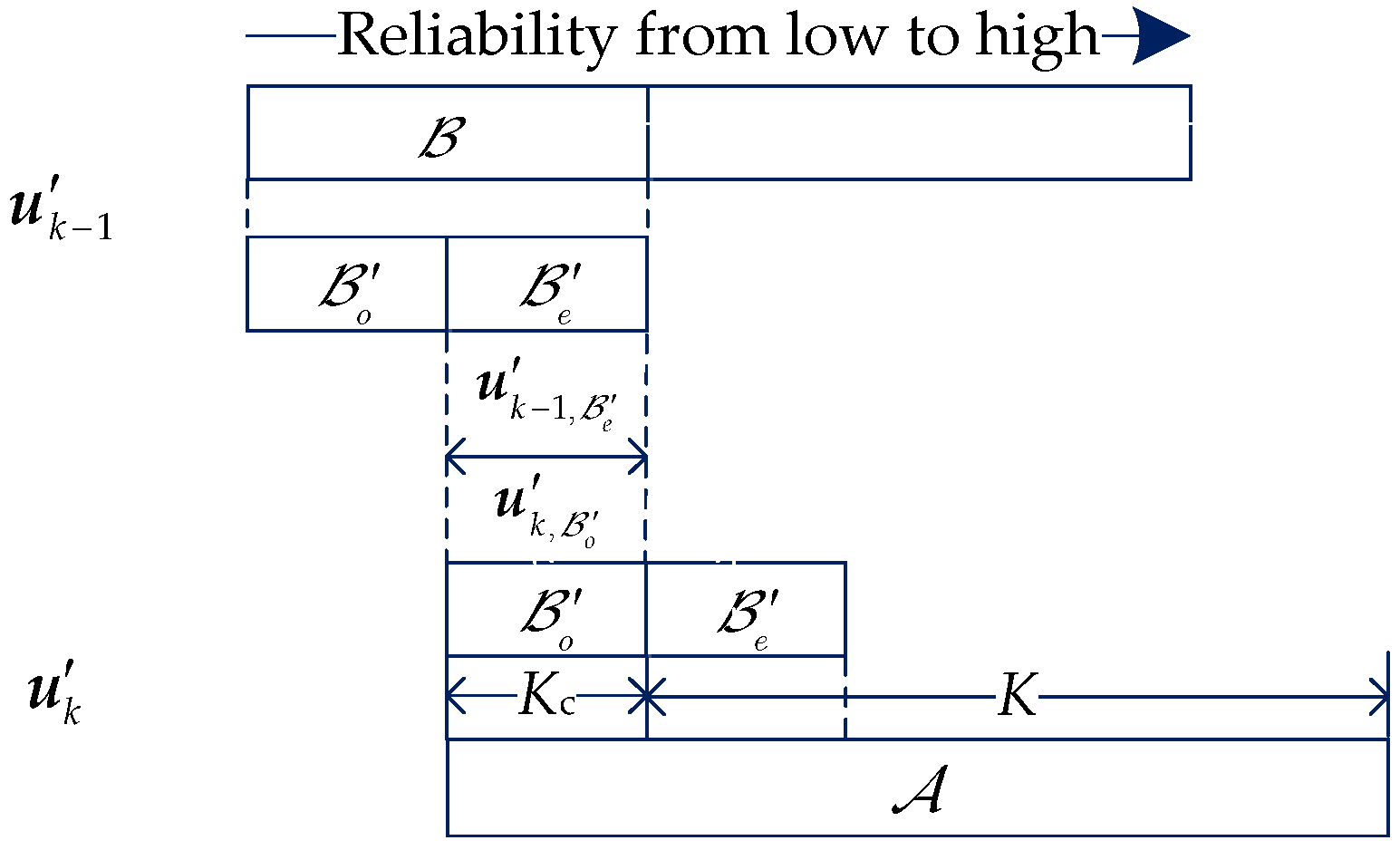
3.2. Partially Information-Coupled PCCA-Polar Code
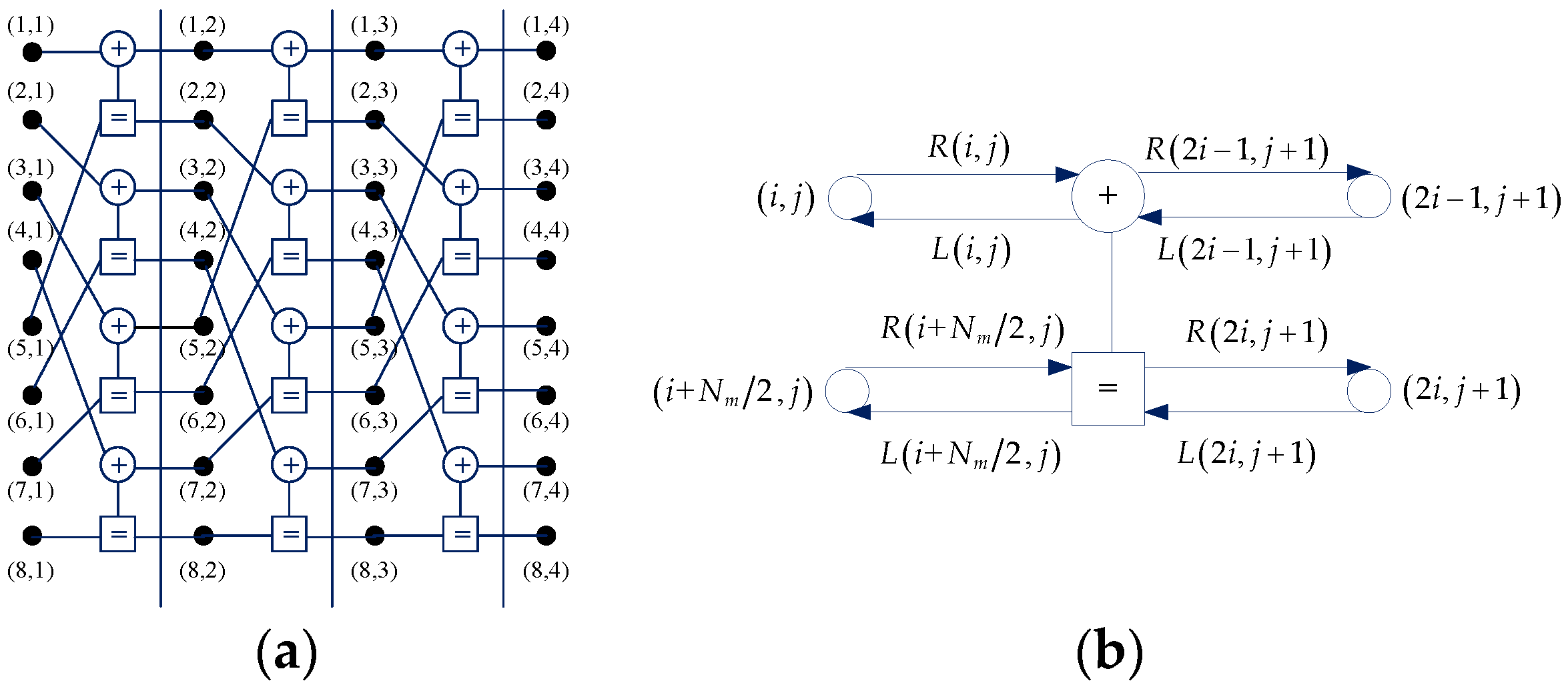
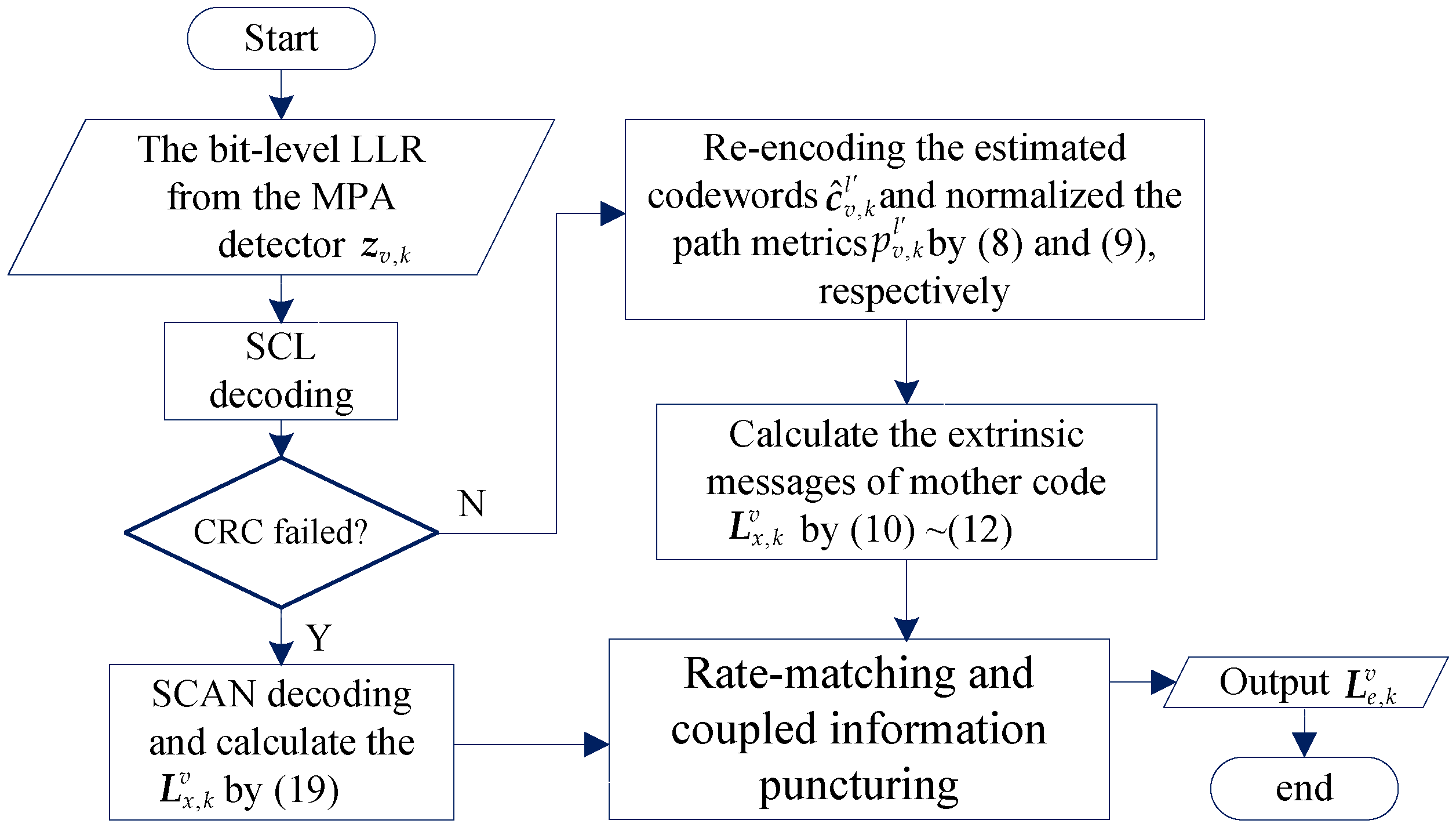
4. Joint Iterative Detection and SCL Decoding Receiver
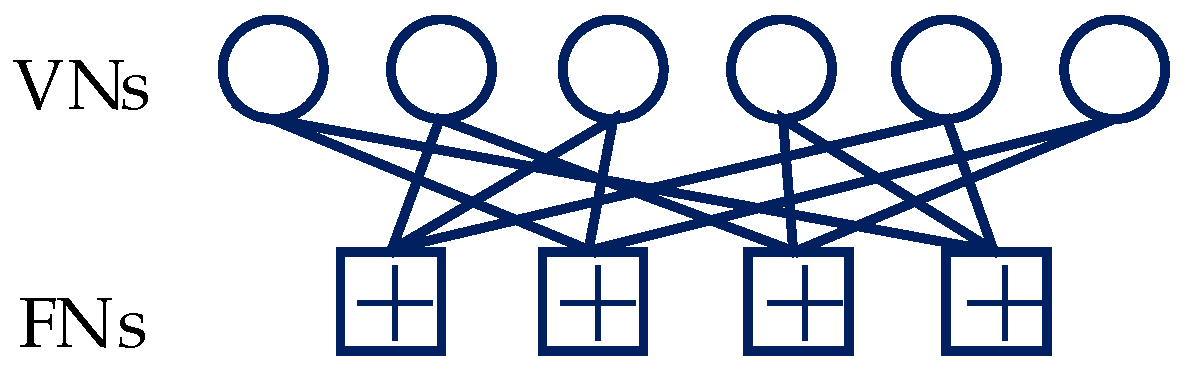
- : The messages passing from the i-th function node to the j-th variable node .
- : The messages passing from the j-th variable node to the i-th function node .
- : The set of function nodes that connect to variable node .
- : The set of variable nodes that connect to function node .
- : Excluding function node from the set of .
- : Excluding variable node from the set of .
- : The prior information of the l-th SCMA codeword for user v.
4.1. Update Function Nodes of MPA Detector
4.2. Updated a Priori Information of MPA Detector
4.3. Update Variable Nodes of MPA Decoder
| Algorithm 3 Joint iterative detection and SCL decoding |
| Input: Signal from the channel, maximum number of iterations , windowed size , list size and . |
| Output: The decoding decision . |
| 1: Initialize: and , , . |
| 2: for iter_num = do |
| 3: for do //Update the function nods |
| 4: for do |
| 5: Calculate the extrinsic messages by (4) to (6). |
| 6: end for |
| 7: end for |
| 8: for do //Update the Priori Information |
| 9: De-interleave the to , and input to the coupled polar decoder. |
| 10: Run the decoder, calculate the extrinsic messages by HC algorithm. |
| 11: for do |
| 12: if CRC check fails then |
| 13: Modify the list size by (22). |
| 14: end if |
| 15: end for |
| 16: Interleave the to . |
| 17: end for |
| 18: for do |
| 19: for do |
| 20: Transform the priori information into the probability domain by (20). |
| 21: Update the information of variable nodes by (21). |
| 22: end for |
| 23: end for |
| 24: If all users decode correctly, exit the iteration. |
| 25: end for |
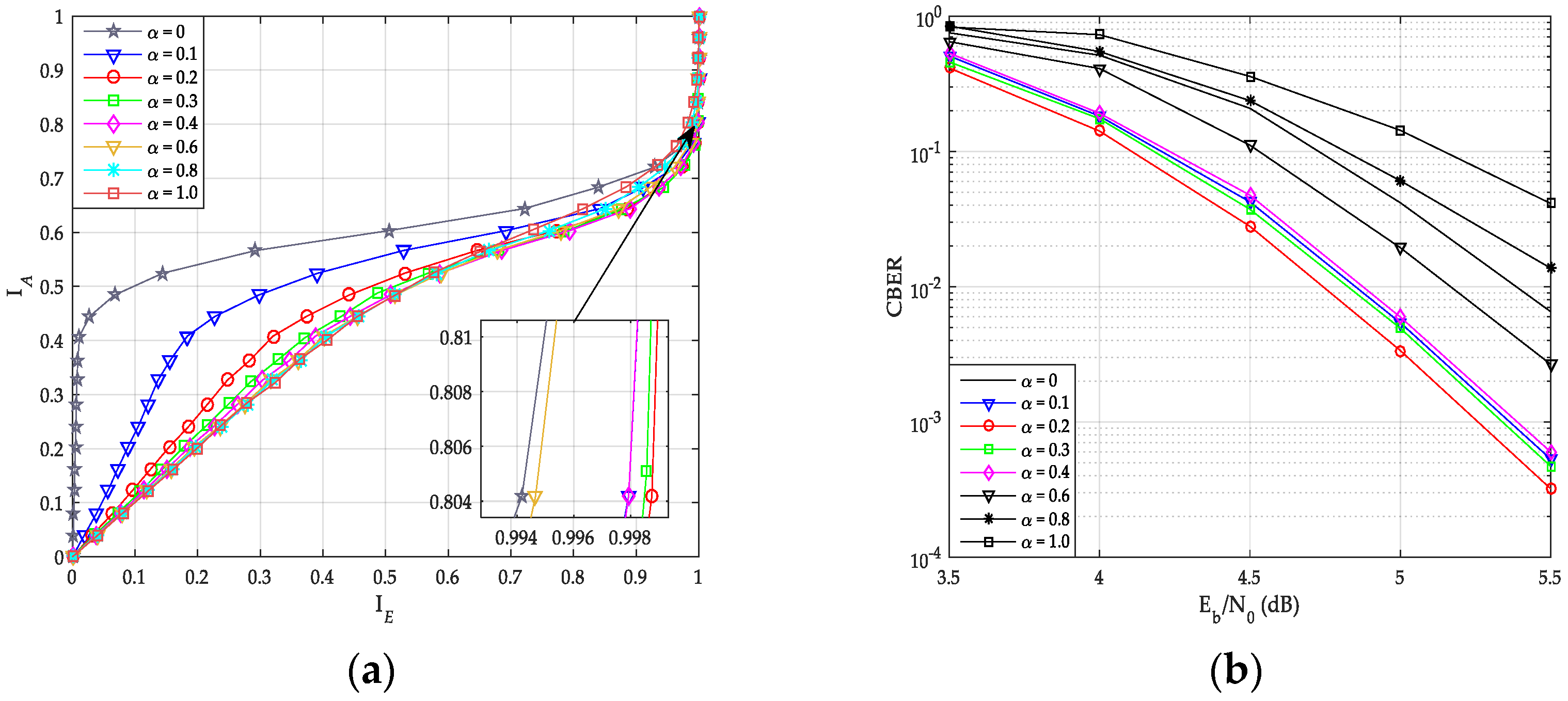
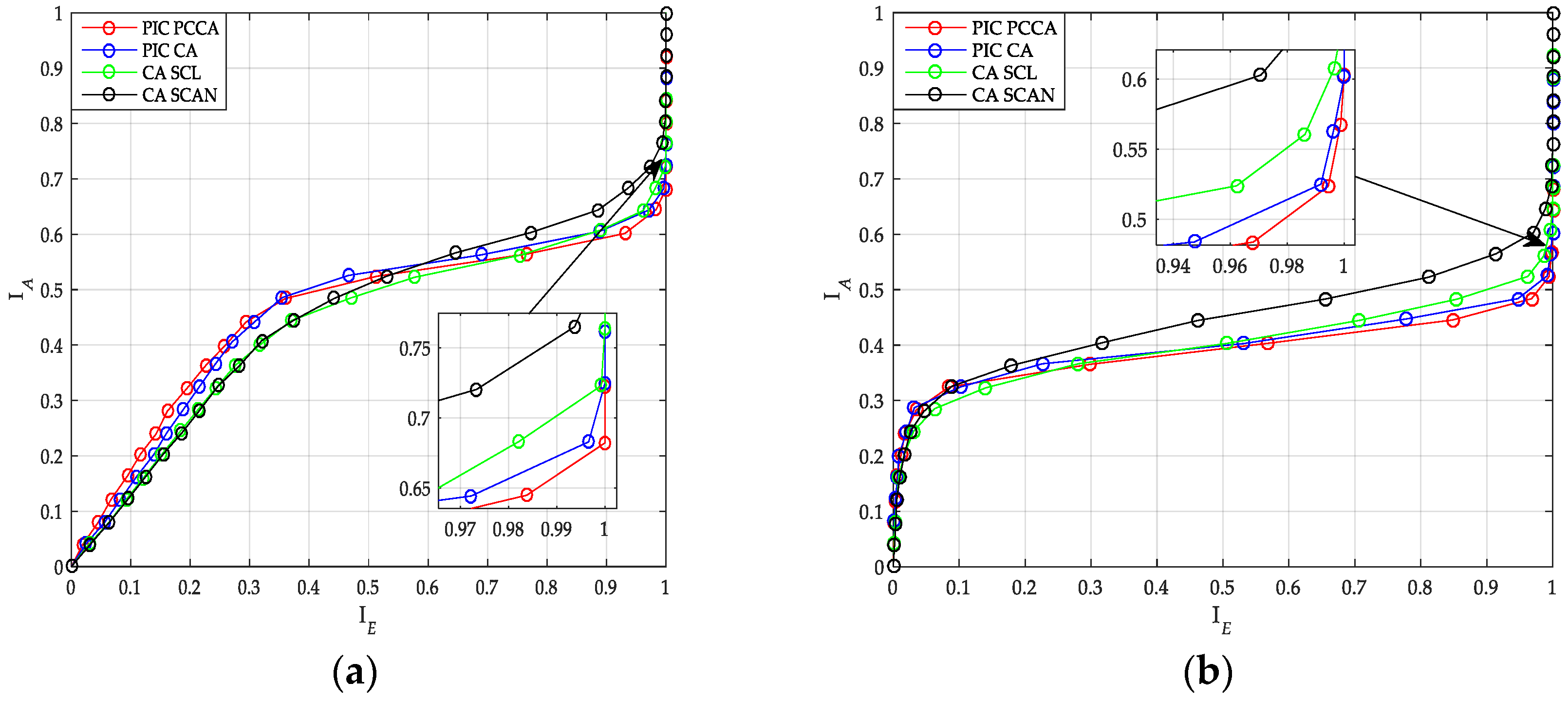
5. Optimization of Partially Information-Coupled Polar Code Based on EXIT Idea
5.1. Transfer Characteristics of Base Polar Decoder
5.2. Optimization of Coupling Ratio for PIC PCCA-Polar Code
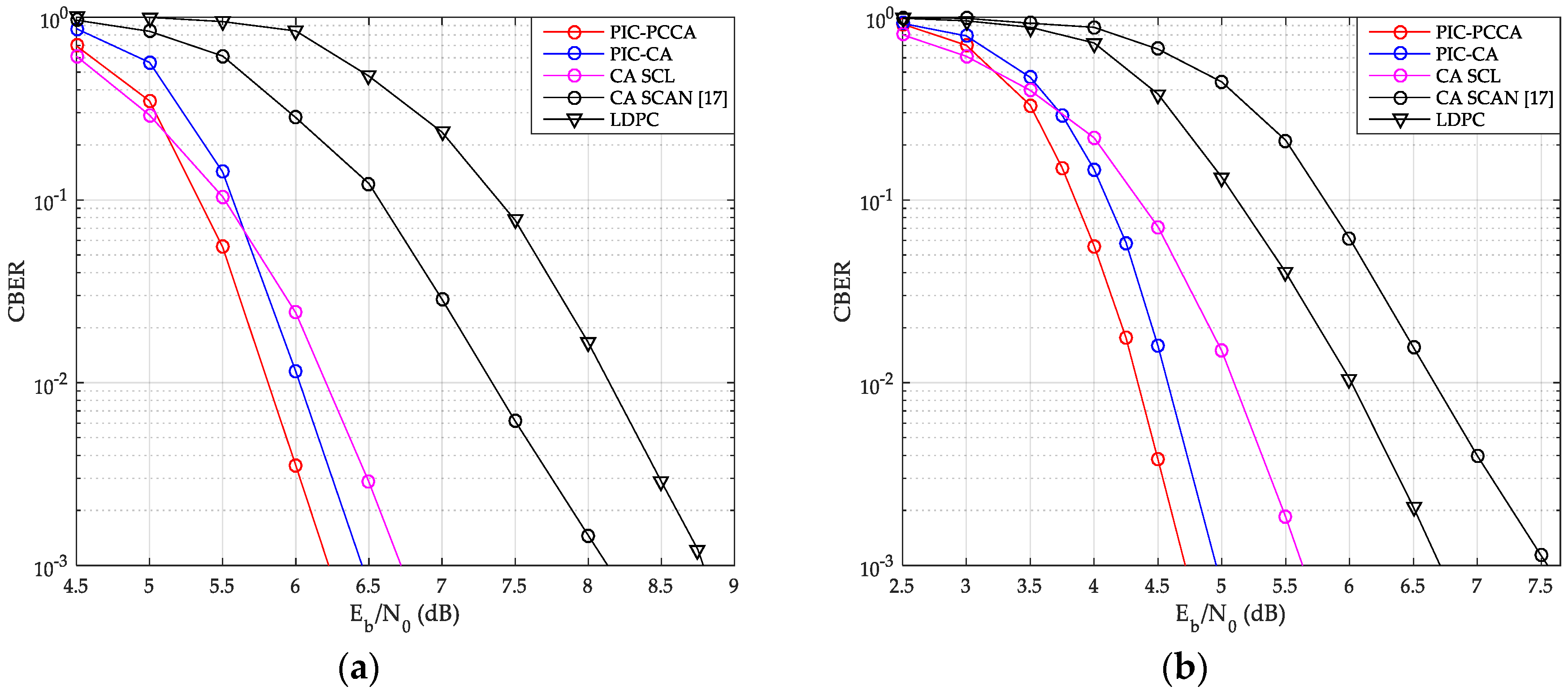
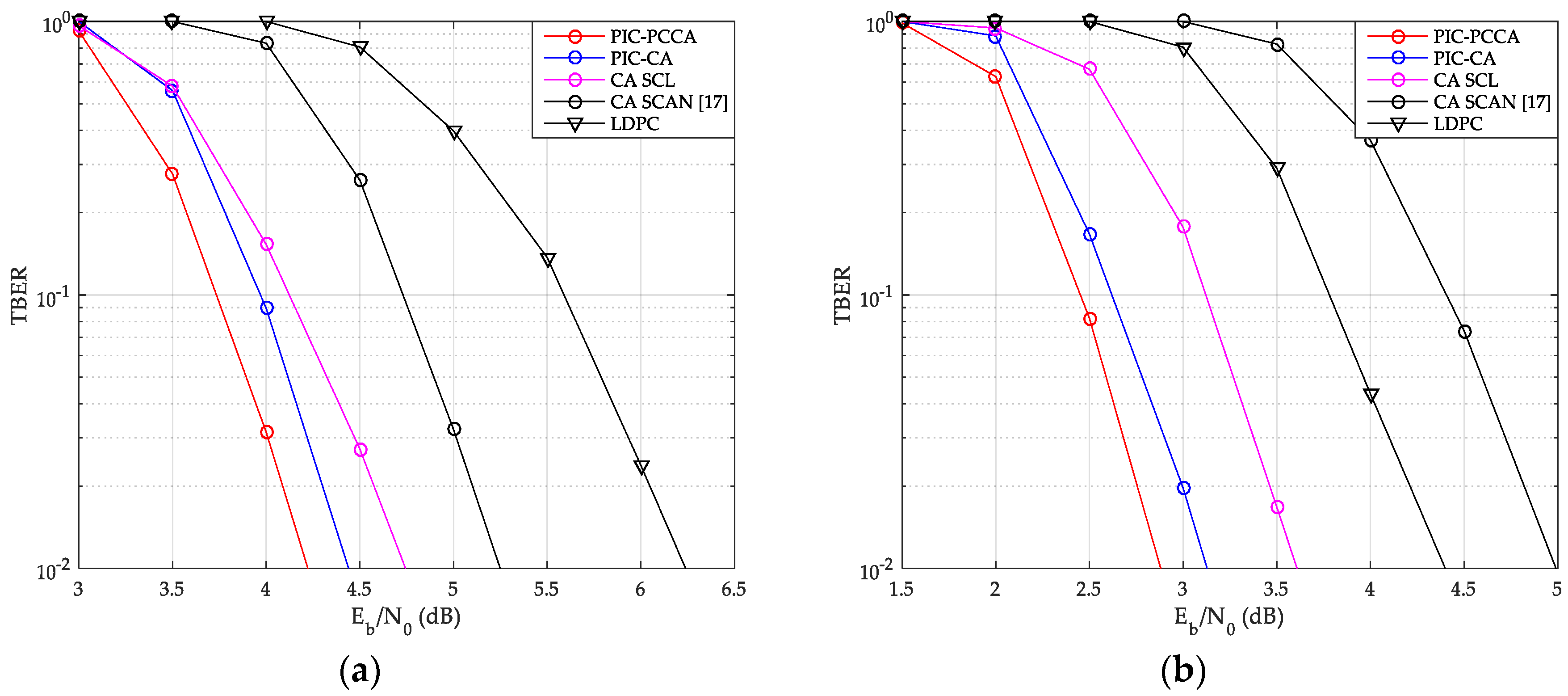
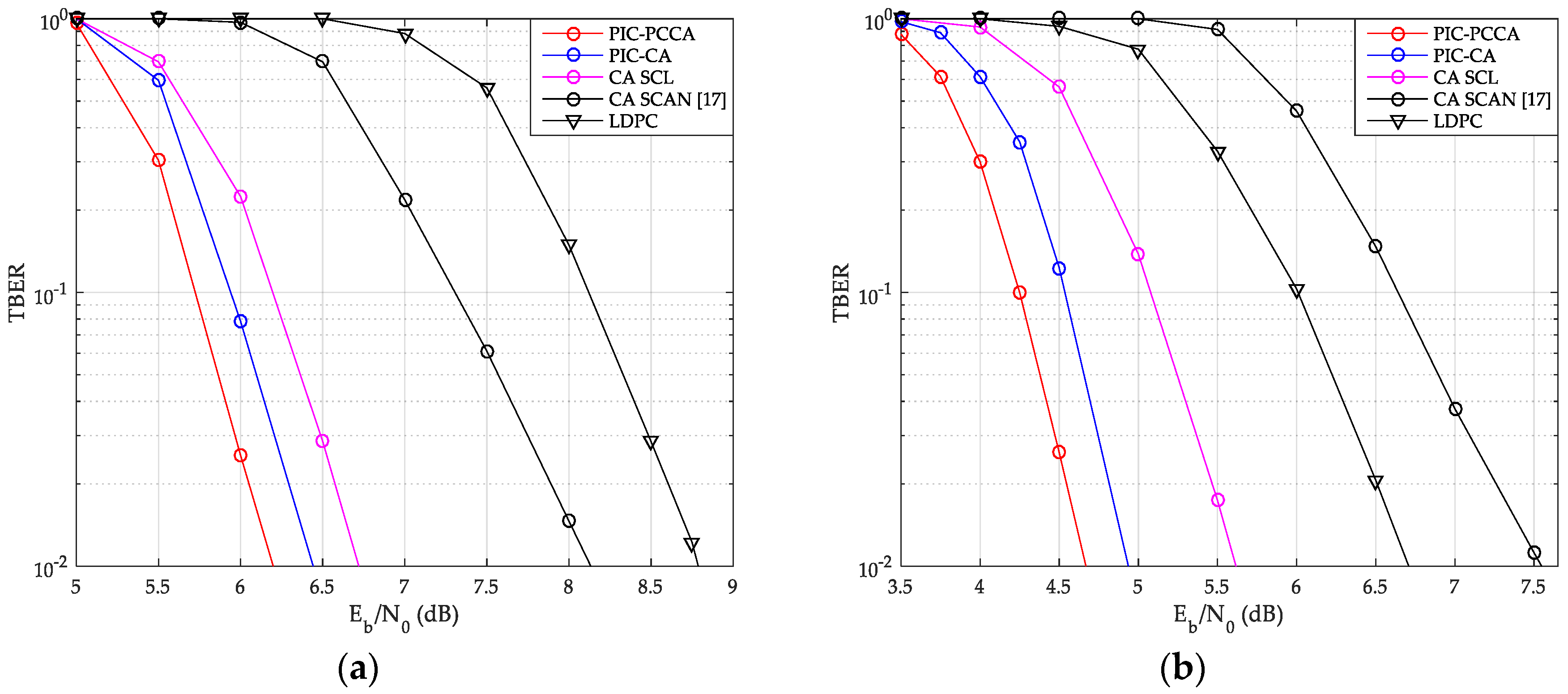
6. Performance Evaluation
6.1. Block Error Rate Performance Comparison
6.2. Complexity Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Nikopour, H.; Baligh, H. Sparse code multiple access. In Proceedings of the 2013 IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), London, UK, 8–11 September 2013; pp. 332–336. [Google Scholar]
- Chen, S.; Ren, B.; Gao, Q.; Kang, S.; Sun, S.; Niu, K. Pattern Division Multiple Access (PDMA)—A Novel Non-orthogonal Multiple Access for 5G Radio Networks. IEEE Trans. Veh. Tech. 2017, 66, 3185–3196. [Google Scholar] [CrossRef]
- Yuan, Z.; Yu, G.; Li, W.; Yuan, Y.; Wang, X.; Xu, J. Multi-User Shared Access for Internet of Things. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Van De Beek, J.; Popovic, B.M. Multiple access with low-density signatures. In Proceedings of the IEEE GLOBECOM, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–6. [Google Scholar]
- Hoshyar, R.; Wathan, F.P.; Tafazolli, R. Novel low-density signature for synchronous CDMA systems over AWGN channel. IEEE Trans. Signal Process. 2008, 56, 1616–1626. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Zhang, S.; Chen, Y. Iterative multiuser receiver in sparse code multiple access systems. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 2918–2923. [Google Scholar]
- Wu, Z.; Lu, K.; Jiang, C.; Shao, X. Comprehensive Study and Comparison on 5G NOMA Schemes. IEEE Access 2018, 6, 18511–18519. [Google Scholar] [CrossRef]
- Arikan, E. Channel polarization: A method for constructing capacity-achieving codes for symmetric binary-input memoryless channels. IEEE Trans. Inf. Theory 2009, 55, 3051–3073. [Google Scholar] [CrossRef]
- Tal, I.; Vardy, A. List decoding of polar codes. IEEE Trans. Inf. Theory 2015, 66, 2213–2226. [Google Scholar] [CrossRef]
- Niu, K.; Chen, K. CRC-Aided Decoding of Polar Codes. IEEE Commun. Lett. 2012, 16, 1668–1671. [Google Scholar] [CrossRef]
- Stimming, A.B.; Parizi, M.B.; Burg, A. LLR-Based Successive Cancellation List Decoding of Polar Codes. IEEE Trans. Signal Process. 2015, 63, 5165–5179. [Google Scholar] [CrossRef] [Green Version]
- Arikan, E. A performance comparison of polar codes and Reed-Muller codes. IEEE Commun. Lett. 2008, 12, 447–449. [Google Scholar] [CrossRef]
- Fayyaz, U.U.; Barry, J.R. Low-Complexity Soft-Output Decoding of Polar Codes. IEEE J. Sel. Areas Commun. 2014, 32, 958–966. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project, Technical Specification Group Radio Access Network. NR, Multiplexing and channel coding (Release 15), TS 38.212. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3214 (accessed on 24 November 2020).
- Vameghestahbanati, M.; Marsland, I.; Gohary, R.H.; Yanikomeroglu, H. Polar Codes for SCMA Systems. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Dai, J.; Niu, K.; Si, Z.; Dong, C.; Lin, J. Polar-Coded Non-Orthogonal Multiple Access. IEEE Trans. Signal Process. 2018, 66, 1374–1389. [Google Scholar] [CrossRef] [Green Version]
- Pan, Z.; Li, E.; Zhang, L.; Lei, J.; Tang, C. Design and Optimization of Joint Iterative Detection and Decoding Receiver for Uplink Polar Coded SCMA System. IEEE Access 2018, 6, 52014–52026. [Google Scholar] [CrossRef]
- Yang, L.; Xie, Y.; Wu, X.; Yuan, J.; Cheng, X.; Wan, L. Partially information-coupled turbo codes for LTE systems. IEEE Trans. Commun. 2018, 66, 4381–4392. [Google Scholar] [CrossRef]
- Yang, L.; Xie, Y.; Yuan, J.; Cheng, X.; Wan, L. Chained LDPC codes for future communication systems. IEEE Commun. Lett. 2018, 22, 898–901. [Google Scholar] [CrossRef]
- Wu, X.; Yang, L.; Xie, Y.; Yuan, J. Partially Information Coupled Polar Codes. IEEE Access. 2018, 6, 63689–63702. [Google Scholar] [CrossRef]
- Qualcomm Incorporated. Design of polar codes for control channel (R1-1700832). In Proceedings of the 3GPP TSG-RAN WG1#NR Ad-Hoc Meeting, Spokane, WA, USA, 16–20 January 2017; pp. 1–5. [Google Scholar]
- Huawei, H. Parity-Check polar and CRC-aided polar evaluation (R1-1701701). In Proceedings of the 3GPP TSG RAN WG1 Meeting #88, Athens, Greece, 13–17 February 2017; pp. 1–10. [Google Scholar]
- Huawei, H. Polar Coding Design for Control Channel (R1-1706193). In Proceedings of the 3GPP TSG RAN WG1 Meeting #88bis, Spokane, WA, USA, 3–7 April 2017; pp. 1–21. [Google Scholar]
- CATT. Design of polar codes for eMBB control channel (R1-1702110). In Proceedings of the 3GPP TSG RAN WG1 Meeting #88, Athens, Greece, 13–17 February 2017; pp. 1–4. [Google Scholar]
- Nokia; Alcatel-Lucent Shanghai Bell. Polar codes design for UL control (R1-1701033). In Proceedings of the 3GPP TSG-RAN WG1#NR Ad-Hoc Meeting, Spokane, WA, USA, 16–20 January, 2017; pp. 1–5. [Google Scholar]
- Ericsson. Design of CRC-assisted Polar Code (R1-1701630). In Proceedings of the 3GPP TSG RAN WG1 Meeting #88, Athens, Greece, 13–17 February 2017; pp. 1–7. [Google Scholar]
- Nokia. Alcatel-Lucent Shanghai Bell. Details of CRC distribution of Polar design (R1-1703497). In Proceedings of the 3GPP TSG RAN WG1 Meeting #88, Athens, Greece, 13–17 February 2017; pp. 1–7. [Google Scholar]
- Arikan, E. Systematic Polar Coding. IEEE Commun. Lett. 2011, 15, 860–862. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Wang, X. EXIT chart analysis of turbo multiuser detection. IEEE Trans. Wireless Commun. 2005, 4, 300–311. [Google Scholar]
- Taherzadeh, M.; Nikopour, H.; Bayesteh, A.; Baligh, H. SCMA Codebook Design. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014; pp. 1–5. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Full Name | Abbreviation | Full Name |
|---|---|---|---|
| 5G | Fifth generation | AWGN | Additive white Gaussian noise |
| BC | Bayes construction | BLER | Block error rate |
| BMC | Binary-input memoryless channel | BP | Belief propagation |
| CA | CRC-aided | CB | Code block |
| CBER | Code block error rate | CRC | cyclic redundancy check |
| DCA | Distributed CRC-aided | eMBB | enhanced Mobile BroadBand |
| EXIT | Extrinsic information transfer | FN | Function node |
| HC | Hybrid construction | IDD | Iterative detection and decoding |
| JIDD | Joint iterative detection and decoding | JIDS | Joint iterative detection and SCL decoding |
| JSC | Joint successive cancellation | LDPC | Low-density parity-check |
| LDPC-SCMA | LDPC coded sparse code multiple access | LDS | Low-density signatures |
| LLR | Log-likelihood rate ratio | log-BP | log-Belief propagation |
| mMTC | massive Machine Type Communications | MPA | Message passing algorithm |
| MUD | Multi-user detection | MUSA | Multi-user shared access |
| NOMA | Non-orthogonal multiple access | NR | New radio |
| OMA | Orthogonal multiple access | PCCA | Joint parity check and CRC aided |
| PC-SCMA | Polar-coded sparse code multiple access | PDMA | Pattern division multiple access |
| PE | Processing element | PIC | Partially information-coupled |
| QoS | Quality of service | SC | Successive cancellation |
| SCAN | Soft cancellation | SCL | Successive cancellation list |
| SCMA | Sparse code multiple access | SISO | Soft-input-soft-output |
| TB | Transport block | TBER | TB error rate |
| TC | Transfer characteristic | URLLC | Ultra-Reliable and Low Latency Communications |
| VN | Variable node |
| Parameters | Polar | LDPC | ||||
|---|---|---|---|---|---|---|
| PIC CA | CA (SCL) | CA (SCAN) [17] | ||||
| AWGN | K = 100 R = 1/2 | CBER | 0.22 | 0.5 | 1 | 2 |
| TBER | 0.22 | 0.52 | 1.03 | 2.02 | ||
| K = 64 R = 1/3 | CBER | 0.22 | 0.7 | 2.09 | 1.49 | |
| TBER | 0.25 | 0.75 | 2.12 | 1.52 | ||
| Rayleigh | K = 100 R = 1/2 | CBER | 0.23 | 0.5 | 1.91 | 2.57 |
| TBER | 0.25 | 0.52 | 1.93 | 2.59 | ||
| K = 64 R = 1/3 | CBER | 0.24 | 0.92 | 2.84 | 2 | |
| TBER | 0.27 | 0.95 | 2.88 | 2.04 | ||
| (dB) | PIC PCCA | PIC CA | CA (SCL) | CA (SCAN) [17] | |
|---|---|---|---|---|---|
| 2.5 | 5 | 5 | 5 | 5 | |
| 17.83 | 18.27 | 17.78 | 1 | ||
| 3 | 5 | 5 | 5 | 5 | |
| 16.2 | 17.89 | 14.94 | 1 | ||
| 3.5 | 4.79 | 5 | 4.96 | 5 | |
| 11.74 | 14.42 | 11.35 | 1 | ||
| 4 | 3.85 | 4.39 | 4.42 | 5 | |
| 8.08 | 10.1 | 8.45 | 1 | ||
| 4.5 | 2.91 | 3.34 | 3.55 | 4.95 | |
| 6.24 | 7.17 | 6.8 | 1 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Wang, Y. Improving Polar-Coded SCMA System by Information Coupling and Parity Check. Sensors 2020, 20, 6740. https://doi.org/10.3390/s20236740
Wu X, Wang Y. Improving Polar-Coded SCMA System by Information Coupling and Parity Check. Sensors. 2020; 20(23):6740. https://doi.org/10.3390/s20236740
Chicago/Turabian StyleWu, Xi, and Yafeng Wang. 2020. "Improving Polar-Coded SCMA System by Information Coupling and Parity Check" Sensors 20, no. 23: 6740. https://doi.org/10.3390/s20236740
APA StyleWu, X., & Wang, Y. (2020). Improving Polar-Coded SCMA System by Information Coupling and Parity Check. Sensors, 20(23), 6740. https://doi.org/10.3390/s20236740