A Geometry-Based Beamforming Channel Model for UAV mmWave Communications



Abstract
:1. Introduction
- (1)
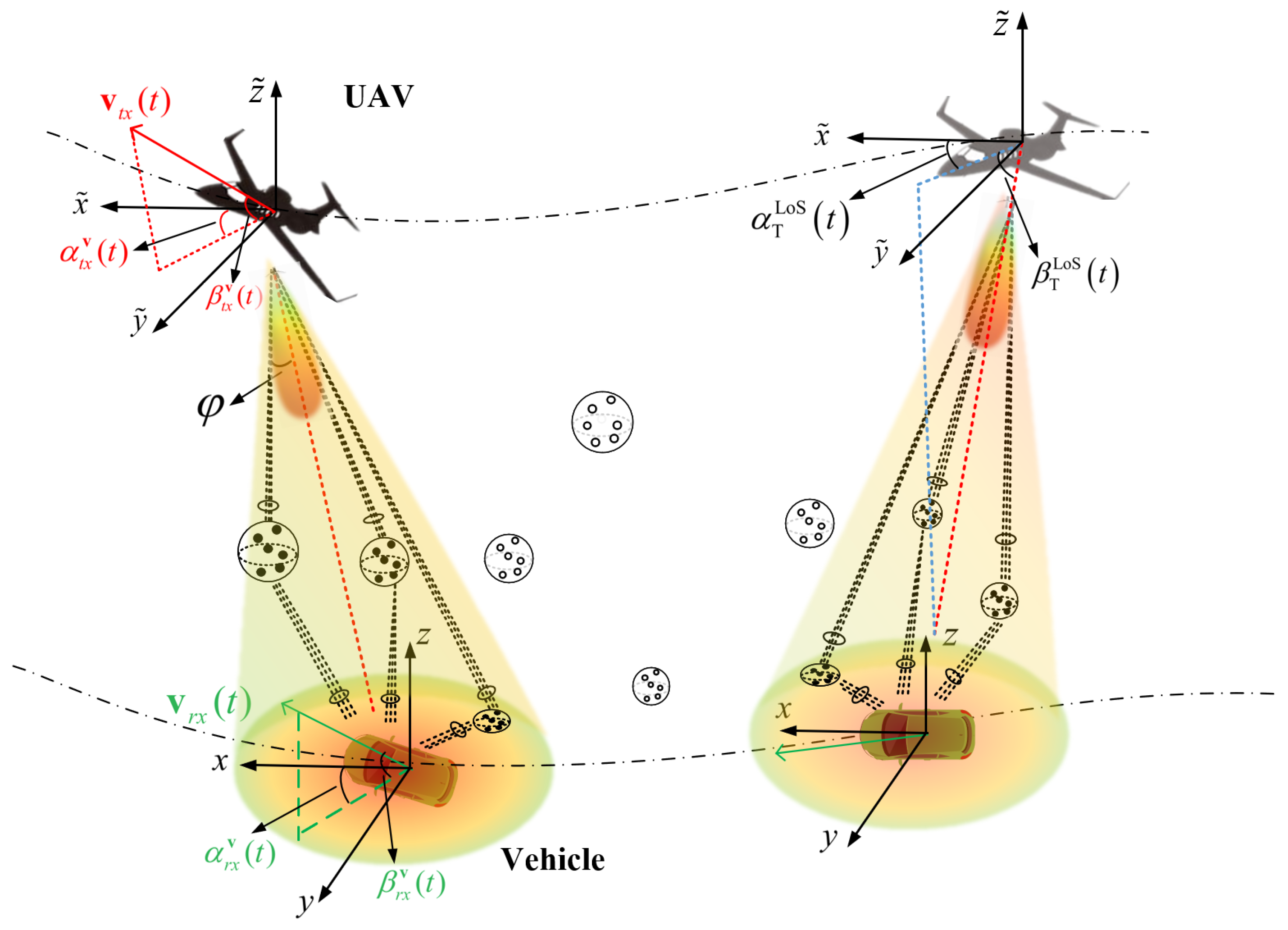
- A 3D GBSM for U2V mmWave beam channel considering the 3D arbitrary trajectory, 3D antenna array, and 3D beam-forming of UAV is proposed. To achieve the tradeoff between generality, accuracy, and complexity, the model only takes into account the line-of-sight (LoS) path, ground specular (GS) path, and two strongest single-bounce (SB) paths.
- (2)
- A hybrid computation method of channel parameters, i.e., geometry-based parameters and data-based parameters, for the proposed model is developed. The geometry-based parameters, e.g., the locations of terminals, the mean angles and delays of paths, are calculated by the time-variant but deterministic geometric relationships, and the data-based channel parameters, e.g., the angle offset and delay offset of the rays, the path powers, are generated randomly from the corresponding distribution fitted by RT simulation or measured data.
- (3)
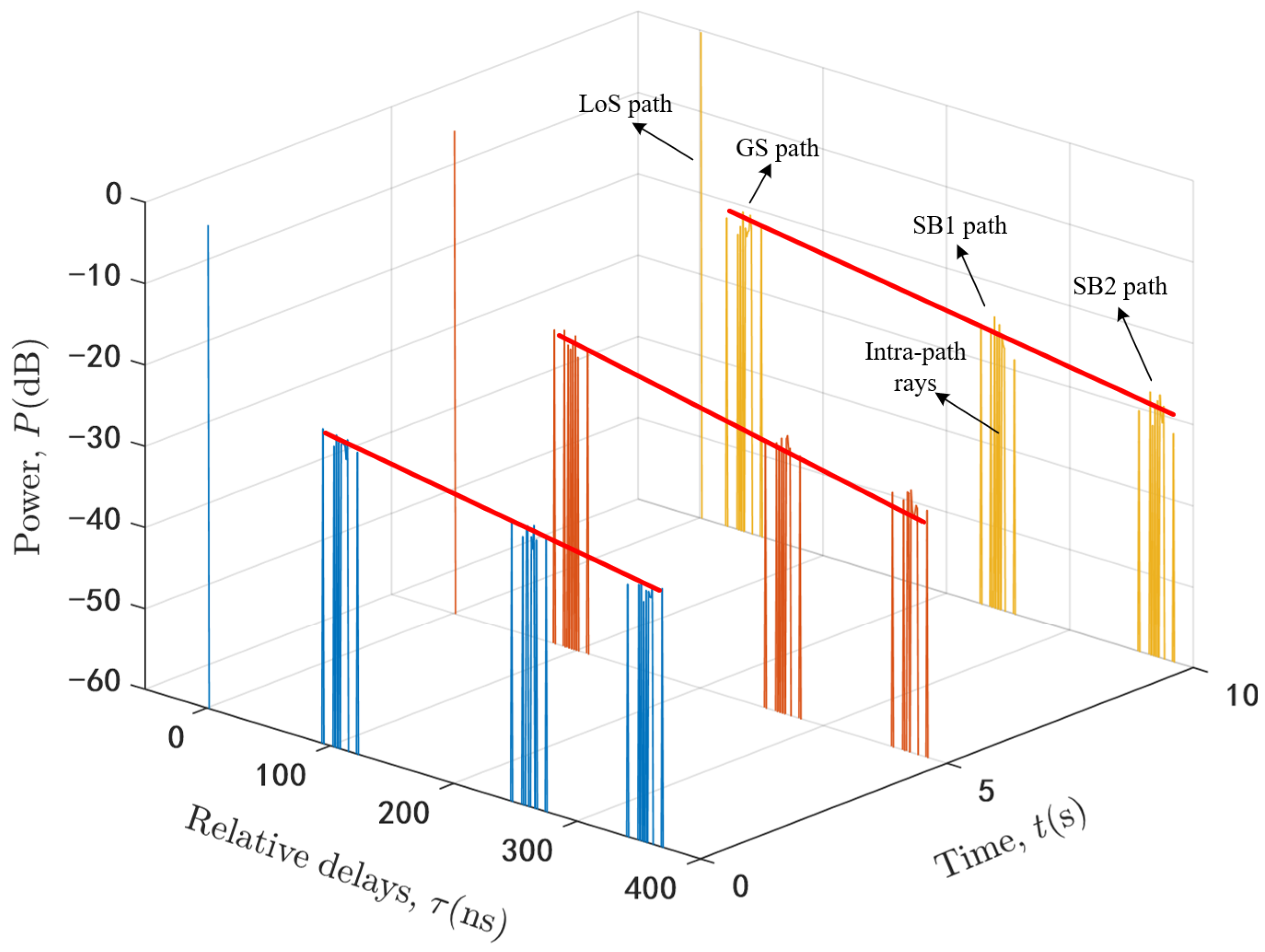
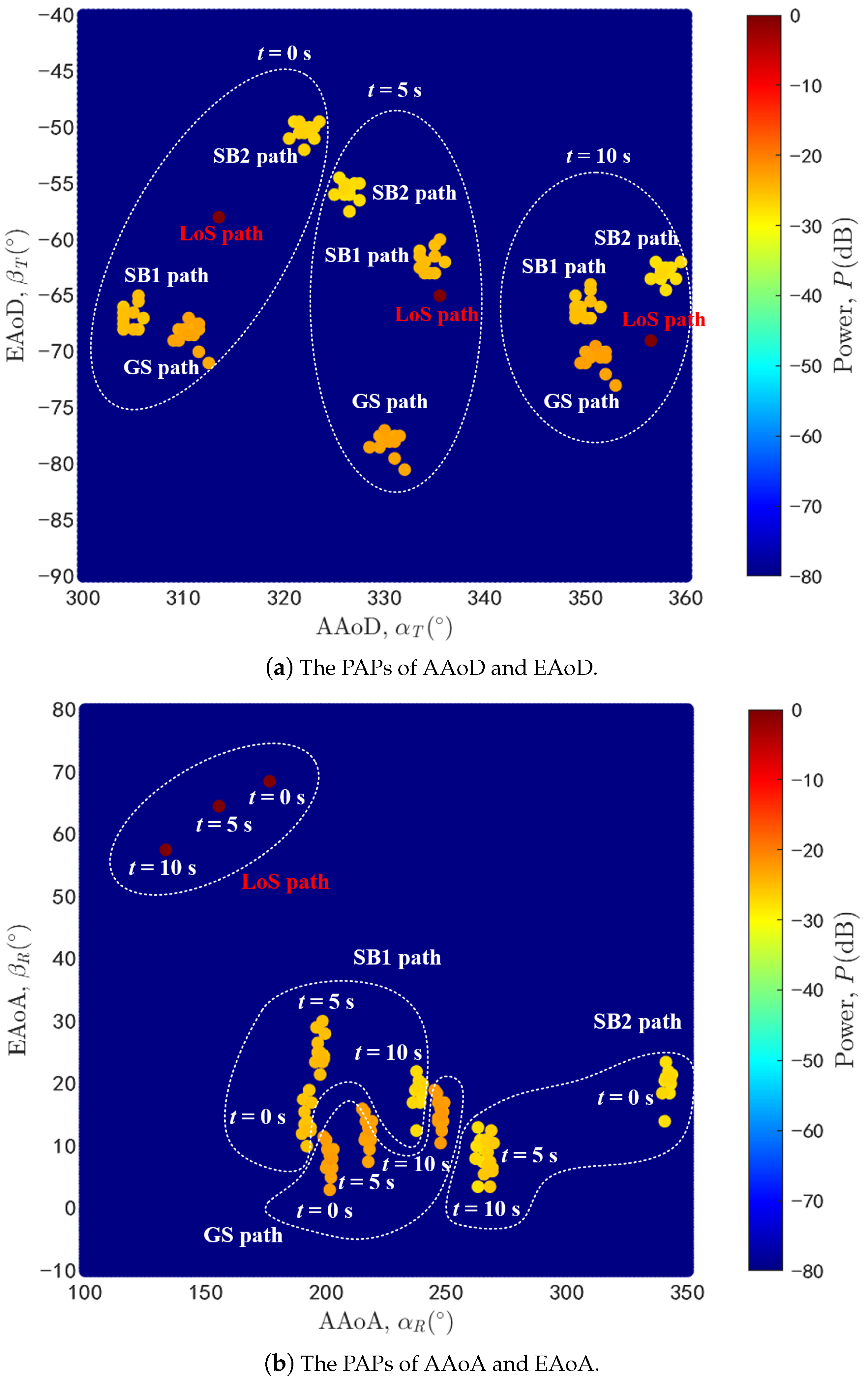
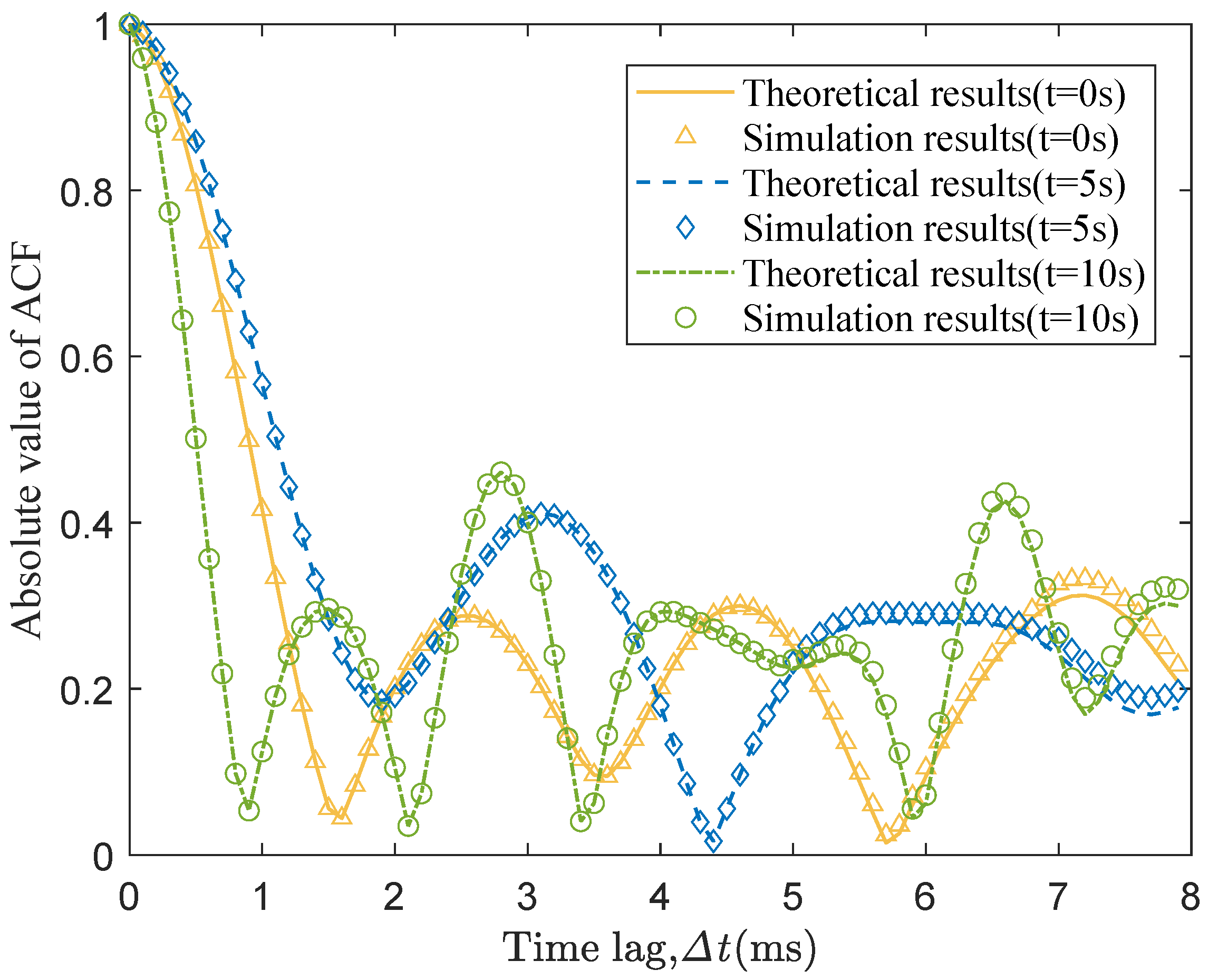
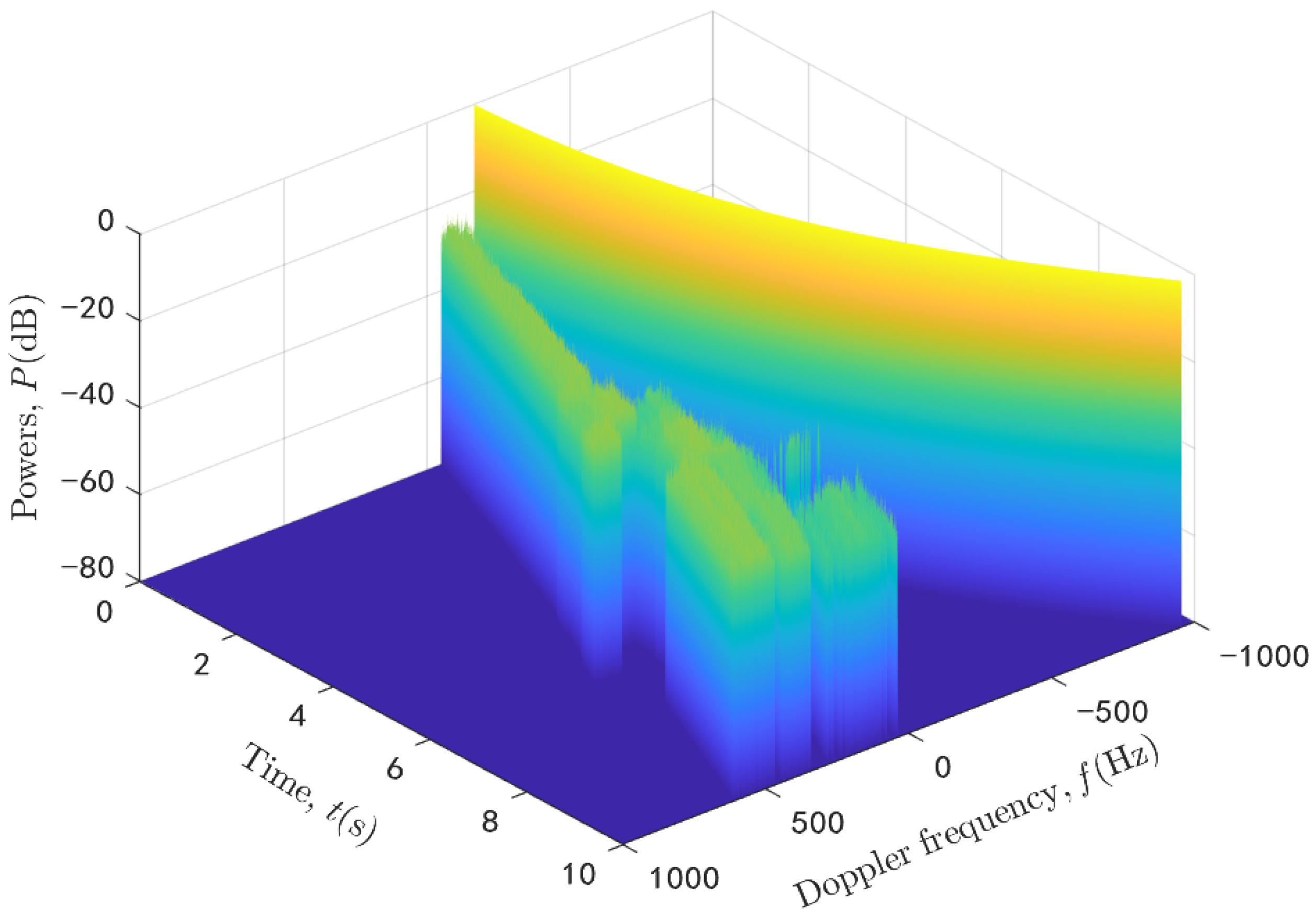
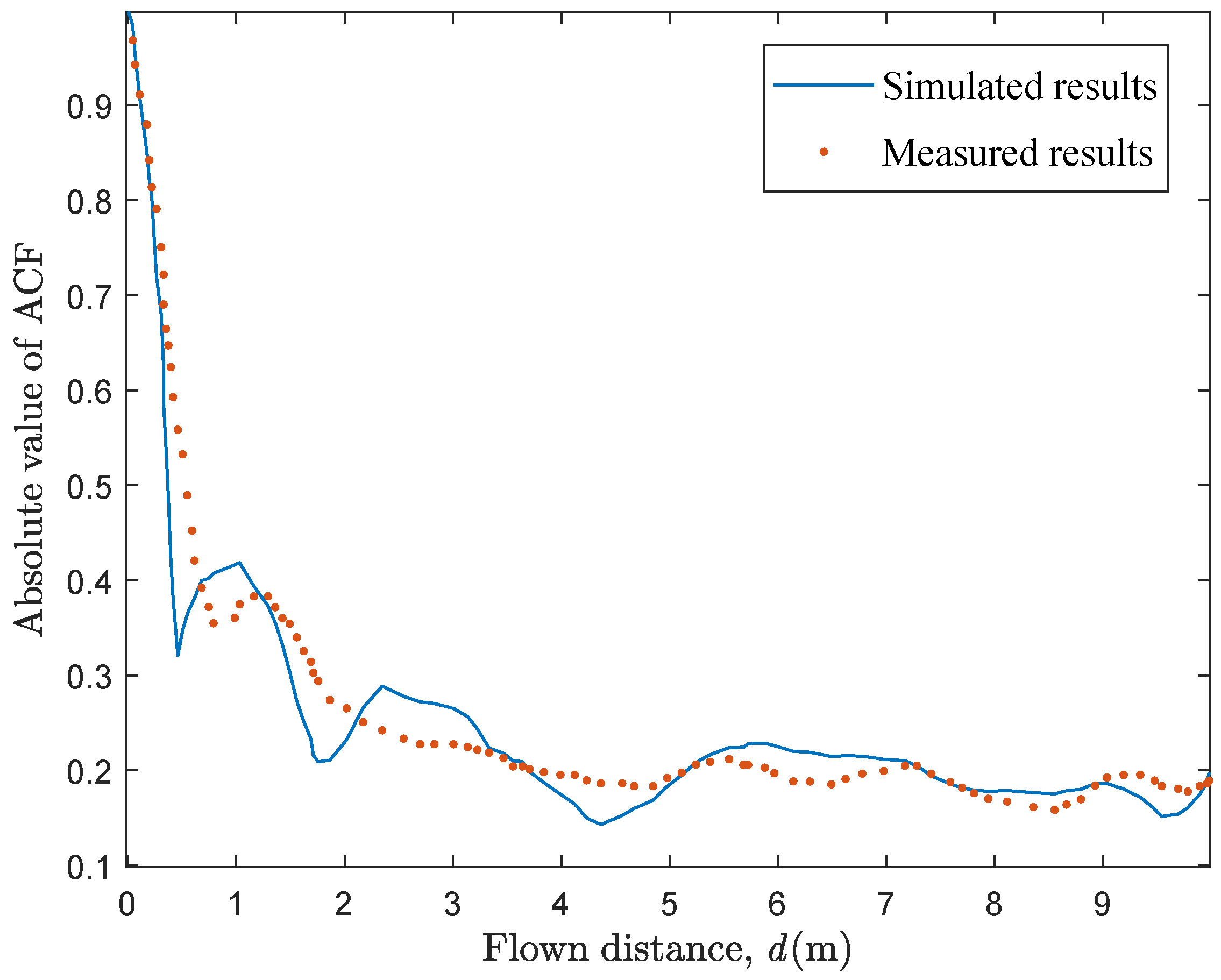
- Considering an urban U2V mmWave communication scenario, the channel parameters, i.e., path delays, received powers, and angles, are simulated and demonstrated. Moreover, the simulation results of the second order statistical properties, i.e., autocorrelation function (ACF) and Doppler power spectral density (DPSD), are also validated by theoretical and measured ones.
2. UAV mmWave Channel Model
3. Hybrid Computation Method of Channel Parameters
3.1. Geometry-Based Parameters
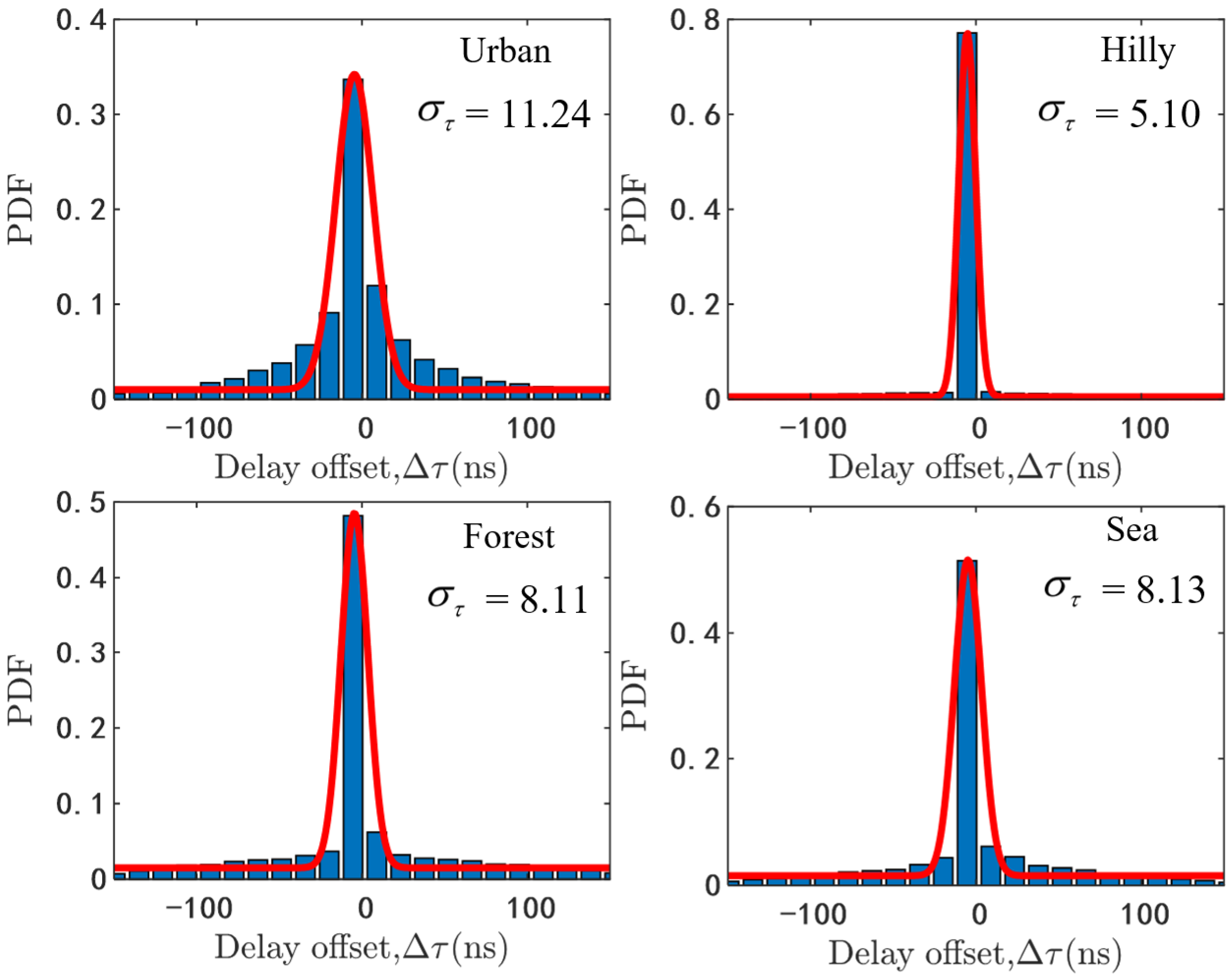
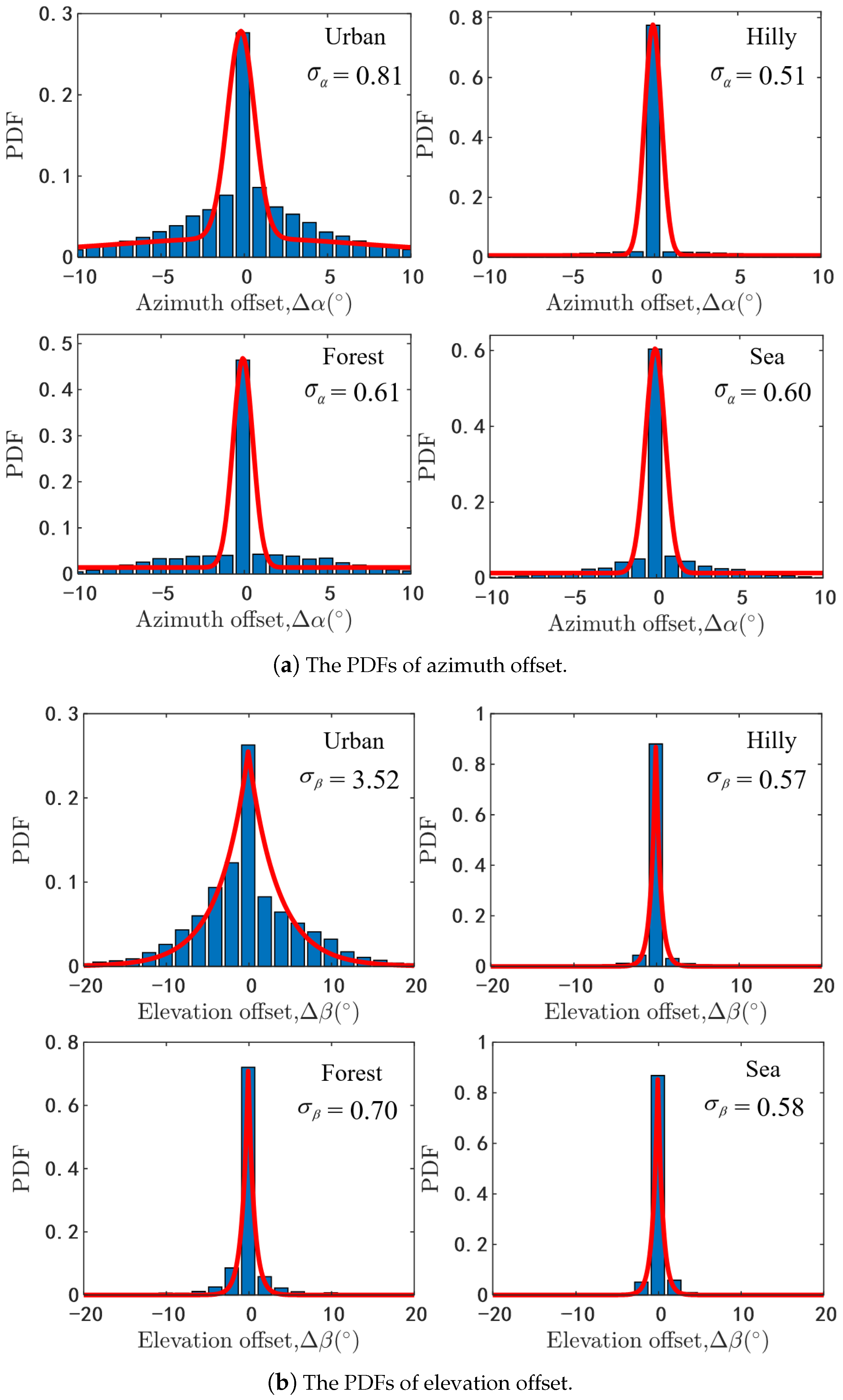
3.2. Data-Based Stochastic Parameters
4. Simulation Results and Validations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zeng, Y.; Wu, Q.; Zhang, R. Accessing from the sky: A tutorial on UAV communications for 5G and beyond. Proc. IEEE 2019, 107, 2327–2375. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhao, H.; Hou, S.; Zhao, Z.; Xu, H.; Wu, X.; Wu, Q.; Zhang, R. A survey on 5G millimeter wave communications for UAV-assisted wireless networks. IEEE Access 2019, 7, 117460–117504. [Google Scholar] [CrossRef]
- Zhong, W.; Xu, L.; Zhu, Q.; Chen, X.; Zhou, J. MmWave beamforming for UAV communications with unstable beam pointing. China Commun. 2019, 16, 37–46. [Google Scholar] [CrossRef]
- Zhong, W.; Xu, L.; Liu, X.; Zhu, Q.; Zhou, J. Adaptive beam design for UAV network with uniform plane array. Phys. Commun. 2019, 34, 58–65. [Google Scholar] [CrossRef]
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.; Schneckenburger, N. A survey of air-to-ground propagation channel modeling for unmanned aerial vehicles. IEEE Commun. Surv. Tutor. 2020, 34, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Cheng, X.; Li, Y. A 3-D geometry-based stochastic model for UAV-MIMO wideband non-stationary channels. IEEE Internet Things J. 2018, 6, 1654–1662. [Google Scholar] [CrossRef]
- Cui, Z.; Briso-Rodriguez, C.; Guan, K.; Calvo-Ramirez, C.; Ai, B.; Zhong, Z. Measurement-based modeling and analysis of UAV air-ground channels at 1 and 4 GHz. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1804–1808. [Google Scholar] [CrossRef]
- Chu, X.; Briso, C.; He, D.; Yin, X.; Dou, J. Channel modeling for low-altitude UAV in suburban environments based on ray tracer. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018; pp. 1–4. [Google Scholar]
- Chen, X.; Hu, X.; Zhu, Q.; Zhong, W.; Chen, B. Channel modeling and performance analysis for UAV relay systems. China Commun. 2018, 15, 89–97. [Google Scholar]
- Goddemeier, N.; Wietfeld, C. Investigation of air-to-air channel characteristics and a UAV specific extension to the Rice model. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015; pp. 1–5. [Google Scholar]
- Zheng, J.; Zhang, J.; Chen, S.; Zhao, H.; Ai, B. Wireless powered UAV relay communications over fluctuating two-ray fading channels. Phys. Commun. 2019, 35, 100724. [Google Scholar] [CrossRef]
- Chang, H.; Bian, J.; Wang, C.-X.; Aggoune, E.M. A 3D non-stationary wideband GBSM for low-altitude UAV-to-ground V2V MIMO channels. IEEE Access 2019, 7, 70719–70732. [Google Scholar] [CrossRef]
- Zhang, X.; Cheng, X. Three-dimensional non-stationary geometry-based stochastic model for UAV-MIMO Ricean fading channels. IET Commun. 2018, 13, 2617–2627. [Google Scholar] [CrossRef]
- Zhu, Q.; Jiang, K.; Chen, X.; Zhong, W.; Yang, Y. A novel 3D non-stationary UAV-MIMO channel model and its statistical properties. China Commun. 2018, 15, 147–158. [Google Scholar]
- Zhu, Q.; Wang, Y.; Jiang, K.; Chen, X.; Zhong, W.; Ahmed, N. 3D non-stationary geometry-based multi-input multi-output channel model for UAV-ground communication systems. IET Microw. Antennas Propag. 2019, 13, 1104–1112. [Google Scholar] [CrossRef]
- Huang, J.; Liu, Y.; Wang, C.-X.; Sun, J.; Xiao, H. 5G millimeter wave channel sounders, measurements, and models: Recent developments and future challenges. IEEE Commun. Mag. 2019, 57, 138–145. [Google Scholar] [CrossRef]
- Wang, C.-X.; Bian, J.; Sun, J.; Zhang, W.; Zhang, M. A survey of 5G channel measurements and models. IEEE Commun. Surv. Tutor. 2018, 20, 3142–3168. [Google Scholar] [CrossRef]
- Gonzalez-Plaza, A.; Calvo-Ramirez, C.; Briso-Rodriguez, C.; Garcia-Loygorri, J.M.; Oliva, D.; Alonso, J.I. Propagation at mmW band in metropolitan railway tunnels. Wirel. Commun. Mob. Comput. 2017, 2018, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Yin, X.; Zheng, G. Experimental investigation of millimeter-wave MIMO channel characteristics in tunnel. IEEE Access 2019, 7, 108395–108399. [Google Scholar] [CrossRef]
- Bas, C.U.; Wang, R.; Sangodoyin, S.; Hur, S.; Whang, K.; Park, J.; Zhang, J.; Molisch, A.F. 28 GHz propagation channel measurements for 5G microcellular environments. In Proceedings of the 2018 International Applied Computational Electromagnetics Society Symposium (ACES), Denver, CO, USA, 25–29 March 2018; pp. 1–2. [Google Scholar]
- Fu, Z.; Cui, H.; Geng, S.; Zhao, X. 5G Millimeter Wave Channel Modeling and Simulations for a High-Voltage Substation. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019; pp. 1822–1826. [Google Scholar]
- Yang, G.; Zhang, Y.; He, Z.; Wen, J.; Ji, Z.; Li, Y. Machine-learning-based prediction methods for path loss and delay spread in air-to-ground millimetre-wave channels. IET Microw. Antennas Propag. 2019, 13, 1113–1121. [Google Scholar] [CrossRef]
- Khawaja, W.; Ozdemir, O.; Guvenc, I. Temporal and spatial characteristics of mm wave propagation channels for UAVs. In Proceedings of the 2018 11th Global Symposium on Millimeter Waves (GSMM), Boulder, CO, USA, 22–24 May 2018; pp. 1–6. [Google Scholar]
- Michailidis, E.T.; Nomikos, N.; Trakadas, P.; Kanatas, A.G. Three-dimensional modeling of mmWave doubly massive MIMO aerial fading channels. IEEE Trans. Veh. Technol. 2020, 69, 1190–1202. [Google Scholar] [CrossRef]
- Cheng, L.; Zhu, Q.; Wang, C.-X.; Zhong, W.; Hua, B.; Jiang, S. Modeling and simulation for UAV air-to-ground mmWave channels. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar]
- 3GPP TR 38.901. Study on Channel Model for Frequencies from 0.5 to 100 GHz. Available online: ftp://www.3gpp.org/specs/archive/38_series/38.901 (accessed on 17 May 2019).
- Zhong, W.; Gu, Y.; Zhu, Q.; Li, P.; Chen, X. A novel spatial beam training strategy for mmWave UAV communications. Phys. Commun. 2020, 41, 101106. [Google Scholar] [CrossRef]
- Simunek, M.; Fontan, F.P.; Pechac, P. The UAV low elevation propagation channel in urban areas: Statistical analysis and time-series generator. IEEE Trans. Antennas Propag. 2013, 61, 3850–3858. [Google Scholar] [CrossRef]
- Cid, E.L.; Alejos, A.V.; Sanchez, M.G. Signaling through scattered vegetation: Empirical loss modeling for low elevation angle satellite paths obstructed by isolated thin trees. IEEE Veh. Technol. Mag. 2016, 11, 22–28. [Google Scholar]
- Khawaja, W.; Ozdemir, O.; Guvenc, I. UAV air-to-ground channel characterization for mmWave systems. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Geise, R.; Weiss, A.; Neubauer, B. Modulating features of field measurements with a UAV at millimeter wave frequencies. In Proceedings of the 2018 IEEE Conference on Antenna Measurements & Applications (CAMA), Vasteras, Sweden, 3–6 September 2018; pp. 1–4. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Value | Definition | Value |
|---|---|---|---|
| m/s | m/s | ||
| m | K | 7 dB | |
| 400 m | 100 m | ||
| M | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, K.; Zhu, Q.; Song, M.; Hua, B.; Zhong, W.; Ye, X. A Geometry-Based Beamforming Channel Model for UAV mmWave Communications. Sensors 2020, 20, 6957. https://doi.org/10.3390/s20236957
Mao K, Zhu Q, Song M, Hua B, Zhong W, Ye X. A Geometry-Based Beamforming Channel Model for UAV mmWave Communications. Sensors. 2020; 20(23):6957. https://doi.org/10.3390/s20236957
Chicago/Turabian StyleMao, Kai, Qiuming Zhu, Maozhong Song, Boyu Hua, Weizhi Zhong, and Xijuan Ye. 2020. "A Geometry-Based Beamforming Channel Model for UAV mmWave Communications" Sensors 20, no. 23: 6957. https://doi.org/10.3390/s20236957
APA StyleMao, K., Zhu, Q., Song, M., Hua, B., Zhong, W., & Ye, X. (2020). A Geometry-Based Beamforming Channel Model for UAV mmWave Communications. Sensors, 20(23), 6957. https://doi.org/10.3390/s20236957