Multi-Parameter Measurement of Rotors Using the Doppler Effect of Frequency-Swept Interferometry




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory
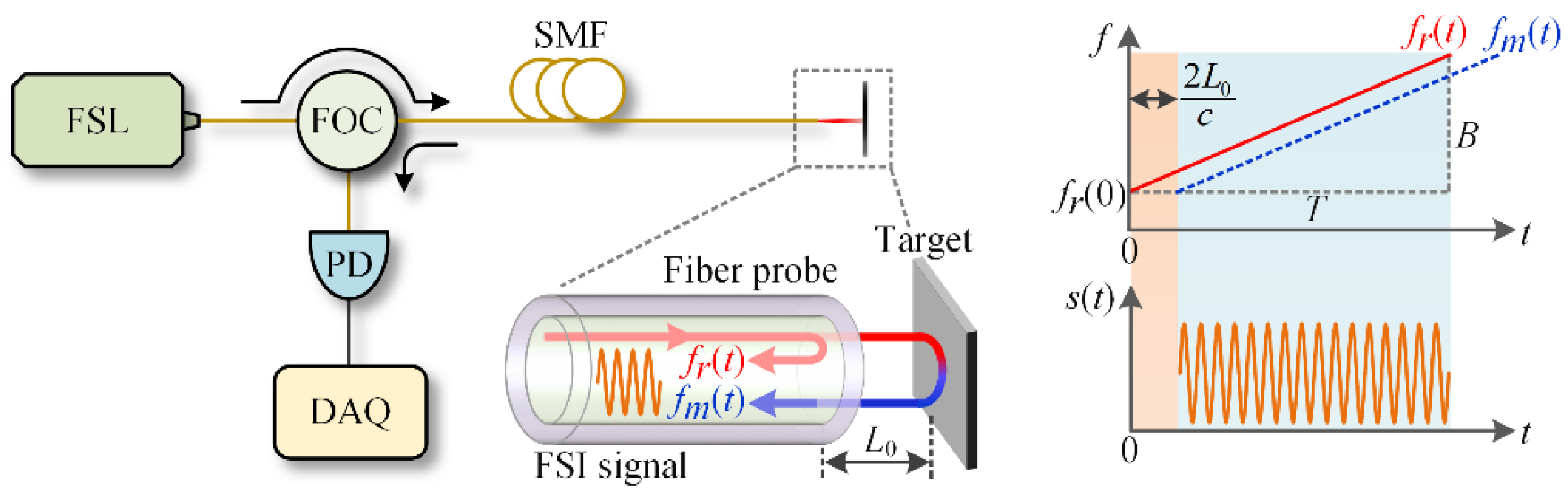
2.1. The Basics of FSI
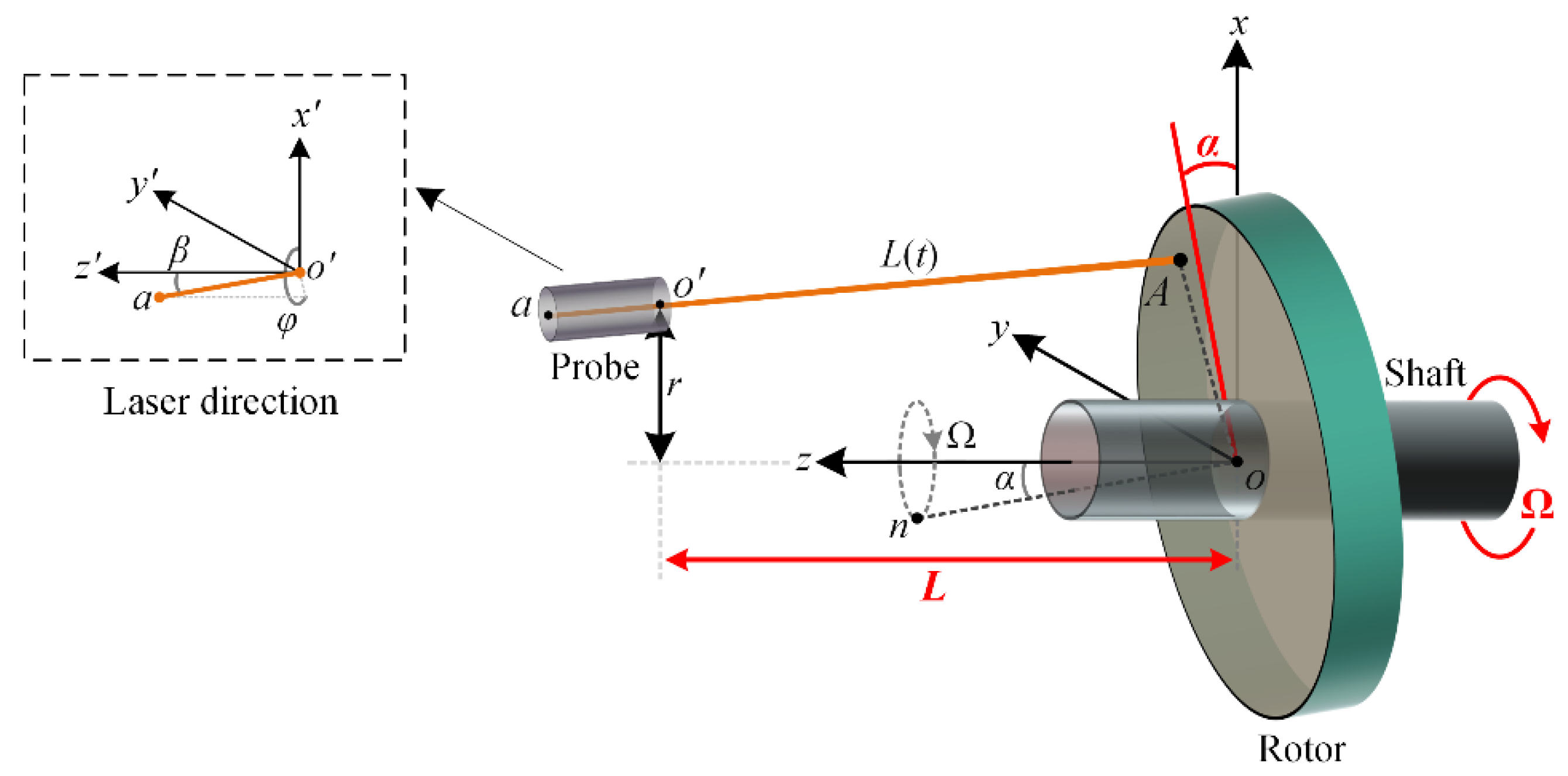
2.2. Multi-Parameter Measurement Method for the Rotor
3. Experiments and Results
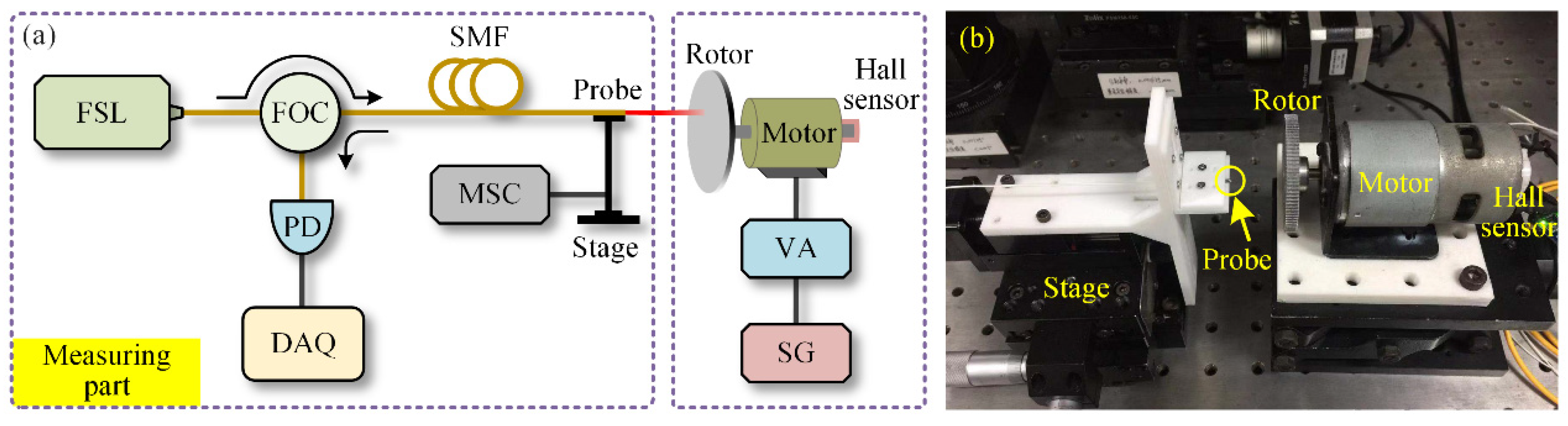
3.1. Experimental Setup
3.2. Results and Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Upper Bound of the Relative Error in the Estimation of α
References
- Hu, G.; Gao, W.; Chen, Y.; Zhang, D.; Tian, Y.; Qi, X.; Zhang, H. An experimental study on the rotational accuracy of variable preload spindle-bearing system. Adv. Mech. Eng. 2018, 10, 1–14. [Google Scholar] [CrossRef]
- Agnes, M. Vibrational diagnostics of rotating machinery malfunctions. Int. J. Rotating Mach. 1995, 1, 237–266. [Google Scholar]
- Vafaei, S.; Rahnejat, H. Indicated repeatable runout with wavelet decomposition (IRR-WD) for effective determination of bearing-induced vibration. J. Sound Vib. 2003, 260, 67–82. [Google Scholar] [CrossRef]
- Wefky, M.; Khalik, A.S.A.; Ahmed, S.; Arabawy, I.F.E. Performance evaluation of five-phase outer-rotor Permanent magnet vernier machines. In Proceedings of the Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016. [Google Scholar]
- Glowacz, A. Diagnostics of rotor damages of three-phase induction motors using acoustic signals and SMOFS-20-EXPANDED. Arch. Acoust. 2016, 41, 507–515. [Google Scholar] [CrossRef]
- Qu, L.; Lin, J.; Liao, Y.; Zhao, M. Changes in rotor response characteristics based diagnostic method and its application to identification of misalignment. Measurement 2019, 138, 91–105. [Google Scholar] [CrossRef]
- Abdul-Aziz, A.; Woike, M. Turbine rotor disk health monitoring assessment based on sensor technology and spin tests data. Sci. World J. 2013, 2013, 413587. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdul-Aziz, A.; Woike, M.R.; Oza, N.C.; Matthews, B.L.; Lekki, J.D. Rotor health monitoring combining spin tests and data-driven anomaly detection methods. Struct. Health Monit. 2011, 11, 3–12. [Google Scholar] [CrossRef]
- Gyekenyesi, A.L.; Baaklini, G.Y.; Baaklini, G.Y.; Boltz, E.S.; Shepard, S.M.; Shull, P.J. Rotor health monitoring and damage detection utilizing a disk spin simulation system. In Proceedings of the 6th Annual International Symposium on NDE for Health Monitoring and Diagnostics, Newport Beach, CA, USA, 4–8 March 2001. [Google Scholar]
- Matikas, T.E.; Abdul-Aziz, A.; Woike, M.; Baaklini, G.; Bodis, J.R. Turbine engine disk rotor health monitoring assessment using spin tests data. In Proceedings of the International Society for Optical Engineering, San Diego, CA, USA, 12–14 March 2012. [Google Scholar]
- Jain, J.R.; Kundra, T.K. Model based online diagnosis of unbalance and transverse fatigue crack in rotor systems. Mech. Res. Commun. 2004, 31, 557–568. [Google Scholar] [CrossRef]
- Eggers, A.J.; Digumarthi, R.; Chaney, K. Wind shear and turbulence effects on rotor fatigue and loads control. J. Sol. Energy Eng. 2003, 125, 402–409. [Google Scholar] [CrossRef]
- Huang, L.; Wu, Z.; Wang, K. Indirect measurement of rotor dynamic imbalance for control moment gyroscopes via gimbal disturbance observer. Sensors 2018, 18, 1873. [Google Scholar] [CrossRef] [Green Version]
- Qiu, J.; Tani, J.; Kwon, T. Control of self-excited vibration of a rotor system with active gas bearings. J. Vib. Acoust. 2003, 125, 328–334. [Google Scholar] [CrossRef]
- Jia, B.; Lei, H.; Yong, F.; Zhai, J.; Gang, Q. The development of aero-engine tip-clearance measurement technology: A simple review. In Proceedings of the 2017 IEEE 13th International Conference on Electronic Measurement & Instruments, Yangzhou, China, 20–23 October 2017. [Google Scholar]
- Yu, B.; Ke, H.; Shen, E.; Zhang, T. A review of blade tip clearance–measuring technologies for gas turbine engines. Meas. Control. 2020, 53, 339–357. [Google Scholar] [CrossRef] [Green Version]
- Garcia, I.; Zubia, J.; Beloki, J.; Arrue, J.; Durana, G.; Aldabaldetreku, G. Optical tip clearance measurements as a tool for rotating disk characterization. Sensors 2017, 17, 165. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Garcia, I.; Przysowa, R.; Amorebieta, J.; Zubia, J. Tip-clearance measurement in the first stage of the compressor of an aircraft engine. Sensors 2016, 16, 1897. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Garcia, I.; Zubia, J.; Durana, G.; Aldabaldetreku, G.; Illarramendi, M.A.; Villatoro, J. Optical fiber sensors for aircraft structural health monitoring. Sensors 2015, 15, 15494–15519. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, H.; Duan, F.; Wu, G.; Zhang, J. Blade tip clearance measurement of the turbine engines based on a multi-mode fiber coupled laser ranging system. Rev. Sci. Instrum. 2014, 85, 115105. [Google Scholar] [CrossRef] [PubMed]
- Garcia, I.; Beloki, J.; Zubia, J.; Aldabaldetreku, G.; Illarramendi, M.A.; Jimenez, F. An optical fiber bundle sensor for tip clearance and tip timing measurements in a turbine rig. Sensors 2013, 13, 7385–7398. [Google Scholar] [CrossRef] [PubMed]
- Jia, B.; Zhang, X. An optical fiber blade tip clearance sensor for active clearance control applications. Procedia Eng. 2011, 15, 984–988. [Google Scholar]
- Zhang, F.M.; Li, Y.T.; Pan, H.; Shi, C.Z.; Qu, X.H. Vibration compensation of the frequency-scanning-interferometry-based absolute ranging system. Appl. Sci. 2019, 9, 147. [Google Scholar] [CrossRef] [Green Version]
- Jia, X.Y.; Liu, Z.G.; Deng, Z.W.; Deng, W.; Wang, Z.Y.; Zhen, Z.L. Dynamic absolute distance measurement by frequency sweeping interferometry based Doppler beat frequency tracking model. Opt. Commun. 2019, 430, 163–169. [Google Scholar] [CrossRef]
- Lu, C.; Xiang, Y.; Gan, Y.; Liu, B.; Chen, F.; Liu, X.; Liu, G. FSI-based non-cooperative target absolute distance measurement method using PLL correction for the influence of a nonlinear clock. Opt. Lett. 2018, 43, 2098–2101. [Google Scholar] [CrossRef] [PubMed]
- Yu, W.; Pfeiffer, P.; Morsali, A.; Yang, J.; Fontaine, J. Comb-calibrated frequency sweeping interferometry for absolute distance and vibration measurement. Opt. Lett. 2019, 44, 5069–5072. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Liu, B.; Wang, H.; Zhao, B. Absolute distance measurement using frequency-scanning interferometry based on hilbert phase subdivision. Sensors 2019, 19, 5132. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tao, L.; Liu, Z.; Zhang, W.; Liu, Z.; Hong, J. Real-time drift error compensation in a self-reference frequency-scanning fiber interferometer. Opt. Commun. 2017, 382, 99–104. [Google Scholar] [CrossRef]
- Tao, L.; Liu, Z.; Zhang, W.; Zhou, Y. Frequency-scanning interferometry for dynamic absolute distance measurement using Kalman filter. Opt. Lett. 2014, 39, 6997–7000. [Google Scholar] [CrossRef] [PubMed]
- Shafir, E.; Berkovic, G. Compact fibre optic probe for simultaneous distance and velocity determination. Meas. Sci. Technol. 2001, 12, 943–947. [Google Scholar]
- Schneider, R.; Thurmel, P.; Stockmann, M. Distance measurement of moving objects by frequency modulated laser radar. Opt. Eng. 2001, 40, 33–37. [Google Scholar] [CrossRef]
- Shao, B.; Zhang, W.; Zhang, P.; Chen, W. Dynamic clearance measurement using fiber-optic frequency-swept and frequency-fixed interferometry. IEEE Photonics Technol. Lett. 2020, 32, 1331–1334. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, B.; Zhang, W.; Zhang, P.; Chen, W. Multi-Parameter Measurement of Rotors Using the Doppler Effect of Frequency-Swept Interferometry. Sensors 2020, 20, 7178. https://doi.org/10.3390/s20247178
Shao B, Zhang W, Zhang P, Chen W. Multi-Parameter Measurement of Rotors Using the Doppler Effect of Frequency-Swept Interferometry. Sensors. 2020; 20(24):7178. https://doi.org/10.3390/s20247178
Chicago/Turabian StyleShao, Bin, Wei Zhang, Peng Zhang, and Weimin Chen. 2020. "Multi-Parameter Measurement of Rotors Using the Doppler Effect of Frequency-Swept Interferometry" Sensors 20, no. 24: 7178. https://doi.org/10.3390/s20247178
APA StyleShao, B., Zhang, W., Zhang, P., & Chen, W. (2020). Multi-Parameter Measurement of Rotors Using the Doppler Effect of Frequency-Swept Interferometry. Sensors, 20(24), 7178. https://doi.org/10.3390/s20247178