Review of Structural Health Monitoring Methods Regarding a Multi-Sensor Approach for Damage Assessment of Metal and Composite Structures


Abstract
:1. Introduction
- Application of SHM, loads and usage monitoring for flaw indication and monitoring
- Structural analysis to assess the effects of flaws on structural functions and strength
- Implementation of condition- and prediction- based maintenance under consideration of regulation and safety standards
2. Data Fusion Overview
- Raw data fusion level: Multi-sensor data can be directly evaluated or combined to a sensitive feature for, e.g., detection, localization, quantification, and typification of damage, if the same physical phenomenon is measured by, e.g., classic detection and estimation methods (e.g., Kalman filter).
- Feature data fusion level: Several representative damage indicators (of different damage features) are extracted from multi-sensor data and collected in a vector, which is evaluated by, e.g., pattern recognition approaches based on neural networks, clustering algorithms, or template methods.
- Decision level fusion: Evaluation results from different damage assessment methods, e.g., detection, localization, quantification, and typification, are used for joint evaluation and decisions on consequences by, e.g., weighted decision methods (voting techniques), classical inference, Bayesian inference, and evidence theory (Dempster–Shafer method).
- Which SHM assessment methods are appropriate and optimal for the considered structure and its damages of interest?
- What are the sensitive features for damage assessment?
- How should the data be fused (fusion system architecture)?
- What is the accuracy and reliability of the data fusion results?
- What are the environmental influences on the sensor data and their fusion-based evaluation?
- What is the range of operation of the defined data fusion architecture, i.e., within which boundary values (of structural data) does fusion improve the result?
- How can the data fusion accuracy and reliability be optimized dynamically?
3. Fundamental SHM Methods
3.1. Static Strain Measurements with Fiber Optical Sensors (FOS)
3.2. Conductivity Measurements with Electrical Impedance Tomography (EIT)
3.2.1. EIT with Conductive Surface Layers
- detection (SHM Level 1), by definition of, e.g., a threshold for a statistically based metric M();
- localization (SHM Level 2), by, e.g., considering the area of largest conductivity change max(); and
- size estimation (SHM Level 3), by, e.g., evaluation of the conductivity change rate or definition of a critical threshold value for rupture by learning algorithms [49].
3.2.2. EIT with Conductive Structural Components
3.3. Vibration Analyses with Electro-Mechanical Impedance Method
3.4. Ultrasonic Guided Waves (UGW)
- shear (horizontal and vertical);
- Lamb; and
- Rayleigh waves.
- The propagation speed and attenuation (energy loss due to traveling) of UGWs depend on the structure’s material properties (elastic modulus, density, and damping) and geometrical properties (e.g., wall thickness, material phase transitions, micro (matrix) cracks, and surface roughness).
- The wave packets are reflected by sudden changes of these properties (e.g., due to cracks or corrosion in metal and cracks or delamination in composite).
3.4.1. Damage Detection and Localization with UGW
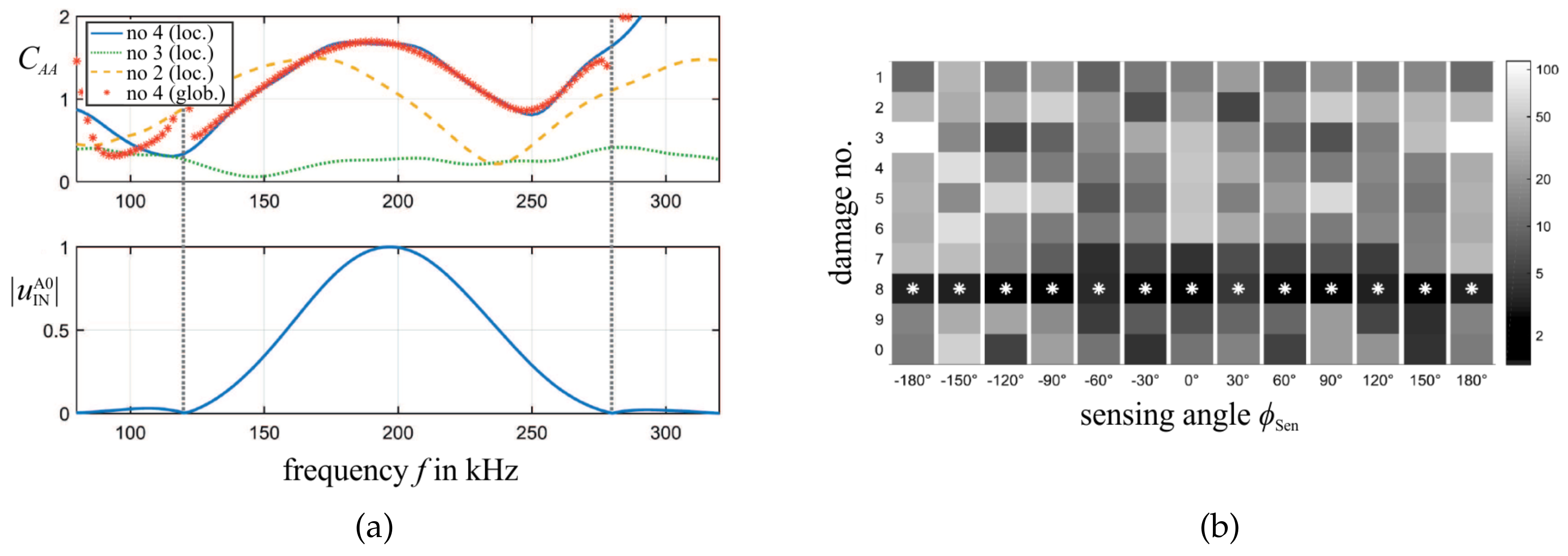
3.4.2. Damage Identification with UGW
3.5. Summary of Damage Assessment Capabilities of SHM Methods
4. Multi-Sensor Approach to SHM of Metal and Composite Structures
4.1. Selection of SHM Methods and Sensors
- optimal sensor positions for the intended measurement (excitation and measurement);
- robustness (measurement signal, equipment reliability, etc.);
- geometrical and physical constraints of the considered structure (volume, weight, curved surfaces, etc.);
- environmental constraints (areas prone to dirt, moisture, high temperature, etc.); and
- monetary constraints (sensor or measurement equipment).
- UGW method for far field sensing and SHM Level 4 assessment by linear and nonlinear scattering effects; and
- EMI method for self diagnosis and local SHM Level 3 assessment by linear and nonlinear effects.
- EIT for spatial SHM Level 3 damage assessment if the structure is conductive (CFRP); and
- strain measurements by FOS to reliably assess large blisters
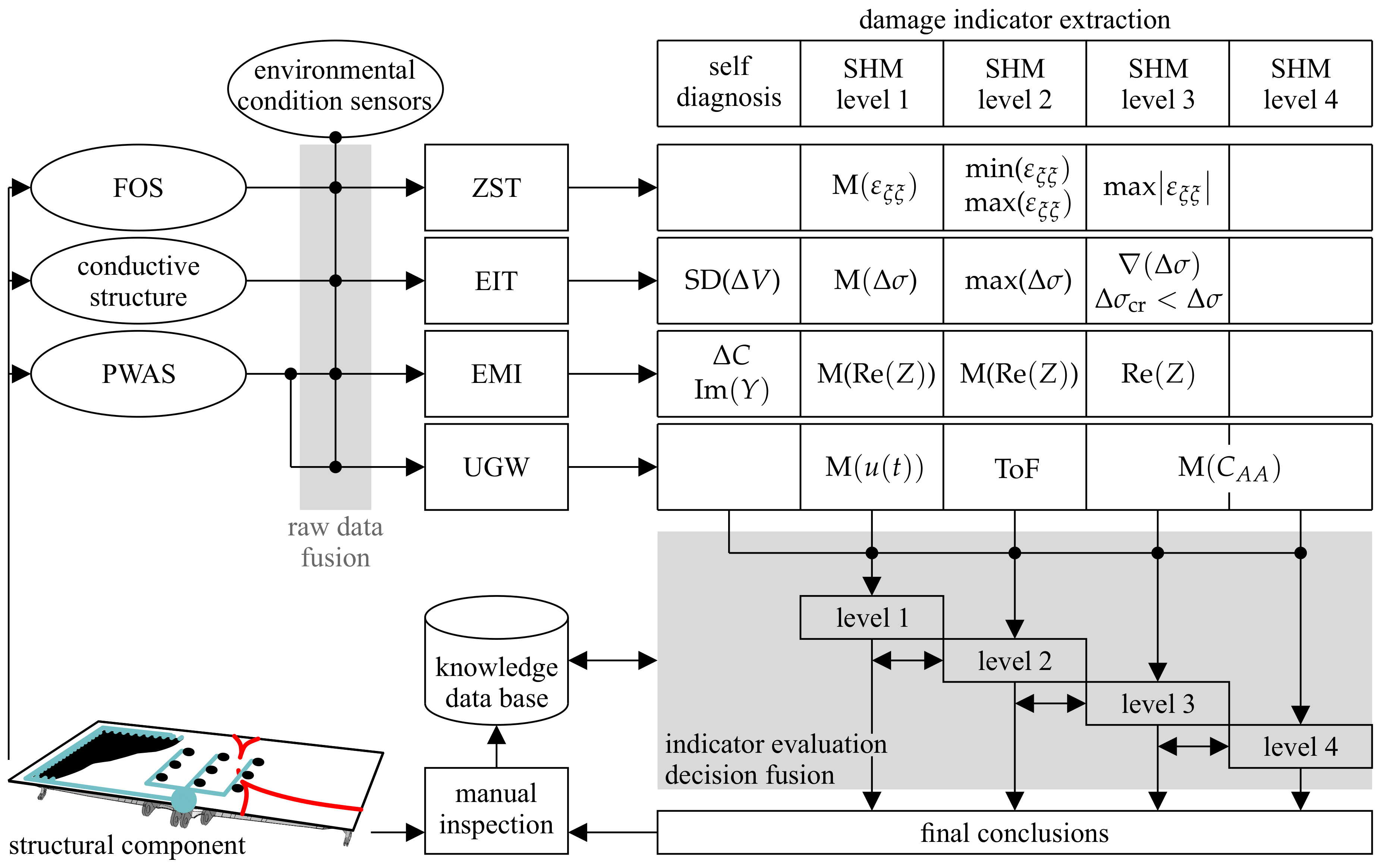
4.2. Definition of Data Evaluation Procedure
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Viechtbauer, C.; Schagerl, M.; Schröder, K.-U. From NDT over SHM to SHC - the future for wind turbines. In Proceedings of the 9th IWSHM, Standford, CA, USA, 10–12 September 2013; pp. 54–57. [Google Scholar]
- Rytter, A. Vibration based inspection of Civil Engineering. Ph.D. Thesis, Department of Building Technology and Structural Engineering, Aalborg University, Aalborg, Denmark, 1993. [Google Scholar]
- Viechtbauer, C.; Schröder, K.-U.; Schagerl, M. Structural Health Control—A comprehensive concept for observation and assessment of damages. In Proceedings of the 13th Mechatronics Forum International Conference, Linz, Austria, 17–19 December 2012; pp. 599–604. [Google Scholar]
- Viechtbauer, C. A novel approach to monitor and assess damages in lightweight structures. Ph.D. Thesis, Institute of Structural Lightweight Design, JKU Linz, Linz, Austria, 2015. [Google Scholar]
- Gschossmann, S.; Humer, C.; Schagerl, M. Lamb wave excitation and detection with piezoelectric elements: Essential aspects for a reliable numerical simulation. In Proceedings of the 8th EWSHM, Bilbao, Spain, 5–8 July 2016. [Google Scholar]
- Humer, C.; Kralovec, C.; Schagerl, M. Scattering Analysis of Lamb Waves at Subsurface Cracks in Isotropic Plates. In Proceedings of the 8th ECCOMAS Thematic Conference on Smart Structures and Materials, Madrid, Spain, 5–8 June 2017; pp. 1843–1853. [Google Scholar]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors, 2nd ed.; Elsevier Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Yeasin Bhuiyan, M.; Shen, Y.; Giurgiutiu, V. Interaction of Lamb waves with rivet hole cracks from multiple directions. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2017, 231, 2974–2987. [Google Scholar] [CrossRef]
- Scala, C.M.; Bowles, S.J.; Scott, I.G. The development of acoustic emission for structural integrity monitoring of aircraft. Int. Adv. Nondestr. Test. 1988, 14, 219–258. [Google Scholar]
- Soman, R.N.; Malinowski, P.; Majewska, K.; Mieloszyk, M.; Ostachowicz, W. Kalman filter based neutral axis tracking in composites under varying temperature conditions. Mech. Syst. Signal Process. 2018, 110, 485–498. [Google Scholar] [CrossRef]
- Zhao, Y.; Viechtbauer, C.; Loh, K.J.; Schagerl, M. Enhancing the Strain Sensitivity of Carbon Nanotube-Polymer Thin Films For Damage Detection and Structural Monitoring. In Proceedings of the 11th International Workshop on Advanced Smart Materials and Smart Structures Technology, Urbana-Champaign, Urbana, IL, USA, 1–2 August 2015. [Google Scholar]
- Zhao, Y.; Schagerl, M. Shear Stress Monitoring of a Single-Lap Joint Using Inkjet-Printed Carbon Nanotube Strain Distribution Sensor. In Proceedings of the 8th EWSHM, Bilbao, Spain, 5–8 July 2016. [Google Scholar]
- Zhao, Y.; Schagerl, M.; Gschossmann, S.; Kralovec, C. In-situ spatial strain monitoring of a single-lap joint using inkjet-printed carbon nanotube embedded thin films. Struct. Health Monit. 2018, 18, 1479–1490. [Google Scholar] [CrossRef]
- Nonn, S.; Schagerl, M.; Zhao, Y.; Gschossmann, S.; Kralovec, C. Application of electrical impedance tomography to an anisotropic carbon fiber-reinforced polymer composite laminate for damage localization. Compos. Sci. Technol. 2018, 160, 231–236. [Google Scholar] [CrossRef]
- Kralovec, C.; Schagerl, M. Electro-mechanical impedance measurements as a possible SHM method for sandwich debonding detection. In Proceedings of the 21st Symposium on Composites, Bremen, Germany, 5–7 July 2017; pp. 763–777. [Google Scholar]
- Kralovec, C.; Erlinger, T.; Gschossmann, S.; Schagerl, M. Manufacturing of artificial sub-surface cracks to investigate non-linear features of electro-mechanical impedance measurements. In Proceedings of the International Society for Optics and Photonics (SPIE), Denver, CO, USA, 4–8 March 2018. [Google Scholar]
- Giurgiutiu, V.; Zagrai, A.N. Damage Detection in Thin Plates and Aerospace Structures with the Electro-Mechanical Impedance Method. Struct. Health Monit. 2005, 4, 99–118. [Google Scholar] [CrossRef] [Green Version]
- Kralovec, C.; Schagerl, M.; Erlinger, T. Model-based Evaluation of Electro-mechanical Impedance Measurements for Detection and Size Identification of Face Layer Debondings in Sandwich Panels. In Proceedings of the 11th IWSHM, Stanford, CA, USA, 12–14 September 2017; pp. 472–479. [Google Scholar]
- Fendzi, C.; Mechbal, N.; Rebillat, M.; Guskov, M.; Coffignal, G. A general Bayesian framework for ellipse-based and hyperbola-based damage localization in anisotropic composite plates. J. Intell. Mater. Syst. Struct. 2016, 27, 350–374. [Google Scholar] [CrossRef] [Green Version]
- Preisler, A. Efficient Damage Detection and Assessment based on Structural Damage Indicators. Ph.D. Thesis, Institute of Structural Mechanics and Lightweight Design, RWTH Aachen University, Aachen, Germany, 2020. [Google Scholar]
- Yang, Z.B.; Chen, X.F.; Xie, Y.; Zhang, X.W. The hybrid multivariate analysis method for damage detection. Struct. Control Health Monit. 2015, 23, 123–143. [Google Scholar] [CrossRef]
- Xiang, J.-W.; Yang, Z.-B.; Aguilar, J.L. Structural health monitoring for mechanical structures using multi-sensor data. Int. J. Distrib. Sens. Netw. 2018, 14. [Google Scholar] [CrossRef] [Green Version]
- Hall, D.L.; Llinas, J. An introduction to multisensor data fusion. Proc. IEEE 1997, 85, 6–23. [Google Scholar] [CrossRef] [Green Version]
- Kralovec, C.; Schagerl, M.; Mayr, M. Localization of damages by model-based evaluation of electro-mechanical impedance measurements. In Proceedings of the 9th EWSHM, Manchester, UK, 10–13 July 2018. [Google Scholar]
- Lowe, M.J.S.; Cawley, P. Long Range Guided Wave Inspection Usage—Current Commercial Capabilities and Research Directions; Department of Mechanical Engineering, Imperial College London: London, UK, 2006. [Google Scholar]
- Gschossmann, S.; Soleimanpour, R.; Schagerl, M. Numerical study of interaction of nonlinear guided waves with breathing defects in isotropic material. In Proceedings of the 8th ECCOMAS Thematic Conference on Smart Structures and Materials, Madrid, Spain, 5–8 June 2017; pp. 1347–1357. [Google Scholar]
- Zhao, Y.; Gschossmann, S.; Schagerl, M. Observing the fracture behavior of a center crack via electrical impedance tomography using inkjet-printed carbon nanotube thin films. In Proceedings of the 11th IWSHM, Stanford, CA, USA, 12–14 September 2017. [Google Scholar]
- Ziaja, A.; Cheng, L.; Su, Z.; Packo, P.; Pieczonka, L.; Uhl, T.; Staszewski, W. Thick hollow cylindrical waveguides: A theoretical, numerical and experimental study. J. Sound Vib. 2015, 350, 73–90. [Google Scholar] [CrossRef]
- Michaels, J.E.; Lee, S.J.; Michaels, T.E. Impact of applied loads on guided wave structural health monitoring. In Proceedings of the 37th Symposium on Quantitative Nondestructive Evaluation, San Diego, CA, USA, 18–23 July 2010; Volume 1335, pp. 1515–1522. [Google Scholar]
- Abbas, S.; Li, F.; Zhu, Y.; Tu, X. Experimental investigation of impact of environmental temperature and optimal baseline for thermal attenuation in structural health monitoring based on ultrasonic guided waves. Wave Motion 2019, 93, 102474. [Google Scholar] [CrossRef]
- Barr, A.D.; Clarke, S.D.; Tyas, A.; Warren, J.A. Electromagnetic interference in measurements of radial stress during split Hopkinson pressure bar experiments. Exp. Mech. 2017, 57, 813–817. [Google Scholar] [CrossRef] [Green Version]
- Jiménez, A.A.; Muñoz, C.Q.G.; Márquez, F.P.G. Dirt and mud detection and diagnosis on a wind turbine blade employing guided waves and supervised learning classifiers. Reliab. Eng. Syst. Saf. 2019, 184, 2–12. [Google Scholar] [CrossRef] [Green Version]
- Di Sante, R. Fibre Optic Sensors for Structural Health Monitoring of Aircraft Composite Structures: Recent Advances and Applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef]
- Farreras-Alcover, I.; Chryssanthopoulos, M.; Andersen, J. Data-based models for fatigue reliability of orthotropic steel bridge decks based on temperature, traffic and strain monitoring. Int. J. Fatigue 2017, 95, 104–119. [Google Scholar] [CrossRef]
- Lu, N.; Noori, M.; Liu, Y. Fatigue reliability assessment of welded steel bridge decks under stochastic truck loads via machine learning. J. Bridge Eng. 2016, 22, 04016105. [Google Scholar] [CrossRef]
- Soman, R.N.; Schagerl, M.; Kralovec, C.; Schröder, K.-U.; Preisler, A.; Ostachowicz, W. Application of Kalman filter based neutral axis tracking for crack length quantification in beam structures. In Proceedings of the International Society for Optics and Photonics (SPIE), Denver, CO, USA, 3–7 March 2019; Volume 10972, p. 1097214. [Google Scholar]
- Schagerl, M.; Viechtbauer, C.; Schaberger, M. Optimal Placement of Fiber Optical Sensors along Zero-strain Trajectories to Detect Damages in Thin-walled Structures with Highest Sensitivity. In Proceedings of the 10th IWSHM, Stanford, CA, USA, 1–3 September 2015. [Google Scholar]
- Riedl, M. Schadensbewertung einer beulenden Platte anhand der Methode der Nulldehnungstrajektorie und Digitaler Bildkorrelation Messung. Master’s Thesis, Institute of Structural Lightweight Design, JKU Linz, Austria, 2018. [Google Scholar]
- Wagner, J. Bestimmung von Nulldehnungstrajektorien auf der Oberfläche von beulenden Platten. Bachelor’s Thesis, Institute of Structural Lightweight Design, JKU Linz, Linz, Austria, 2015. [Google Scholar]
- Schaberger, M. Damage detection in thin-walled structures with strain measurements along zero-strain trajectories. Master’s Thesis, Institute of Structural Lightweight Design, JKU Linz, Linz, Austria, 2015. [Google Scholar]
- Adler, A.; Guardo, R. Electrical Impedance Tomography: Regularized Imaging and Contrast Detection. IEEE Trans. Med. Imaging 1996, 15, 170–179. [Google Scholar] [CrossRef]
- Cheney, M.; Isaacson, D.; Newell, JC.; Simske, S.; Goble, J. NOSER: An algorithm for solving the inverse conductivity problem. Int. J. Imaging Syst. Technol. 1990, 2, 66–75. [Google Scholar] [CrossRef]
- Adler, A.; Lionheart, W.; Polydorides, N. EIDORS-Electrical Impedance Tomography and Diffuse Optical Tomography Reconstruction Software. Available online: http://eidors3d.sourceforge.net/ (accessed on 26 December 2019).
- Zhao, Y.; Gschossmann, S.; Schagerl, M.; Grüner, P.; Kralovec, C. Characterization of the spatial elastoresistivity of inkjet-printed carbon nanotube thin films. Smart Mater. Struct. 2018, 27, 105009. [Google Scholar] [CrossRef]
- Park, M.; Kim, H.; Youngblood, J.-P. Strain-dependent electrical resistance of multi-walled carbon nanotube/polymer composite films. Nanotechnology 2008, 19, 055705. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Schagerl, M.; Viechtbauer, C.; Loh, K.J. Characterizing the conductivity and enhancing the piezoresistivity of carbon nanotube-polymeric thin films. Materials 2017, 10, 724. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, Y.; Liu, S.; Chen, S.; Wei, Y.; Dong, X.; Liu, L. A highly stretchable and sensitive strain sensor based on graphene–elastomer composites with a novel doubleinterconnected network. J. Mater. Chem. C 2016, 4, 6345–6352. [Google Scholar] [CrossRef]
- Li, Z.; Dharap, P.; Nagarajaiah, S.; Barrera, E.-V.; Kim, J. Carbon nanotube film sensors. J. Adv. Mater. 2004, 16, 640–643. [Google Scholar] [CrossRef]
- Zhao, Y.; Schagerl, M.; Kralovec, C. Updating the finite element model for electrical impedance tomography using self-organizing map. In Proceedings of the International Society for Optics and Photonics (SPIE), Denver, CO, USA, 4–8 March 2018; Volume 10598, p. 1059832. [Google Scholar]
- Grüner, P.; Zhao, Y.; Schagerl, M. Characterization of the spatial elastoresistivity of inkjet-printed carbon nanotube thin films for strain-state sensing. In Proceedings of the International Society for Optics and Photonics (SPIE), Portland, OR, USA, 25–29 March 2017; Volume 10169, p. 101690. [Google Scholar]
- Hamilton, S.J.; Lassas, M.; Siltanen, S. A direct reconstruction method for anisotropic electrical impedance tomography. Inverse Probl. 2014, 30, 075007. [Google Scholar] [CrossRef]
- Kimpfbeck, D.; Gschossmann, S.; Wagner, J.; Schagerl, M. Optimizing the electrical conductivity of CNT embedded thin films printed with industrial inkjet technology for strain sensing applications. In Proceedings of the 4SMARTS-Symposium 2019, Darmstadt, Germany, 22–23 May 2019; pp. 1515–1522. [Google Scholar]
- Baltopoulos, A.; Polydorides, N.; Pambaguian, L.; Vavouliotis, A.; Kostopoulos, V. Damage identification in carbon fiber reinforced polymer plates using electrical resistance tomography mapping. J. Compos. Mater. 2013, 47, 3285–3301. [Google Scholar] [CrossRef]
- Hörrmann, S.; Schagerl, M.; Cichocki, M.; Kralovec, C. Direkte Messung des elektrischen Widerstands zur Schadensdetektion in anisotropen CFK Laminaten. In Proceedings of the 4SMARTS-Symposium 2017, Braunschweig, Germany, 21–22 June 2017; pp. 39–49. [Google Scholar]
- Webster, J.G.; Eren, H. Measurement, Instrumentation, and Sensors Handbook: Spatial, Mechanical, Thermal, and Radiation Measurement, 2nd ed.; Taylor & Francis—CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Yu, F.M.; Huang, C.N.; Chang, F.W.; Chung, H.Y. A rotative electrical impedance tomography reconstruction system. J. Phys. Conf. Ser. 2006, 48, 542. [Google Scholar] [CrossRef]
- Wagner, J. Untersuchung des Piezoresititiven Verhaltens flächiger Dehnungssensoren Mithilfe der Elektrischen Impedanz-Tomographie. Master’s Thesis, Institute of Structural Lightweight Design, JKU Linz, Linz, Austria, 2020. [Google Scholar]
- Zagrai, A.N.; Giurgiutiu, V. Electro-mechanical impedance method for crack detection in thin plates. J. Intell. Mater. Syst. Struct. 2016, 12, 709–718. [Google Scholar] [CrossRef]
- Viechtbauer, C.; Erlinger, T.; Schagerl, M. Evaluation of the E/M Impedance Method as a SHM Technique for Large Civil Aircraft Spoilers: Analytical, Numerical and Experimental Studies Performed with Simple Structures. In Proceedings of the 10th IWSHM, Stanford, CA, USA, 1–3 September 2015; pp. 723–731. [Google Scholar]
- Park, G.; Inman, D.J. Structural health monitoring using piezoelectric impedance measurements. Philos. Trans. R. Soc. A 2007, 365, 373–392. [Google Scholar] [CrossRef]
- Park, S.; Park, G.; Yun, C.B.; Farrar, C.R. Sensor self-diagnosis using a modified impedance model for active sensing-based structural health monitoring. Struct. Health Monit. 2009, 8, 71–82. [Google Scholar] [CrossRef]
- Cherrier, O.; Selva, P.; Pommier-Budinger, V.; Lachaud, F.; Morlier, J. Damage localization map using electromechanical impedance spectrums and inverse distance weighting interpolation: Experimental validation on thin composite structures. Struct. Health Monit. 2013, 12, 311–324. [Google Scholar] [CrossRef] [Green Version]
- Na, S.; Lee, H.K. Neural network approach for damaged area location prediction of a composite plate using electromechanical impedance technique. Compos. Sci. Technol. 2013, 88, 62–68. [Google Scholar] [CrossRef]
- Kralovec, C.; Schagerl, M. Experimental measurements of vibrations of artificial sub-surface cracks and evaluation of identification potential for the electro-mechanical impedance method. In Proceedings of the International Society for Optics and Photonics (SPIE), Denver, CO, USA, 3–7 March 2019; Volume 10971, p. 109711T. [Google Scholar]
- Wang, Y.; Xu, Y.; Huang, Q. Progress on ultrasonic guided waves de-icing techniques in improving aviation energy efficiency. Renew. Syst. Energ. Rev. 2017, 79, 638–645. [Google Scholar] [CrossRef]
- Abbas, M.; Shafiee, M. Structural health monitoring (SHM) and determination of surface defects in large metallic structures using ultrasonic guided waves. Sensors 2018, 18, 3958. [Google Scholar] [CrossRef] [Green Version]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media, 1st ed.; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Ryden, N.; Park, C.B.; Ulriksen, P.; Miller, R.D. Multimodal approach to seismic pavement testing. J. Geotech. Geoenviron. Eng. 2004, 130, 636–645. [Google Scholar] [CrossRef]
- Cawley, P.; Alleyne, D. The use of Lamb waves for the long range inspection of large structures. Ultrasonics 1996, 34, 287–290. [Google Scholar] [CrossRef]
- Gao, D.; Wu, Z.; Yang, L.; Zheng, Y. Integrated impedance and Lamb wave–based structural health monitoring strategy for long-term cycle-loaded composite structure. Struct. Health Monit. 2018, 17, 763–776. [Google Scholar] [CrossRef]
- Humer, C.; Kralovec, C.; Schagerl, M. Testing the scattering analysis method for guided waves by means of artificial disturbances. In Proceedings of the 7th APWSHM, Hong Kong, China, 12–15 November 2018. [Google Scholar]
- Shen, Y.; Giurgiutiu, V. Combined analytical FEM approach for efficient simulation of Lamb wave damage detection. Ultrasonics 2016, 69, 116–128. [Google Scholar] [CrossRef] [Green Version]
- Mei, H.; Giurgiutiu, V. Wave damage interaction in metals and composites. In Proceedings of the International Society for Optics and Photonics (SPIE), Denver, CO, USA, 4–8 March 2018; Volume 10972, p. 109720O. [Google Scholar]
- Humer, C.; Kralovec, C.; Schagerl, M. Application of the scattering analysis method for guided waves measured by laser scanning vibrometry. In Proceedings of the 12th IWSHM, Standford, CA, USA, 10–12 September 2019. [Google Scholar]
- Gschossmann, S.; Oberascher, T.; Schagerl, M. Quantification of subsurface cracks in a thin aluminium beam by the use of nonlinear guided wave theory – a numerical and model-based approach. In Proceedings of the 9th EWSHM, Manchester, UK, 10–13 July 2018. [Google Scholar]
- Shen, Y.; Wang, J.; Xu, W. Nonlinear features of guided wave scattering from rivet hole nucleated fatigue cracks considering the rough contact surface condition. Smart Mater. Struct. 2018, 27, 105044. [Google Scholar] [CrossRef]
- Soleimanpour, R.; Ng, C.T.; Wang, C.H. Higher harmonic generation of guided waves at delaminations in laminated composite beams. Struct. Health Monit. 2017, 16, 400–417. [Google Scholar] [CrossRef]
- Moriot, J.; Quaegebeur, N.; Le Duff, A.; Masson, P. A model-based approach for statistical assessment of detection and localization performance of guided wave–based imaging techniques. Struct. Health Monit. 2018, 17, 1460–1472. [Google Scholar] [CrossRef] [Green Version]
- Adam, C.; Fisher, J.; Michaels, J.E. Model-Assisted Probability of Detection for Ultrasonic Structural Health Monitoring. In Proceedings of the 4th European-American Workshop on Reliability of NDE, Berlin, Germany, 24–26 June 2009. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Damage Type | Material Stiffness E | Mass m | Damping c | Material Conductivity | Boundary Formation a |
|---|---|---|---|---|---|---|
| metal | notch | ∘ | − | − | + | + |
| crack | + | − | − | + | + | |
| corrosion | ∘ | ∘ | ∘ | ∘ | ∘ | |
| composite | notch | ∘ | − | − | + | + |
| matrix crack | ∘ | − | ∘ | ∘ | − | |
| fiber crack | + | − | ∘ | + | − | |
| delamination | ∘ | − | ∘ | ∘ | + |
| Material | Influence Type | Material Stiffness E | Mass m | Damping c | Material Conductivity | Boundary Formation a |
|---|---|---|---|---|---|---|
| metal | temperature | ∘ | − | − | ∘ | − |
| dirt | − | + | + | − | ∘ | |
| electromagnetic radiation | − | − | − | ∘ | − | |
| mechanical loads | − | − | − | ∘ | ∘ | |
| composite | temperature | + | − | ∘ | ∘ | − |
| dirt | − | + | + | − | ∘ | |
| moisture | + | + | ∘ | ∘ | − | |
| electromagnetic radiation | − | − | − | ∘ | − | |
| mechanical loads | − | − | − | ∘ | − |
| Approach | SHM Method | Sensor | Measurement Entity | Influencing Properties | SHM Level |
|---|---|---|---|---|---|
| static | strain sensing | strain gauge | local strain | 2 | |
| FOS | strain along line | 3 | |||
| EIT | conductive coating | thin film conductivity | 3 | ||
| conductive structure | volume conductivity | 3 | |||
| dynamic | EMI | piezoelectric element | global EMI | 3 | |
| guided waves | wave propagation | 4 | |||
| acoustic emission | 2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kralovec, C.; Schagerl, M. Review of Structural Health Monitoring Methods Regarding a Multi-Sensor Approach for Damage Assessment of Metal and Composite Structures. Sensors 2020, 20, 826. https://doi.org/10.3390/s20030826
Kralovec C, Schagerl M. Review of Structural Health Monitoring Methods Regarding a Multi-Sensor Approach for Damage Assessment of Metal and Composite Structures. Sensors. 2020; 20(3):826. https://doi.org/10.3390/s20030826
Chicago/Turabian StyleKralovec, Christoph, and Martin Schagerl. 2020. "Review of Structural Health Monitoring Methods Regarding a Multi-Sensor Approach for Damage Assessment of Metal and Composite Structures" Sensors 20, no. 3: 826. https://doi.org/10.3390/s20030826
APA StyleKralovec, C., & Schagerl, M. (2020). Review of Structural Health Monitoring Methods Regarding a Multi-Sensor Approach for Damage Assessment of Metal and Composite Structures. Sensors, 20(3), 826. https://doi.org/10.3390/s20030826