Model-Aided Localization and Navigation for Underwater Gliders Using Single-Beacon Travel-Time Differences

 , , ,
, , ,
Abstract
:1. Introduction
2. Problem Statement
3. Modified Kinematic Model for the Sea-Wing Underwater Glider
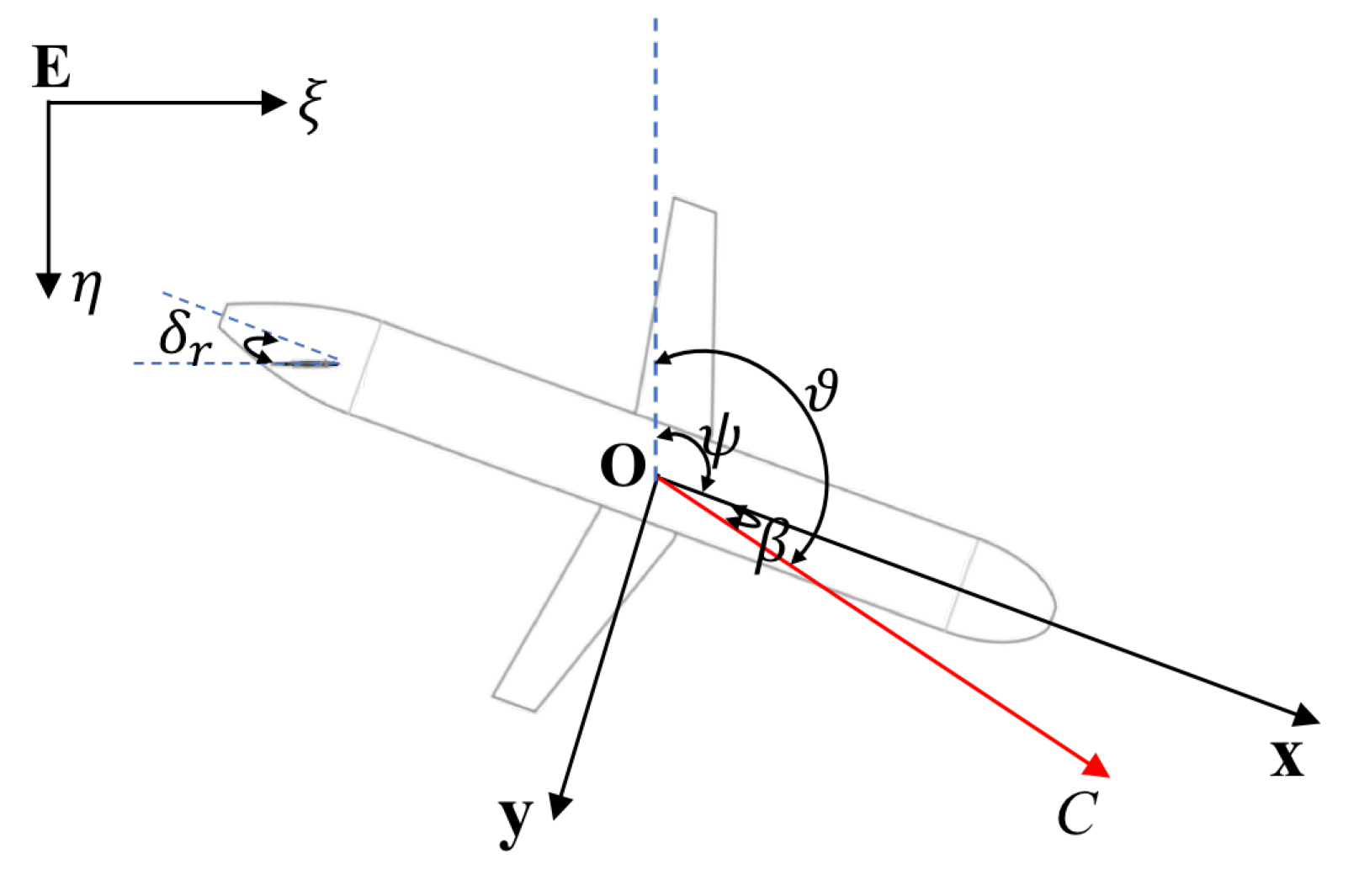
3.1. Kinematic Model
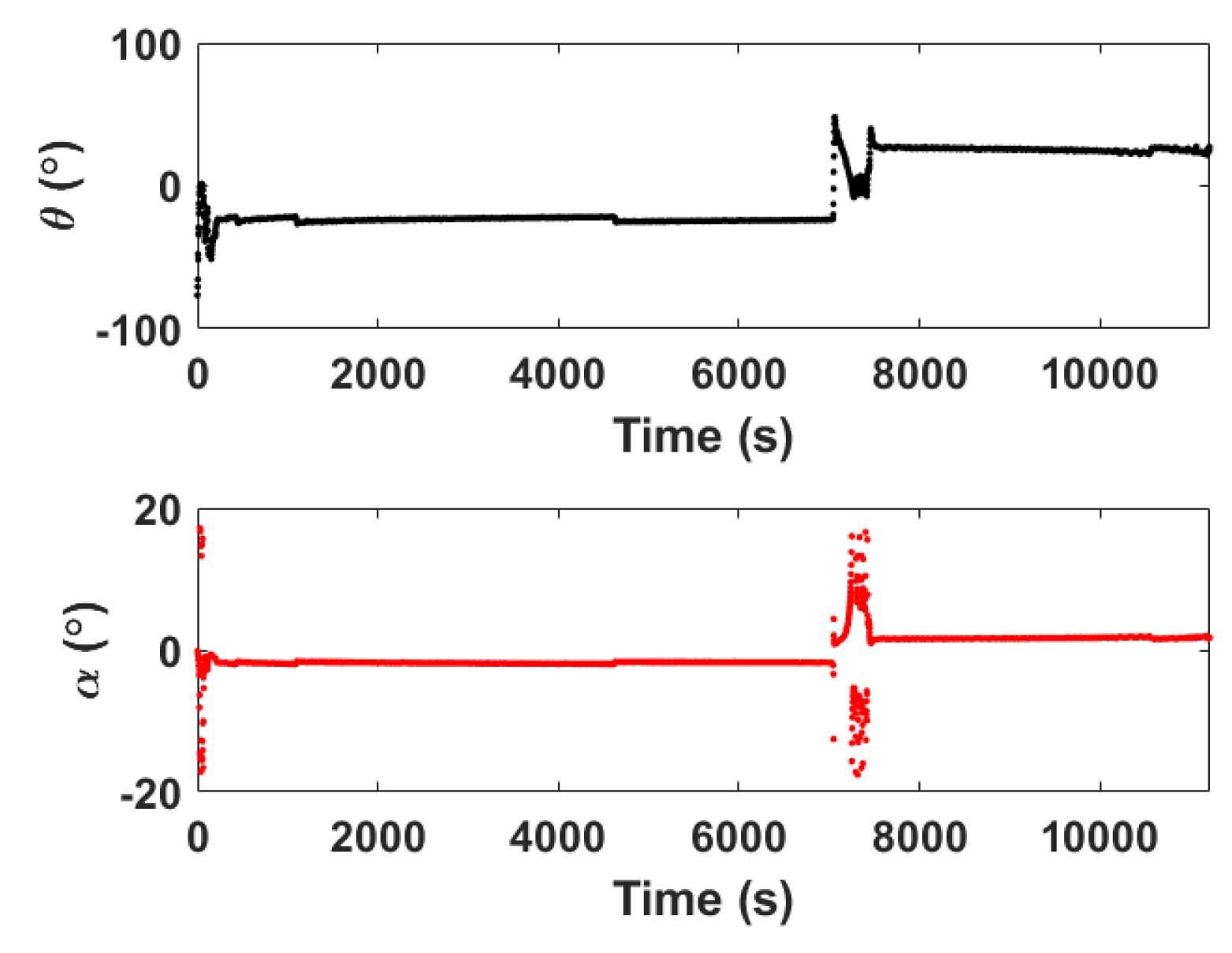
3.2. Solution of Attack Angle
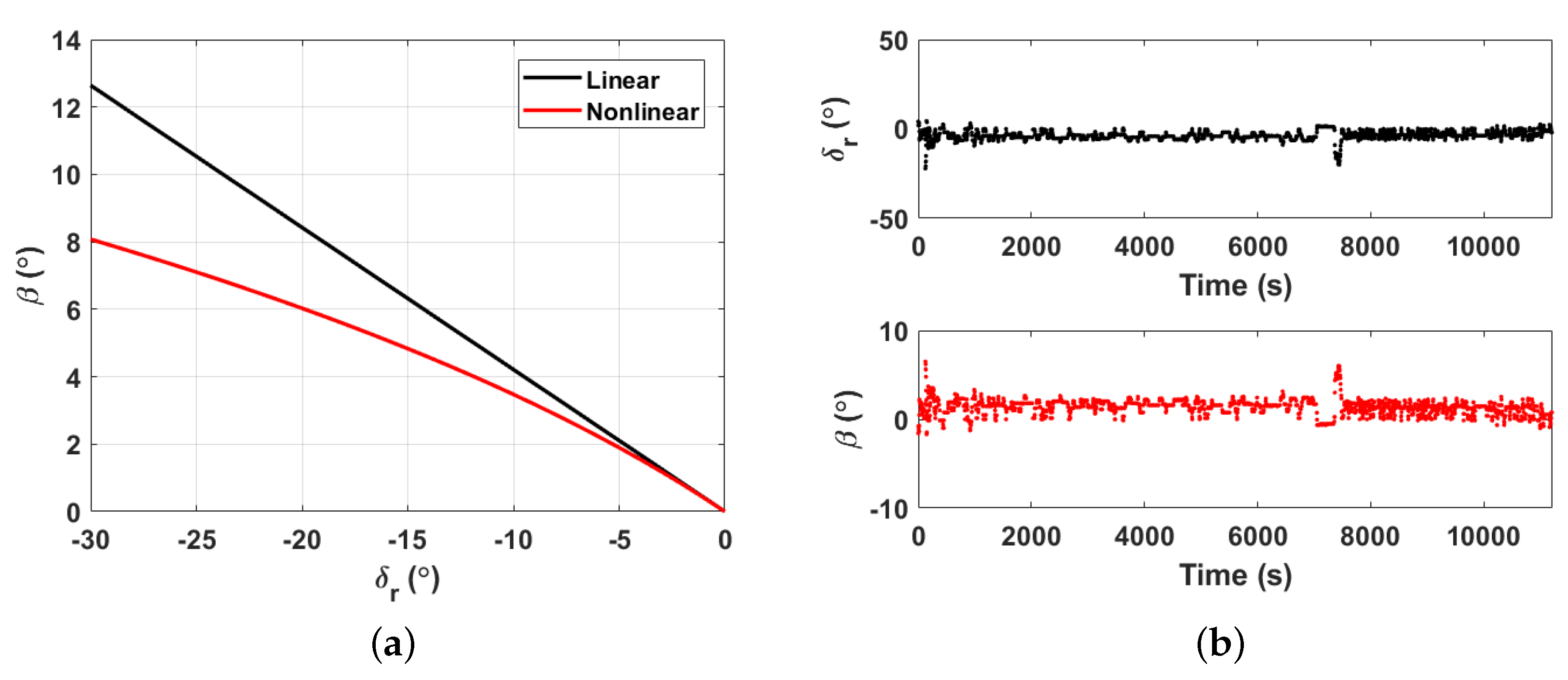
3.3. Solution of Drift Angle
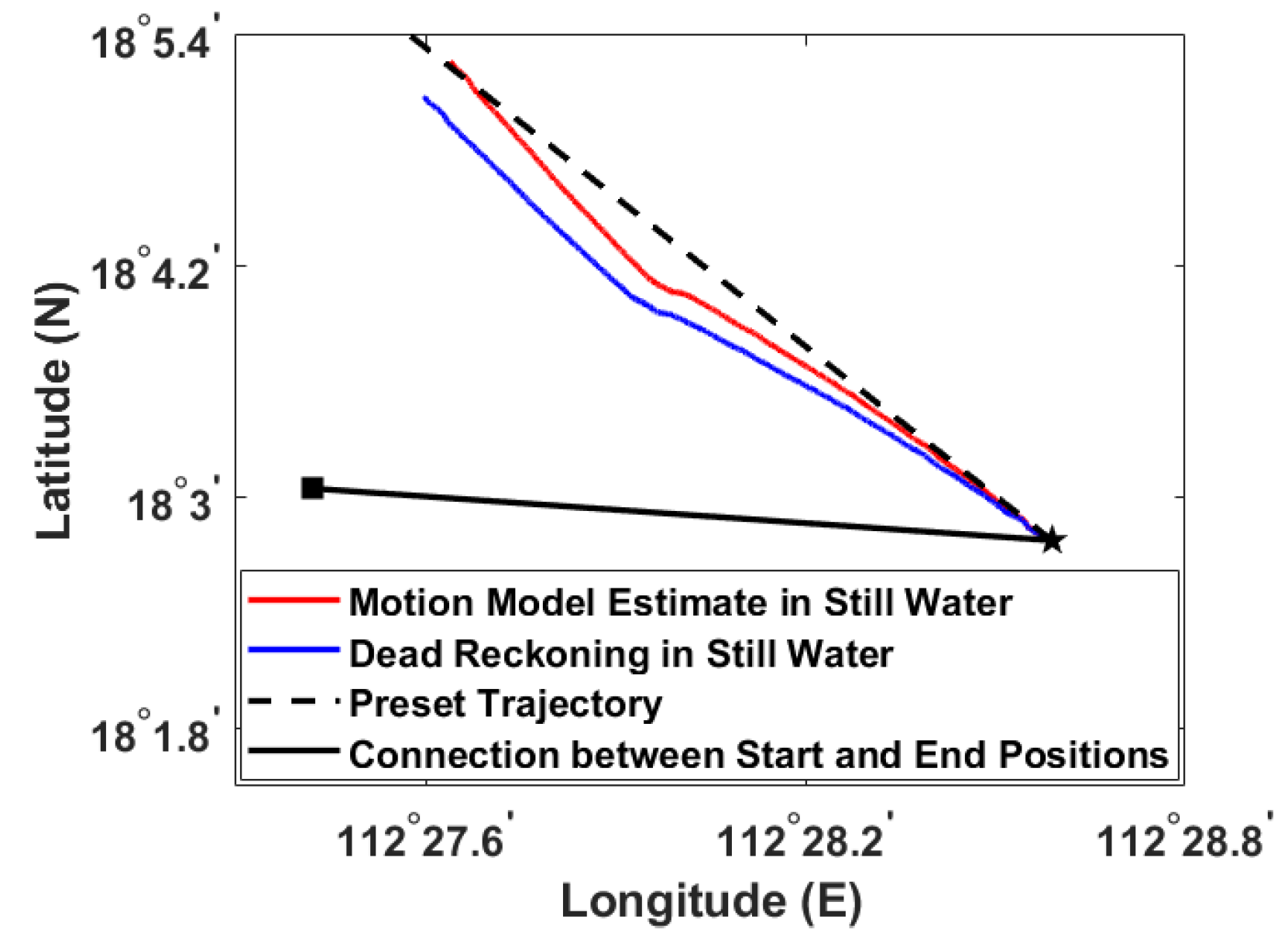
3.4. Comparison with Dead Reckoning
4. EKF-Based Localization and Navigation System Modeling
4.1. System State Prediction
4.2. Measurement Model
4.3. Recursive Estimation of the System State
4.4. Estimation Improvement by RTS Smoothing
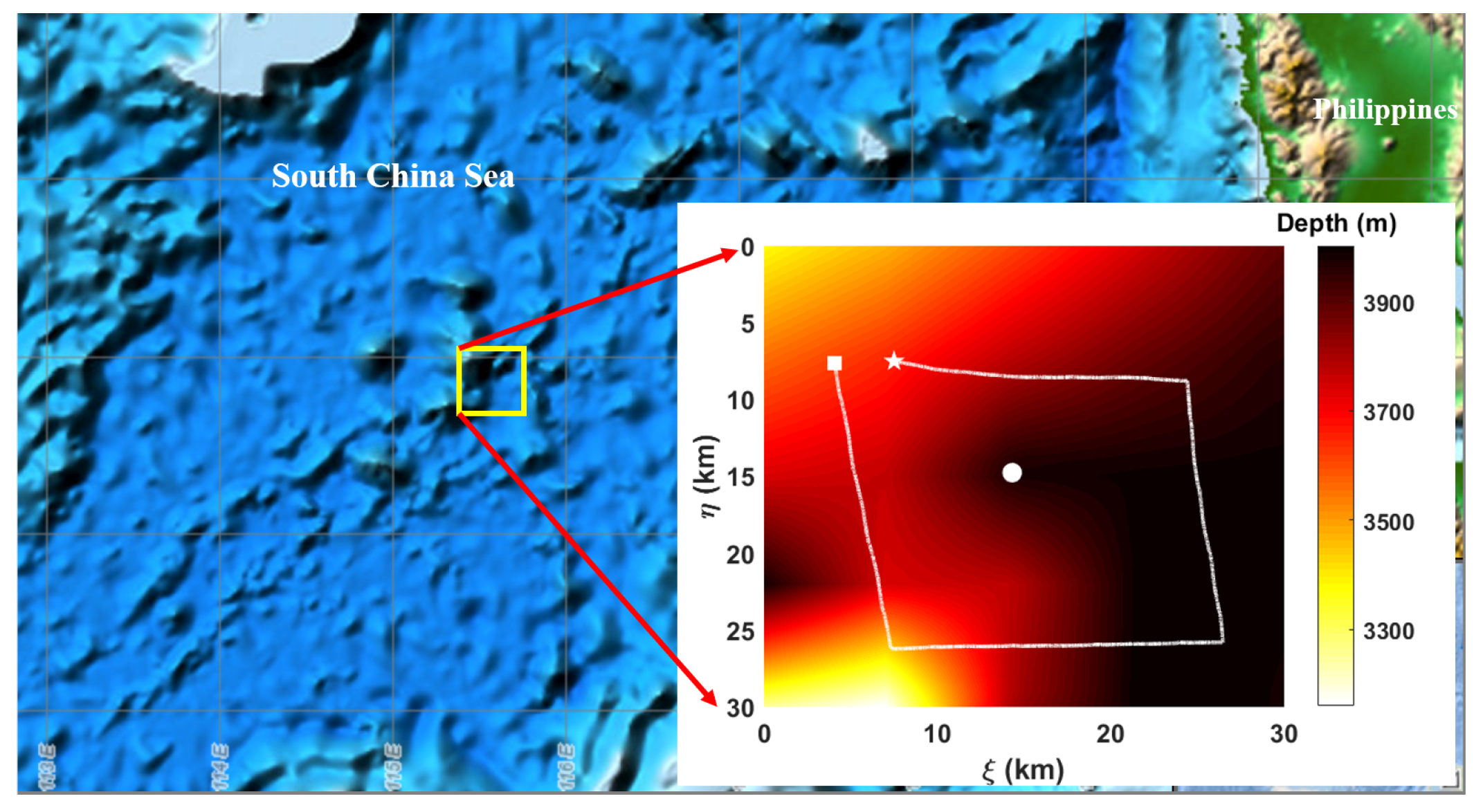
5. Simulation Based on Experimental and Model Data
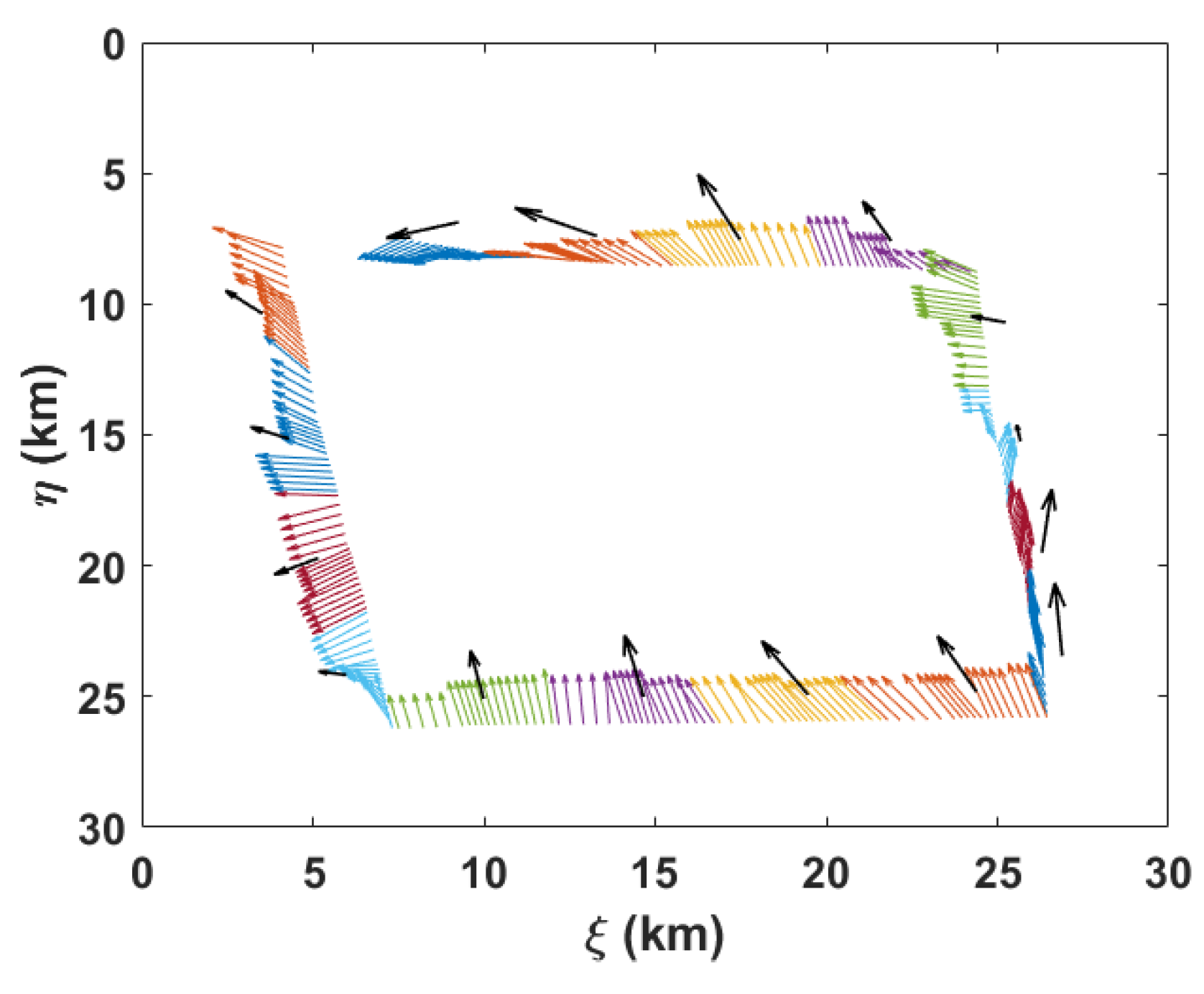
5.1. Simulated Ocean Currents
5.2. Acoustic Travel-Time Simulation
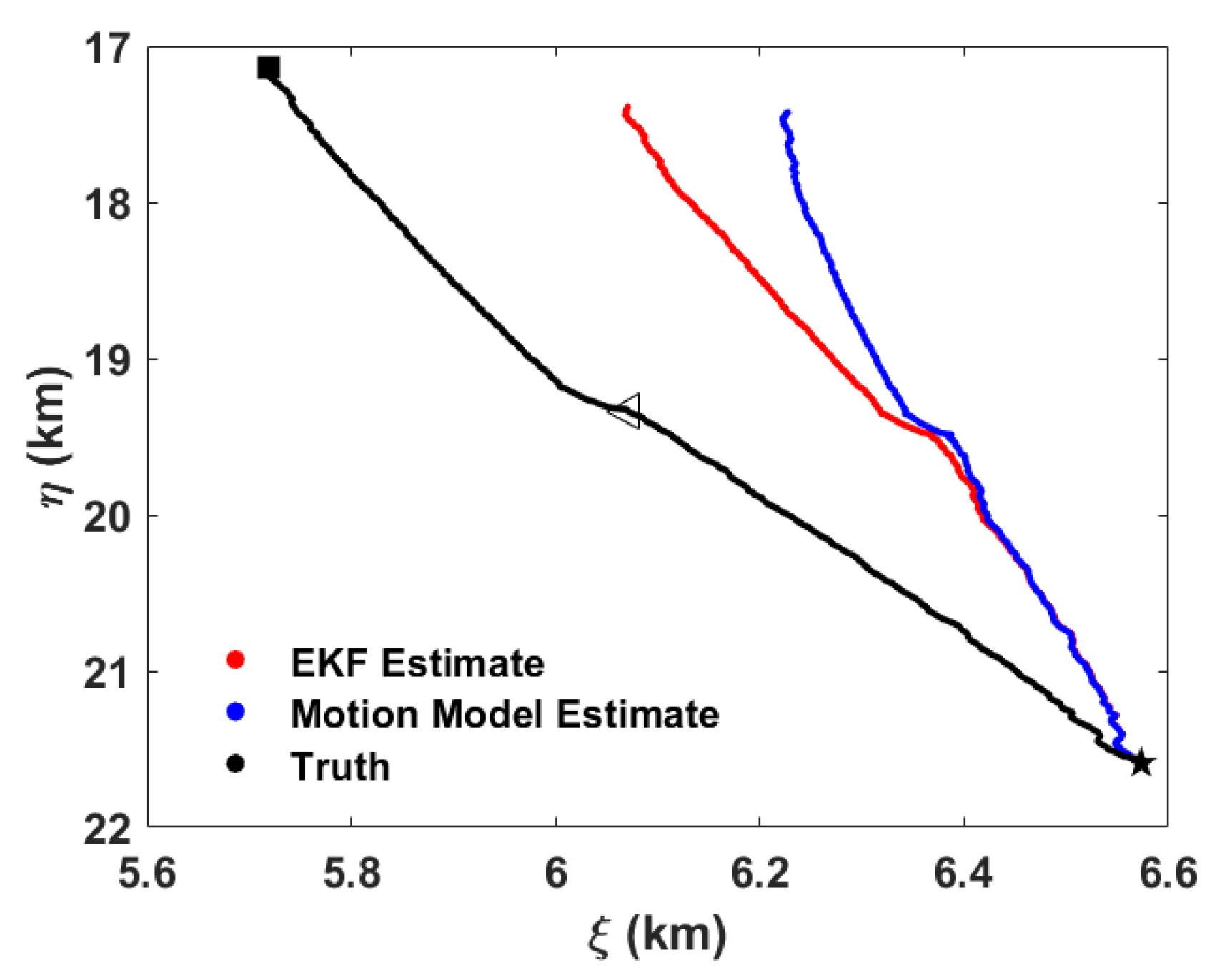
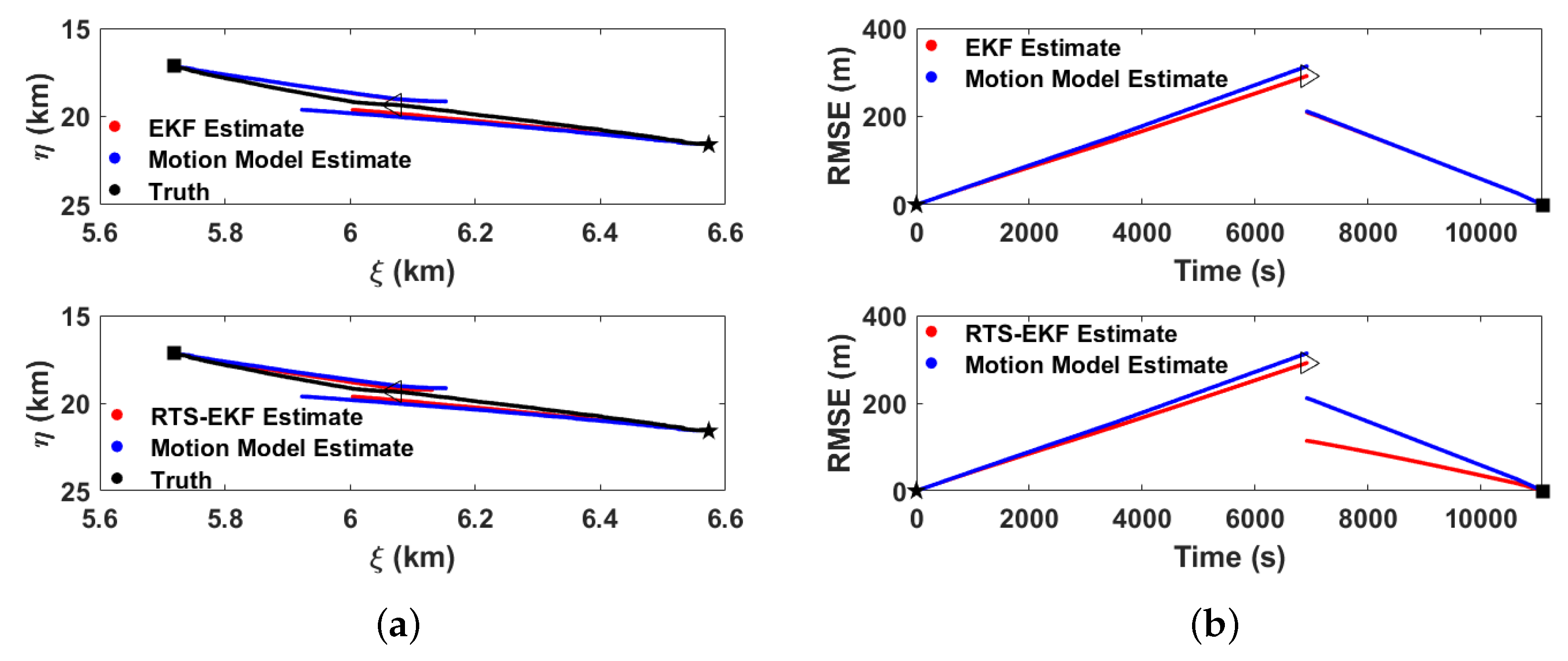
5.3. EKF Estimation
5.4. RTS-EKF Estimation
5.5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Stommel, H. The Slocum Mission. Oceanography 1989, 2, 22–25. [Google Scholar] [CrossRef]
- Martin, D. Autonomous Platforms in Persistent Littoral Undersea Surveillance: Scientific and Systems Engineering Challenges; Applied Physics Laboratory University of Washington: Seattle, WA, USA, 6 October 2005; Available online: https://my.nps.edu/documents/103424733/107333295/Autonomous+Platfors+in+Persistent+Littorl.pdf (accessed on 15 November 2019).
- Grund, M.; Freitag, L.; Preisig, J.; Ball, K. The PLUSNet underwater communications system: Acoustic telemetry for undersea surveillance. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–5. [Google Scholar]
- Petritoli, E.; Leccese, F.; Leccisi, M. Inertial navigation systems for UAV: Uncertainty and error measurements. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Torino, Italy, 19–21 June 2019; pp. 1–5. [Google Scholar]
- Zhao, L.; Gao, W. The experimental study on GPS/INS/DVL integration for AUV. In Proceedings of the Position Location and Navigation Symposium (PLANS 2004), Monterey, CA, USA, 26–29 April 2004; pp. 337–340. [Google Scholar]
- Scott, R.D. Cooperative Tracking for Persistent Littoral Undersea Surveillance; Technical Report; MIT Department of Electrical Engineering and Computer Science: Cambridge, MA, USA, 2007; Available online: https://https://apps.dtic.mil/docs/citations/ADA494153 (accessed on 15 November 2019).
- Sun, J.; Yu, J.; Zhang, A.; Song, A.; Zhang, F. Underwater acoustic intensity field reconstruction by kriged compressive sensing. In Proceedings of the Thirteenth ACM International Conference on Underwater Networks & Systems, Shenzhen, China, 3–5 December 2018; pp. 1–8. [Google Scholar]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2013, 39, 131–149. [Google Scholar] [CrossRef]
- Leonard, J.J.; Bahr, A. Autonomous underwater vehicle navigation. In Springer Handbook of Ocean Engineering; Springer: Cham, Switzerland, 2016; pp. 341–358. [Google Scholar]
- Bahr, A.; Leonard, J.J.; Fallon, M.F. Cooperative localization for autonomous underwater vehicles. Int. J. Robot. Res. 2009, 28, 714–728. [Google Scholar] [CrossRef]
- Wang, H.; Wang, D.; Peng, Z. Neural network based adaptive dynamic surface control for cooperative path following of marine surface vehicles via state and output feedback. Neurocomputing 2014, 133, 170–178. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F. High accuracy attitude and navigation system for an autonomous underwater vehicle (AUV). Acta IMEKO 2018, 7, 3–9. [Google Scholar] [CrossRef]
- Stutters, L.; Liu, H.; Tiltman, C.; Brown, D.J. Navigation technologies for autonomous underwater vehicles. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2008, 38, 581–589. [Google Scholar] [CrossRef]
- Garau, B.; Alvarez, A.; Oliver, G. AUV navigation through turbulent ocean environments supported by onboard H-ADCP. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 3556–3561. [Google Scholar]
- Zhang, S.; Yu, J.; Zhang, A.; Zhang, F. Spiraling motion of underwater gliders: Modeling, analysis, and experimental results. Ocean Eng. 2013, 60, 1–13. [Google Scholar] [CrossRef]
- Wang, S.X.; Sun, X.J.; Wang, Y.H.; Wu, J.G.; Wang, X.M. Dynamic modeling and motion simulation for a winged hybrid-driven underwater glider. China Ocean Eng. 2011, 25, 97–112. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Cagnetti, M. High Accuracy Buoyancy for Underwater Gliders: The Uncertainty in the Depth Control. Sensors 2019, 19, 1831. [Google Scholar] [CrossRef] [Green Version]
- Graver, J.G. Underwater Gliders: Dynamics, Control and Design. Ph.D. Thesis, Princeton University, Princeton, NJ, USA, 2005. [Google Scholar]
- Lanchester, F. Aerodonetics; Constable: London, UK, 1908. [Google Scholar]
- Sherman, J.; Davis, R.E.; Owens, W.; Valdes, J. The autonomous underwater glider “Spray”. IEEE J. Ocean Eng. 2001, 26, 437–446. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Singh, P.K.; Yi, J. Dynamic model-aided localization of underwater autonomous gliders. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5565–5570. [Google Scholar]
- Eriksen, C.C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Seaglider: A long-range autonomous underwater vehicle for oceanographic research. IEEE J. Ocean Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Yu, J.; Zhao, W.; Jin, W.; Luo, Y.; Li, Y. A practical path tracking method for autonomous underwater gilders using iterative algorithm. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Zhou, Y.; Yu, J.; Wang, X. Time series prediction methods for depth-averaged current velocities of underwater gliders. IEEE Access 2017, 5, 5773–5784. [Google Scholar] [CrossRef]
- Johannsson, H.; Kaess, M.; Englot, B.; Hover, F.; Leonard, J. Imaging sonar-aided navigation for autonomous underwater harbor surveillance. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, China, 18–22 October 2010; pp. 4396–4403. [Google Scholar]
- Barkby, S.; Williams, S.B.; Pizarro, O.; Jakuba, M.V. A featureless approach to efficient bathymetric SLAM using distributed particle mapping. J. Field Robot. 2011, 28, 19–39. [Google Scholar] [CrossRef]
- Zhang, T.; Tang, J.; Li, Z.; Zhou, Y.; Wang, X. Use of the Jiaolong manned submersible for accurate mapping of deep-sea topography and geomorphology. Sci. China Earth Sci. 2018, 61, 1148–1156. [Google Scholar] [CrossRef]
- Eustice, R.M.; Pizarro, O.; Singh, H. Visually augmented navigation for autonomous underwater vehicles. IEEE J. Ocean Eng. 2008, 33, 103–122. [Google Scholar] [CrossRef] [Green Version]
- Armstrong, B.; Wolbrecht, E.; Edwards, D. AUV navigation in the presence of a magnetic disturbance with an extended Kalman filter. In Proceedings of the Oceans’10 IEEE Sydney, Sydney, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar]
- Allotta, B.; Costanzi, R.; Meli, E.; Pugi, L.; Ridolfi, A.; Vettori, G. Cooperative localization of a team of AUVs by a tetrahedral configuration. Robot. Auton. Syst. 2014, 62, 1228–1237. [Google Scholar] [CrossRef]
- Rypkema, N.R.; Fischell, E.M.; Schmidt, H. One-way travel-time inverted ultra-short baseline localization for low-cost autonomous underwater vehicles. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 4920–4926. [Google Scholar]
- Batista, P.; Silvestre, C.; Oliveira, P. A sensor-based controller for homing of underactuated AUVs. IEEE Trans. Robot. 2009, 25, 701–716. [Google Scholar] [CrossRef]
- Wang, G.; Li, Y.; Ansari, N. A semidefinite relaxation method for source localization using TDOA and FDOA measurements. IEEE Trans. Veh. Technol. 2012, 62, 853–862. [Google Scholar] [CrossRef]
- Rigby, P.; Pizarro, O.; Williams, S.B. Towards geo-referenced AUV navigation through fusion of USBL and DVL measurements. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Zhang, T.; Liu, B.; Liu, Y. Positioning systems for Jiaolong deep-sea manned submersible: sea trial and application. IEEE Access 2018, 6, 71644–71650. [Google Scholar] [CrossRef]
- Eustice, R.M.; Whitcomb, L.L.; Singh, H.; Grund, M. Experimental results in synchronous-clock one-way-travel-time acoustic navigation for autonomous underwater vehicles. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4257–4264. [Google Scholar]
- Webster, S.E.; Eustice, R.M.; Singh, H.; Whitcomb, L.L. Advances in single-beacon one-way-travel-time acoustic navigation for underwater vehicles. Int. J. Robot. Res. 2012, 31, 935–950. [Google Scholar] [CrossRef]
- Vaganay, J.; Leonard, J.J.; Curcio, J.A.; Willcox, J.S. Experimental validation of the moving long base-line navigation concept. In Proceedings of the 2004 IEEE/OES Autonomous Underwater Vehicles (IEEE Cat. No. 04CH37578), Sebasco, ME, USA, 17–18 June 2004; pp. 59–65. [Google Scholar]
- Gardner, W.A.; Chen, C.K. Signal-selective time-difference-of-arrival estimation for passive location of man-made signal sources in highly corruptive environments. Part 1. Theory and method. IEEE Trans. Signal Process. 1992, 40, 1168–1184. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F. Positioning using time-difference of arrival measurements. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, Hong Kong, China, 6–10 April 2003; Volume 6, p. VI-553. [Google Scholar]
- Van Uffelen, L.J.; Nosal, E.M.; Howe, B.M.; Carter, G.S.; Worcester, P.F.; Dzieciuch, M.A.; Heaney, K.D.; Campbell, R.L.; Cross, P.S. Estimating uncertainty in subsurface glider position using transmissions from fixed acoustic tomography sources. J. Acoust. Soc. Am. 2013, 134, 3260–3271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bender, A.; Steinberg, D.M.; Friedman, A.L.; Williams, S.B. Analysis of an autonomous underwater glider. In Proceedings of the 2008 Australasian Conference on Robotics and Automation, Canberra, Australia, 3–5 December 2008; pp. 1–10. [Google Scholar]
- Sun, J.; Yu, J.; Zhang, A.; Zhang, F. Navigation positioning algorithm for underwater gliders in three-dimensional space. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems, Shenyang, China, 8–12 June 2015; pp. 1269–1274. [Google Scholar]
- Allotta, B.; Caiti, A.; Costanzi, R.; Fanelli, F.; Fenucci, D.; Meli, E.; Ridolfi, A. A new AUV navigation system exploiting unscented Kalman filter. Ocean Eng. 2016, 113, 121–132. [Google Scholar] [CrossRef]
- Webster, S.E.; Walls, J.M.; Whitcomb, L.L.; Eustice, R.M. Decentralized extended information filter for single-beacon cooperative acoustic navigation: Theory and experiments. IEEE Trans. Robot. 2013, 29, 957–974. [Google Scholar] [CrossRef]
- Fallon, M.F.; Papadopoulos, G.; Leonard, J.J.; Patrikalakis, N.M. Cooperative AUV navigation using a single maneuvering surface craft. Int. J. Robot. Res. 2010, 29, 1461–1474. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Liu, S.; Yu, J.; Zhang, A.; Zhang, F. Localization of underwater gliders with acoustic travel-time in an observation network. In Proceedings of the OCEANS 2016-Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar]
- Crassidis, J.L.; Junkins, J.L. Optimal Estimation of Dynamic Systems; Chapman and Hall/CRC: Boca Raton, FL, USA, 2011. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Ravela, S.; McLaughlin, D. Fast ensemble smoothing. Ocean Dyn. 2007, 57, 123–134. [Google Scholar] [CrossRef] [Green Version]
- Maybeck, P.S. Stochastic Models, Estimation, and Control; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Doucet, A.; Johansen, A.M. A tutorial on particle filtering and smoothing: Fifteen years later. In The Oxford Handbook of Nonlinear Filtering; Oxford University Press: New York, NY, USA, 2011; Volume 24, pp. 656–704. [Google Scholar]
- Särkkä, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Fraser, D.; Potter, J. The optimum linear smoother as a combination of two optimum linear filters. IEEE Trans. Autom. Control 1969, 14, 387–390. [Google Scholar] [CrossRef]
- Briers, M.; Doucet, A.; Maskell, S. Smoothing algorithms for state–space models. Ann. Inst. Stat. Math. 2010, 62, 61. [Google Scholar] [CrossRef]
- Rauch, H.E.; Tung, F.; Striebel, C.T. Maximum likelihood estimates of linear dynamic systems. AIAA J. 1965, 3, 1445–1450. [Google Scholar] [CrossRef]
- Xiaolin, G.; Jiancheng, F. Application of SVD-based RTS Optimal Smoothing Algorithm to POS for Airborne SAR Motion Compensation. Acta Aeronaut. Astronaut. Sin. 2009, 30, 311–318. [Google Scholar]
- Särkkä, S. Unscented Rauch–Tung–Striebel Smoother. IEEE Trans. Autom. Control 2008, 53, 845–849. [Google Scholar] [CrossRef] [Green Version]
- Särkkä, S.; Hartikainen, J. On Gaussian optimal smoothing of non-linear state space models. IEEE Trans. Autom. Control 2010, 55, 1938–1941. [Google Scholar] [CrossRef]
- Yu, J.c.; Zhang, A.Q.; Jin, W.M.; Chen, Q.; Tian, Y.; Liu, C.J. Development and experiments of the sea-wing underwater glider. China Ocean Eng. 2011, 25, 721–736. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Zhang, F.; Zhang, A.; Jin, W.; Tian, Y. Motion parameter optimization and sensor scheduling for the sea-wing underwater glider. IEEE J. Ocean. Eng. 2013, 38, 243–254. [Google Scholar] [CrossRef]
- Leonard, N.E.; Graver, J.G. Model-based feedback control of autonomous underwater gliders. IEEE J. Ocean. Eng. 2001, 26, 633–645. [Google Scholar] [CrossRef] [Green Version]
- Shi, S. Maneuverability of Submarine; National Defense Industry Press: Beijing, China, 1995. [Google Scholar]
- Gao, T.; Wang, Y.; Pang, Y.; Chen, Q.; Tang, Y. A time-efficient CFD approach for hydrodynamic coefficient determination and model simplification of submarine. Ocean Eng. 2018, 154, 16–26. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic. Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Bierman, G.J. Fixed interval smoothing with discrete measurements. Int. J. Control 1973, 18, 65–75. [Google Scholar] [CrossRef]
- POM South China Sea 1/15° Analysis. Available online: http://210.77.90.43 (accessed on 1 August 2019).
- Geospatial Data and Services. Available online: https://ngdc.noaa.gov/mgg/global/etopo2.html (accessed on 1 August 2019).
- Acoustics Toolbox. Available online: https://oalib-acoustics.org/Modes/AcousticsToolbox/index.html (accessed on 28 September 2018).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Size (m) | Hull diameter , vehicle length 2, wing span |
| Weight (kg) | 65 |
| Inflection Depth (m) | 1000 |
| Cruising Speed (m/s) | , maximum |
| Range (km) | >1100 |
| Communications | Iridium and radio communication |
| Navigation | Global positioning system, altimeter and electronic compass |
| Science Sensor | CTD and hydrophone |
| Coefficients | ||||||
| Values | 0.00611 | 0.01065 | −0.03931 | −0.03545 | 0.01558 | −0.00968 |
| Coefficients | ||||||
| Values | −0.00303 | −0.00523 | 0.01312 | −0.00149 | −0.01983 | 0.00368 |
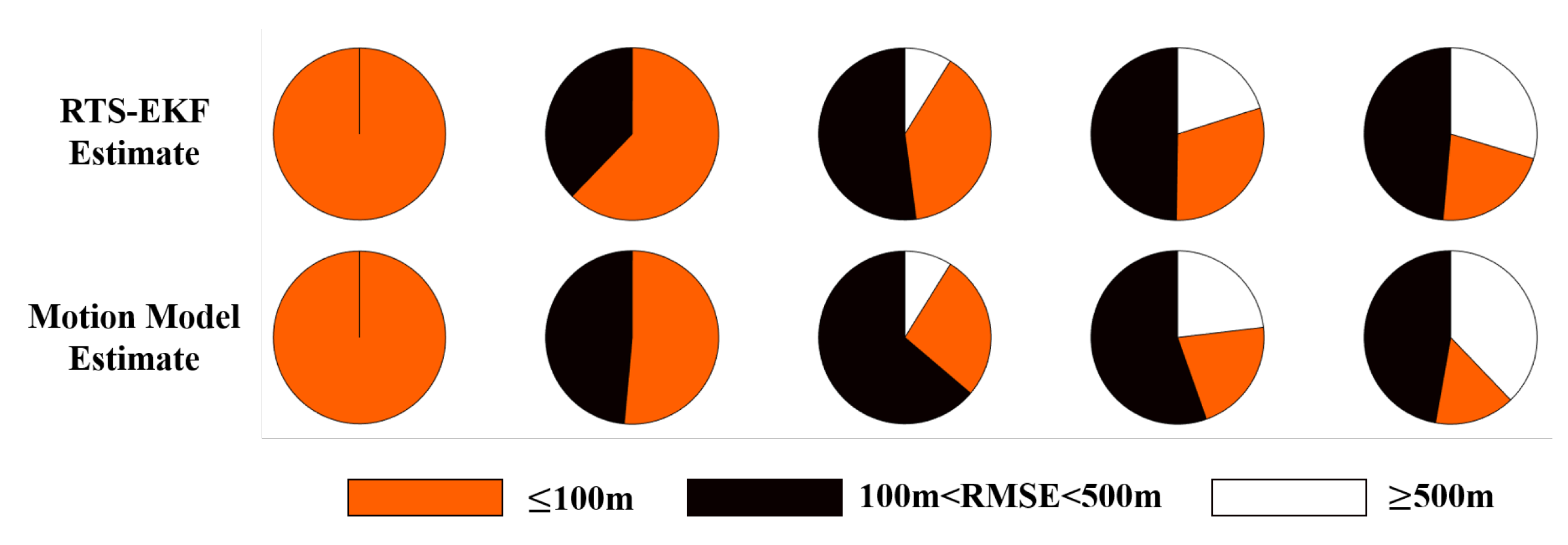
m/s | RTS-EKF Estimate | Motion Model Estimate | ||||
|---|---|---|---|---|---|---|
| ≤100 m | 100 m500 m | ≥500 m | ≤100 m | 100 m500 m | ≥500 m | |
| 0 | 100% | 0 | 0 | 100% | 0 | 0 |
| 0.05 | 62% | 38% | <1% | 51% | 49% | <1% |
| 0.1 | 39% | 52% | 9% | 27% | 64% | 9% |
| 0.15 | 30% | 50% | 20% | 21% | 55% | 24% |
| 0.2 | 22% | 49% | 30% | 15% | 47% | 38% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Hu, F.; Jin, W.; Wang, J.; Wang, X.; Luo, Y.; Yu, J.; Zhang, A. Model-Aided Localization and Navigation for Underwater Gliders Using Single-Beacon Travel-Time Differences. Sensors 2020, 20, 893. https://doi.org/10.3390/s20030893
Sun J, Hu F, Jin W, Wang J, Wang X, Luo Y, Yu J, Zhang A. Model-Aided Localization and Navigation for Underwater Gliders Using Single-Beacon Travel-Time Differences. Sensors. 2020; 20(3):893. https://doi.org/10.3390/s20030893
Chicago/Turabian StyleSun, Jie, Feng Hu, Wenming Jin, Jin Wang, Xu Wang, Yeteng Luo, Jiancheng Yu, and Aiqun Zhang. 2020. "Model-Aided Localization and Navigation for Underwater Gliders Using Single-Beacon Travel-Time Differences" Sensors 20, no. 3: 893. https://doi.org/10.3390/s20030893
APA StyleSun, J., Hu, F., Jin, W., Wang, J., Wang, X., Luo, Y., Yu, J., & Zhang, A. (2020). Model-Aided Localization and Navigation for Underwater Gliders Using Single-Beacon Travel-Time Differences. Sensors, 20(3), 893. https://doi.org/10.3390/s20030893