State-Degradation-Oriented Fault Diagnosis for High-Speed Train Running Gears System



Abstract
:
1. Introduction
- (1)
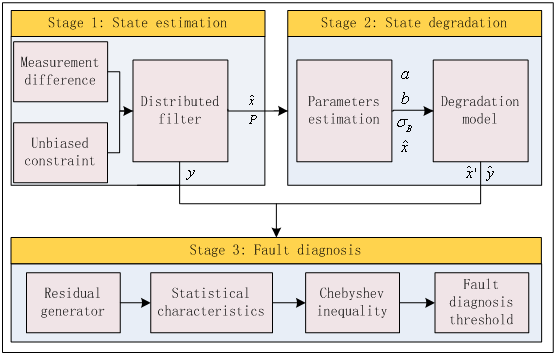
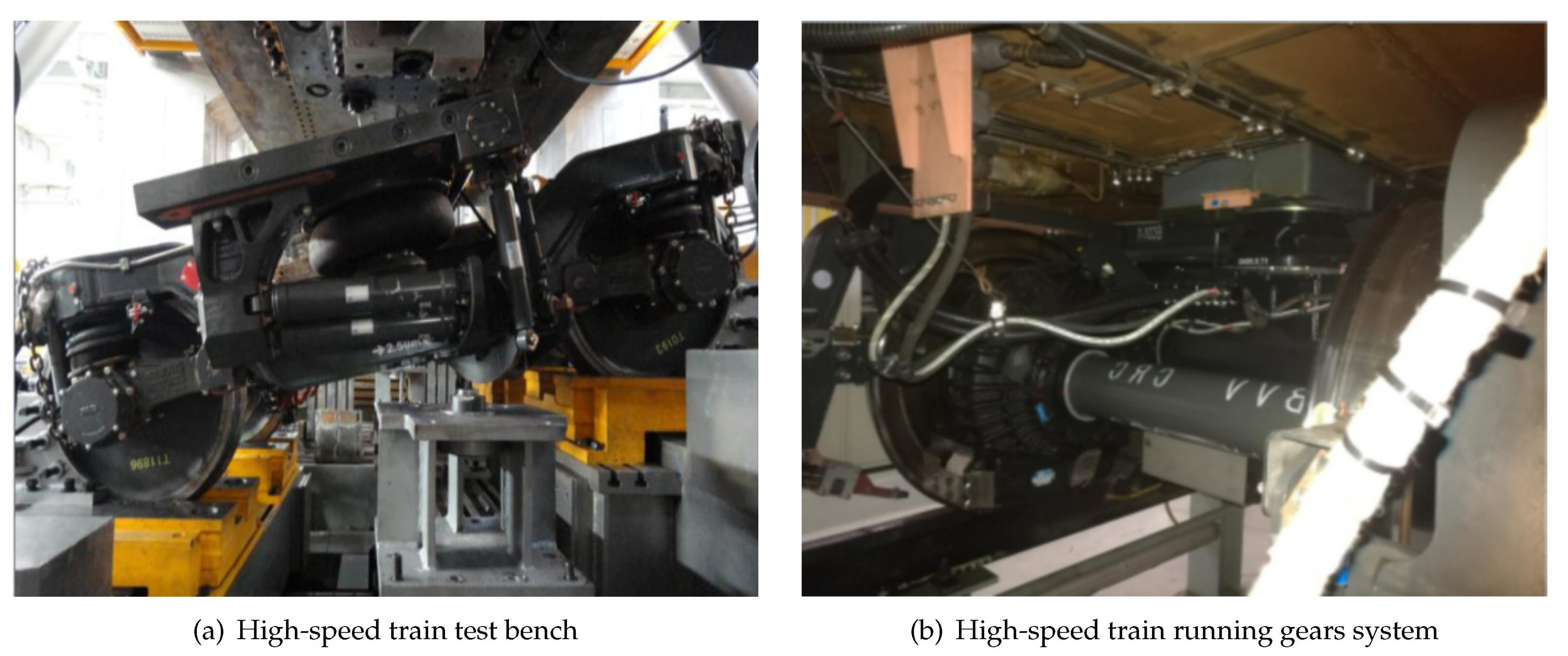
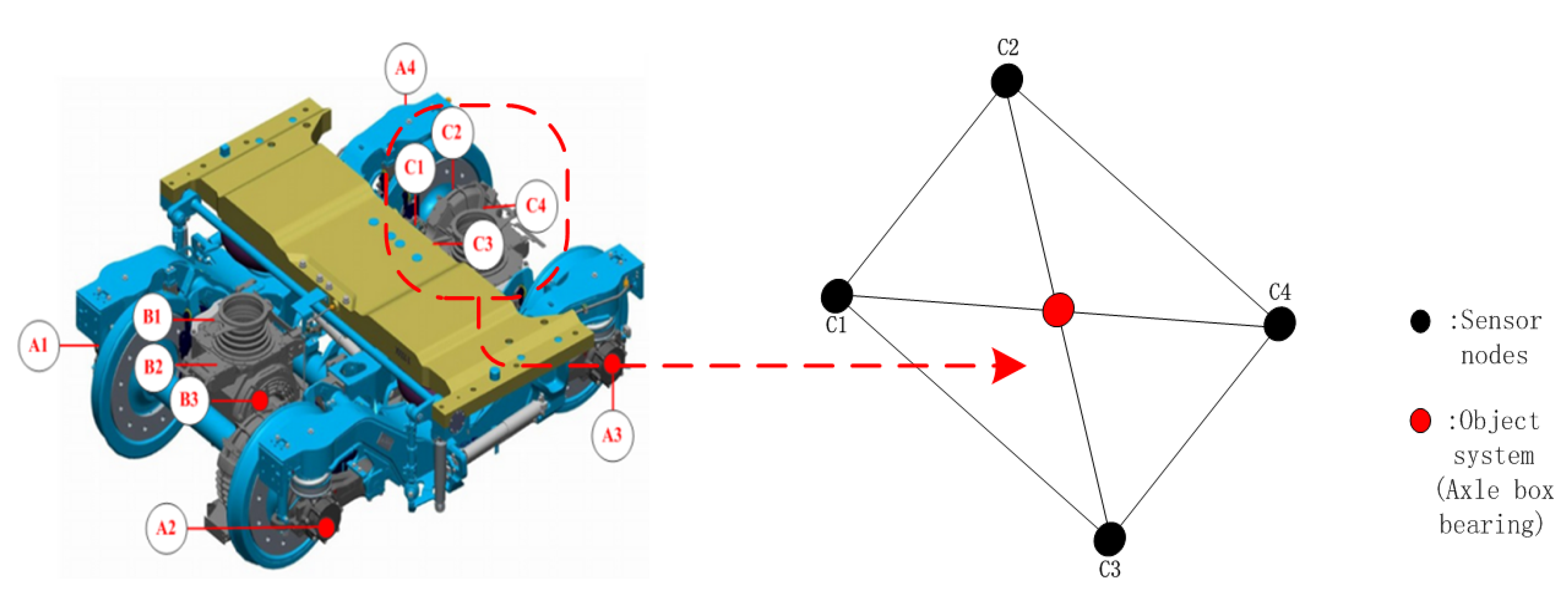
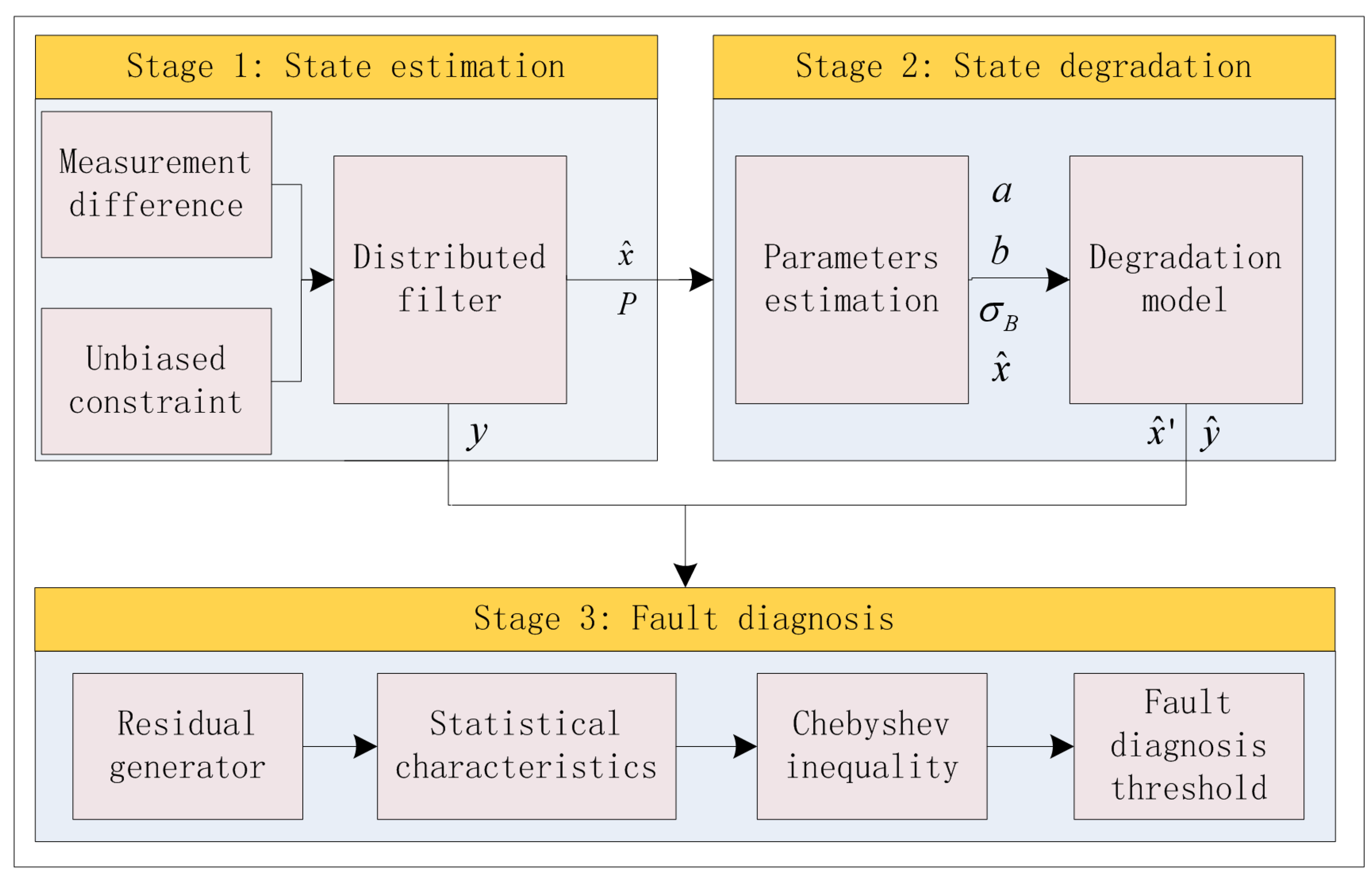
- Comprehensively consider the measuring point position and information acquisition method of a composite sensor. A distributed topology structure is established by taking the axle box bearing of an actual running gears system as an example. Based on this structure, a bilinear distributed filter is proposed, and the gain parameters of the filter are designed to minimize the mean square error.
- (2)
- Unbiased constraint conditions are used to reduce the impact of the initial unknown information of nodes on state estimation. By constructing the difference to deal with the problem of colored noise in real measurements, estimation accuracy is improved.
- (3)
- A nonlinear degradation model of the Wiener process considering temperature change characteristics is built to describe the state degradation phenomenon during train operation. The solution of nonlinear degradation process parameters is given by maximum likelihood estimation and combined with distributed filters to increase the accuracy of fault diagnosis.
2. Preliminaries and Problem Formulations
3. Main Results and Discussion
3.1. Multi-Sensor Filter
3.2. Parameter Estimation of State Degradation
3.3. Residual Generator Design
4. Practical Verifications and Discussion
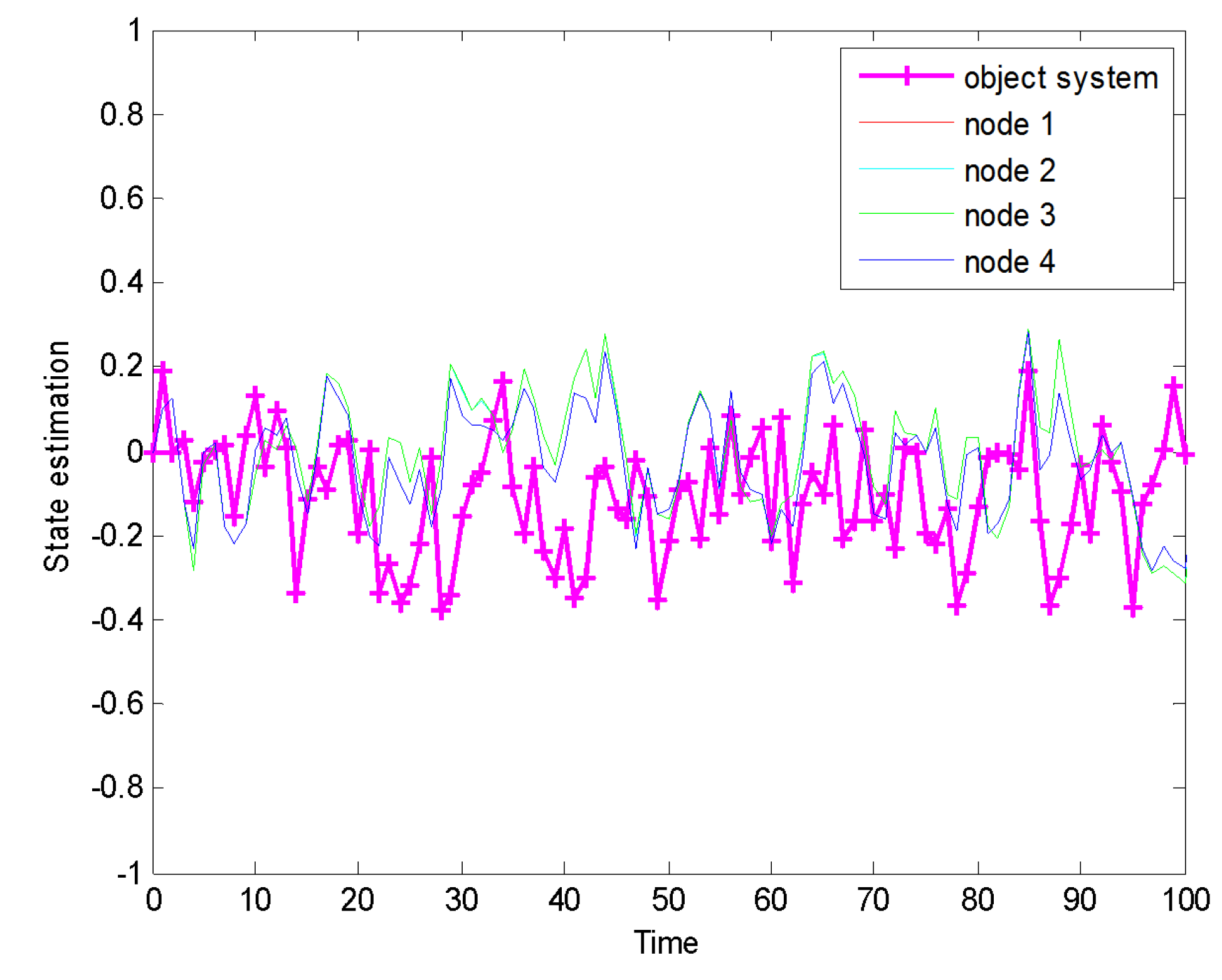
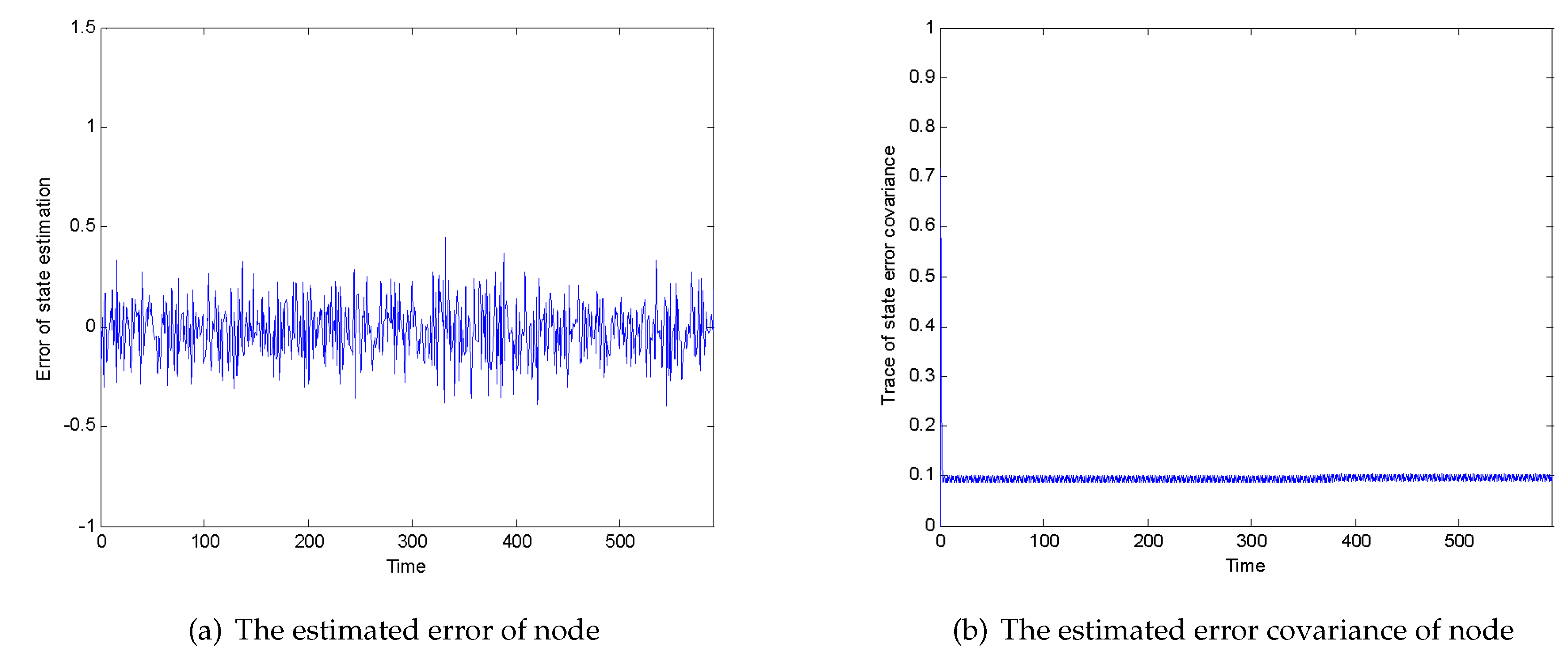
4.1. State Estimation
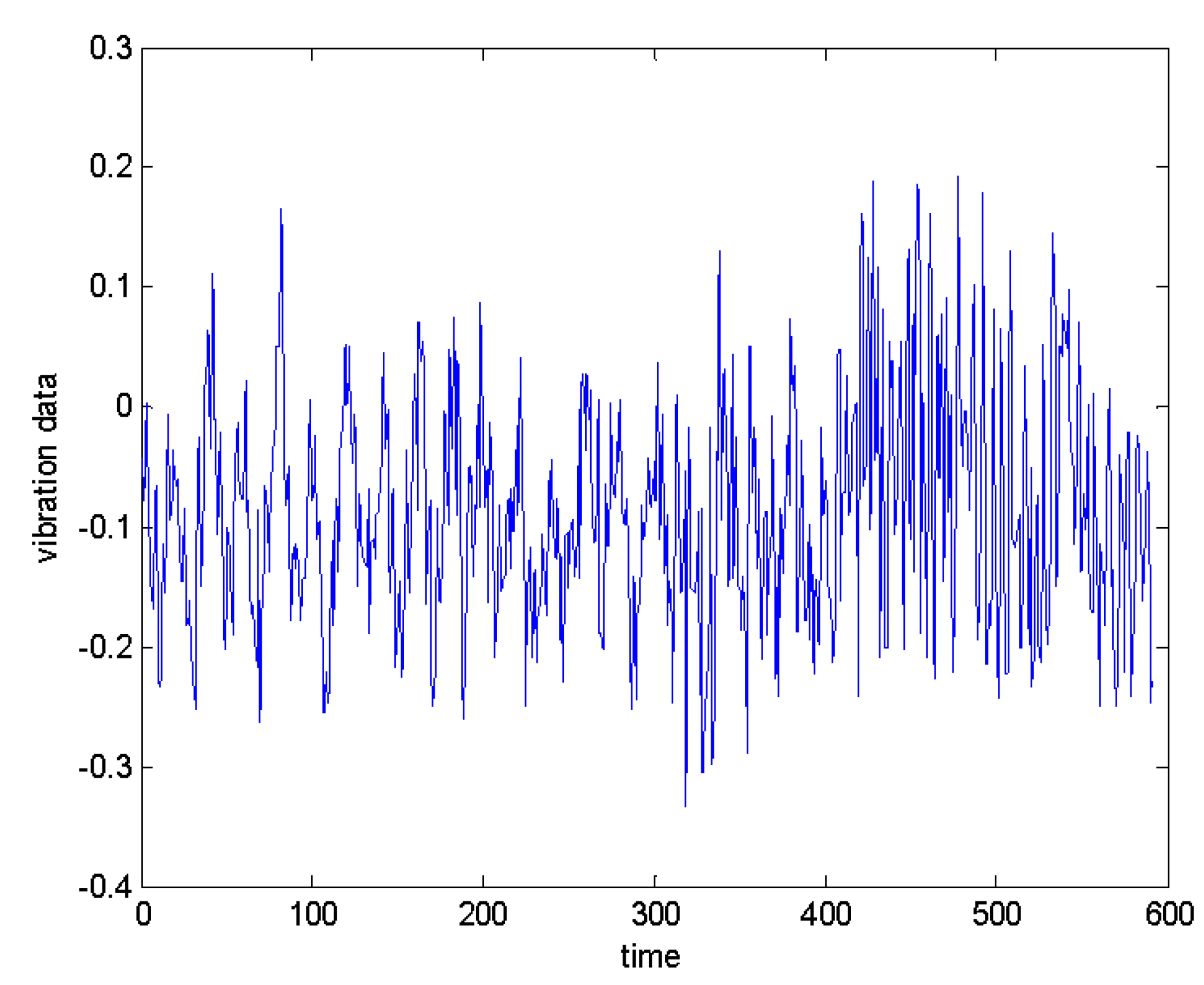
4.2. Cincinnati Dataset
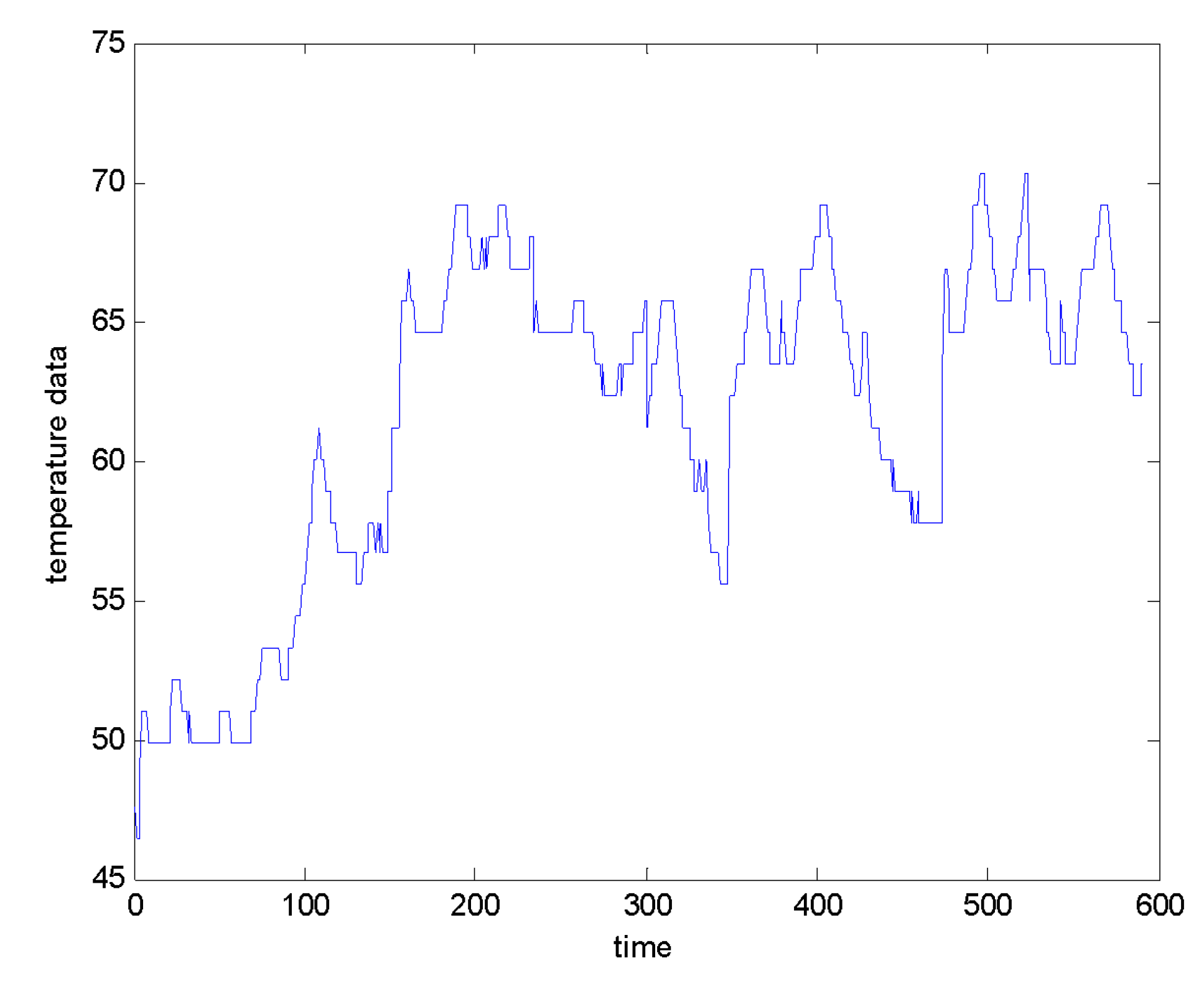
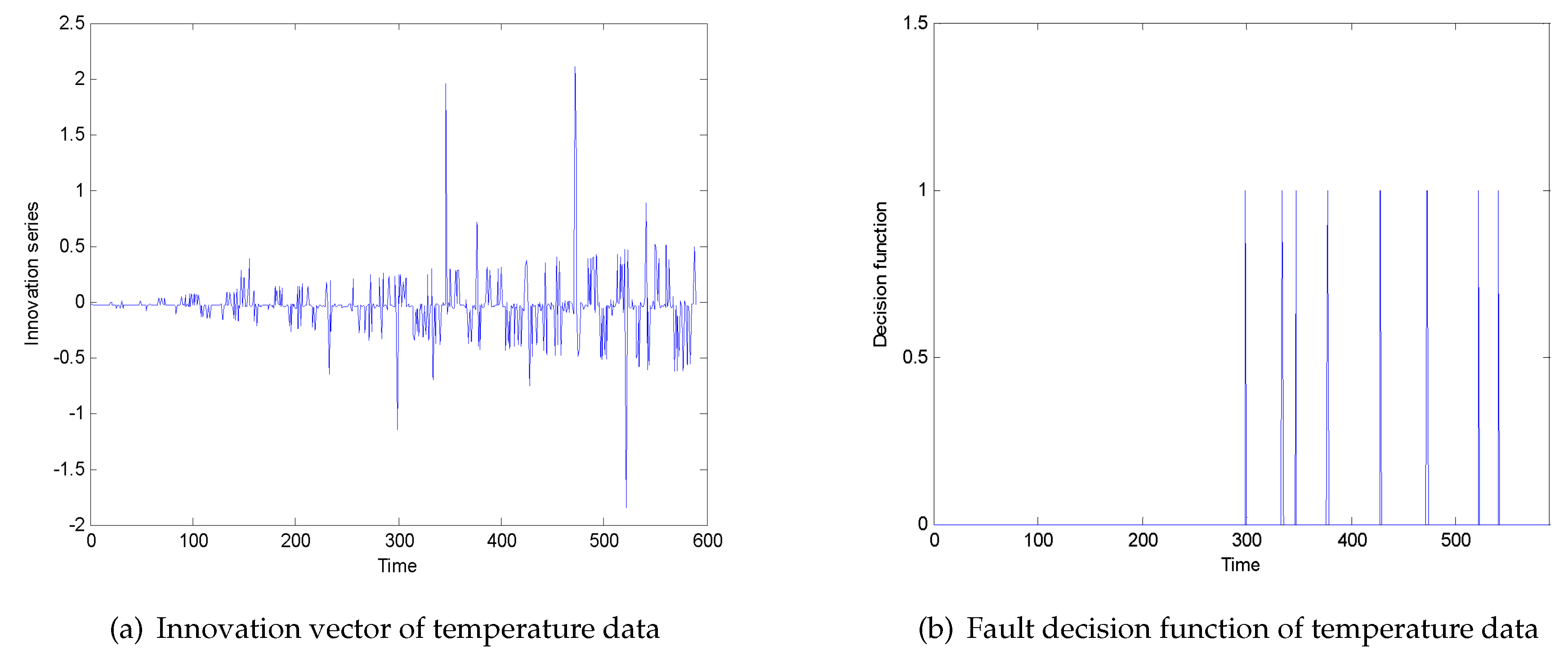
4.3. High-Speed Train Temperature Dataset
4.4. Performance Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ji, H.; He, X.; Shang, J.; Zhou, D. Incipient fault detection with smoothing techniques in statistical process monitoring. Control Eng. Pract. 2017, 62, 11–21. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Lu, N. A multi-mode incipient sensor fault detection and diagnosis method for electrical traction systems. Int. J. Control 2018, 16, 1783–1793. [Google Scholar] [CrossRef]
- Su, L.; Ma, L.; Qin, N.; Huang, D.; Andrew, H.K. Fault diagnosis of high-speed rrain bogie by residual-squeeze net. IEEE Trans. Ind. Inform. 2019, 15, 3856–3863. [Google Scholar] [CrossRef]
- Huang, J.; Yan, X. Quality-driven principal component analysis combined with kernel least squares for multivariate statistical process monitoring. IEEE Trans. Control Syst. Technol. 2019, 27, 2688–2695. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Lu, N.; Chen, W. Probability-relevant incipient fault detection and diagnosis methodology with applications to electric drive systems. IEEE Trans. Control Syst. Technol. 2018, 27, 2766–2773. [Google Scholar] [CrossRef]
- Wang, Z.; Jia, L.; Kou, L.; Qin, Y. Spectral kurtosis entropy and weighted SaE-ELM for bogie fault diagnosis under variable conditions. Sensors 2018, 18, 1705. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.; Chu, J.; Guo, P.; Chen, Z. Condition monitoring of wind turbine gearbox bearing based on deep learning model. IEEE Access 2019, 7, 57078–57097. [Google Scholar] [CrossRef]
- Zhou, R.; Bao, W.; Li, N.; Huang, X.; Yu, D. Mechanical equipment fault diagnosis based on redundant second generation wavelet packet transform. Digit. Signal Process. 2010, 20, 276–288. [Google Scholar] [CrossRef]
- Cai, B.; Liu, Y.; Fan, Q.; Zhang, Y.; Liu, Z.; Yu, S.; Ji, R. Multi-source information fusion based fault diagnosis of ground-source heat pump using Bayesian network. Appl. Energy 2014, 114, 1–9. [Google Scholar] [CrossRef]
- Irhoumah, M.; Pusca, R.; Lefevre, E.; Lefevre, E.; Mercier, D.; Romary, R.; Cristian, D. Information fusion with belief functions for detection of inter-turn short circuit faults in electrical machines using external flux sensors. IEEE Trans. Ind. Electron. 2017, 65, 2642–2652. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S. A survey of fault diagnosis and fault-tolerant techniques-part I: fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Yan, K.; Ji, Z.; Shen, W. Online fault detection methods for chillers combining extended kalman filter and recursive one-class SVM. Neurocomputing 2016, 228, 205–212. [Google Scholar] [CrossRef] [Green Version]
- Ning, Y.; Wang, J.; Han, H.; Tan, X.; Liu, T. An optimal radial basis function neural network enhanced adaptive robust kalman filter for GNSS/INS integrated systems in complex urban areas. Sensors 2018, 18, 3091. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Sun, Y.; Chang, C.l.; Hu, Y. Model-based fault detection and fault tolerant control of SCR urea injection system. IEEE Trans. Veh. Technol. 2016, 65, 4645–4654. [Google Scholar] [CrossRef]
- Akai, N.; Morales, Y.; Murase, H. Simultaneous pose and reliability estimation using convolutional neural network and Rao–Blackwellized particle filter. Adv. Robot. 2018, 32, 930–944. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, B.; Lu, N. A descriptor system approach for estimation of incipient faults with application to high-speed railway traction devices. IEEE Trans. Syst. Man Cybern. Syst. 2017, 49, 2108–2118. [Google Scholar] [CrossRef]
- Yin, J.; Xie, Y.; Chen, Z.; Peng, T. Weak-fault diagnosis using state-transition-algorithm-based adaptive stochastic-resonance method. J. Cent. South Univ. 2019, 26, 1910–1920. [Google Scholar] [CrossRef]
- Cadini, F.; Sbarufatti, C.; Corbetta, M.; Giglio, M. A particle filter-based model selection algorithm for fatigue damage identification on aeronautical structures. Struct. Control Health Monit. 2017, 24, 2002. [Google Scholar] [CrossRef]
- Jain, T.; Yame, J. Fault-tolerant economic model predictive control for wind turbines. IEEE Trans. Sustain. Energy 2018, 10, 1696–1704. [Google Scholar] [CrossRef]
- Bai, W.; Dong, H.; Yao, X.; Ning, B. Robust fault detection for the dynamics of high-speed train with multi-source finite frequency interference. ISA Trans. 2018, 75, 76–87. [Google Scholar] [CrossRef] [PubMed]
- He, J.; Li, Y.; Jiang, Y.; Li, Y.; Li, A. Propeller fault diagnosis based on a rank particle filter for autonomous underwater vehicles. Brodogr. Brodogr. Theory Pract. 2018, 69, 147–164. [Google Scholar] [CrossRef]
- Zhou, W.; Li, X.; Yi, J.; He, H. A novel UKF-RBF method based on adaptive noise factor for fault diagnosis in pumping unit. IEEE Trans. Ind. Inform. 2018, 15, 1415–1424. [Google Scholar] [CrossRef]
- Liu, S.; Jiang, B.; Mao, Z.; Ding, S. Adaptive backstepping based fault-tolerant control for high-speed trains with actuator faults. Int. J. Control Autom. Syst. 2019, 17, 1408–1420. [Google Scholar] [CrossRef]
- Gan, X.; Gao, W.; Dai, Z.; Liu, W. Research on WNN soft fault diagnosis for analog circuit based on adaptive UKF algorithm. Appl. Soft Comput. 2016, 50, 252–259. [Google Scholar]
- Jing, L.; Wang, T.; Zhao, M.; Wang, P. An adaptive multi-sensor data fusion method based on deep convolutional neural networks for fault diagnosis of planetary gearbox. Sensors 2017, 17, 414. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Z.; Guo, W.; Tang, Z.; Chen, Y. Multi-sensor data fusion using a relevance vector machine based on an ant colony for gearbox fault detection. Sensors 2015, 15, 21857–21875. [Google Scholar] [CrossRef] [Green Version]
- Niu, G.; Han, T.; Yang, B.; Tan, A. Multi-agent decision fusion for motor fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 1285–1299. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, T.; Das, S. Multi-sensor data fusion using support vector machine for motor fault detection. Inf. Sci. 2012, 217, 96–107. [Google Scholar] [CrossRef]
- Viegas, D.; Batista, P.; Oliveira, P.; Silvestre, C.; Chen, C.L.P. Distributed state estimation for linear multi-agent systems with time-varying measurement topology. Automatica 2015, 54, 72–79. [Google Scholar] [CrossRef]
- Chen, Z.; Cao, Y.; Ding, S.; Zhang, K.; Koenings, T.; Peng, T.; Yang, C.; Gui, W. A Distributed Canonical Correlation Analysis-based Fault Detection Method for Plant-wide Process Monitoring. IEEE Trans. Ind. Inform. 2019, 15, 2710–2720. [Google Scholar] [CrossRef]
- Cai, H.; Lewis, F.L.; Hu, G.; Huang, J. The adaptive distributed observer approach to the cooperative output regulation of linear multi-agent systems. Automatica 2017, 75, 299–305. [Google Scholar] [CrossRef]
- Mohammad, P.; Ehsan, H.; Amir, K.; Baris, F.; Bakhtiar, L.; Shih-ken, C.; Shreyas, S. Cooperative vehicle speed fault diagnosis and correction. IEEE Trans. Intell. Transp. Syst. 2018, 20, 783–789. [Google Scholar]
- Wu, C.; Zhu, C.; Ge, Y. A new fault diagnosis and prognosis technology for high-power lithium-ion battery. IEEE Trans. Plasma Sci. 2017, 45, 1533–1538. [Google Scholar] [CrossRef]
- Wang, X.; McArthur, S.; Strachan, S.; Kirkwood, J.; Paisley, B. A data analytic approach to automatic fault diagnosis and prognosis for distribution automation. IEEE Trans. Smart Grid 2018, 9, 6265–6273. [Google Scholar] [CrossRef] [Green Version]
- Yan, W.; Zhang, B.; Dou, W.; Liu, D.; Peng, Y. Low-cost adaptive lebesgue sampling particle filtering approach for real-time li-ion battery diagnosis and prognosis. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1601–1611. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | FNR | FPR |
|---|---|---|
| State-degraded distributed filter | 0.26% | 0.52% |
| Kalman filter | 1.28% | 6.03% |
| Extended Kalman filter | 2.04% | 5.46% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, C.; Wang, W.; Luo, H.; Zhang, B.; Cheng, G.; Teng, W. State-Degradation-Oriented Fault Diagnosis for High-Speed Train Running Gears System. Sensors 2020, 20, 1017. https://doi.org/10.3390/s20041017
Cheng C, Wang W, Luo H, Zhang B, Cheng G, Teng W. State-Degradation-Oriented Fault Diagnosis for High-Speed Train Running Gears System. Sensors. 2020; 20(4):1017. https://doi.org/10.3390/s20041017
Chicago/Turabian StyleCheng, Chao, Weijun Wang, Hao Luo, Bangcheng Zhang, Guoli Cheng, and Wanxiu Teng. 2020. "State-Degradation-Oriented Fault Diagnosis for High-Speed Train Running Gears System" Sensors 20, no. 4: 1017. https://doi.org/10.3390/s20041017
APA StyleCheng, C., Wang, W., Luo, H., Zhang, B., Cheng, G., & Teng, W. (2020). State-Degradation-Oriented Fault Diagnosis for High-Speed Train Running Gears System. Sensors, 20(4), 1017. https://doi.org/10.3390/s20041017