Evaluation of HoloLens Tracking and Depth Sensing for Indoor Mapping Applications


Abstract
:1. Introduction
2. Materials and Methods
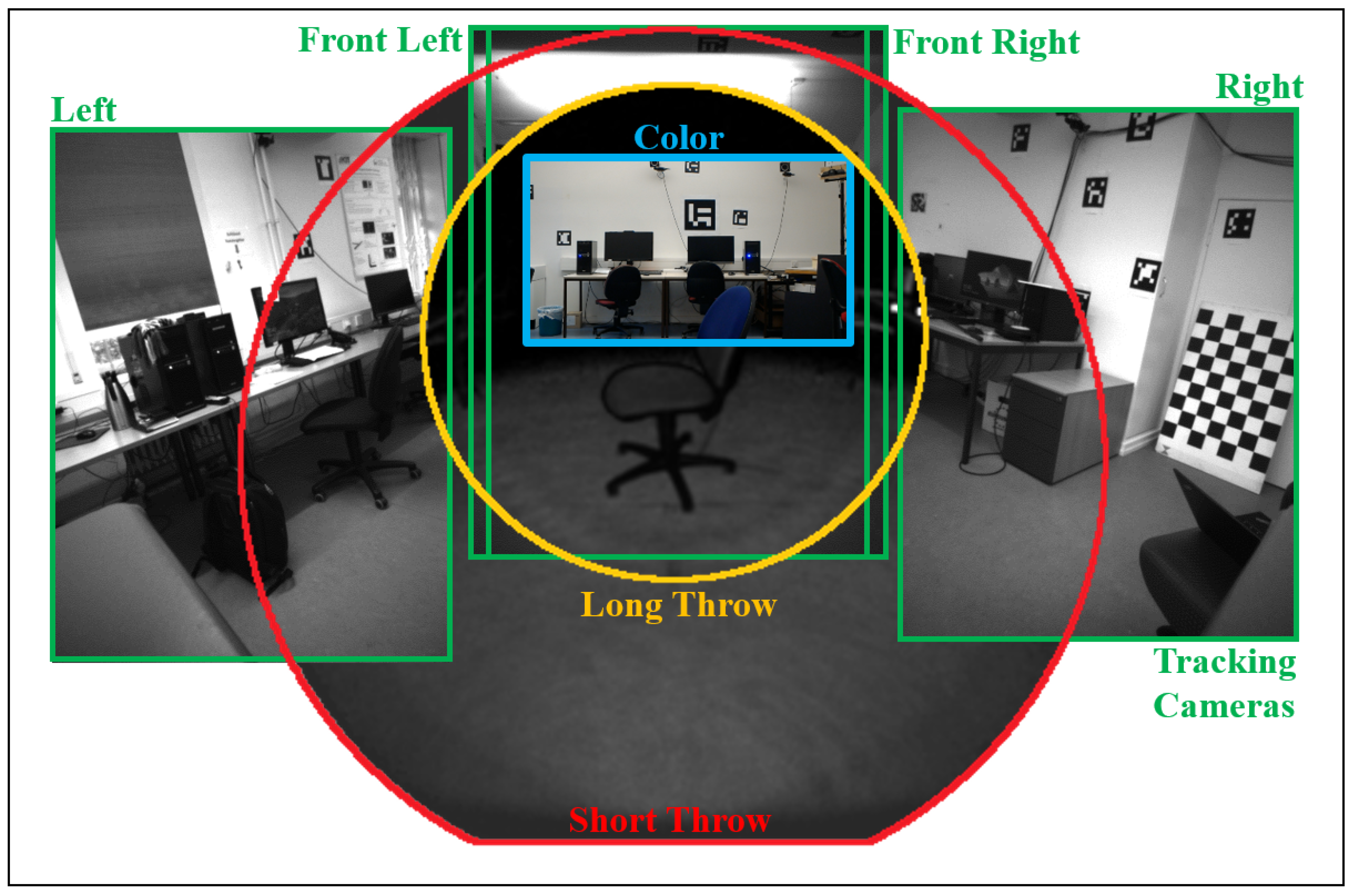
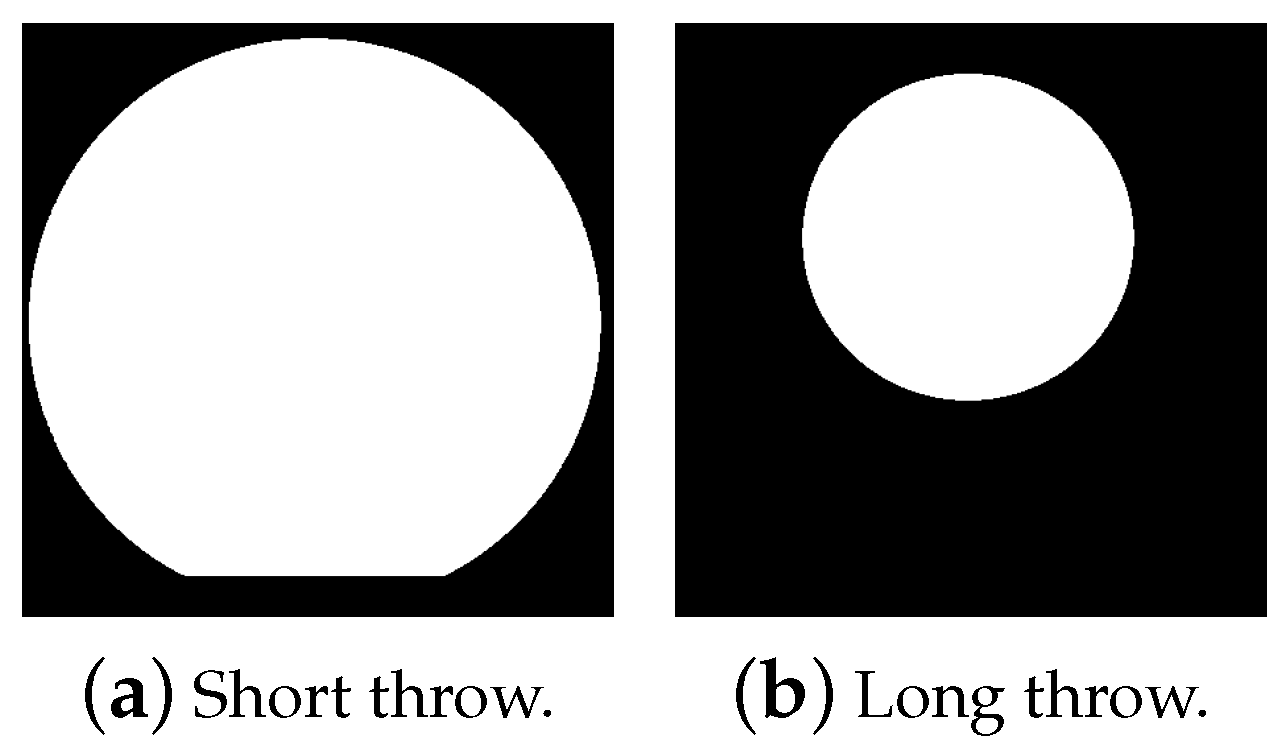
2.1. Sensor Description
2.2. Evaluation Method
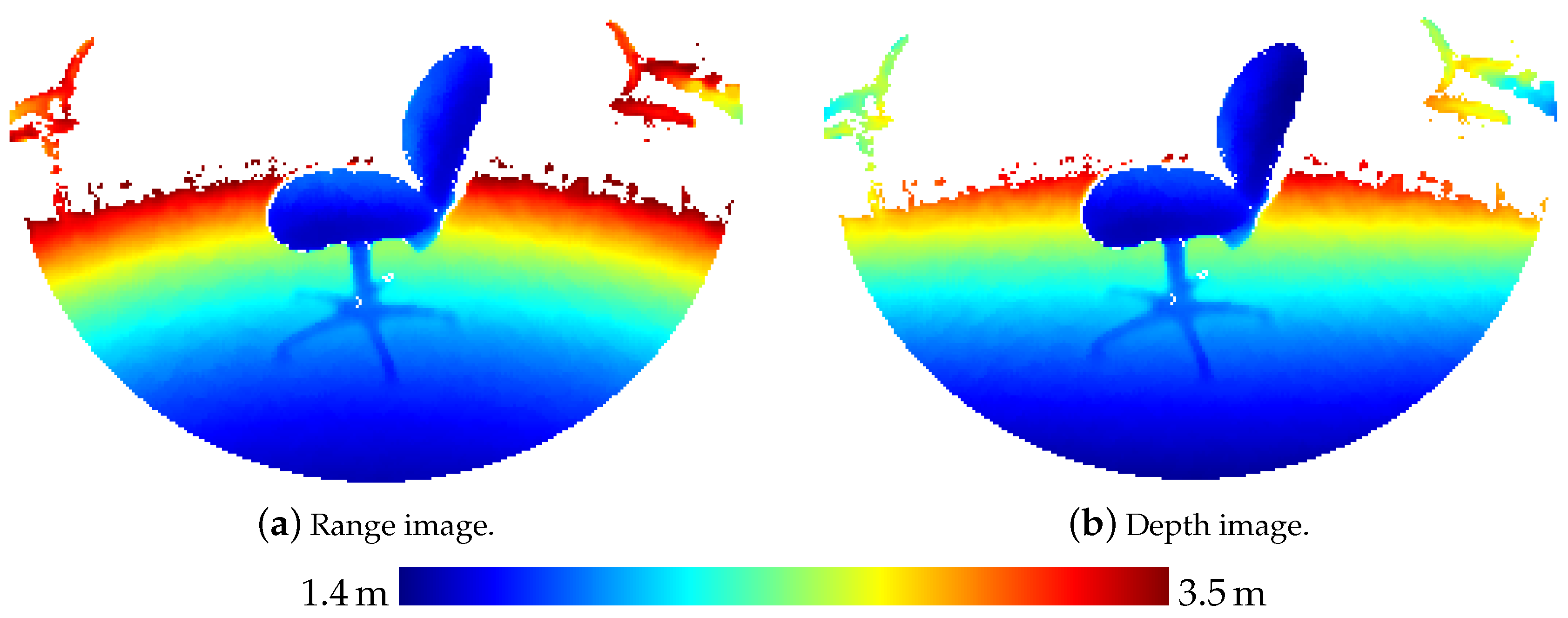
2.2.1. Depth Sensing
2.2.2. Tracking
2.2.3. Indoor Mapping
3. Results
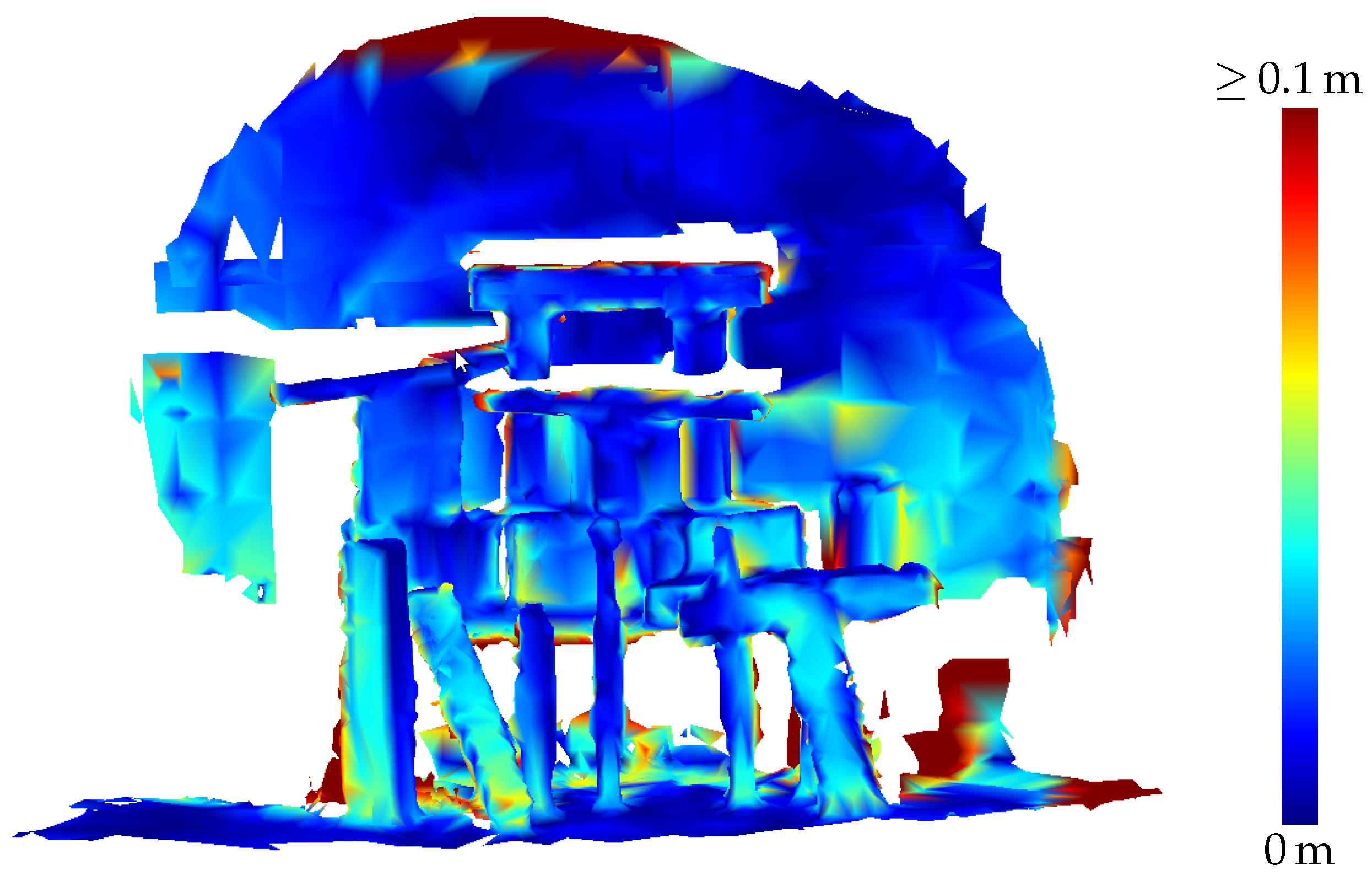
3.1. Depth Sensing
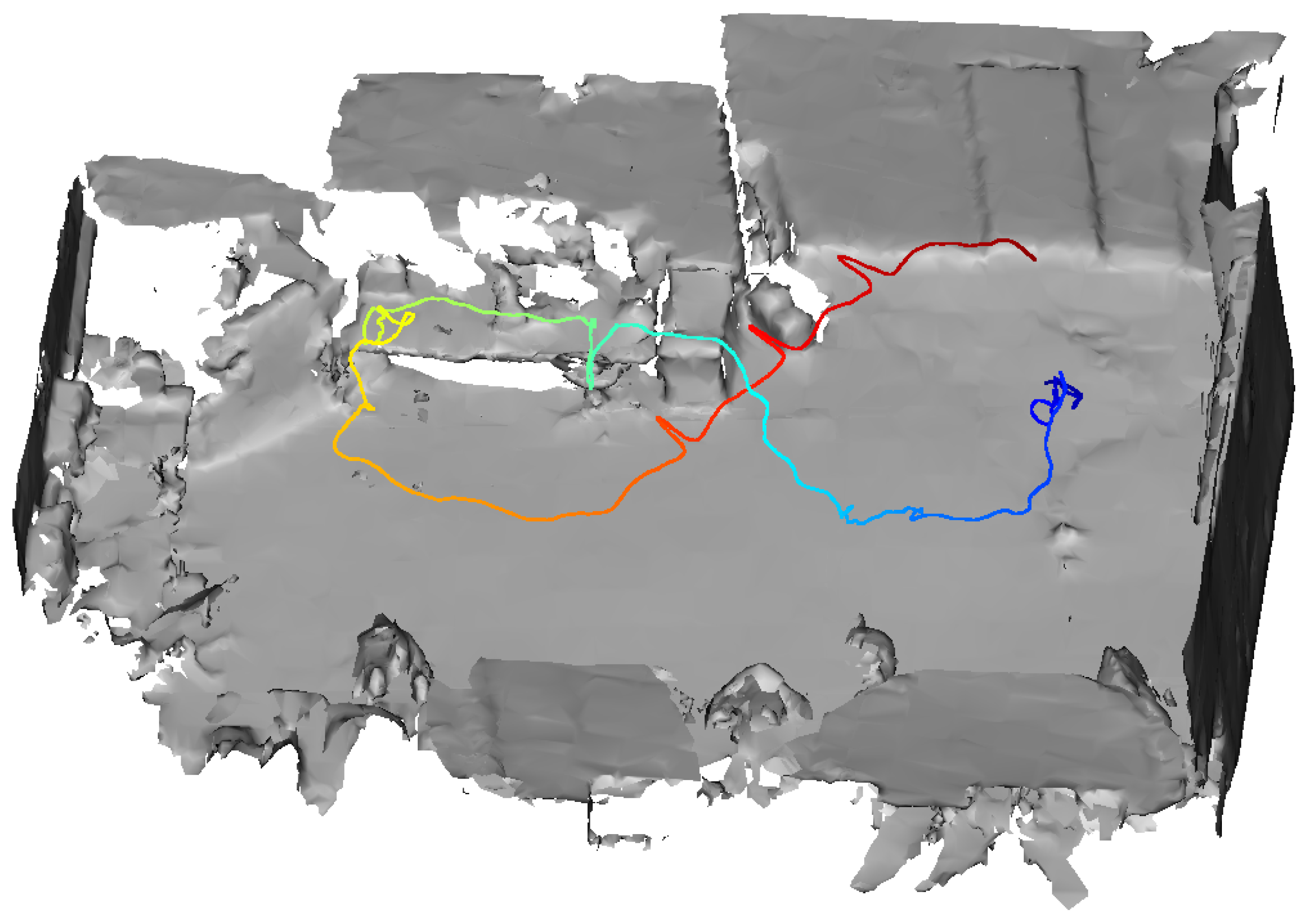
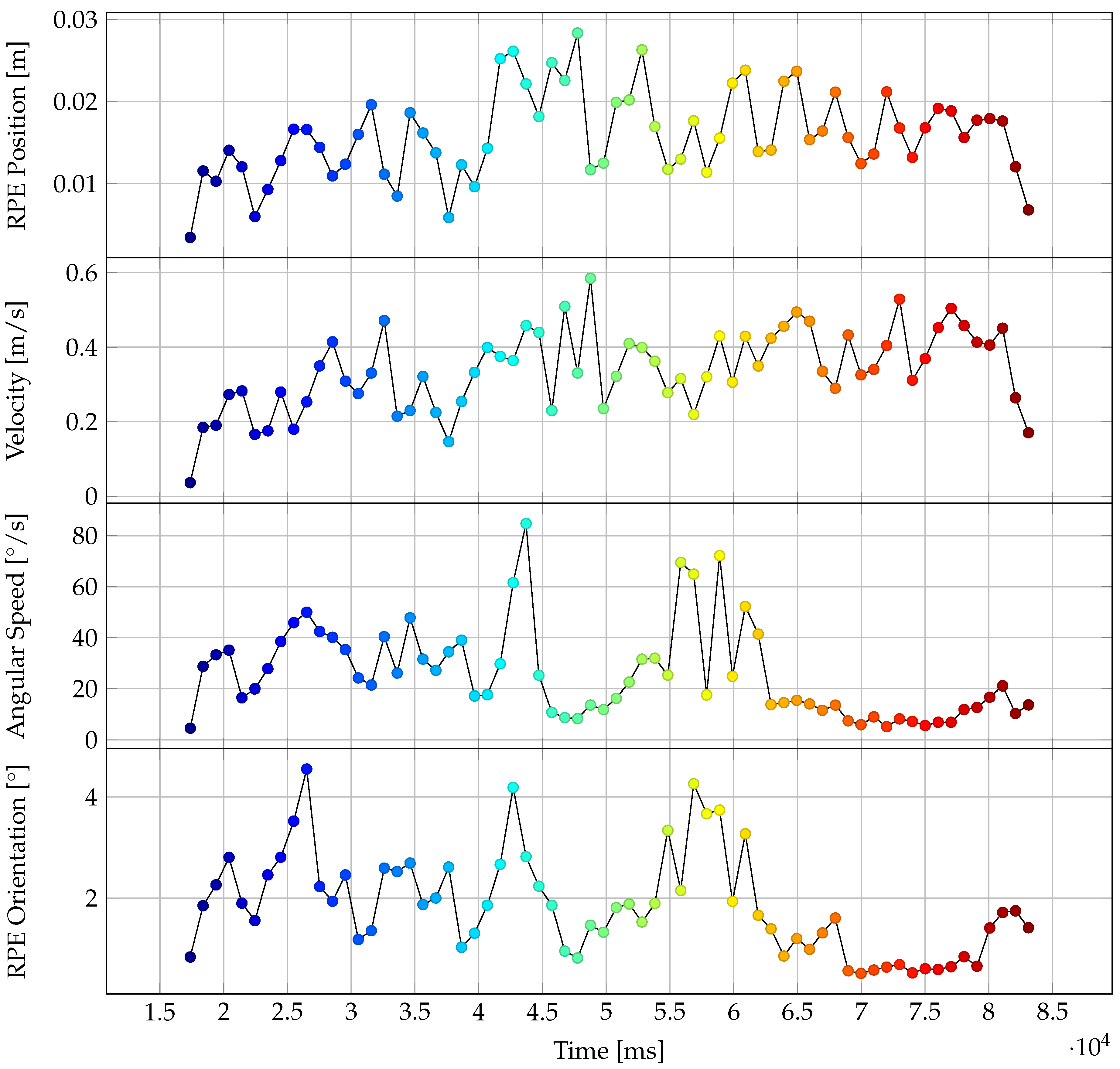
3.2. Tracking
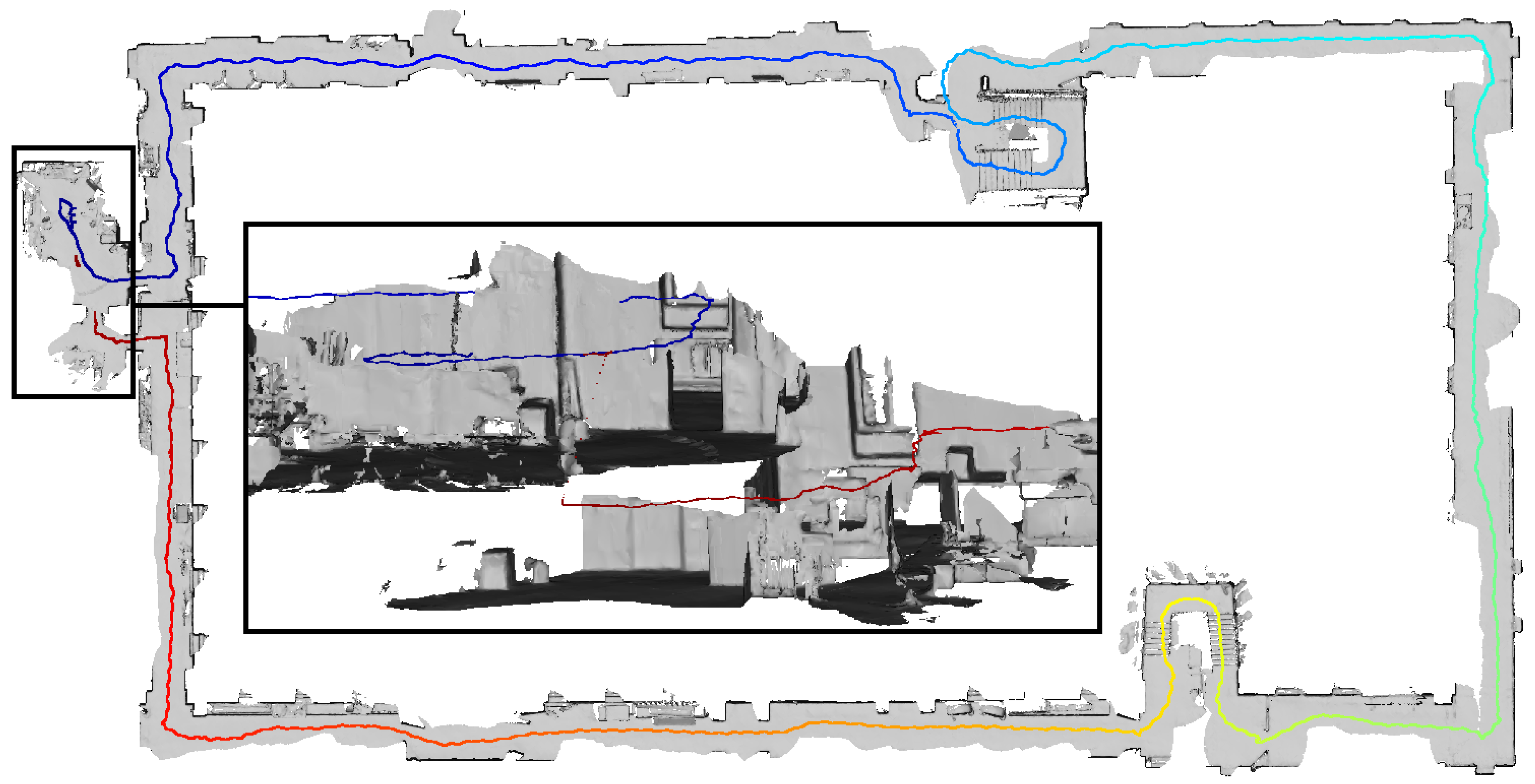
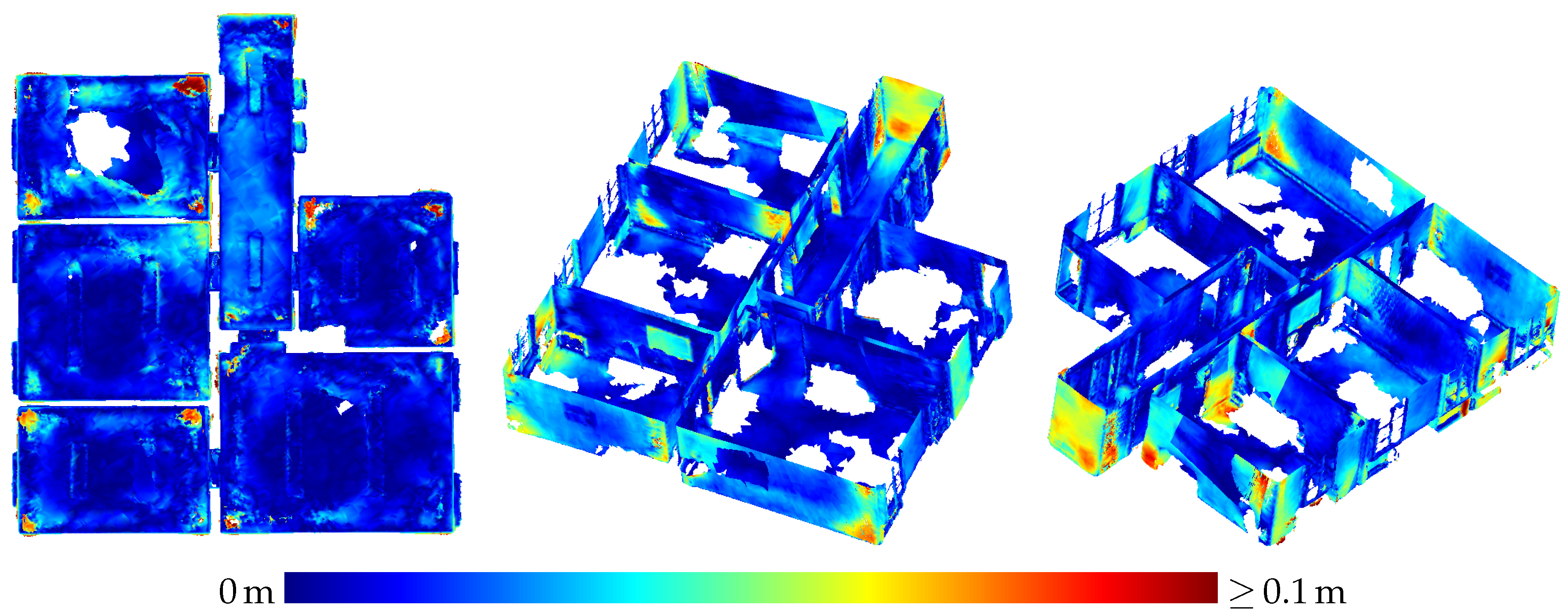
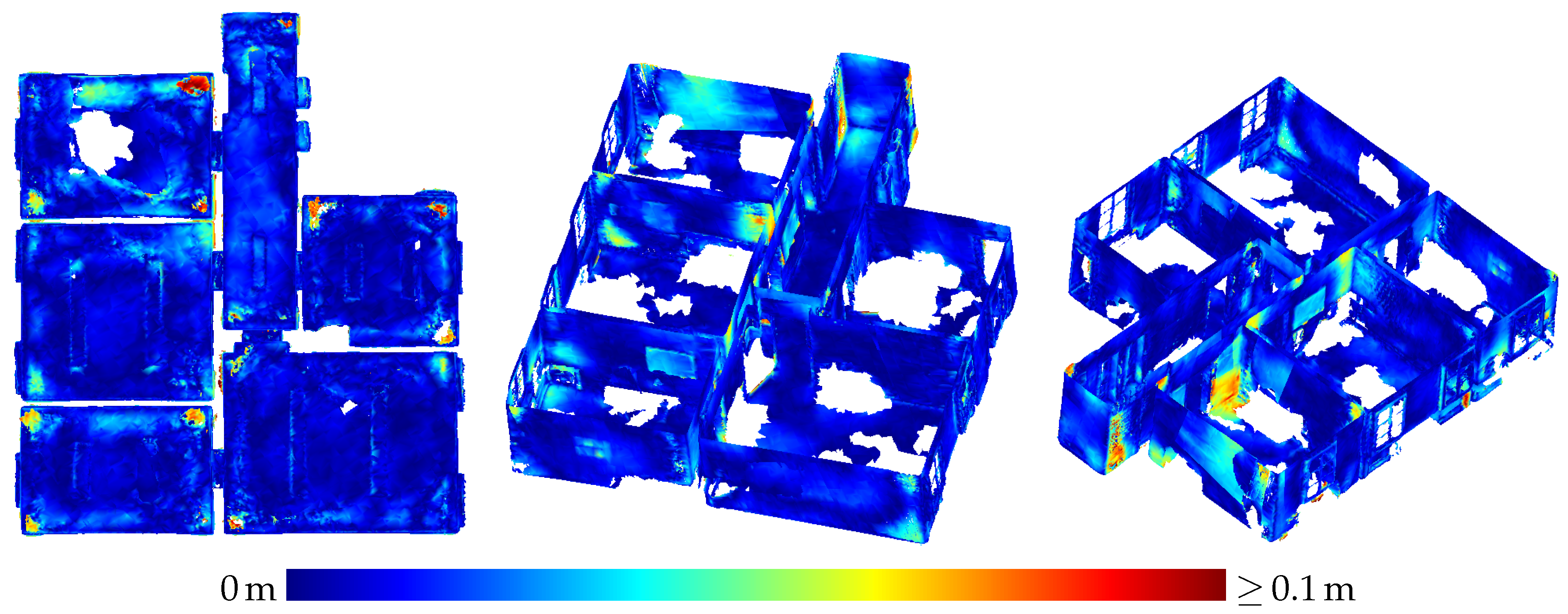
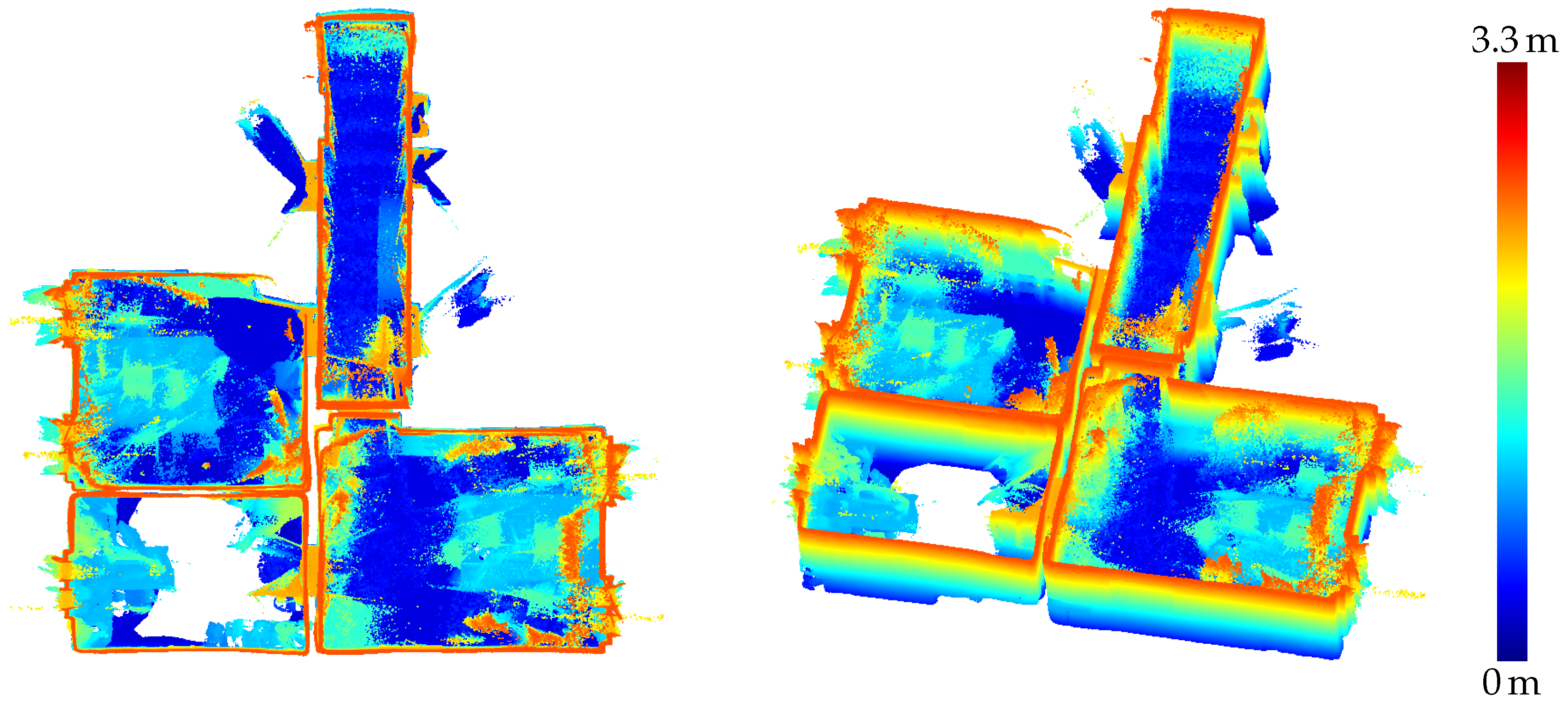
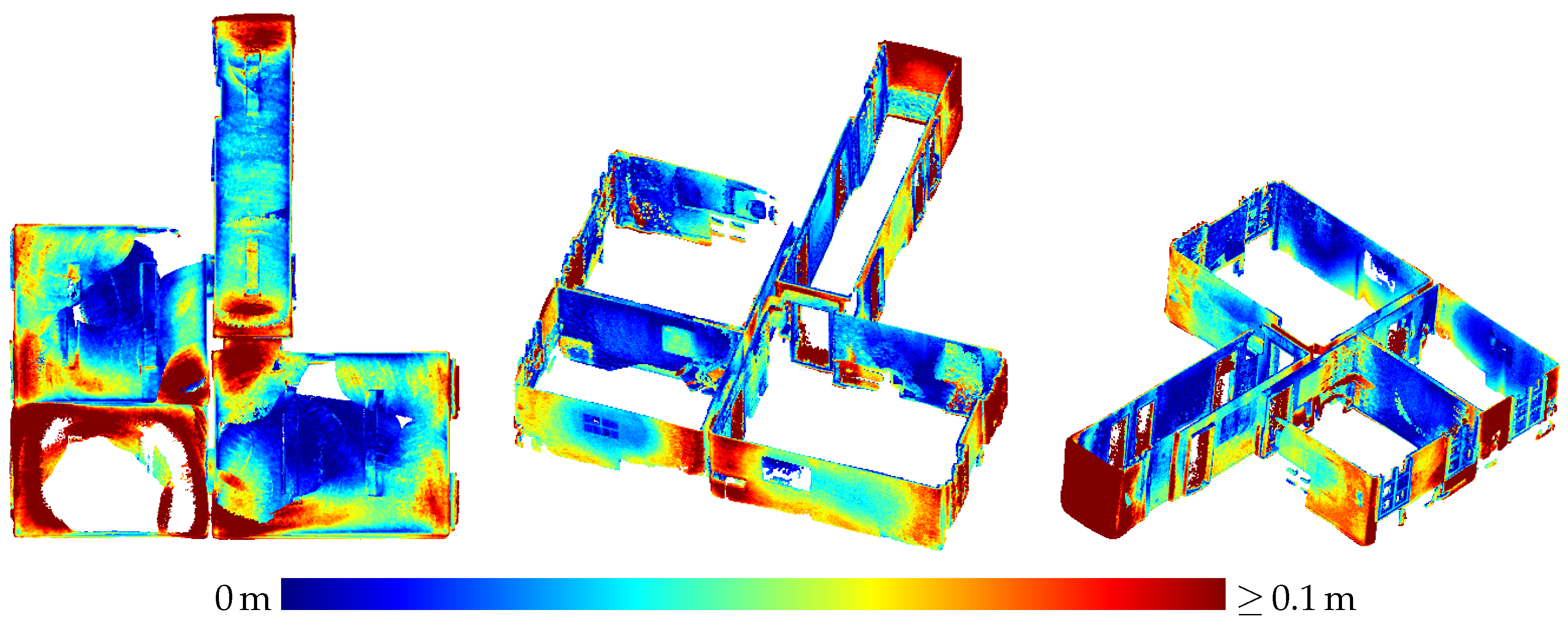
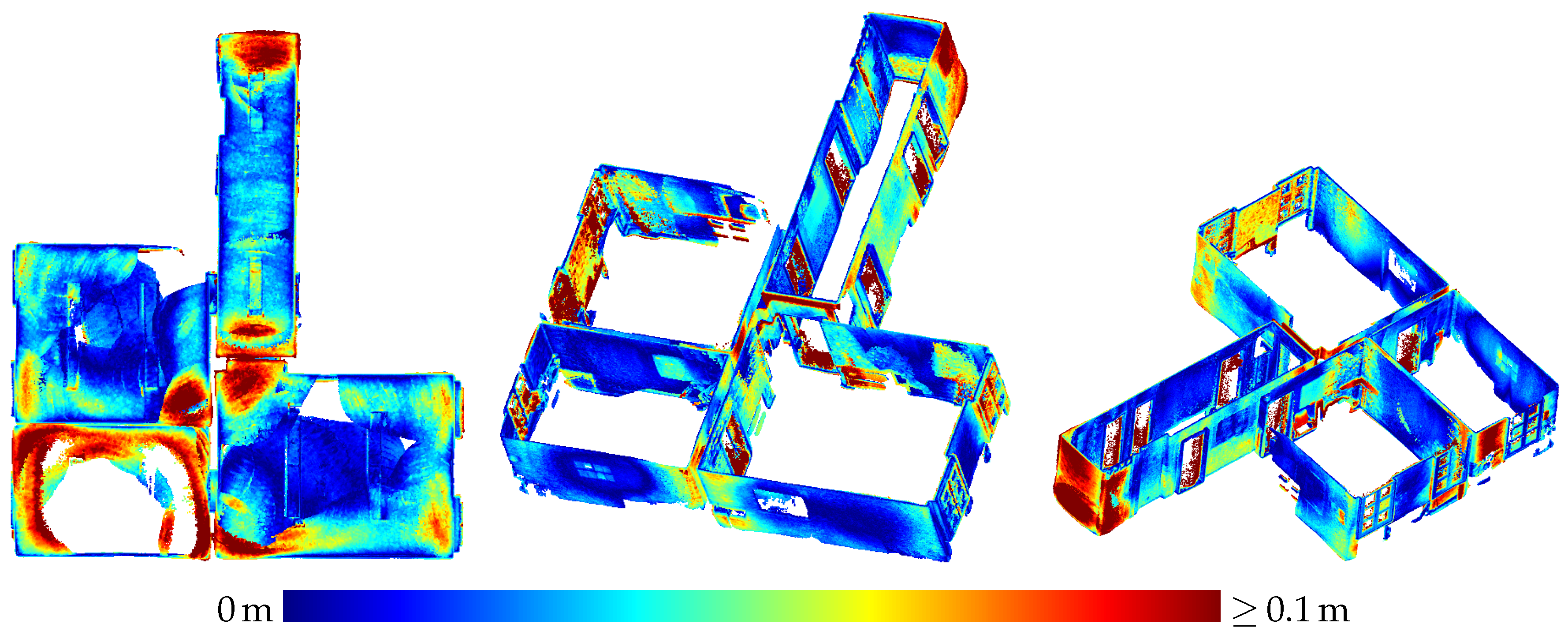
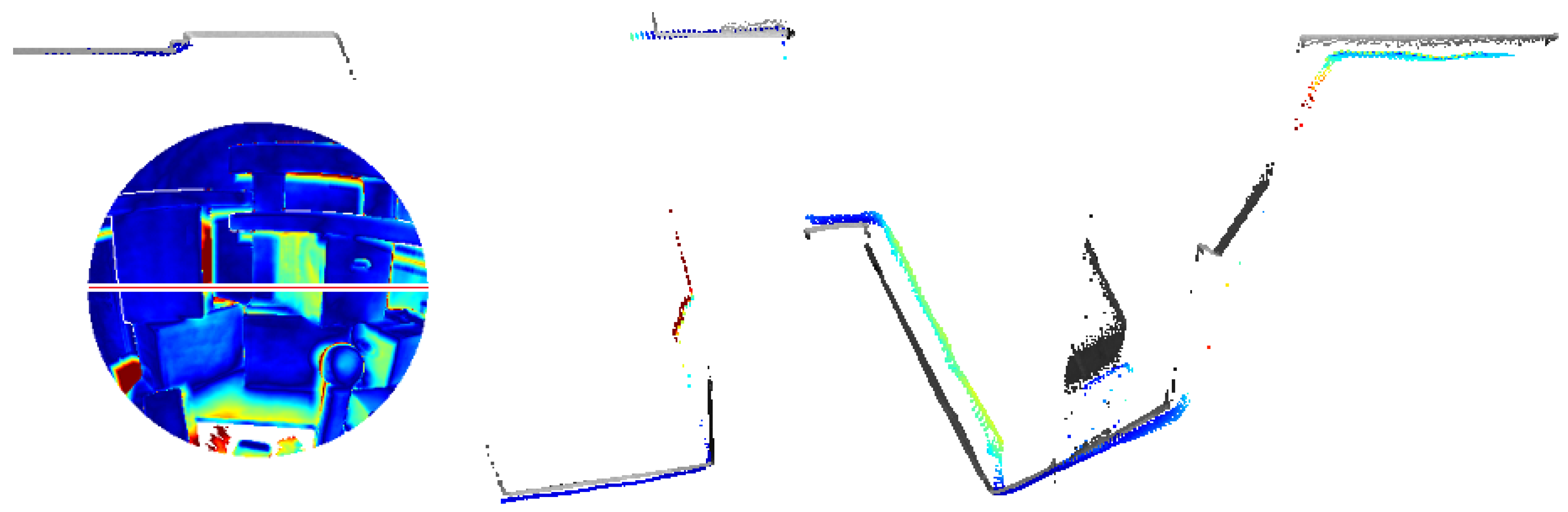
3.3. Indoor Mapping
4. Discussion
4.1. Depth Sensing
4.2. Tracking
4.3. Indoor Mapping
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Guhl, J.; Tung, S.; Kruger, J. Concept and architecture for programming industrial robots using augmented reality with mobile devices like microsoft HoloLens. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Kästner, L.; Lambrecht, J. Augmented-Reality-Based Visualization of Navigation Data of Mobile Robots on the Microsoft Hololens—Possibilities and Limitations. arXiv 2019, arXiv:1912.12109, 1–6. [Google Scholar]
- Aleksy, M.; Troost, M.; Scheinhardt, F.; Zank, G.T. Utilizing HoloLens to Support Industrial Service Processes. In Proceedings of the 2018 IEEE 32nd International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018; pp. 143–148. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, D.; Wang, H.; Yang, Z.H. Application of Mixed Reality Based on Hololens in Nuclear Power Engineering. In Nuclear Power Plants: Innovative Technologies for Instrumentation and Control Systems; Xu, Y., Sun, Y., Liu, Y., Wang, Y., Gu, P., Liu, Z., Eds.; Springer: Singapore, 2020; pp. 9–20. [Google Scholar]
- Naticchia, B.; Corneli, A.; Carbonari, A.; Bosché, F.; Principi, L. Augmented reality application supporting on-site secondary building assets management. In Proceedings of the Creative Construction Conference, Építészmérnöki Kar, Budapest, Hungary, 29 June–2 July 2019; pp. 806–811. [Google Scholar]
- Kunz, C.; Schneider, M.; Hlavac, M.; Zenth, D.; Pylatiuk, C.; Hein, B. Augmented Reality-Assisted Ventricular Puncture With Marker-Based Scene Registration. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, S151–S152. [Google Scholar]
- Foronda, C.L.; Alfes, C.M.; Dev, P.; Kleinheksel, A.J.; Nelson, D.A., Jr.; O’Donnell, J.M.; Samosky, J.T. Virtually nursing: Emerging technologies in nursing education. Nurse Educ. 2017, 42, 14–17. [Google Scholar] [CrossRef] [PubMed]
- Guo, W. Improving Engineering Education Using Augmented Reality Environment. In Learning and Collaboration Technologies. Design, Development and Technological Innovation; Zaphiris, P., Ioannou, A., Eds.; Springer: Cham, Switzerland, 2018; pp. 233–242. [Google Scholar]
- Liu, Y.; Dong, H.; Zhang, L.; Saddik, A.E. Technical Evaluation of HoloLens for Multimedia: A First Look. IEEE Multimed. 2018, 25, 8–18. [Google Scholar] [CrossRef]
- Vassallo, R.; Rankin, A.; Chen, E.C.S.; Peters, T.M. Hologram Stability Evaluation for Microsoft HoloLens. In SPIE 10136, Proceedings of the Medical Imaging 2017: Image Perception, Observer Performance, and Technology Assessment; SPIE: Bellingham, WA, USA, 2017; Volume 1013614, pp. 1–6. [Google Scholar]
- Zhang, L.; Dong, H.; Saddik, A.E. Towards a QoE Model to Evaluate Holographic Augmented Reality Devices. IEEE MultiMedia 2019, 26, 21–32. [Google Scholar] [CrossRef]
- Kirks, T.; Jost, J.; Uhlott, T.; Püth, J.; Jakobs, M. Evaluation of the Application of Smart Glasses for Decentralized Control Systems in Logistics. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 4470–4476. [Google Scholar]
- Hübner, P.; Landgraf, S.; Weinmann, M.; Wursthorn, S. Evaluation of the Microsoft HoloLens for the Mapping of Indoor Building Environments. In Proceedings of the Dreiländertagung der DGPF, der OVG und der SGPF, Vienna, Austria, 20–22 February 2019; pp. 44–53. [Google Scholar]
- Khoshelham, K.; Tran, H.; Acharya, D. Indoor Mapping Eyewear: Geometric Evaluation of Spatial Mapping Capability of HoloLens. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 805–810. [Google Scholar] [CrossRef] [Green Version]
- Khoshelham, K.; Oude Elberink, S. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [Green Version]
- Weinmann, M.; Wursthorn, S.; Jutzi, B. Semi-automatic image-based co-registration of range imaging data with different characteristics. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, XXXVIII-3/W22, 119–124. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Jorge, H.; Rodríguez-Gonzálvez, P.; Martínez-Sánchez, J.; González-Aguilera, D.; Arias, P.; Gesto, M.; Díaz-Vilariñoa, L. Metrological comparison between Kinect I and Kinect II sensors. Measurement 2015, 70, 21–26. [Google Scholar] [CrossRef]
- Lachat, E.; Macher, H.; Mittet, M.A.; Landes, T.; Grussenmeyer, P. First Experiences with Kinect V2 Sensor for Close Range 3D Modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 93–100. [Google Scholar] [CrossRef] [Green Version]
- Sarbolandi, H.; Lefloch, D.; Kolb, A. Kinect range sensing: Structured-light versus Time-of-Flight Kinect. Comput. Vis. Image Underst. 2015, 139, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Fürsattel, P.; Placht, S.; Balda, M.; Schaller, C.; Hofmann, H.; Maier, A.; Riess, C. A Comparative Error Analysis of Current Time-of-Flight Sensors. IEEE Trans. Comput. Imaging 2016, 2, 27–41. [Google Scholar] [CrossRef]
- Sturm, J.; Engelhard, N.; Endres, F.; Burgard, W.; Cremers, D. A Benchmark for the Evaluation of RGB-D SLAM Systems. In Proceedings of the International Conference on Intelligent Robot Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 573–580. [Google Scholar]
- Lehtola, V.V.; Kaartinen, H.; Nüchter, A.; Kaijaluoto, R.; Kukko, A.; Litkey, P.; Honkavaara, E.; Rosnell, T.; Vaaja, M.T.; Virtanen, J.P.; et al. Comparison of the Selected State-Of-The-Art 3D Indoor Scanning and Point Cloud Generation Methods. Remote Sens. 2017, 9, 796. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Tang, J.; Jiang, C.; Zhu, L.; Lehtomäki, M.; Kaartinen, H.; Kaijaluoto, R.; Wang, Y.; Hyyppä, J.; Hyyppä, H.; et al. The Accuracy Comparison of Three Simultaneous Localization and Mapping (SLAM)-Based Indoor Mapping Technologies. Sensors 2018, 18, 3228. [Google Scholar] [CrossRef] [Green Version]
- Nocerino, E.; Menna, F.; Remondino, F.; Toschi, I.; Rodríguez-Gonzálvez, P. Investigation of indoor and outdoor performance of two portable mobile mapping systems. In Videometrics, Range Imaging, and Applications XIV; Remondino, F., Shortis, M.R., Eds.; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA, 2017; Volume 10332, pp. 125–139. [Google Scholar] [CrossRef]
- Masiero, A.; Fissore, F.; Guarnieri, A.; Pirotti, F.; Visintini, D.; Vettore, A. Performance Evaluation of Two Indoor Mapping Systems: Low-Cost UWB-Aided Photogrammetry and Backpack Laser Scanning. Appl. Sci. 2018, 8, 416. [Google Scholar] [CrossRef] [Green Version]
- Blaser, S.; Cavegn, S.; Nebiker, S. Development of a Portable High Performance Mobile Mapping System Using the Robot Operating System. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, IV-1, 13–20. [Google Scholar] [CrossRef] [Green Version]
- Lagüela, S.; Dorado, I.; Gesto, M.; Arias, P.; González-Aguilera, D.; Lorenzo, H. Behavior Analysis of Novel Wearable Indoor Mapping System Based on 3D-SLAM. Sensors 2018, 18, 766. [Google Scholar] [CrossRef] [Green Version]
- Karam, S.; Peter, M.; Hosseinyalamdary, S.; Vosselman, G. An Evaluation Pipeline for Indoor Laser Scanning Point Clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, IV-1, 85–92. [Google Scholar] [CrossRef] [Green Version]
- Microsoft. Available online: https://developer.microsoft.com/en-us/windows/downloads/windows-10-sdk (accessed on 15 January 2020).
- Besl, P.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Zhang, Z. Iterative Point Matching for Registration of Free-Form Curves and Surfaces. Int. J. Comput. Vis. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Girardeau-Montaut, D. Available online: http://www.cloudcompare.org (accessed on 14 January 2020).
- Microsoft. Available online: https://github.com/microsoft/HoloLensForCV (accessed on 14 January 2020).
- OptiTrack. Available online: https://www.optitrack.com/products/prime-17w/ (accessed on 15 January 2020).
- Gao, X.S.; Hou, X.R.; Tang, J.; Cheng, H.F. Complete Solution Classification for the Perspective-three-point Problem. IEEE Trans. Pattern Recognit. Mach. Intell. 2003, 25, 930–943. [Google Scholar]
- Horn, B.K.P. Closed-Form Solution of Absolute Orientation Using Unit Quaternions. J. Opt. Soc. Am. A 1986, 4, 629–642. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera | Type | Field-of-View [°] | Image Size [pixels] | Effective Pixels [%] | Frame Rate [fps] | Data Type |
|---|---|---|---|---|---|---|
| Photo Video | Color | 40 × 25 | 1408 × 792 1344 × 756 1280 × 720 896 × 504 | 100 | 30 | BGRA8 a |
| Long Throw | Depth | 60 × 54 | 448 × 450 | 24 b | 1 c | Gray16 |
| Long Throw | Intensity | 60 × 54 | 448 × 450 | 24 b | 1c | Gray8 |
| Short Throw | Depth | 78 × 77 | 448 × 450 | 71 b | 15 | Gray16 |
| Short Throw | Intensity | 78 × 77 | 448 × 450 | 71 b | 15 | Gray8 |
| 4 × Tracking | Grayscale d | 60 × 50 | 160 × 480 d | 400 d | 30 | BGRA8 d |
| Horizontal Angle [°] | Vertical Angle [°] | Depth [m] | Noise [m] | Noise in Stable Pixels [m] | Fraction of Stable Pixels [%] | |
|---|---|---|---|---|---|---|
| (a) | 0.5 | 0.6 | 0.82 | 0.0018 | 0.0018 | 100 |
| 0.2 | 5.9 | 0.93 | 0.0025 | 0.0025 | 100 | |
| −1.9 | 4.3 | 1.08 | 0.0023 | 0.0023 | 100 | |
| −3.1 | 4.7 | 1.24 | 0.0028 | 0.0028 | 100 | |
| 2.5 | 3.8 | 1.41 | 0.0030 | 0.0030 | 100 | |
| 1.8 | 3.9 | 1.52 | 0.0032 | 0.0032 | 100 | |
| 0.1 | 4.8 | 1.72 | 0.0036 | 0.0036 | 100 | |
| −2.4 | 5.3 | 1.88 | 0.0038 | 0.0038 | 100 | |
| −0.9 | 4.7 | 2.07 | 0.0039 | 0.0039 | 100 | |
| 1.8 | 5.0 | 2.28 | 0.0042 | 0.0041 | 100 | |
| 3.9 | 5.0 | 2.56 | 0.0054 | 0.0044 | 95 | |
| 3.8 | 4.6 | 2.82 | 0.0070 | 0.0047 | 84 | |
| 3.8 | 4.5 | 3.05 | 0.0096 | 0.0054 | 74 | |
| 0.4 | 4.5 | 3.17 | 0.0113 | 0.0059 | 69 | |
| 5.6 | 5.2 | 3.33 | 0.0162 | 0.0072 | 51 | |
| 5.5 | 5.1 | 3.45 | 0.0201 | 0.0076 | 18 | |
| (b) | 0.1 | 4.8 | 1.72 | 0.0036 | 0.0036 | 100 |
| 13.1 | 5.8 | 1.84 | 0.0040 | 0.0040 | 100 | |
| 19.5 | 8.6 | 1.94 | 0.0049 | 0.0044 | 98 | |
| 37.8 | −2.0 | 1.89 | 0.0065 | 0.0053 | 96 | |
| 48.6 | −2.0 | 1.84 | 0.0067 | 0.0061 | 97 | |
| 58.6 | 1.1 | 1.69 | 0.0081 | 0.0076 | 97 | |
| 73.8 | −8.4 | 1.55 | 0.0103 | 0.0100 | 98 | |
| 80.8 | −29.6 | 1.38 | 0.0124 | 0.0121 | 99 |
| Recording | Mean Depth [m] | Mean Noise [m] | Mean Noise in Stable Pixels [m] | Mean Distance to Ground Truth [m] |
|---|---|---|---|---|
| Near | 1.30 | 0.0043 | 0.0042 | 0.0188 |
| Midrange | 2.02 | 0.0062 | 0.0060 | 0.0138 |
| Far | 2.64 | 0.0190 | 0.0104 | 0.0939 |
| Mesh | — | — | — | 0.0458 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hübner, P.; Clintworth, K.; Liu, Q.; Weinmann, M.; Wursthorn, S. Evaluation of HoloLens Tracking and Depth Sensing for Indoor Mapping Applications. Sensors 2020, 20, 1021. https://doi.org/10.3390/s20041021
Hübner P, Clintworth K, Liu Q, Weinmann M, Wursthorn S. Evaluation of HoloLens Tracking and Depth Sensing for Indoor Mapping Applications. Sensors. 2020; 20(4):1021. https://doi.org/10.3390/s20041021
Chicago/Turabian StyleHübner, Patrick, Kate Clintworth, Qingyi Liu, Martin Weinmann, and Sven Wursthorn. 2020. "Evaluation of HoloLens Tracking and Depth Sensing for Indoor Mapping Applications" Sensors 20, no. 4: 1021. https://doi.org/10.3390/s20041021
APA StyleHübner, P., Clintworth, K., Liu, Q., Weinmann, M., & Wursthorn, S. (2020). Evaluation of HoloLens Tracking and Depth Sensing for Indoor Mapping Applications. Sensors, 20(4), 1021. https://doi.org/10.3390/s20041021