MoreAir: A Low-Cost Urban Air Pollution Monitoring System

 ,
, 

Abstract
:1. Introduction
- We propose a novel approach to designing low-cost air pollution monitoring systems, which consists of a combination of (i) a novel sensor deployment strategy, based on mobile and nomadic sensors as well as on a prior medical survey, (ii) machine learning to perform model-based interpolation, and (iii) the Internet of Things to provide the users with real-time air quality data.
- We propose a methodology to build datasets which include pollutants’ concentrations, meteorological conditions, traffic-related features, and small-scale details of the different neighborhoods including social activities.
- We compare three machine learning models to predict pollutants’ concentrations: Multiple Linear Regression (MLR), Support Vector Regression (SVR) and Random Forest (RF). We show that RF and SVR better describe the non-linear impact of traffic flows and meteorology on PM concentrations.
- We show that in many disadvantaged neighborhoods in Morocco, social activities have a higher impact on air quality than road traffic.
2. IoT Platform
2.1. Sensor Node Development
- -
- MoreAir AQ-N: Nomadic sensor nodes (represented by a camel icon in Figure 1) with a better power supply but settled in one specific location during the collection process (the duration varies from 1 week to several months).
- -
- MoreAir AQ-M: Mobile sensor nodes (represented by the man icon in Figure 1) that operate on high capacity batteries but has a lower energy autonomy (around 24 h); the mobile sensor nodes are used to collect data while on the move to capture local concentrations variability and detect hot-spots.
- Computing Unit: a Raspberry Pi was used because it has sufficient computing power for data collection, and is easy to use and interface with the other sensors (Figure 2a).
- Sensing Unit: the concentrations of and were sampled using the NOVA PM SDS011 sensor (Figure 2b), which is a digital sensor based on a laser scattering principle for a reliable, accurate and stable output quality. Moreover, a temperature and humidity sensor (DHT22) was added to have a more precise information about the humidity and temperature in the monitored area (Figure 2c).
- Tracking Unit: each mobile sensor node is equipped with a Globalsat BU-353-s4 GPS to provide an estimate of its location (Figure 2d). Nomadic sensor nodes are not equipped with GPS.
- Transmission Unit: each sensor node is equipped with a USB 3G/4G modem to transmit the collected data in real time to our servers. For our application, Long Range (LoRa) and similar technologies are more suitable (and less expensive). However, in Morocco, the use of the frequencies associated with these technologies is still not open to the public. In addition to the flexibility of the 3G/4G technologies (especially for mobile sensors), the prices of cellular plans in Morocco are very low ($4 a month per sensor is more than enough for our application).
- Power Unit: each mobile sensor node is powered by 20,000 Ah Battery, and each nomadic sensor node is equipped with a 7 Ah battery and a solar panel.
- Data sensing: handles the data extraction, sampling and filtering processes.
- Data formatting: handles the pre-processing and the encapsulation of the data before transmission. This functionality is managed by a logical middleware between the nodes and the server.
- Data transmission: allows the sensor nodes to send data to the server over the Internet.
2.2. Sensor Node Evaluation
3. Deployment Strategy and Data Collection
3.1. Description of the Selected Sites
- -
- Street vendors: these include the large number of vendors of fresh fruit and vegetables, and vendors of cooked food using mostly open-air charcoal stoves. Another common type of street vendor found in Takaddoum’s streets are open-air thrift shops and clothes vendors.
- -
- Repair shops: Some streets of Takaddoum host many repair shops whose activities mainly take place outdoor. These include welding, carpentry, car and bicycle repair and servicing.
- -
- Open sewage impoundments, canals and conveyance systems: These do not only cause foul odor but also increased mold in the area.
- -
- Traditional baths and ovens: public bathhouses, known as hammams or Moroccan baths, are a living heritage sustained through many centuries and are still considered to be a strong tradition in Morocco. The number of operational hammams in Morocco, using the traditional heating system, varies between 6000 and 10,000 [37]. Public ovens (or communal ovens) are also still used by many people, particularly for baking bread. Often, the public bath and oven are co-located to share the same heating system. Studies indicate that each public bath-oven unit consumes between one and two tons of wood per day for both space and water heating [37,38,39]. The burning of such a large amount of firewood causes the release of large amounts of carbon dioxide and other air pollutants.
- -
- Building materials: in many countries, the use of certain materials, like sheet metal, is forbidden because of the numerous damages it has on human health [40]. The serious diseases related to inhaling low doses of the asbestos found in sheet metal include pulmonary fibrosis, bronchopulmonary cancers, and pleura or abdominal cavity [41,42,43]. All asbestos varieties are currently classified as carcinogens by the International Agency for Research on Cancer (IARC) [44]. Yet, this material is still used for construction in certain areas.
3.2. Sensor Deployment Strategy
3.3. Air Quality Data Collection
- and concentrations records in μg/m3,
- Temperature and relative humidity in °C and % respectively,
- GPS data (namely latitude, longitude and altitude); only for mobile sensor nodes,
- Timestamp associated with each measurement.
3.4. Pre-Processing
4. Descriptive Data Analysis
5. Machine Learning-Based Modeling
- Meteorological data is obtained from the temperature and humidity sensor of the sensor nodes, along with meteoblue, a website that gives open access to meteorological data .
- Traffic-related data is extracted from Google Traffic, as described in [51], which periodically captures Google Traffic maps as images and then applies image processing to extract the level of congestion on the main roads of the city.
- Features related to land use, building types and densities are extracted, using QGIS, from a 3D map of the city of Rabat provided by the city’s Urban Agency.
- Data on socio-economic activities are obtained by visual investigation of the different areas in which data collection was performed (localization of pollution sources such as hammams, public ovens, street vendors, etc.).
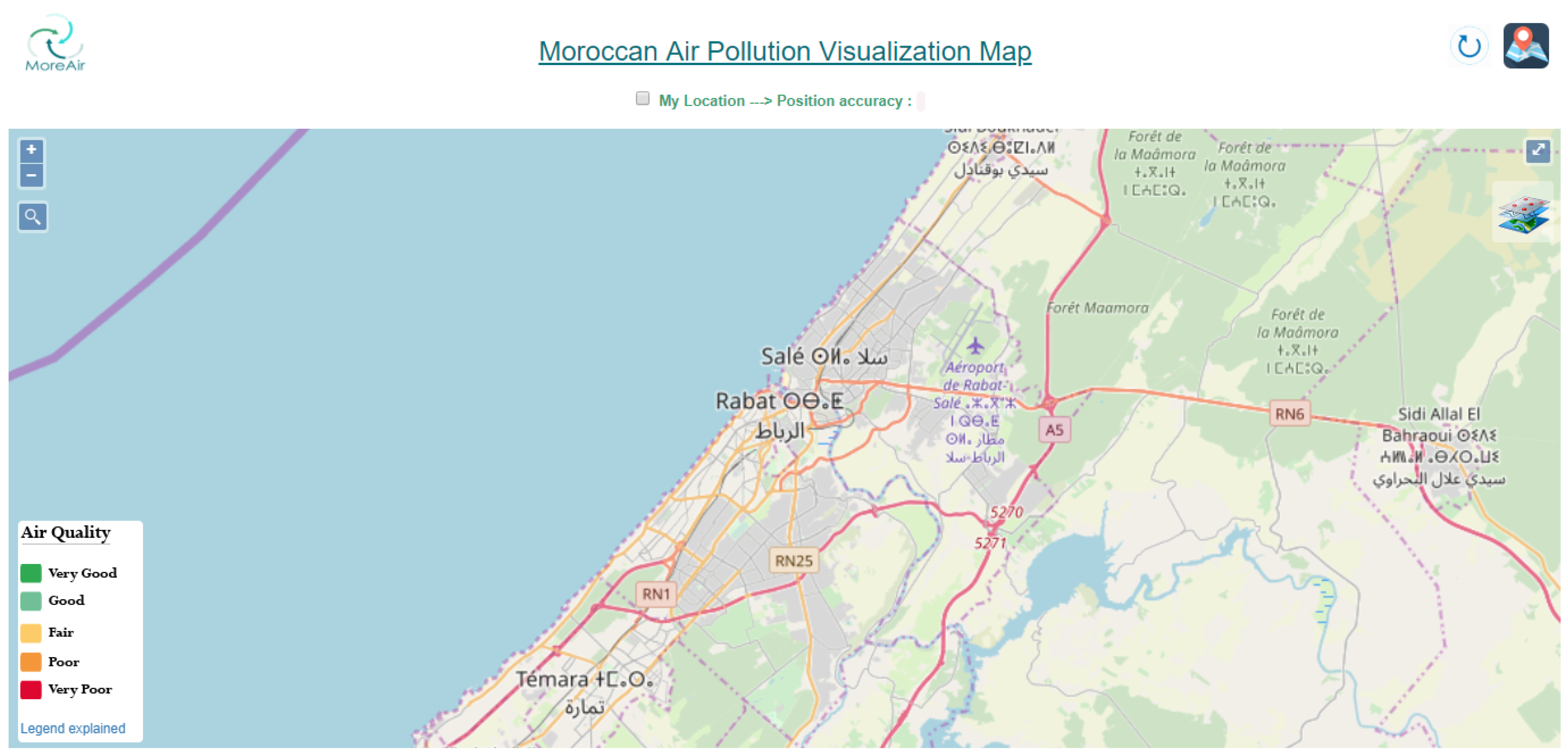
6. Moroccan Urban Air Quality Map
- allows a search by area address;
- shows the user’s position on the map and the associated accuracy
- allows a search by user GPS coordinates (latitude and longitude);
- shows the positions of the nomadic and mobile nodes on the map;
- shows a legend of air quality index with an explanation text;
- shows the pollutants’ visualization filter with color codes;
- Zooms on desired regions;
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- HEI. STATE OF GLOBAL AIR/2019. A Special Report on Global Exposure to Air Pollution and Its Disease Burden. Available online: http://www.stateofglobalair.org/sites/default/files/soga_2019_report.pdf (accessed on 5 February 2020).
- Ailshire, J.A.; Crimmins, E.M. Fine particulate matter air pollution and cognitive function among older US adults. Am. J. Epidemiol. 2014, 180, 359–366. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pöschl, U. Atmospheric aerosols: Composition, transformation, climate and health effects. Angew. Chem. Int. Ed. 2005, 44, 7520–7540. [Google Scholar] [CrossRef] [PubMed]
- Marć, M.; Tobiszewski, M.; Zabiegała, B.; de la Guardia, M.; Namiesnik, J. Current air quality analytics and monitoring: A review. Anal. Chim. Acta 2015, 853, 116–126. [Google Scholar] [CrossRef] [PubMed]
- Penza, M.; Suriano, D.; Pfister, V.; Prato, M.; Cassano, G. Urban Air Quality Monitoring with Networked Low-Cost Sensor-Systems. In Proceedings of the Eurosensors 2017, Paris, France, 3–6 September 2017. [Google Scholar]
- Automatic Urban and Rural Network (AURN). 2014. Available online: http://uk-air.defra.gov.uk (accessed on 5 February 2020).
- Air Quality Product Listing. The World Air Quality Project 2008–2019. Available online: https://aqicn.org/products/monitoring-stations (accessed on 5 February 2020).
- Kracht, O.; Santiago, J.L.; Martin, F.; Piersanti, A.; Cremona, G.; Righini, G.; Vitali, L.; Delaney, K.; Basu, B.; Ghosh, B.; et al. Spatial Representativeness of Air Quality Monitoring Sites—Outcomes of the FAIRMODE/AQUILA Intercomparison Exercise; JRC Technical Report; Publications Office of the European Union: Brussels, Belgium, 2018. [CrossRef]
- McKercher, G.R.; Salmond, J.A.; Vanos, J.K. Characteristics and applications of small, portable gaseous air pollution monitors. Environ. Pollut. 2017, 223, 102–110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Williams, D.E.; Henshaw, G.S.; Bart, M.; Laing, G.; Wagner, J.; Naisbitt, S.; Salmond, J.A. Validation of low-cost ozone measurement instruments suitable for use in an air-quality monitoring network. Meas. Sci. Technol. 2013, 24, 065803. [Google Scholar] [CrossRef]
- Mead, M.I.; Popoola, O.A.M.; Stewart, G.B.; Landshoff, P.; Calleja, M.; Hayes, M.; Baldovi, J.J.; McLeod, M.W.; Hodgson, T.F.; Dicks, J.; et al. The use of electrochemical sensors for monitoring urban air quality in low-cost, high-density networks. Atmos. Environ. 2013, 70, 186–203. [Google Scholar] [CrossRef] [Green Version]
- Mihaita, A.S.; Dupont, L.; Cherry, O.; Camargo, M.; Cai, C. Air Quality Monitoring Using Stationary Versus Mobile Sensing Units: A Case Study from Lorraine, France. In Proceedings of the 25th ITS World Congress 2018, Copenhagen, The Netherlands, 17–21 September 2018; pp. 1–11. [Google Scholar]
- McKercher, G.R.; Vanos, J.K. Low-cost mobile air pollution monitoring in urban environments: A pilot study in Lubbock, Texas. Environ. Technol. 2018, 39, 1505–1514. [Google Scholar] [CrossRef]
- Sm, S.N.; Reddy Yasa, P.; Mv, N.; Khadirnaikar, S.; Rani, P. Mobile monitoring of air pollution using low cost sensors to visualize spatio-temporal variation of pollutants at urban hotspots. Sustain. Cities Soc. 2019, 44, 520–535. [Google Scholar] [CrossRef]
- Shindler, L. Development of a low-cost sensing platform for air quality monitoring: Application in the city of Rome. Environ. Technol. 2019, 1–14. [Google Scholar] [CrossRef]
- Aurangojeb, M. Relationship between PM10, NO2 and particle number concentration: Validity of air quality controls. Procedia Environ. Sci. 2011, 6, 60–69. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Batterman, S. Air pollution and health risks due to vehicle traffic. Sci. Total Environ. 2013, 450, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, T.; Srivastava, R.K. Evaluation of environmental impacts of Integrated Industrial Estate—Pantnagar through application of air and water quality indices. Environ. Monit. Assess. 2011, 172, 547–560. [Google Scholar] [CrossRef] [PubMed]
- Banerjee, T.; Barman, S.C.; Srivastava, R.K. Application of air pollution dispersion modeling for source-contribution assessment and model performance evaluation at integrated industrial estate-Pantnagar. Environ. Pollut. 2011, 159, 865–875. [Google Scholar] [CrossRef] [PubMed]
- Siwek, K.; Osowski, S. Data mining methods for prediction of air pollution. Int. J. Appl. Math. Comput. Sci. 2016, 26, 467–478. [Google Scholar] [CrossRef] [Green Version]
- MEDE. Bilan de la qualité de l’air en France en 2012. 2012. Available online: https://www.airparif.asso.fr/_pdf/publications/2012.pdf (accessed on 5 February 2020).
- Wallace, J.; Kanaroglou, P. Modeling NOx and NO2 emissions from mobile sources: A case study for Hamilton, Ontario, Canada. Transp. Res. Part D Transp. Environ. 2008, 13, 323–333. [Google Scholar] [CrossRef]
- Rybarczyk, Y.; Zalakeviciute, R. Machine Learning Approaches for Outdoor Air Quality Modelling: A Systematic Review. Appl. Sci. 2018, 8, 2570. [Google Scholar] [CrossRef] [Green Version]
- Karagulian, F.; Gerboles, M.; Barbiere, M.; Kotsev, A.; Lagler, F.; Borowiak, A. Review of Sensors for Air Quality Monitoring; EUR 29826 EN; Publications Office of the European Uion: Luxembourg, 2019; ISBN 978-92-76-09255-1. [CrossRef]
- The US Environmental Protection Agency. Evaluation of Elm and Speck Sensors. EPA/600/R-15/314. Available online: https://publications.jrc.ec.europa.eu/repository/bitstream/JRC116534/kjna29826enn.pdf (accessed on 5 February 2020).
- iScape. Summary of Air Quality Sensors and Recommendations for Application. iScape Project D1.5. February 2017. Available online: https://www.iscapeproject.eu/wp-content/uploads/2017/09/iSCAPE_D1.5_Summary-of-air-quality-sensors-and-recommendations-for-application.pdf (accessed on 5 February 2020).
- Cavaliere, A.; Carotenuto, F.; Di Gennaro, F.; Gioli, B.; Gualtieri, G.; Martelli, F.; Matese, A.; Toscano, P.; Vagnoli, C.; Zaldei, A. Development of Low-Cost Air Quality Stations for Next Generation Monitoring Networks: Calibration and Validation of PM2.5 and PM10 Sensors. Sensors 2018, 18, 2843. [Google Scholar] [CrossRef] [Green Version]
- Williams, R.; Kilaru, V.; Snyder, E.; Kaufman, A.; Dye, T.; Rutter, A.; Russell, A.; Hafner, H. Air Sensor Guidebook; United States Environmental Protection Agency (US-EPA): Washington, DC, USA, 2014.
- SIDEPAK™ PERSONAL AEROSOL MONITOR MODEL AM510. Available online: www.tsi.com (accessed on 5 February 2020).
- Laquai, B. Particle Distribution Dependent Inaccuracy of the Plantower PMS5003 Lowcost PM-Sensor. 2017. Available online: https://www.researchgate.net/publication/320555036_Particle_Distribution_Dependent_Inaccuracy_of_the_Plantower_PMS5003_low-cost_PM-sensor/citation/download (accessed on 5 February 2020).
- Cordero, J.M.; Borge, R.; Narros, A. Using statistical methods to carry out in field calibrations of low cost air quality sensors. Sens. Actuators B Chem. 2018, 267, 245–254. [Google Scholar] [CrossRef]
- Badura, M.; Batog, P.; Drzeniecka-Osiadacz, A.; Modzel, P. Optical particulate matter sensors in PM 2.5 measurements in atmospheric air. E3S Web Conf. 2018, 44, 00006. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.-Y.; Schneider, P.; Haugen, R.; Vogt, M. Performance Assessment of a Low-Cost PM2.5 Sensor for a near Four-Month Period in Oslo, Norway. Atmosphere 2019, 10, 41. [Google Scholar] [CrossRef] [Green Version]
- Alphasense. Available online: http://www.alphasense.com/index.php/products/optical-particle-counter/ (accessed on 25 December 2019).
- Sousan, S.; Koehler, K.; Hallett, L.; Peters, T.M. Evaluation of the Alphasense optical particle counter (OPC-N2) and the Grimm portable aerosol spectrometer (PAS-1.108). Aerosol Sci. Technol. 2016, 50, 1352–1365. [Google Scholar] [CrossRef] [PubMed]
- Crilley, L.R.; Shaw, M.; Pound, R.; Kramer, L.J.; Price, R.; Young, S.; Lewis, A.C.; Pope, F.D. Evaluation of a low-cost optical particle counter (Alphasense OPC-N2) for ambient air monitoring. Atmos. Meas. Tech. 2018, 11, 709–720. [Google Scholar] [CrossRef] [Green Version]
- Sibley, M.; Sibley, M. Hybrid Transitions: Combining Biomass and Solar Energy for Water Heating in Public Bathhouses. Energy Procedia 2015, 83, 525–532. [Google Scholar] [CrossRef] [Green Version]
- Anne Sophie-Martin. 10 000 hammams traditionnels au Maroc. La Vie économique. 20 October 2011. Available online: https://www.lavieeco.com/economie/10-000-hammams-traditionnels-au-maroc-20504/ (accessed on 5 February 2020).
- Mahdavi, A.; Orehounig, K. Energy and Thermal Performance of Hammams; Hammam Rehabilitation Reader: Vienna, Austria, 2012. [Google Scholar]
- Geiger, A.; Cooper, J. Overview of Airborne Metals Regulations, Exposure Limits, Health Effects, and Contemporary Research; Environmental Protection Agency, Air Quality: Washington, DC, USA, 2010.
- Case, B.W.; Abraham, J.L.; Meeker, G.D.; Pooley, F.D.; Pinkerton, K.E. Applying definitions of “asbestos” to environmental and “low-dose” exposure levels and health effects, particularly malignant mesothelioma. J. Toxicol. Environ. Health Part B 2011, 14, 3–39. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Selikoff, I.J.; Lee, D.H.K. Asbestos and Disease; Academic Press: New York, NY, USA, 1978. [Google Scholar]
- Mcdonald, J. Corbett. Health implications of environmental exposure to asbestos. Environ. Health Perspect. 1985, 62, 319–328. [Google Scholar] [CrossRef] [PubMed]
- International Agency for Research on Cancer. Asbestos (Chrysotile, Amosite, Crocidolite, Tremolite, Actinolite, and Anthophyllite). Met. Arsen. Dusts Fibres Rev. Hum. Carcinog. 2012, 100, 219–309. [Google Scholar]
- Ministére Délégué chargé de l’Environnement sur l’agglomération de Rabat. Available online: http://www.environnement.gov.ma (accessed on 5 February 2020).
- European Environment Agency. Available online: https://www.eea.europa.eu/themes/air/air-quality-index (accessed on 5 February 2020).
- Lee, S.Y. Emissions from Street Vendor Cooking Devices (Charcoal Grilling). Final Report, January 1998–March 1999; ARCADIS Geraghty and Miller, Inc.: Research Triangle Park, NC, USA, 1999. [Google Scholar]
- Geoffrey, C.W. Accuracy and reliability of an automated air quality forecast system for ozone in seven Kentucky metropolitan areas. Atmos. Environ. 2007, 41, 5863–5875. [Google Scholar]
- Kumar, U.; Jain, V.K. ARIMA forecasting of ambient air pollutants (O3, NO, NO2 and CO). Stoch. Environ. Res. Risk Assess. 2010, 24, 751–760. [Google Scholar] [CrossRef]
- Hoi, K.I.; Yuen, K.V.; Mok, K.M. Kalman filter based prediction system for wintertime PM10 concentrations in Macau. Glob. NEST J. 2008, 10, 140–150. [Google Scholar]
- Rezzouqi, H.; Gryech, I.; Sbihi, N.; Ghogho, M.; Benbrahim, H. Analyzing the Accuracy of Historical Average for Urban Traffic Forecasting Using Google Maps. Proceedings of SAI Intelligent Systems Conference; Springer: Cham, Switzerland, 2018; pp. 1145–1156. [Google Scholar]
- Junninen, H.; Niska, H.; Tuppurainen, K.; Ruuskanen, J.; Kolehmainen, M. Methods for imputation of missing values in air quality data sets. Atmos. Envion. 2004, 38, 2895–2907. [Google Scholar] [CrossRef]
- Li, J.; Heap, A.D. A review of comparative studies of spatial interpolation methods in environmental sciences: Performance and impact factors. Ecol. Inform. 2011, 6, 228–241. [Google Scholar] [CrossRef]
- Vidnerová, P.; Neruda, R. Sensor Data Air Pollution Prediction by Kernel Models. (CCGrid). In Proceedings of the 2016 16th IEEE/ACM International Symposium onCluster, Cloud and Grid Computing, Cartagena, Colombia, 16–19 May 2016; pp. 666–673. [Google Scholar]
- Smola, A.J.; Schölkopf, B. A tutorial on support vector regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Pollutant | Type | Reference | Cost |
|---|---|---|---|---|
| MoreAir AQ-M | , | OPC | - | $95 |
| MoreAir AQ-N | , | OPC | - | $95 |
| Speck | nephelometer | [25] | $150 | |
| Pure Morning P3 | OPC | [24] | $170 | |
| Dylos DC1100 | OPC | [26] | $300 | |
| AIRQino | , | OPC | [27] | $1000 |
| Met one -831 | OPC | [28] | $2000 | |
| SidePak AM510 | nephelometer | [29] | $3000 | |
| AQT-420 | , , , | electrochemical & OPC | [30] | $3700 |
| AQMesh v.4.0 | CO, , NO, , , , | electrochemical & OPC | [31] | $10,000 |
| 0.84 | 3.97 | |
| 0.81 | 1.03 |
| Pollution Sources | PM10 (μg/m3) | PM2.5 (μg/m3) |
|---|---|---|
| Public Baths and Ovens | 400 | 35 |
| Open-Air Thrift Shops | 200 | 150 |
| Street Food Vendors | 100 | 70 |
| Traffic | 80 | 53 |
| PM10 | PM2.5 | |||
|---|---|---|---|---|
| RMSE | R2 | RMSE | R2 | |
| MLR | 38.86 | 0.22 | 13.92 | 0.42 |
| SVR | 14.61 | 0.39 | 9.25 | 0.47 |
| Random Forest | 13.63 | 0.57 | 7.76 | 0.63 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gryech, I.; Ben-Aboud, Y.; Guermah, B.; Sbihi, N.; Ghogho, M.; Kobbane, A. MoreAir: A Low-Cost Urban Air Pollution Monitoring System. Sensors 2020, 20, 998. https://doi.org/10.3390/s20040998
Gryech I, Ben-Aboud Y, Guermah B, Sbihi N, Ghogho M, Kobbane A. MoreAir: A Low-Cost Urban Air Pollution Monitoring System. Sensors. 2020; 20(4):998. https://doi.org/10.3390/s20040998
Chicago/Turabian StyleGryech, Ihsane, Yassine Ben-Aboud, Bassma Guermah, Nada Sbihi, Mounir Ghogho, and Abdellatif Kobbane. 2020. "MoreAir: A Low-Cost Urban Air Pollution Monitoring System" Sensors 20, no. 4: 998. https://doi.org/10.3390/s20040998
APA StyleGryech, I., Ben-Aboud, Y., Guermah, B., Sbihi, N., Ghogho, M., & Kobbane, A. (2020). MoreAir: A Low-Cost Urban Air Pollution Monitoring System. Sensors, 20(4), 998. https://doi.org/10.3390/s20040998