Enhanced Algorithm for the Detection of Preimpact Fall for Wearable Airbags


Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
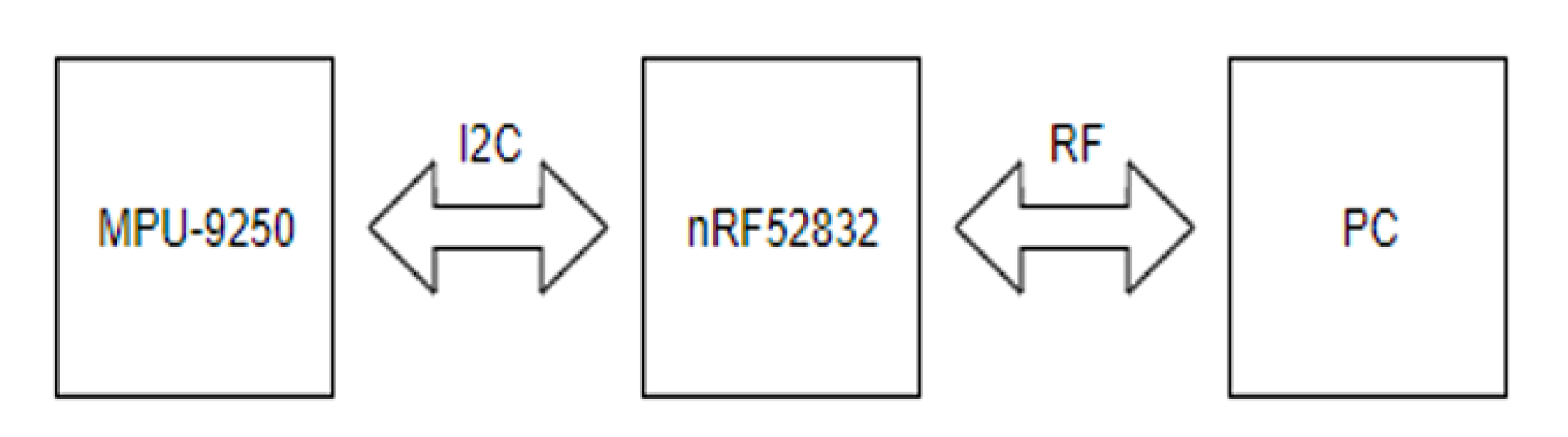
2.2. Equipment
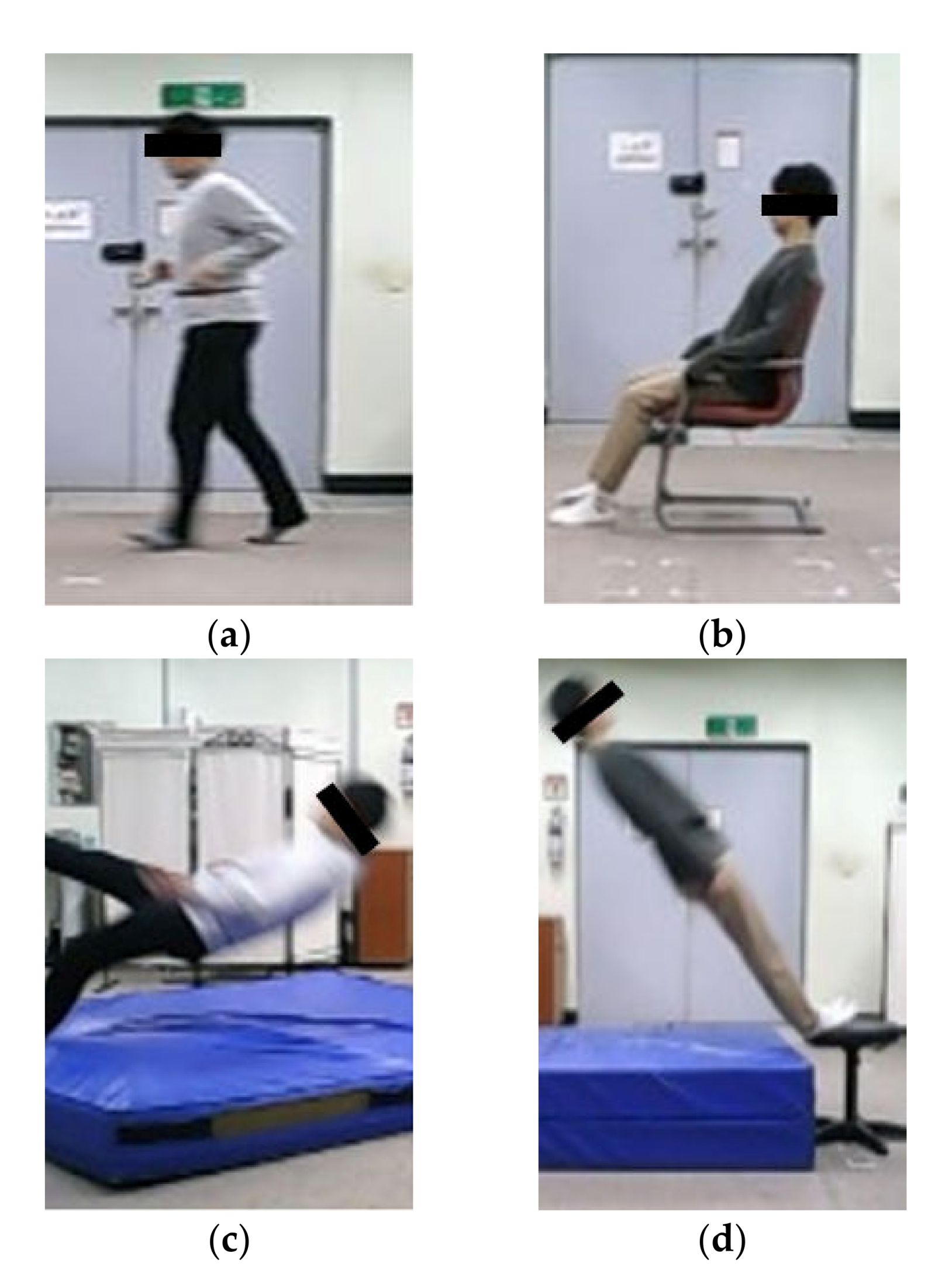
2.3. Experimental Procedures
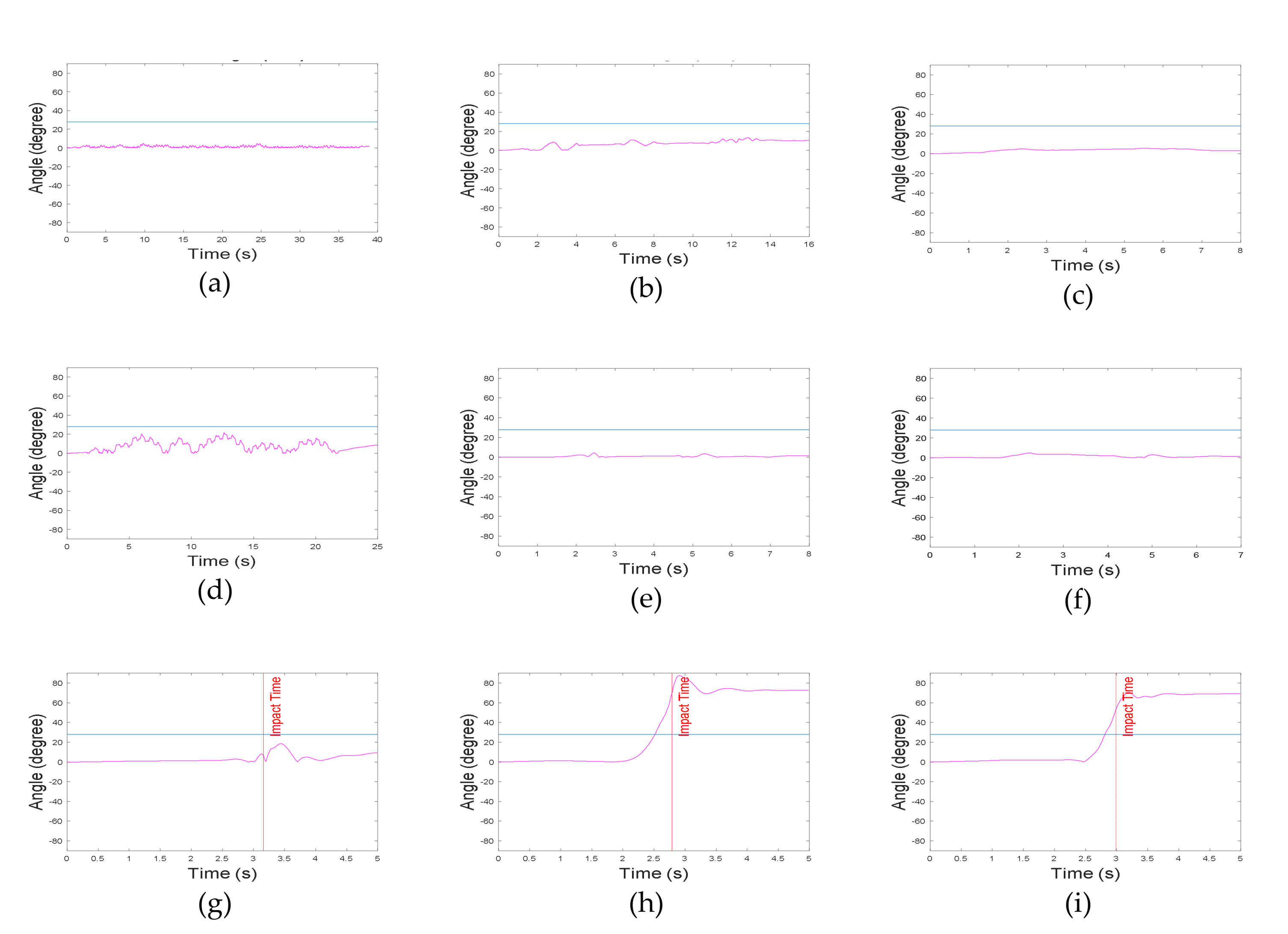
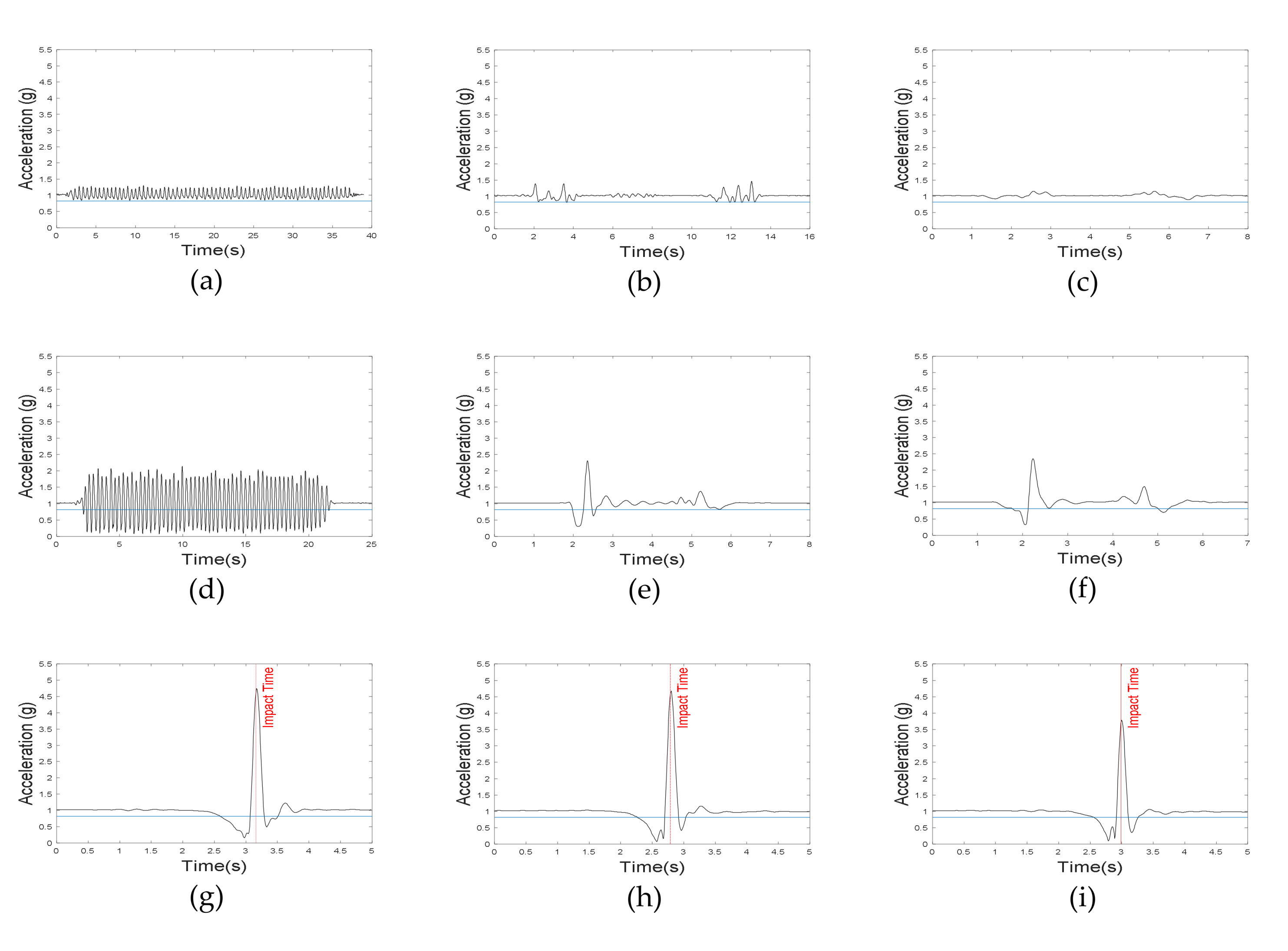
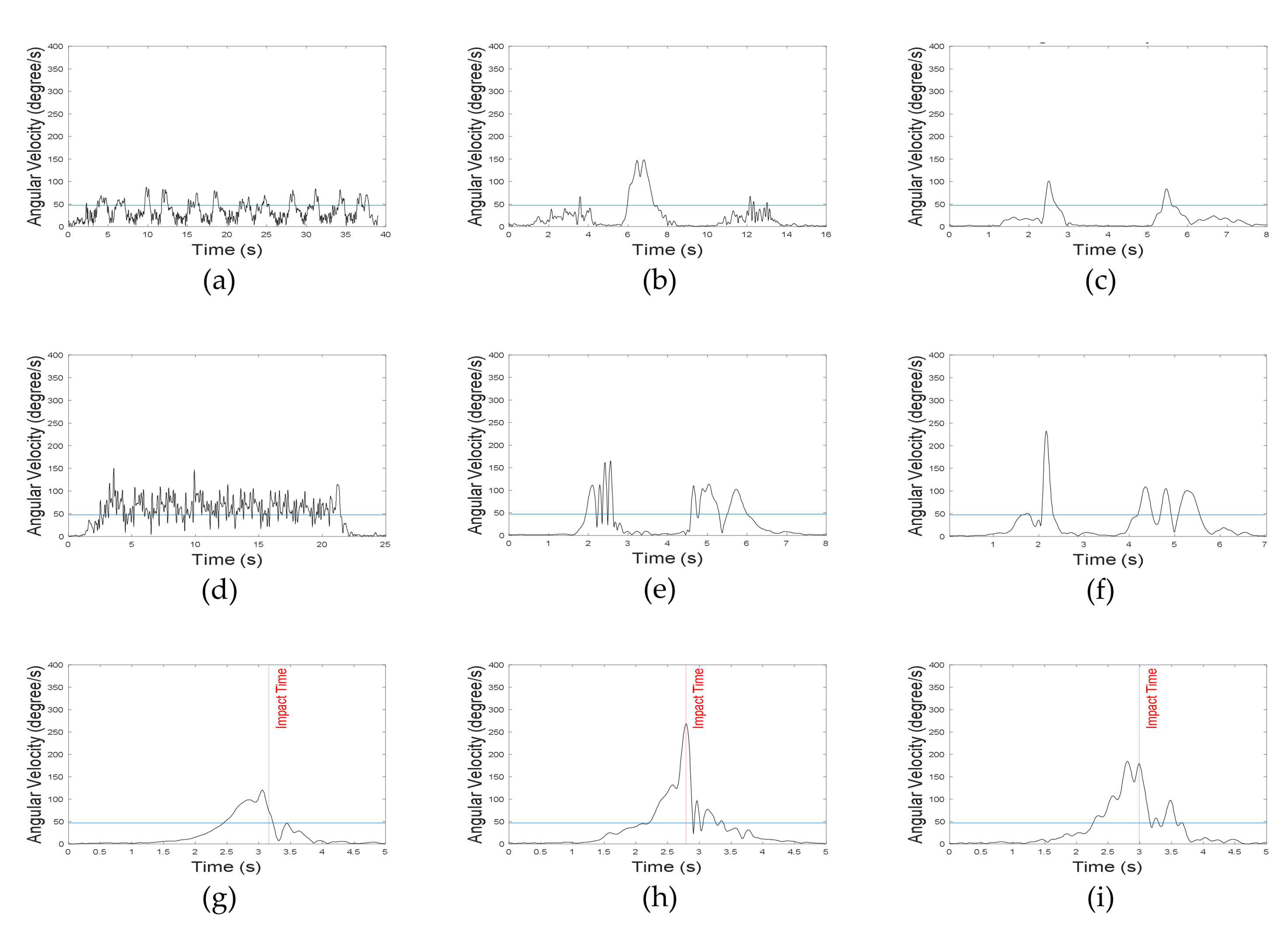
2.4. Data Analysis
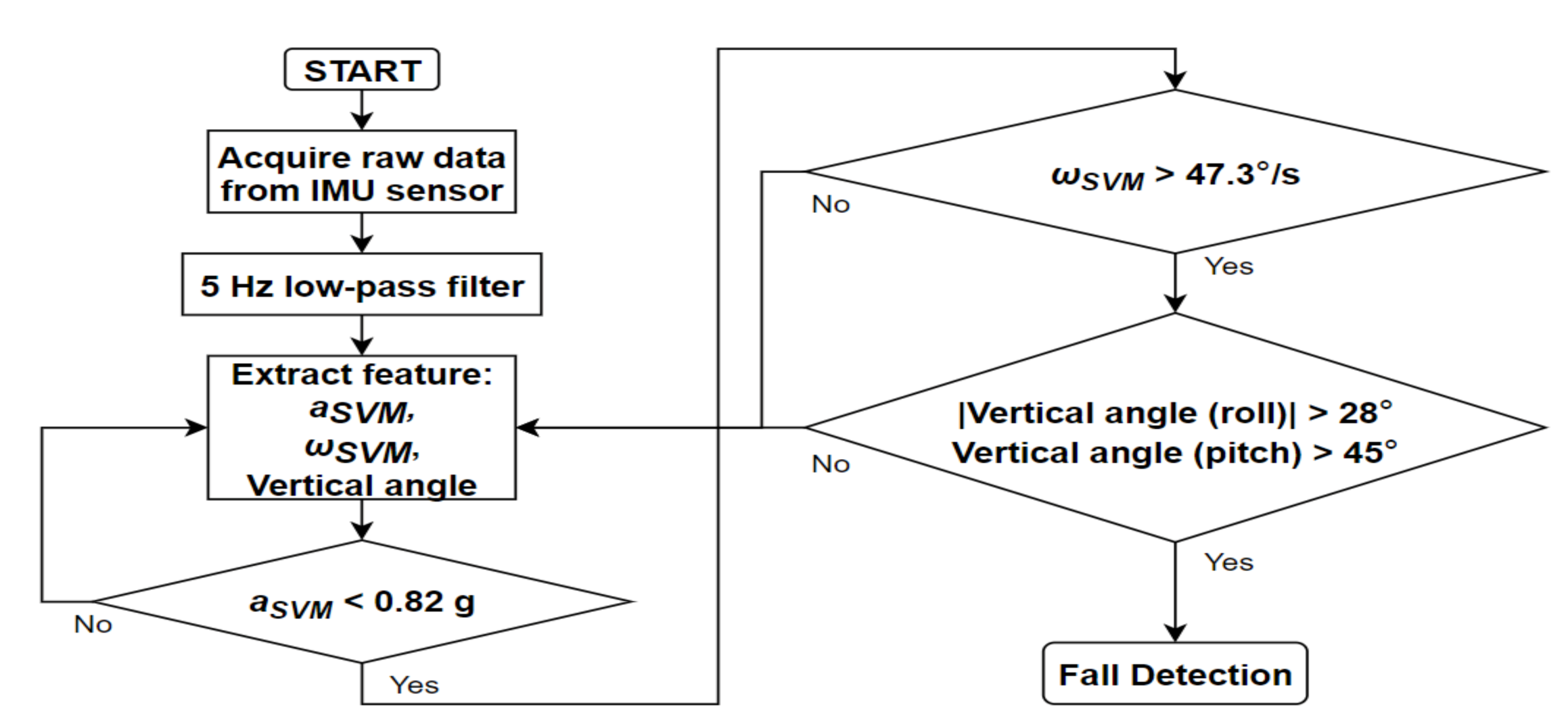
2.5. Preimpact Fall Detection Algorithm
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- World Health Organization (WHO). WHO Global Report on Falls Prevention in Older Age 2007. Available online: https://extranet.who.int/agefriendlyworld/wp-content/uploads/2014/06/WHo-Global-report-on-falls-prevention-in-older-age.pdf (accessed on 30 December 2019).
- Verschueren, S.M.; Bogaerts, A.; Delecluse, C.; Claessens, A.L.; Haentjens, P.; Vanderschueren, D.; Boonen, S. The effects of whole-body vibration training and vitamin D supplementation on muscle strength, muscle mass, and bone density in institutionalized elderly women: A 6-month randomized, controlled trial. J. Bone Miner. Res. 2011, 26, 42–49. [Google Scholar] [CrossRef]
- Softic, A.; Beganlic, A.; Pranjic, N.; Sulejmanovic, S. The influence of the use of benzodiazepines in the frequency falls in the elderly. Med. Arch. 2013, 67, 252–255. [Google Scholar] [CrossRef]
- Hagen, G.; Magnussen, J.; Tell, G.; Omsland, T. Estimating the future burden of hip fractures in Norway. A NOREPOS study. Bone 2020, 131, 115156. [Google Scholar] [CrossRef] [PubMed]
- Florence, C.S.; Bergen, G.; Atherly, A.; Burns, E.; Stevens, J.; Drake, C. Medical costs of fatal and nonfatal falls in older adults. J. Am. Geriatr. Soc. 2018, 66, 693–698. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lord, S.R.; Tiedemann, A.; Chapman, K.; Munro, B.; Murray, S.M.; Gerontology, M.; Ther, G.R.; Sherrington, C. The effect of an individualized fall prevention program on fall risk and falls in older people: A randomized, controlled trial. J. Am. Geriatr. Soc. 2005, 53, 1296–1304. [Google Scholar] [CrossRef]
- Røyset, B.; Talseth-Palmer, B.A.; Lydersen, S.; Farup, P.G. Effects of a fall prevention program in elderly: A pragmatic observational study in two orthopedic departments. Clin. Interv. Aging 2019, 14, 145–154. [Google Scholar] [CrossRef] [Green Version]
- Parker, M.J.; Gillespie, W.J.; Gillespie, L.D. Effectiveness of hip protectors for preventing hip fractures in elderly people: Systematic review. BMJ 2006, 332, 571–574. [Google Scholar] [CrossRef] [Green Version]
- Derler, S.; Spierings, A.B.; Schmitt, K.U. Anatomical hip model for the mechanical testing of hip protectors. Med. Eng. Phys. 2005, 27, 475–485. [Google Scholar] [CrossRef]
- Thanh, P.V.; Tran, C.T.; Nguyen, D.C.; Anh, N.D.; Dinh, D.N.; El-Rabaie, S.; Sandrasegara, K. Development of a real-time, simple and high-accuracy fall detection system for elderly using 3-DOF accelerometers. Arab. J. Sci. Eng. 2019, 44, 3329–3342. [Google Scholar] [CrossRef] [Green Version]
- Zhong, Z.; Chen, F.; Zhai, Q.; Fu, Z.; Ferreira, J.P.; Liu, Y.; Yi, J. A real-time pre-impact fall detection and protection system. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 1039–1044. [Google Scholar]
- Ahn, S.J.; Choi, D.G.; Kim, J.M.; Kim, S.J.; Jeong, Y.J.; Jo, M.; Kim, Y.H. Optimization of a pre-impact fall detection algorithm and development of hip protection airbag system. Sensors Mater. 2018, 30, 1743–1752. [Google Scholar] [CrossRef]
- Jeong, Y.J.; Ahn, S.J.; Kim, J.M.; Kim, S.J.; Koo, B.M.; Ryu, J.S.; Kim, Y.H. Impact attenuation of the soft pads and the wearable airbag for the hip protection in the elderly. Int. J. Precis. Eng. Manuf. 2019, 20, 273–283. [Google Scholar] [CrossRef]
- Rougier, C.; Meunier, J.; St-Arnaud, A.; Rousseau, J. 3D head tracking for fall detection using a single calibrated camera. Image Vision Comput. 2013, 31, 246–254. [Google Scholar] [CrossRef]
- Bian, Z.P.; Hou, J.; Chau, L.P.; Nadia, M.T. Fall detection based on body part tracking using a depth camera. IEEE J Biomed. Health 2015, 19, 430–439. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Chen, L.; Zhou, Z.; Sun, X.; Dong, J. Human fall detection in surveillance video based on PCANet. Multimed. Tools Appl. 2016, 75, 11603–11613. [Google Scholar] [CrossRef]
- Li, M.; Xu, G.; He, B.; Ma, X.; Xie, J. Pre-impact fall detection based on a modified zero moment point criterion using data from Kinect sensors. IEEE Sens. J. 2018, 18, 5522–5531. [Google Scholar] [CrossRef]
- Rescio, R.; Leone, A.; Siciliano, P. Supervise machine learning scheme for electromyography-based pre-fall detection system. Expert Syst. Appl. 2018, 100, 95–105. [Google Scholar] [CrossRef]
- Yoo, S.G.; Oh, D.I. An artificial neural network-based fall detection. Int. J. Eng. Bus. Manag. 2018, 10, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Aziz, O.; Musngi, M.; Park, E.J.; Mori, G.; Robinovitch, S.N. A comparison of accuracy of fall detection algorithms (threshold based vs. machine learning) using waist-mounted tri-axial accelerometer signals from a comprehensive set of falls and non-fall trials. Med. Biol. Eng. Comput. 2017, 55, 45–55. [Google Scholar] [CrossRef]
- Nyan, M.N.; Tay, F.E.H.; Murugasu, E. A wearable system for pre-impact fall detection. J. Biomech. 2008, 41, 3475–3481. [Google Scholar] [CrossRef]
- Wang, F.T.; Chan, H.L.; Hsu, M.H.; Lin, C.K.; Chao, P.K.; Chang, Y.J. Threshold-based fall detection using a hybrid of tri-axial accelerometer and gyroscope. Physiol. Meas. 2018, 39, 10. [Google Scholar] [CrossRef]
- Ahn, S.J.; Kim, J.M.; Koo, B.M.; Kim, Y.H. Evaluation of inertial sensor-based pre-impact fall detection algorithms using public dataset. Sensors 2019, 19, 774. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. SisFall: A fall and movement dataset. Sensors 2017, 19, 198. [Google Scholar] [CrossRef]
- InvenSense, MPU-9250 Nine-Axis MEMS Motion Tracking Device. Available online: https://www.invensense.com/products/motion-tracking/9-axis/mpu-9250/ (accessed on 13 February 2020).
- Kromemwett, N.; Ruppelt, J.; Trommer, G.F. Motion monitoring based on a finite state machine for precise indoor localization. Gyroscopy Navig. 2017, 8, 190–199. [Google Scholar] [CrossRef]
- Fang, B.; Sun, F.; Liu, H.; Liu, C. 3D human gesture capturing and recognition by the IMMU-based data glove. Neurocomputing 2018, 277, 198–207. [Google Scholar] [CrossRef]
- Eduardo, C.; Jose, A.S.-R.; Jose, M.C.-G. UMAFall: A multisensor dataset for research on automatic fall detection. Procedia Comput. Sci. 2017, 110, 32–39. [Google Scholar]
- Kim, S.P. Complementary filter. In Kalman Filter Is Not Difficult with MATLAB Examples; Hanbit Academy Inc.: Seoul, Korea, 2019; pp. 226–245. [Google Scholar]
- Bourke, A.K.; O’Donovan, K.J.; Olaighin, G. The identification of vertical velocity profiles using an inertial sensor to investigate pre-impact detection of falls. Med. Eng. Phys. 2008, 30, 937–946. [Google Scholar] [CrossRef]
- Wu, G.; Xue, S. Portable preimpact fall detector with inertial sensors. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 178–183. [Google Scholar]
- Tamura, T.; Yoshimura, T.; Sekine, M.; Uchida, M.; Tanaka, O. A wearable airbag to prevent fall injuries. IEEE Trans. Inf. Technol. Biomed. 2009, 13, 910–914. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activities | ||
|---|---|---|
| ADLs | 1. Walking | 8. Climbing up and down the stairs |
| 2. Jogging * | 9. Slowly sitting on the stool and getting up | |
| 3. Squatting | 10. Quickly sitting on the chair and getting up * | |
| 4. Waist bending | 11. Trying to get up but collapsing into the chair * | |
| 5. Lying down | 12. Stumbling while walking * | |
| 6. Running in place * | 13. Slowly sitting on low-height mattress and getting up | |
| 7. Jumping * | 14. Quickly sitting on low-height mattress and getting up * | |
| Falls | 1. Slip-backward fall | 4. Backward fall |
| 2. Sit down-backward fall | 5. Lateral fall | |
| 3. Sit-backward fall | 6. Twist fall (Back → Side) | |
| ADLs | Number of FPs | ADLs | Number of FPs |
|---|---|---|---|
| Walking | 0/30 | Stumbling while walking | 0/90 |
| Jogging | 9/30 | Climbing up and down the stairs | 0/90 |
| Squatting | 0/90 | Slowly sitting on the stool and getting up | 0/90 |
| Waist bending | 0/90 | Quickly sitting on the chair and getting up | 6/90 |
| Running in place | 1/90 | Trying to get up but collapsing into the chair | 4/90 |
| Jumping | 0/90 | Slowly sitting on low-height mattress and getting up | 0/90 |
| Lying | 1/90 | Quickly sitting on low-height mattress and getting up | 7/90 |
| Type of Falls | Lead Time (ms) | Type of Falls | Lead Time (ms) |
|---|---|---|---|
| Slip-backward fall | 292 ± 10.61 | Backward fall | 333 ± 9.71 |
| Sit down-backward fall | 151 ± 5.37 | Lateral fall | 335 ± 8.26 |
| Sit-backward fall | 296 ± 5.38 | Twist fall (Back → Side) | 274 ± 8.28 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, H.; Koo, B.; Kim, J.; Kim, T.; Nam, Y.; Kim, Y. Enhanced Algorithm for the Detection of Preimpact Fall for Wearable Airbags. Sensors 2020, 20, 1277. https://doi.org/10.3390/s20051277
Jung H, Koo B, Kim J, Kim T, Nam Y, Kim Y. Enhanced Algorithm for the Detection of Preimpact Fall for Wearable Airbags. Sensors. 2020; 20(5):1277. https://doi.org/10.3390/s20051277
Chicago/Turabian StyleJung, Haneul, Bummo Koo, Jongman Kim, Taehee Kim, Yejin Nam, and Youngho Kim. 2020. "Enhanced Algorithm for the Detection of Preimpact Fall for Wearable Airbags" Sensors 20, no. 5: 1277. https://doi.org/10.3390/s20051277
APA StyleJung, H., Koo, B., Kim, J., Kim, T., Nam, Y., & Kim, Y. (2020). Enhanced Algorithm for the Detection of Preimpact Fall for Wearable Airbags. Sensors, 20(5), 1277. https://doi.org/10.3390/s20051277