Matched Field Processing Based on Bayesian Estimation

Abstract
:1. Introduction
2. Robust MFP in the Uncertain Environment
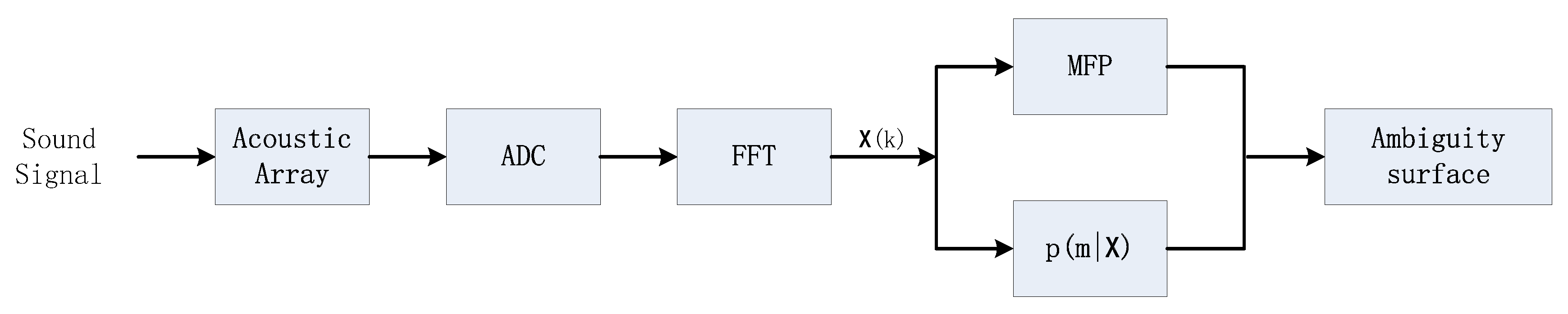
2.1. Data Model
2.2. MVDR
2.3. MFP-CPC
3. Simulation and Analysis
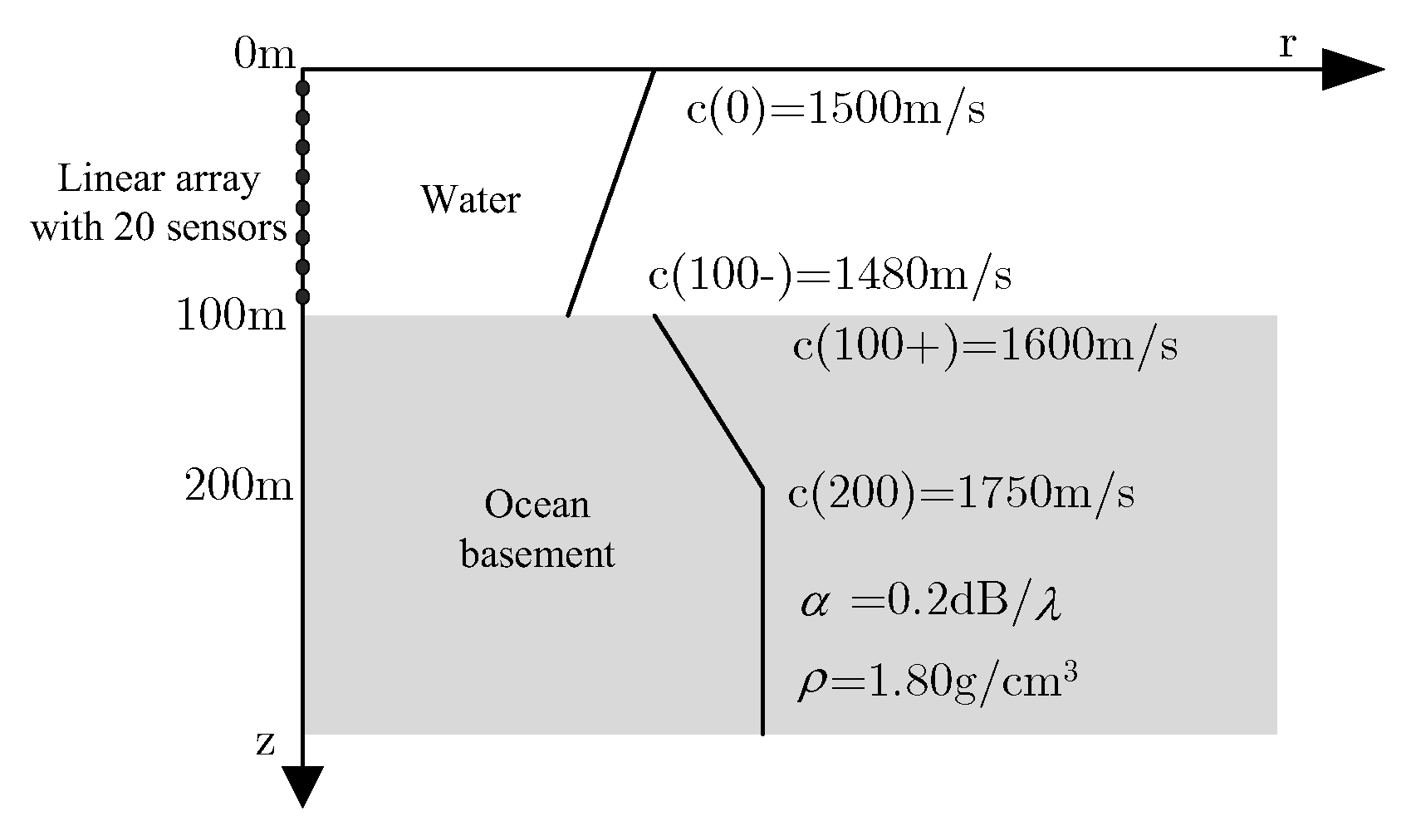
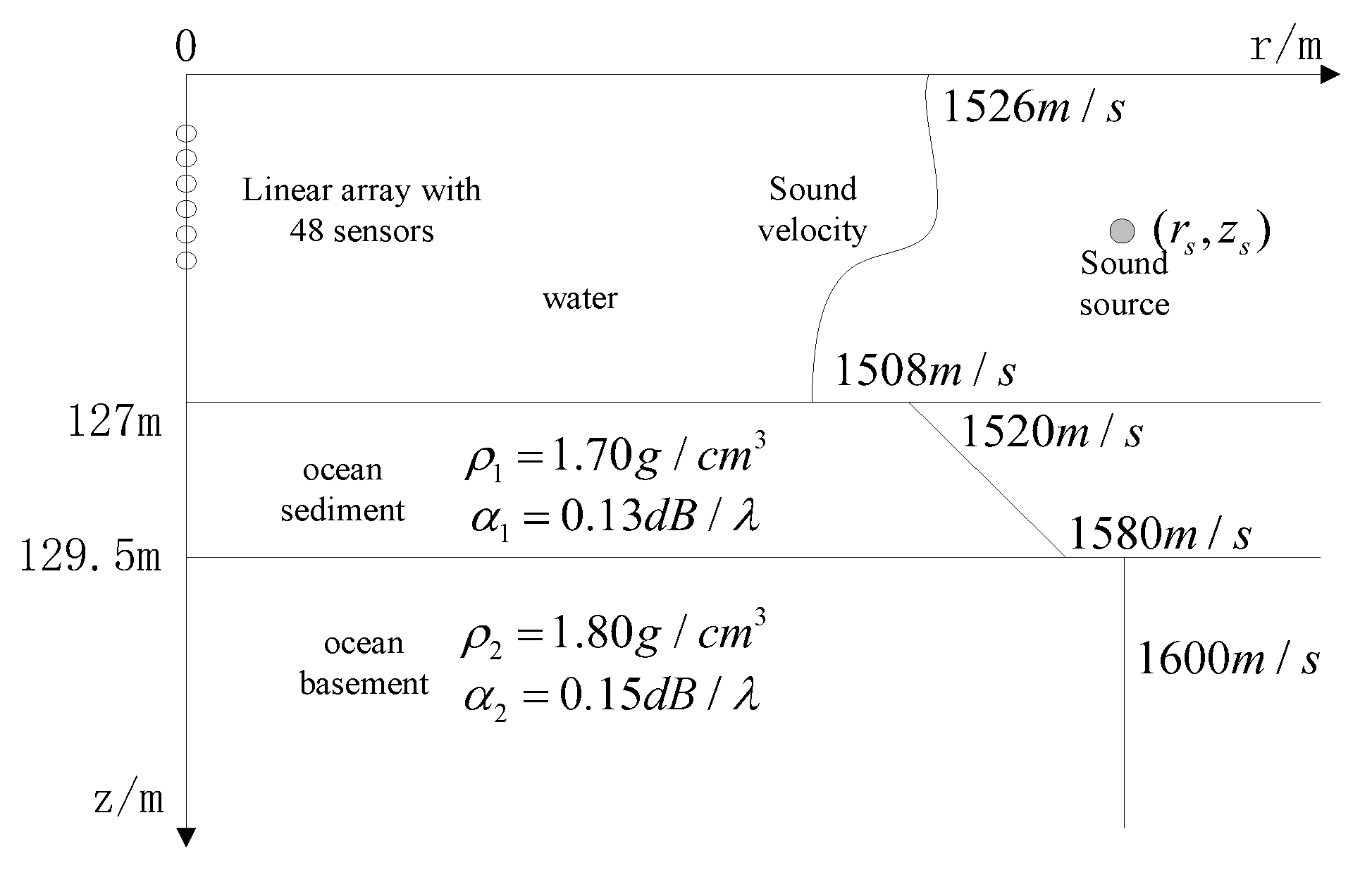
3.1. Simulation Model
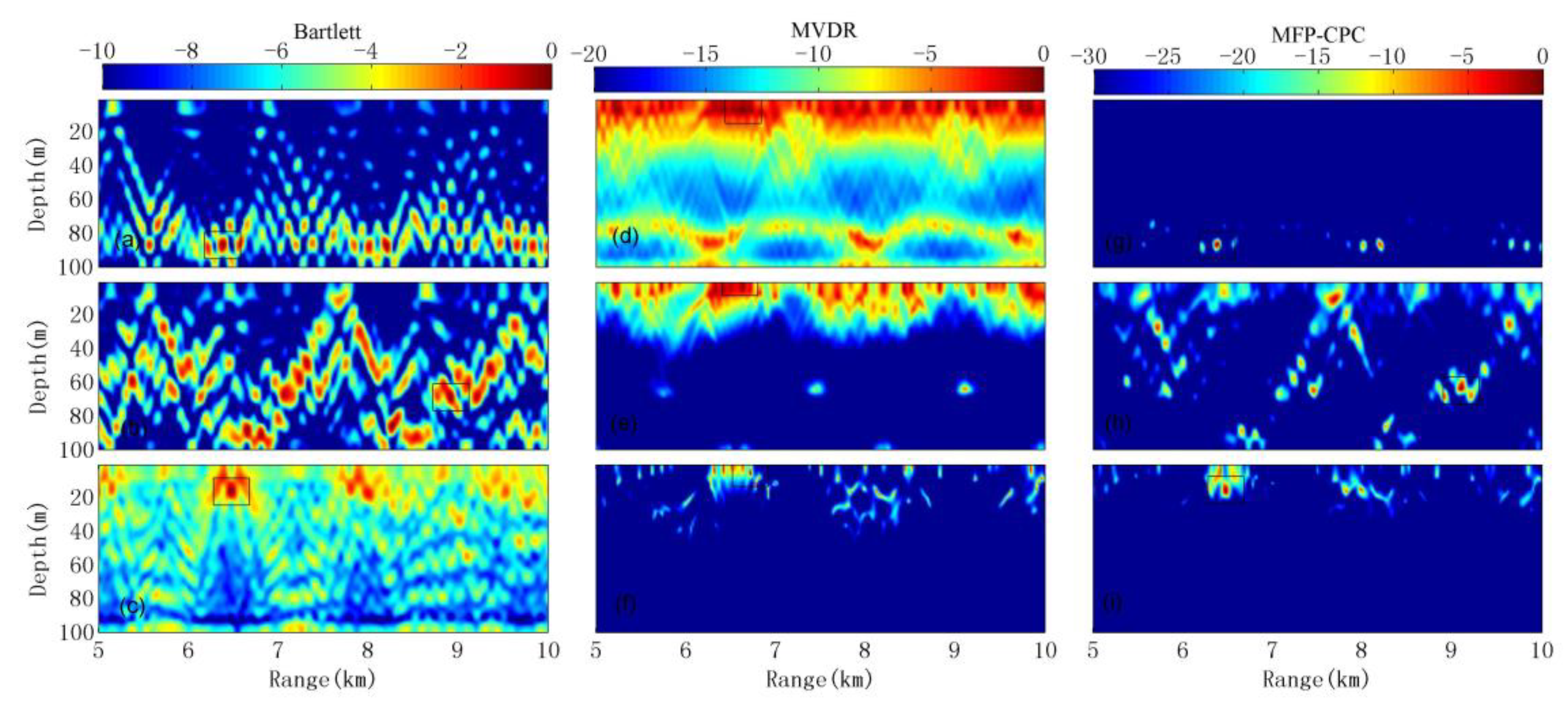
3.2. Simulation Result without Environment Mismatch
3.3. Simulation Result with Environment Mismatch
4. Verification by Ocean Experimental Data
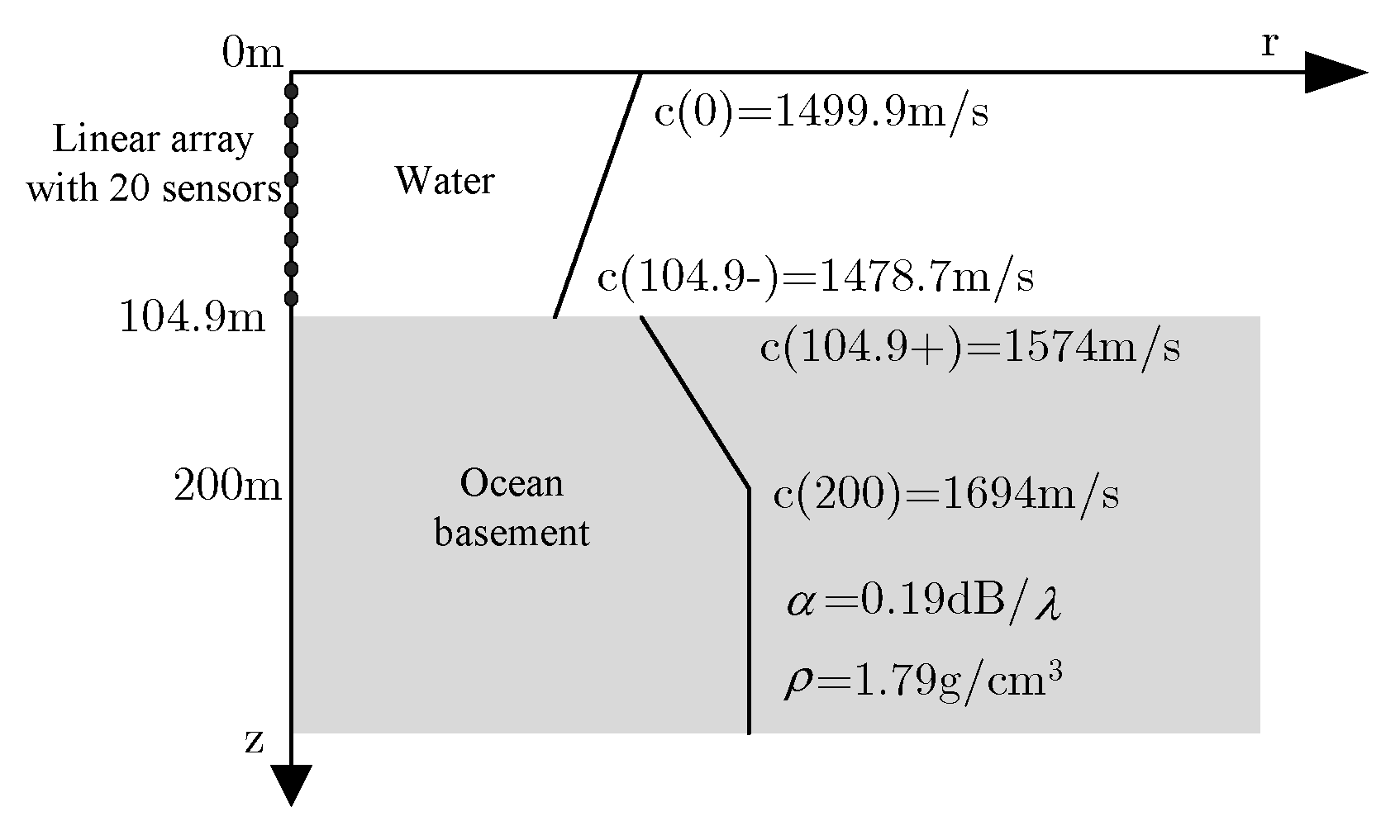
4.1. Experiment Parameter
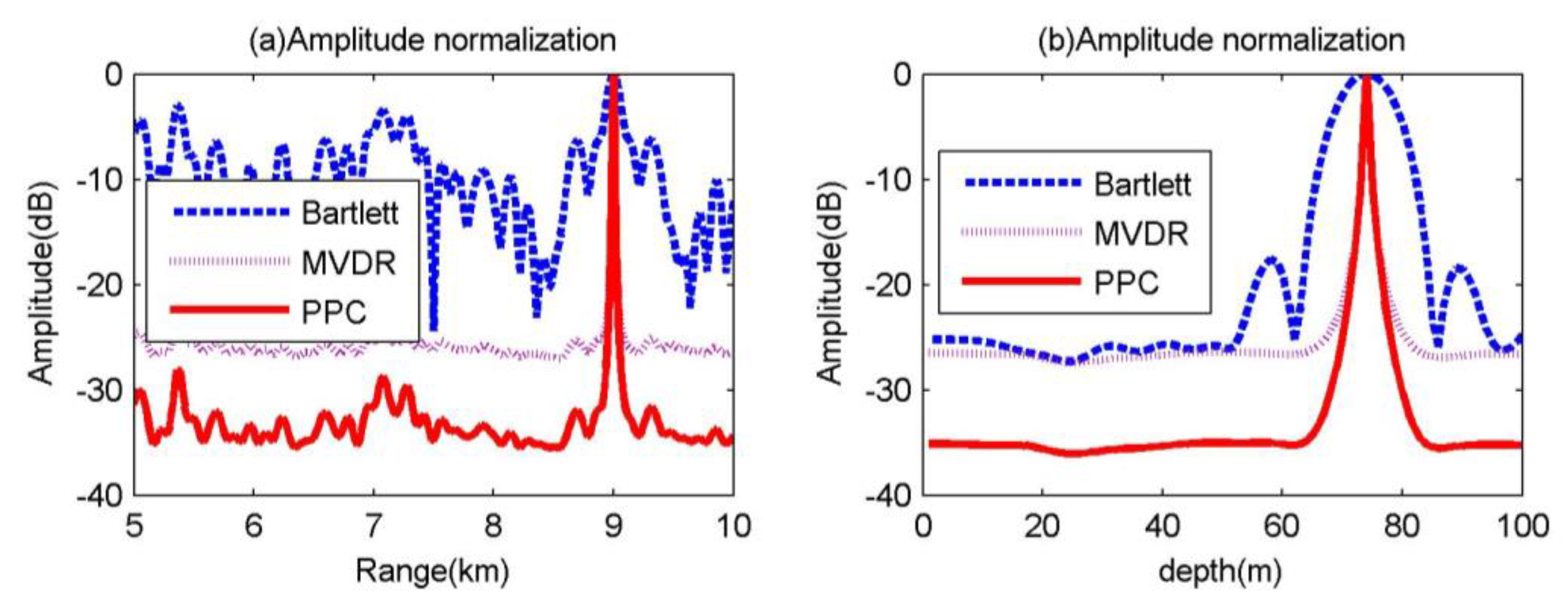
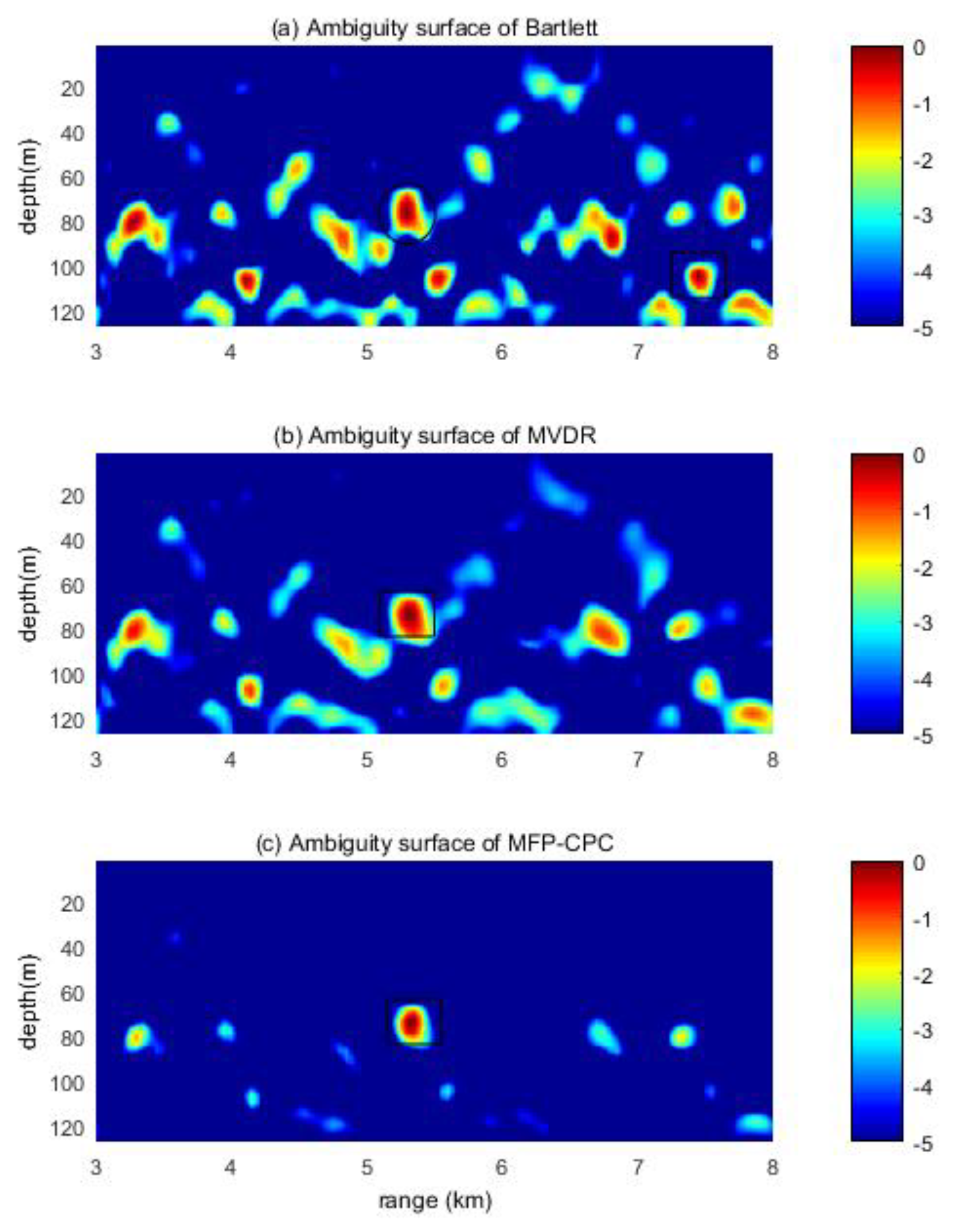
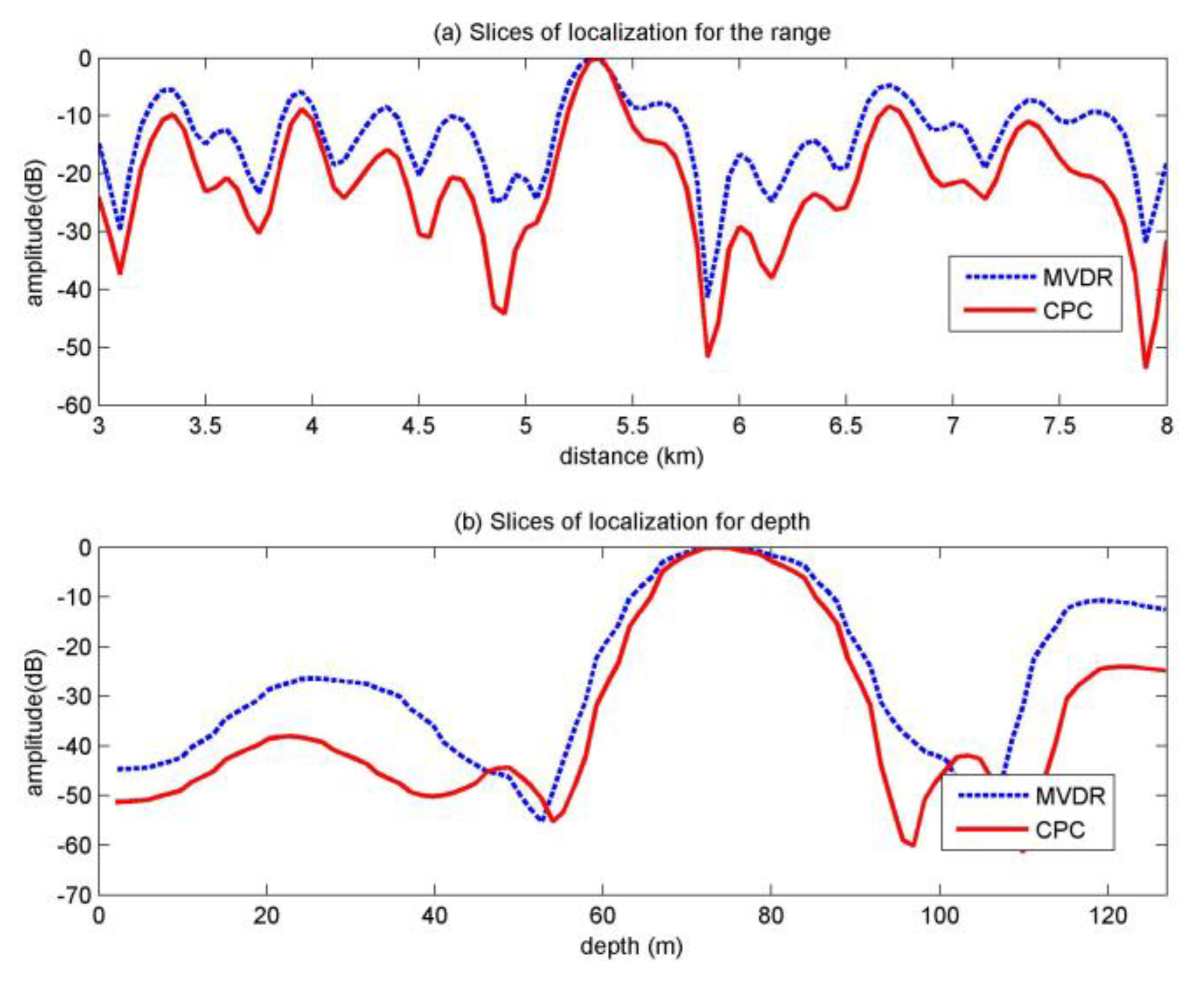
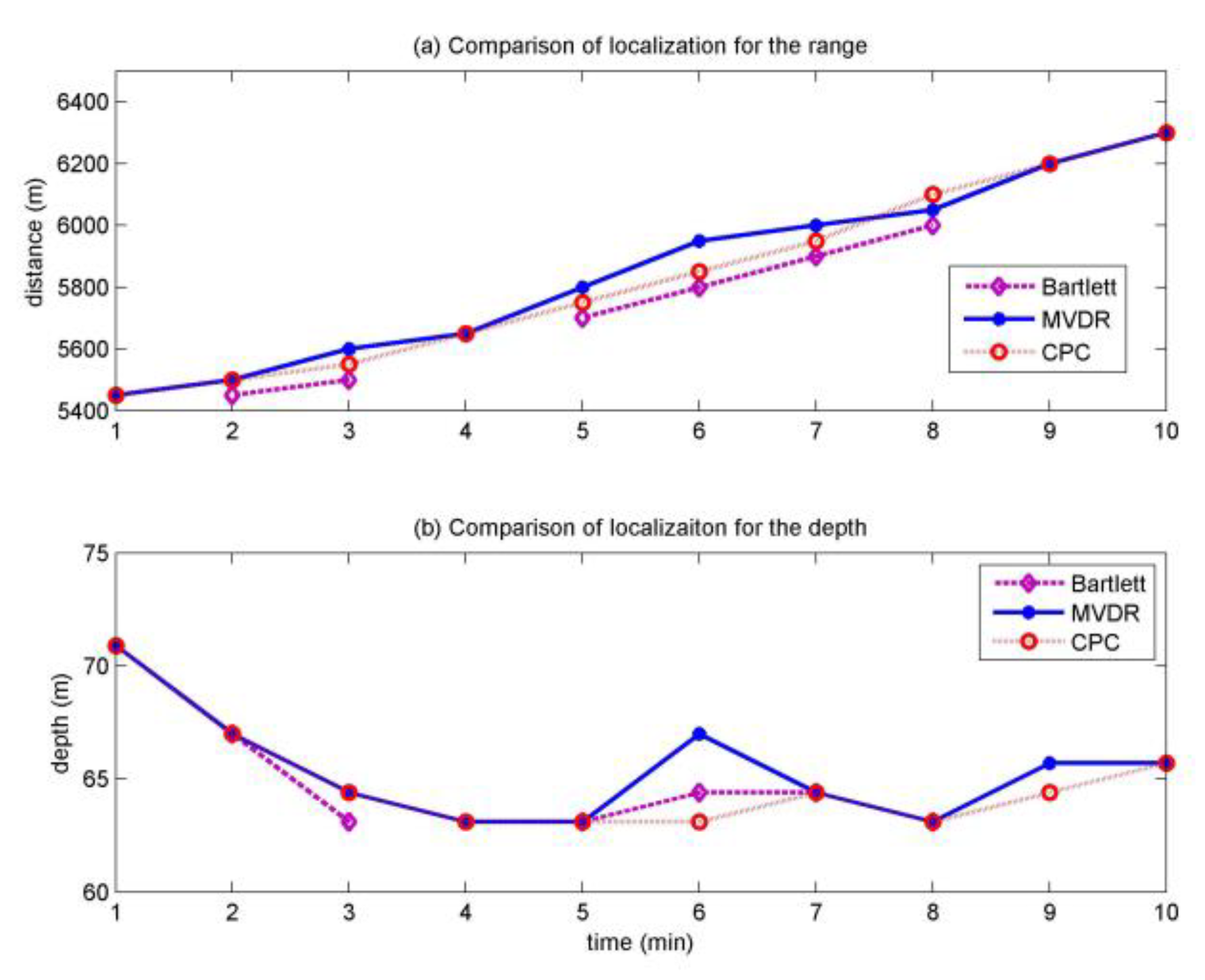
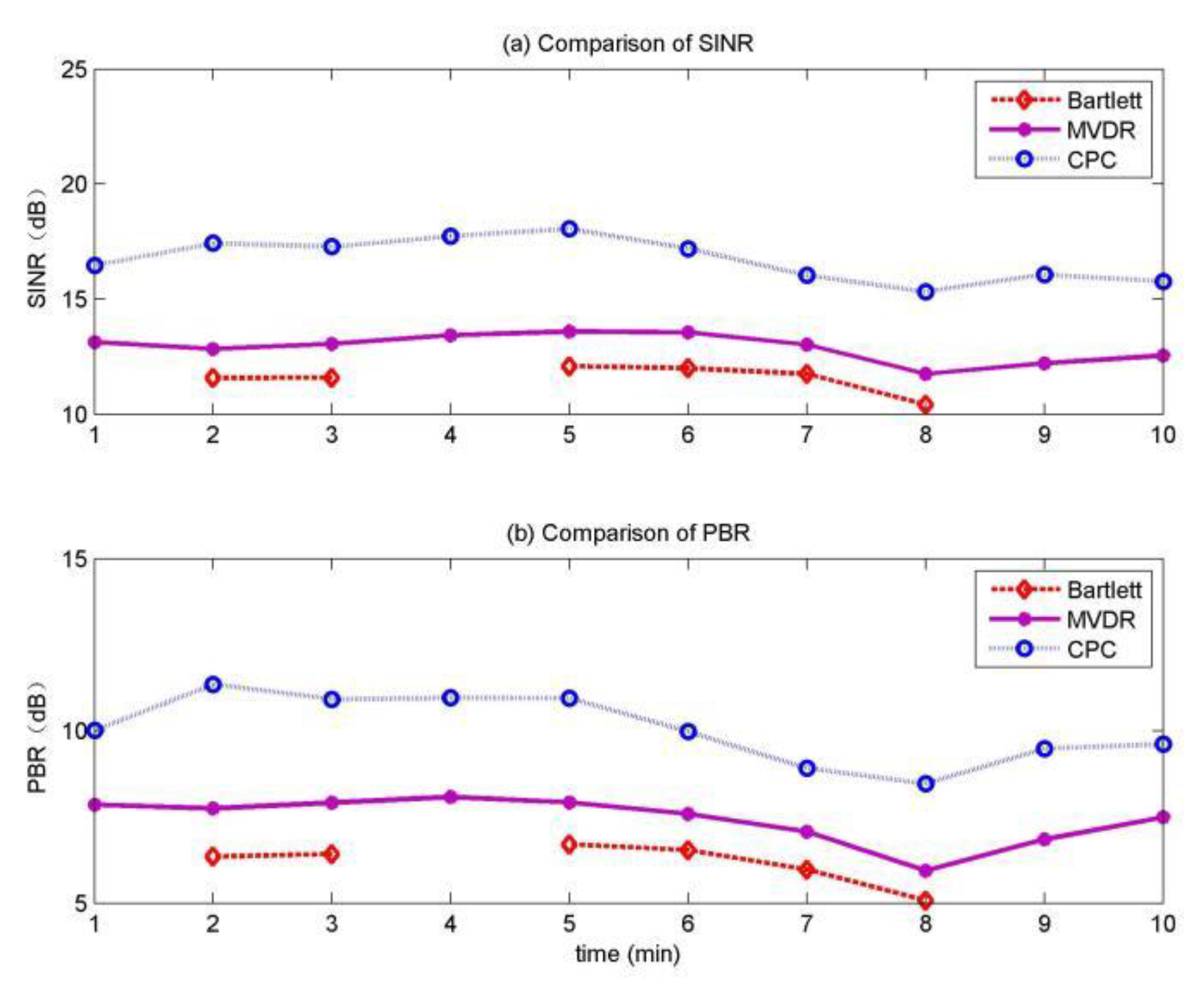
4.2. Result of Experimental Data
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Herrera-Viedma, E.; López-Herrera, A.G. A review on information accessing systems based on fuzzy linguistic modeling. Int. J. Comput. Intell. Syst. 2010, 3, 420–437. [Google Scholar] [CrossRef]
- Gemba, K.L.; Hodgkiss, W.S.; Gerstoft, P. Adaptive and compressive matched field processing. J. Acoust. Soc. Am. 2017, 141, 92–103. [Google Scholar] [CrossRef] [PubMed]
- Sarma, K.K. Neural network based feature extraction for Assamese character and numeral recognition. Int. J. Artif. Intell. 2009, 2, 37–56. [Google Scholar]
- Pozna, C.; Precup, R.E.; Tar, J.K. New results in modelling derived from Bayesian filtering. Knowl. Based Syst. 2010, 23, 182–194. [Google Scholar] [CrossRef]
- Ciuonzo, D. On time-reversal imaging by statistical testing. IEEE Signal Process. Lett. 2017, 24, 1024–1028. [Google Scholar] [CrossRef] [Green Version]
- Porter, M.B. The Kraken Normal Mode Program; Technical Report No. NRL/MR/5120-92-6920; Naval Research Laboratory: Washington, DC, USA, 1992. [Google Scholar]
- Baggeroer, A.B.; Kuperman, W.A.; Mikhalevsky, P.N. An overview of matched field methods in ocean acoustics. IEEE J. Ocean. Eng. 1993, 18, 401–424. [Google Scholar] [CrossRef]
- You, W.; He, Z.S.; Hu, J.F. Skywave radar altitude estimation algorithm based on matched-field processing. J. Electron. Inf. Technol. 2013, 35, 401–405. [Google Scholar] [CrossRef]
- Mantzel, W.; Romberg, J.; Sabra, K. Compressive matched-field processing. J. Acoust. Soc. Am. 2012, 132, 90–102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shorey, J.A.; Nolte, L.W.; Krolik, J.L. Computationally efficient Monte Carlo estimation algorithms for matched field processing in uncertain ocean environments. J. Comput. Acoust. 1994, 2, 285–314. [Google Scholar] [CrossRef]
- Singh, V.; Knisely, K.E.; Yönak, S.H.; Grosh, K.; Dowling, D.R. Non-line-of-sight sound source localization using matched-field processing. J. Acoust. Soc. Am. 2012, 131, 292–302. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Wang, Y.M.; Zhu, G.L. Matched field processing based on least squares with a small aperture hydrophone array. Sensors 2017, 17, 71. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, Z.; Xu, W.; G, X.Y. Robust matched field processing for source localization using convex optimization. In Proceedings of the OCEANS ‘09 IEEE Bremen: Balancing Technology with Future Needs, Bremen, Germany, 11–14 May 2009; pp. 1–5. [Google Scholar]
- Wang, Q.; Wang, Y.M. Robust matched field processing via second order cone optimization. In Proceedings of the 2018 IEEE International Conference on Signal Processing, Communications and Computing, ICSPCC, Qingdao, China, 14–17 September 2018. [Google Scholar]
- Chen, T.Y.; Liu, C.S.; Zakharov, Y.V. Source localization using matched-phase matched-field processing with phase descent search. IEEE J. Ocean. Eng. 2012, 37, 261–270. [Google Scholar] [CrossRef]
- Schmidt, H.; Baggeroer, A.B.; Kuperman, W.A.; Scheer, E.K. Environmentally tolerant beamforming for high-resolution matched field processing: deterministic mismatch. J. Acoust. Soc. Am. 1990, 88, 1851–1862. [Google Scholar] [CrossRef]
- Chandler, H.A.; Feuillade, C.; Smith, G.B. Sector-focused processing for stabilized resolution of multiple acoustic sources. J. Acoust. Soc. Am. 1995, 97, 2159–2172. [Google Scholar] [CrossRef]
- Deters, J.K.; Rybarczyk, Y. Hidden Markov model approach for the assessment of tele-rehabilitation exercises. Int. J. Artif. Intell. 2018, 16, 1–19. [Google Scholar]
- Porter, M.B.; Tolstoy, A. The matched field processing benchmark problems. J. Comput. Acoust. 1994, 2, 161–185. [Google Scholar] [CrossRef]
- Liu, F.X.; Pan, X.; Gong, X.Y. Matched-field three-dimensional source localization using spiral line array. J. Zhejiang Univ. Eng. Sci. 2013, 47, 62–69. (In Chinese) [Google Scholar]
- Yang, K.; Zhang, T.; Ma, Y. Matched-field processing using time-reversal concept in a range-dependent environment. J. Acoust. Soc. Am. 2012, 131, 3239. [Google Scholar] [CrossRef]
- Krolik, J.L. Matched-field minimum variance beamforming in a random ocean channel. J. Acoust. Soc. Am. 1992, 92, 1408–1419. [Google Scholar] [CrossRef]
- Lee, N.; Zurk, L.M.; Ward, J. Evaluation of reduced-rank, adaptive matched field processing algorithms for passive sonar detection in a shallow-water environment. In Proceedings of the Conference Record of the Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 24–27 October 1999; Volume 2, pp. 876–880. [Google Scholar]
- Bretthorst, G.L. The maximum entropy method of moments and Bayesian probability theory. In Proceedings of the 32nd International Workshop on Bayesian Inference and Maximum Entropy Methods in Science and Engineering, Garching, Germany, 15–20 July 2012; pp. 3–15. [Google Scholar]
- Poor, H.V. An Introduction to Signal Detection and Estimation (Springer Texts in Electrical Engineering), 2nd ed.; Springer: Berlin, Germany, 1998. [Google Scholar]
- Kay, S.M. Volume I: Estimation Theory (v. 1). In Fundamentals of Statistical Signal Processing, 1st ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Ocean Acoustics Library—OALIB. Available online: https://oalib-acoustics.org/ (accessed on 1 January 2020).
- Krolik, J.L. Robust matched-field beamforming with benchmark shallow-water acoustic array data. In Proceedings of the ICASSP-96, Atlanta, GA, USA, 7–10 May 1996; Volume 2, pp. 1185–1188. [Google Scholar]
- Ciuonzo, D.; De Maio, A.; Orlando, D. On the statistical invariance for adaptive radar detection in partially homogeneous disturbance plus structured interference. IEEE Trans. Signal Process. 2016, 65, 1222–1234. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| frequency of sound source | |
| distance | |
| depth | |
| sound propagation channel parameter set | |
| sound pressure vector | |
| amplitude of the complex signal | |
| noise vector | |
| channel transmission function | |
| wave number | |
| Normal mode function | |
| output of the MFP | |
| sampling covariance matrix | |
| weight vector | |
| the PDF of the sound source location | |
| the PDF of the measurement field | |
| conditional probability density | |
| posterior probability density function |
| Processor | Location Results | |||
|---|---|---|---|---|
| z (m) | r (m) | SINR (dB) | PBR (dB) | |
| Bartlett | 76.1 | 5300 | 10.70 | 5.41 |
| MVDR | 74.8 | 5300 | 11.57 | 6.49 |
| MFP-CPC | 74.8 | 5350 | 14.32 | 9.16 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, G.; Wang, Y.; Wang, Q. Matched Field Processing Based on Bayesian Estimation. Sensors 2020, 20, 1374. https://doi.org/10.3390/s20051374
Zhu G, Wang Y, Wang Q. Matched Field Processing Based on Bayesian Estimation. Sensors. 2020; 20(5):1374. https://doi.org/10.3390/s20051374
Chicago/Turabian StyleZhu, Guolei, Yingmin Wang, and Qi Wang. 2020. "Matched Field Processing Based on Bayesian Estimation" Sensors 20, no. 5: 1374. https://doi.org/10.3390/s20051374
APA StyleZhu, G., Wang, Y., & Wang, Q. (2020). Matched Field Processing Based on Bayesian Estimation. Sensors, 20(5), 1374. https://doi.org/10.3390/s20051374