4.1. Energy and Efficiency Calibration
The energy calibration function converts the channel number
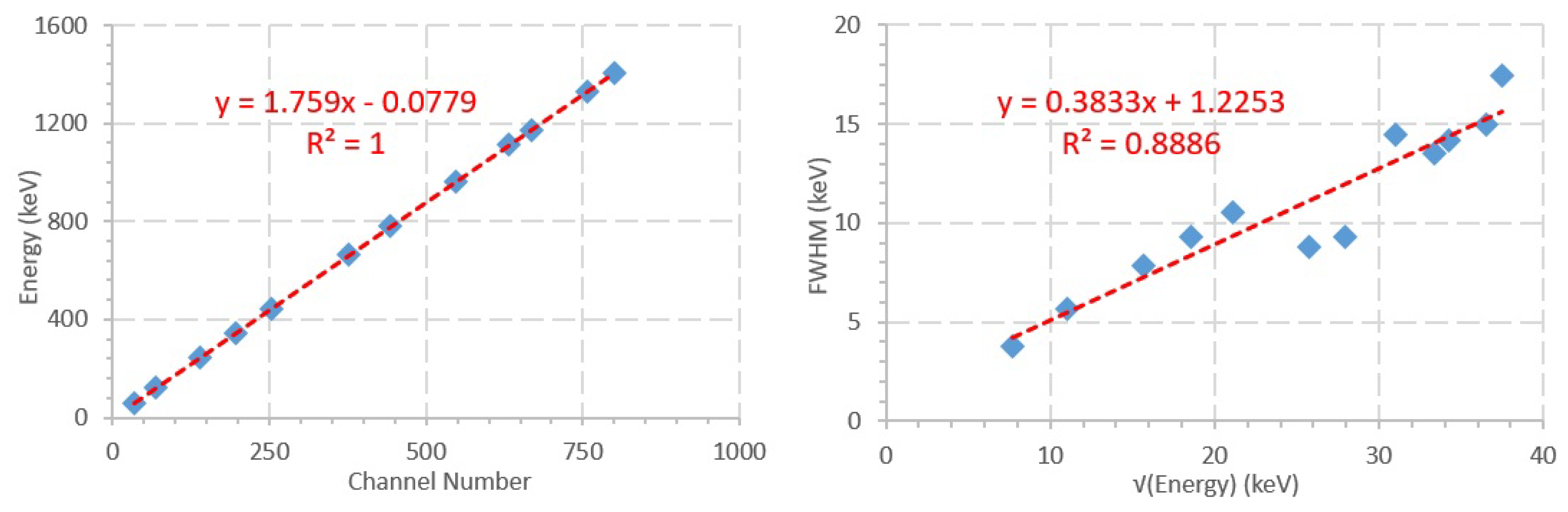
c to energy. In semiconductor spectroscopy, energy calibration is typically represented by a linear regression, defining the relationship between channel number and measured energy of the peak mean energy. The full FWHM is another metric used in spectroscopy. Shaping, or FWHM, calibration allows for the correct adjustment of experimental peaks, which is mandatory for the integration of total counts inside the peak area. A linear regression of the FWHM values was calculated. Efficiency (
) was calculated as the ratio between the number of counts measured by the detector and the total number of particles emitted by the sources (i.e., activity of the sources at the time of measurement), in a set amount of time. The number of counts measured by the detector was calculated as the peak area, as presented by
InterSpec. The efficiency uncertainty was retrieved directly from InterSpec.
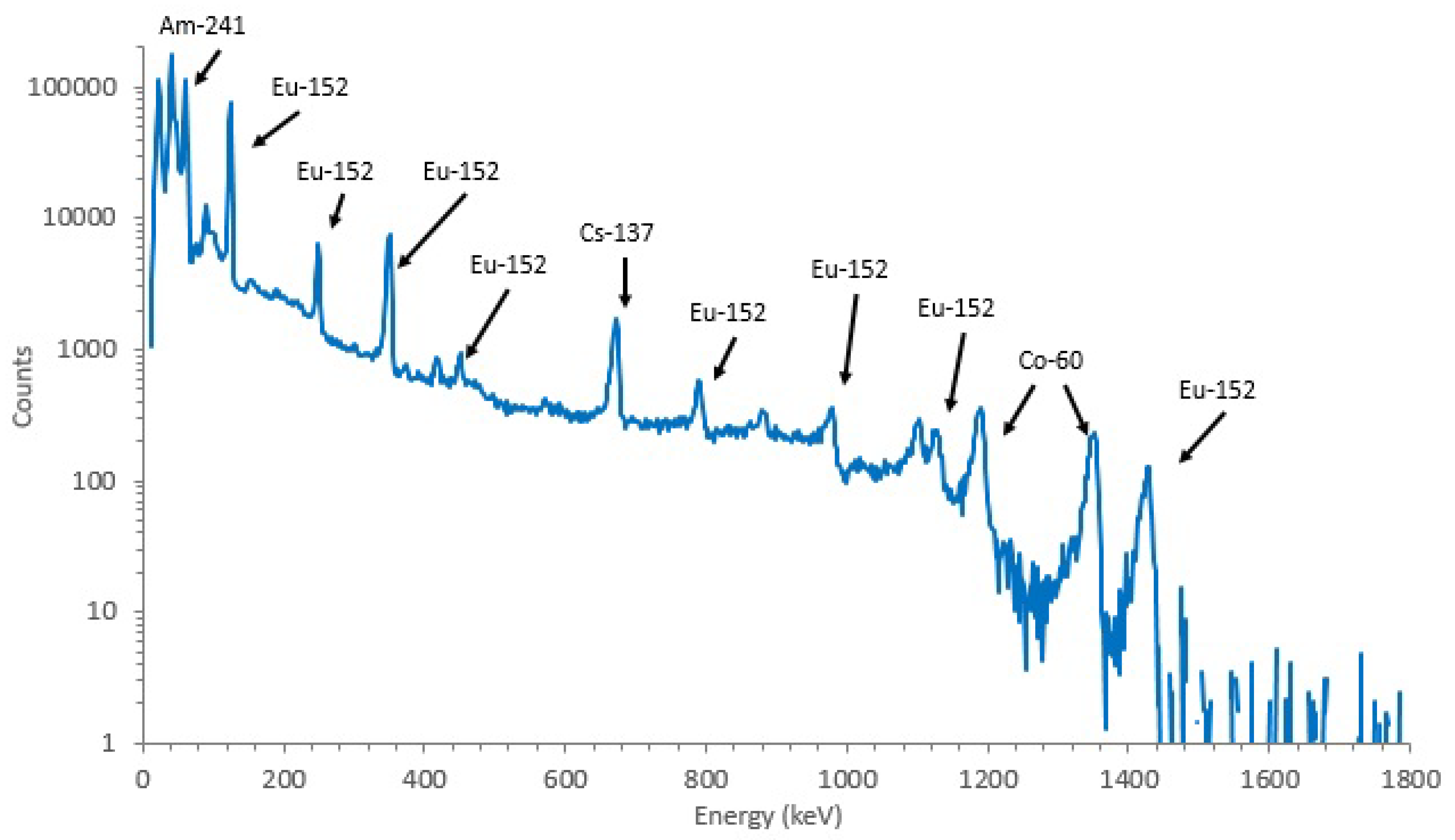
Table 4 presents the peaks considered for calibration, as well as their characteristics taken from the CZT spectrum acquired with the calibration sources (
Figure 3).
To obtain the energy calibration curves, Microsoft Excel
was used to obtain a least-squares linear fit of the data. For the FWHM curve a square root dependency was considered. The energy calibration measurements and linear fit are depicted in
Figure 5 and can also be described by Equation (
1). The FWHM calibration curve and linear regression, described by Equation (
2), can also be observed in
Figure 5.
where
c is the channel number, and
E the energy in KeV.
The efficiency value for each considered peak, as well as its uncertainty, can be consulted in
Table 4.
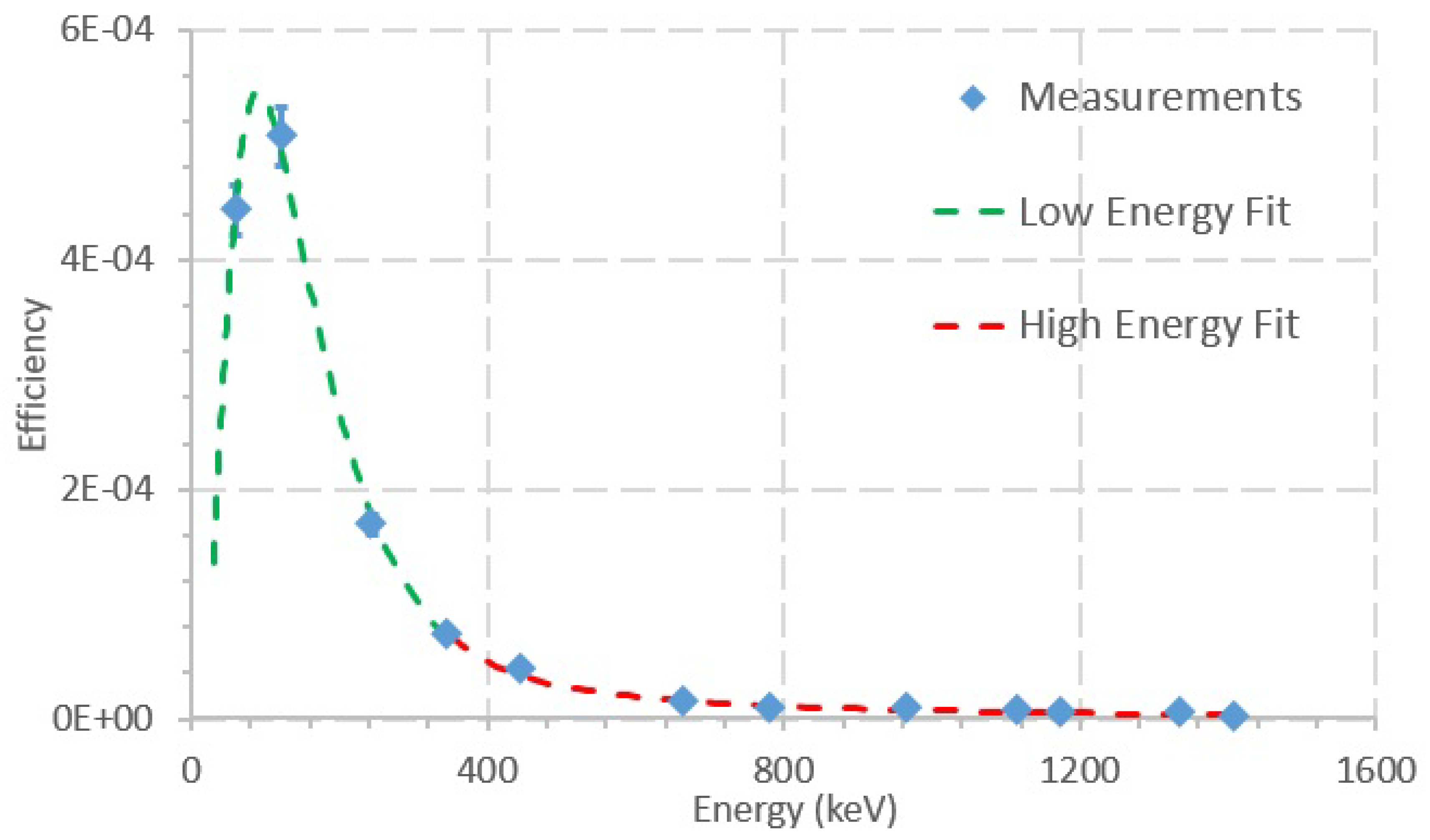
Two polynomial regression curves of the logarithms of energy and efficiency were calculated: one for lower energies and one for higher energies. To obtain the efficiency calibration curves, Microsoft Excel
software was used to obtain third- and second-order polynomial fits of the data. A logarithmic dependency was considered for both the dependent variable (energy) and the independent variable (
).
Figure 6 shows peak efficiency for each considered peak.
Up to
keV, the calibration curve is given by:
Above
keV, the calibration curve is:
where
is photopeak efficiency and E is the peak energy.
Several fits were obtained for the data at different energy ranges. Equations (
3) and (
4) correspond to the fits that minimized the relative differences between the measured efficiencies of the peaks and the efficiency values calculated with the fit curves. The relative differences between the measured efficiencies of the peaks and the efficiency values calculated with the fit curves were, on average, 0.3%, with maximum and minimum values of 0.6% and 0.04%, respectively.
The manufacturer declares the resolution of the CZT detector to be better than
FWHM @ 662 keV. The measurement performed in this work for the same energy and described geometry shows
keV (
) FWHM, which is better than expected. Moreover, the efficiency calibration curves observed in
Figure 6 were compared to other published efficiency calibration curves of CZT detectors [
27,
28,
29]. The efficiency curve in this work is very similar in shape to the other published efficiency curves, whereas the values of the efficiencies in other works vary one or two orders of magnitude, which may be explained by the use of different acquisition geometries and different models of CZTs.
The calibration curves reported in this work were obtained considering peaks between 59 and 1408 keV. When performing measurements in areas with high uranium concentrations, such as out of commission uranium mines, it is expected to find radioisotopes created from the decay of U-235, U-238, and Th-232. The gamma emissions of the decay of these radionuclides are mainly within the range of energies used in this work. No list of the emissions of the decay chains of U-235, U-238, and Th-232 is presented in this paper because extensive lists have been published in elsewhere [
37,
38].
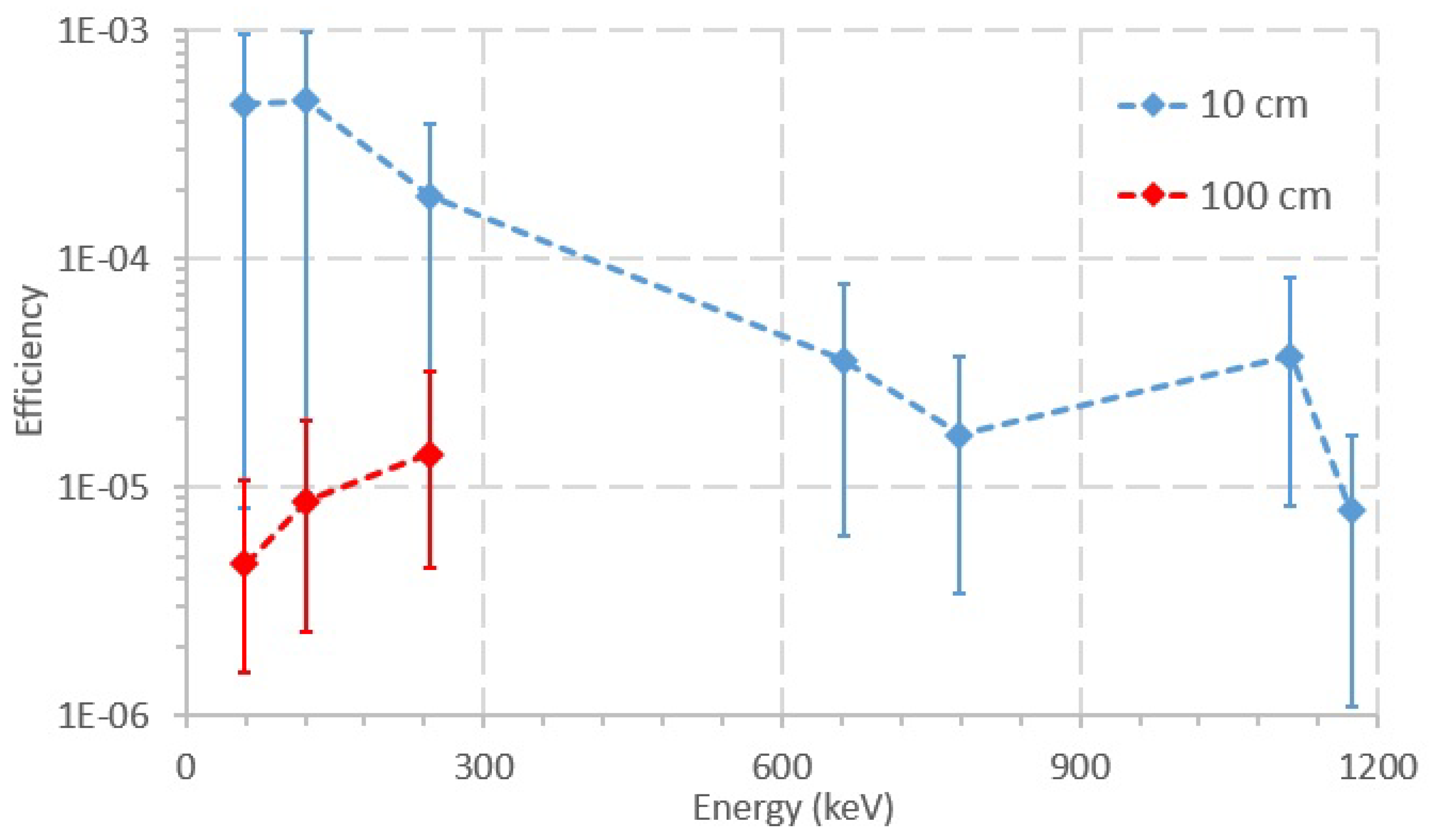
4.3. CZT Sensitivity Analysis
Figure 7 shows a graph of the efficiency for the acquisition at 10 cm and 100 cm SDD. In general, efficiency values tend to be lower when the SDD is higher. For 100 cm SDD, only three peaks could be identified in the graph, namely 59, 121, and 244 keV. At SDD equal to 200 cm, there was no visible difference between the foreground and the background spectra.
Figure 8 shows a graph of efficiency as a function of energy and acquisition time, for different acquisition times. In general, using shorter acquisition times, fewer peaks can be observed in the acquired spectra. For acquisition times of 1 and 2 min, only peaks with mean energy lower than 400 keV can be observed, while, for acquisition time of 5 min, the Cs-137 peak (662 keV) can already be observed. Only for acquisition times of 10, 20 and 30 min can peaks over 662 keV be observed. Moreover, the acquisition time also influences the total number of detected peaks. At lower acquisition times (<5 min), only three peaks are identifiable in the acquired spectra. However, at higher acquisition times, six, five, and seven peaks can be observed for acquisition times of 10, 20, and 30 min, respectively. In general, using shorter acquisition times, two observations can be drawn: (1) fewer peaks can be observed in the acquired spectra; and (2) only peaks with lower average energy can be observed.
When comparing
Figure 6 and
Figure 7, it is noticeable that the shorter acquisition time in
Figure 7 (by a factor of approximately 48) entails higher uncertainty values for the efficiency. In addition, when considering shorter acquisition times, there are less identifiable peaks in the acquired spectra. Regarding
Figure 8, two observations can be drawn when shorter acquisition times are used: (1) fewer peaks can be observed in the acquired spectra; and (2) only peaks at lower average energies can be observed. The observed peaks at acquisition times of 10 to 30 min are approximately half of the identifiable peaks in the CZT calibration spectra. However, the average energies of the peaks acquired at 30 min range between 59 and 1173 keV, which may be enough to estimate the activity of the radiation sources present in a field scenario. Moreover, in
Figure 8, the uncertainty values rise when the acquisition time is shorter, because the CZT detects fewer counts, which leads to higher uncertainty for each channel/energy. Although the peak at 1332 keV is only seen at the 10 min acquisition time, it should also have been identifiable in the 20 and 30 min spectra. This inaccuracy is attributed to the uncertainty in the number of counts of the peak acquired when performing the measurements.
4.4. GMC Verification
Table 6 and
Table 7 report the results of the measurements with the GMCs at three different distances from three radiation sources. The tabulated equivalent dose rate values for each source at each distance are only inserted in
Table 6 because they are the same for both GMCs. According to
Table 6 and
Table 7, the average CPM of the set of measurements for both GMCs increases. In addition, the standard deviation and coefficient of variation decrease at shorter distances and when using sources with higher activity. Moreover, while at higher count rates (i.e., lower SDD and using a source with higher activity), the coefficients of variance are similar for both GMCs, at lower count rates (i.e., for the 74 MBq source) the coefficients of variance are higher—by a factor of approximately 2—for the Sparkfun.
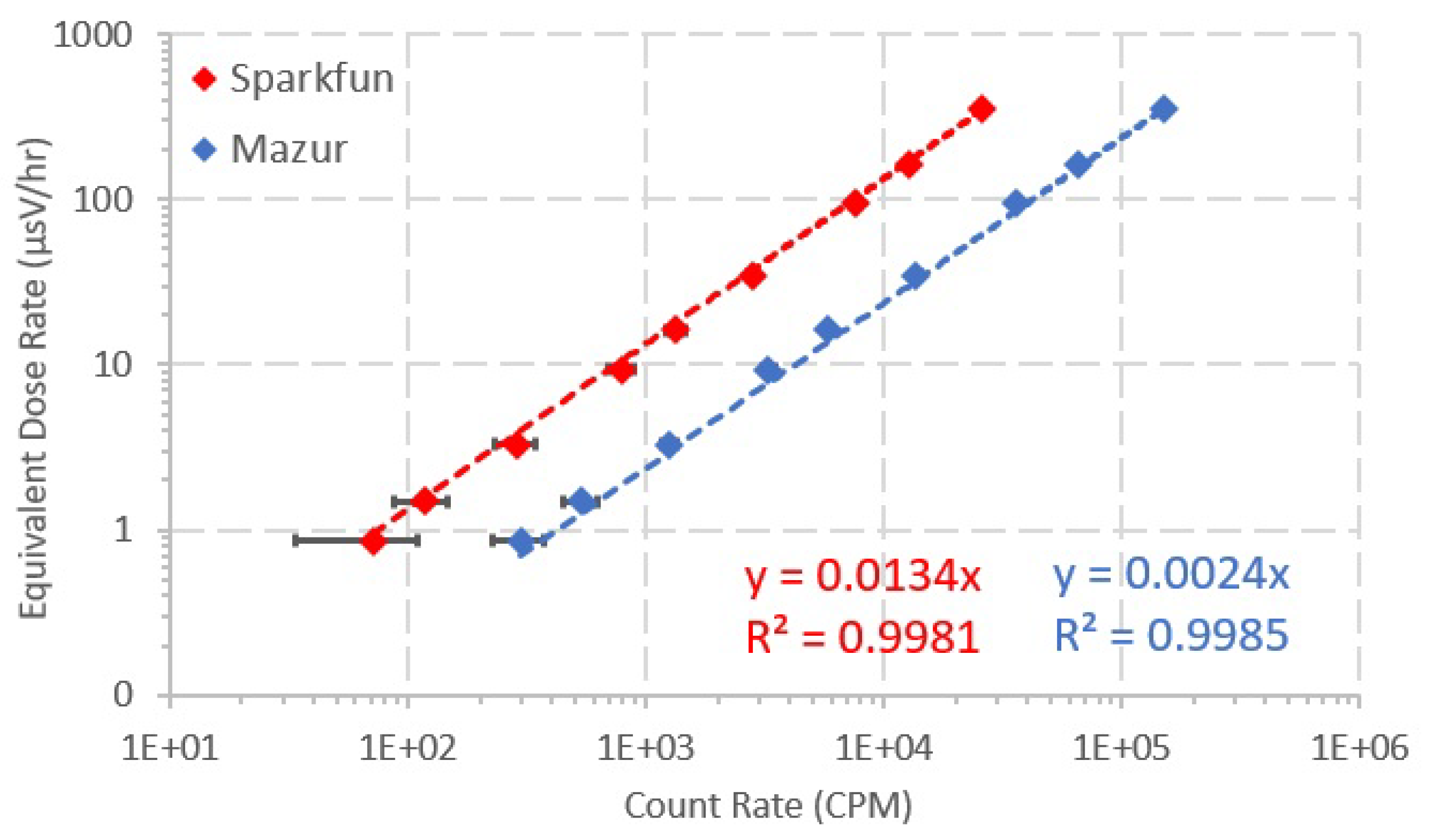
Figure 9 shows plots of the equivalent dose rate value (
Sv/h) as a function of the count rate of each GMC for all source-distance configurations. Microsoft Excel
software was used to obtain a least-squares linear fit of the data. The interception with the
yy-axis was set to zero, in order to avoid negative dose rate values for very low count rate values. The linear regressions show that the conversion coefficient varies linearly with the count rate and the equation of the fit can be used to calculate the dose rate as a function of the acquired count rate (Equations (
5) and (
6)).
The validation procedure was undertaken by placing both GMCs at three different distances from three sources with different activities. As expected, the average count rate for both GMCs increases and the standard deviation and coefficient of variation decrease at shorter SDD, as well as when using sources with higher activity. Considering higher count rates (i.e., sources of 740 and 7400 MBq), the coefficients of variation are much lower and considered to be sufficiently low for the application considered in this work (i.e., radiological mapping). For example, coefficients of variation for the 7400 MBq source are, on average, much lower than for the 74 MBq source, by a factor of approximately 10 and 20 for the Mazur and the Sparkfun, respectively. This effect was due to the higher flux of particles the sensors are able to detect at shorter SDD and with higher activity sources, which raises the count rate and lowers the standard deviation and uncertainty of the measurements.
However, at lower count rates (i.e., higher SDD and using lower activity sources), the coefficients of variation are, in general, lower for the Mazur than for the Sparkfun (by a factor of approximately 2). While for the Mazur the coefficients of variation are acceptable and frequent for this type of detectors, the Sparkfun reports a coefficient of variation with a high value and outside of the expected range of values (i.e., 53%). Additionally, the count rate is consistently higher for the Mazur when compared to the Sparkfun, by an average factor of 4.5. The Mazur is clearly much more sensitive than the Sparkfun, being able to detect more events per unit time and consequently lowering the uncertainty of the measurements. This probably happens because the Mazur is a much more recent and state-of-the-art equipment recommended for NORM detection, while the Sparkfun is an older equipment which is no longer for sale and has been replaced by other equipment. Furthermore, the tube size and sensitive volume are much larger for the Mazur than for the Sparkfun.
The conversion coefficient (in
sV/h/CPM) was calculated for both GMCs considering three different sources and three different distances to source. According to
Figure 9, the linear regressions represent a very good fit to the data (very high R2 value) and the conversion factor varies linearly with the count rate. Therefore, Equations (
5) and (
6) can be used to carry out the conversion from count rate to dose rate for the Sparkfun and the Mazur, respectively.
Moreover, the Mazur manual [
36] reports its sensitivity to be 3500 CPM/mR/h ≈ 350 CPM/
Sv/h. If this number were inverted, the correction factor would be
Sv/h/CPM, which is within the range of the conversion factors obtained in this study considering various radiation sources and SDDs.
4.5. GMC Sensitivity Analysis
The dose rate for each GMC was calculated using Equations (
5) and (
6) from the linear regressions presented in
Figure 9.
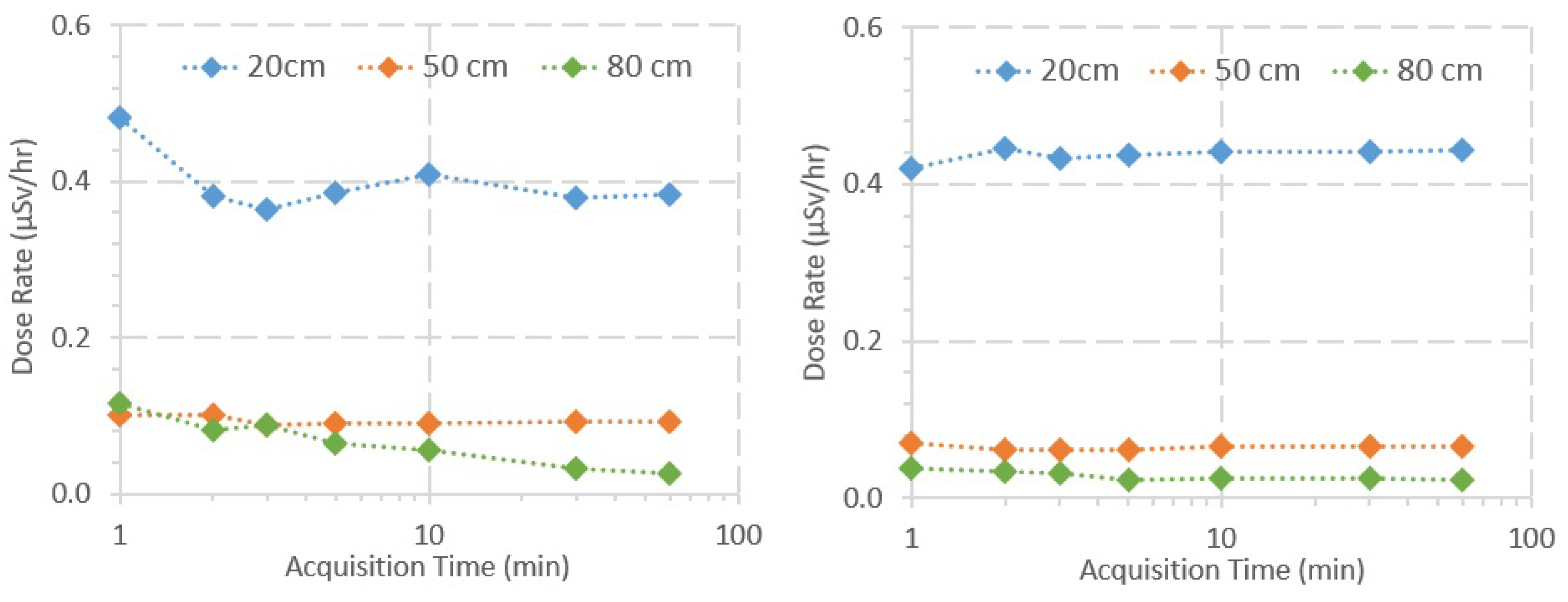
Figure 10 shows plots of the dose rate of each GMC as a function of the SDD and the acquisition time. Considering both GMCs, the dose rate varies much more with the SDD than with the acquisition time, which is supported by three observations in
Figure 10: (1) the dose rate decreases exponentially with the distance to the radiation source, according to the inverse-square law of the distance; (2) as the acquisition time increases, the dose rate values tend to converge to a real value; and (3) in general, the variation of the dose rate values for the same SDD is lower than the variation of the dose rate values between SDDs. In general, using acquisition times over 5 or 10 min, the measured values start to stabilize and do not vary significantly when compared to the highest acquisition time (i.e., 60 min). Moreover, there is a higher variance along the acquisition time in the dose rate values measured with the Sparkfun, when compared with the Mazur, and in the values measured at higher distances.
Regarding the response time measurements, according to the criteria described in
Section 3.5, each sensor was considered to have “detected” the sources when the count rate was higher than 1202 CPM and 205 CPM for the Sparkfun and the Mazur, respectively.
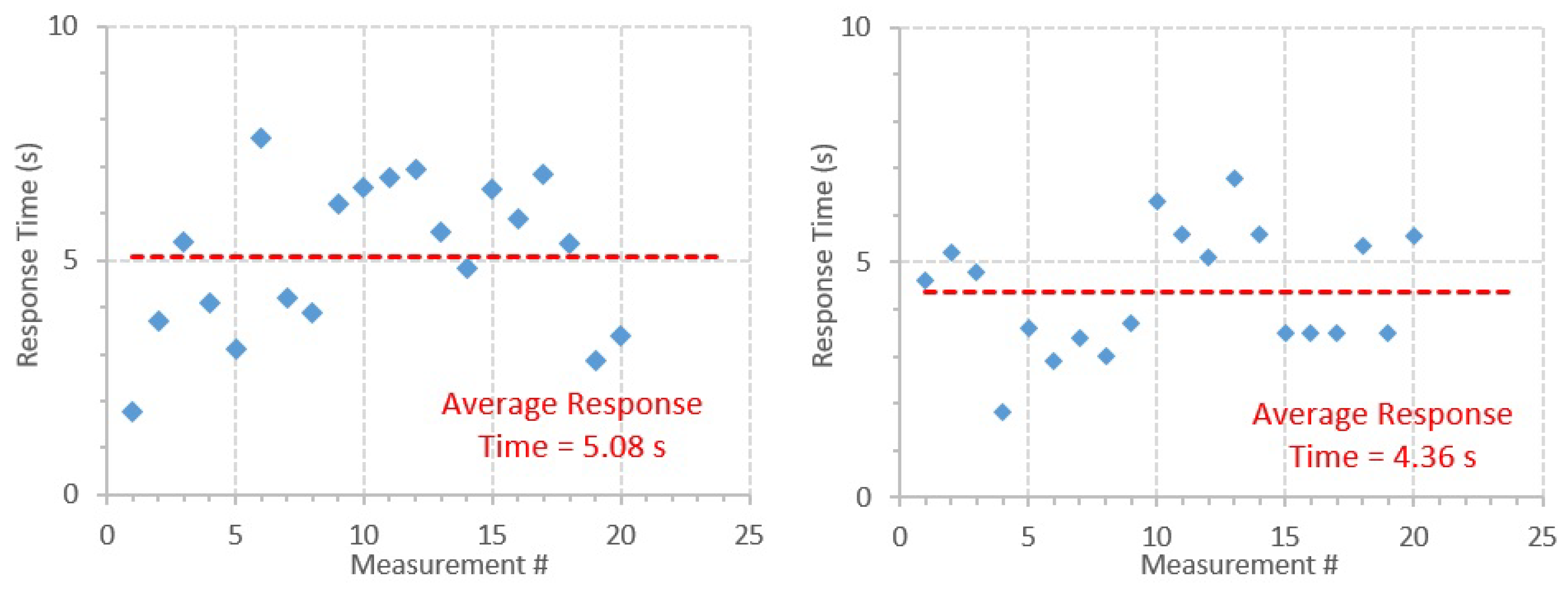
Figure 11 shows the response time for each measurement considering both GMCs. For the Sparkfun, the average response time was 5.08 s, with a standard deviation of 1.62 s and a coefficient of variation of 31.9%. For the Mazur, the average response time was 4.36 s, with a standard deviation of 1.30 s and a coefficient of variation of 29.8%. Considering the shorter time interval of 1 s, the Sparkfun was considered to have “detected” the sources almost always in the next measurement after the sources were placed in front of it. In this setup, the response time was, on average, approximately 1 s, with a maximum value of 2 s.
The results of the sensitivity analysis of the GMCs show that the acquired quantity is much more dependent on the SDD than on the acquisition time, which was expected, namely because the dose rate decreases exponentially with the SDD and the variance in dose rate for different acquisition times is, in general, not too high. Moreover, using acquisition times over 5–10 min, the measured values are considered, in general, accurate enough for the purpose of this work. Furthermore, the higher variance for the dose rate along the acquisition time with the Sparkfun (compared with the Mazur) and in the values measured at higher SDDs is explained above in
Section 4.4. The average response time is close for both GMCs, but slightly higher for the Sparkfun, namely because of the lower sensitivity when compared to the Mazur, which is due to the reasons already explained in
Section 4.4. However, when considering a time between measurements of 1 s for the Sparkfun, the response time decreases by factor of approximately 5, which increases the GMC sensitivity.
4.6. Recommendations and Flight Strategy for Radiological Monitoring Using UAVs
As mentioned in the Introduction, the global flight strategy for radiological monitoring and radiation mapping studied in this work comprised two stages: (1) generic monitoring, where GMCs on board of UAVs are used to scan the area of interest, and identify radiation hotspots; and (2) hotspot inspection, where a UAV with a CZT lands on each hotspot to verify the presence and identify and estimate the activity of possible radioactive sources.
Generic monitoring should be performed in a field scenario at 1–2 m from the ground, as a compromise between the height of the vegetation and the GMC sensitivity. The verification of the GMCs was performed in this range of SDDs. Linear equations were reported for conversion from the count rate (in CPM) provided by the GMCs to equivalent dose rate. To perform dose rate mapping, Equations (
5) and (
6) can be used to carry out this conversion for the Sparkfun and the Mazur, respectively. The results of the sensitivity analysis of the GMCs showed that the acquired quantity is much more dependent on the SDD than on the acquisition time. Moreover, for acquisition times over 5–10 min, the measured values are considered, in general, accurate. This finding will be very useful, because the confirmation of the existence of a
hotspot found during generic monitoring can be performed by a UAV with a GMC in a relatively short hover time (i.e., 5–10 min).
In addition, the response time measurements showed that the minimum hover time for the GMCs to detect a hotspot is 5.08 and 4.34 s for the Sparkfun and the Mazur, respectively. Considering a square with 1 m side, in order for a UAV to detect a hotspot, it would have to hover the square during at least the response time, and thus the minimum speed for the UAV would be 0.20 and 0.23 m/s for the Sparkfun and the Mazur, respectively. These are realistic UAV speeds for use in a field scenario. Moreover, the lower speeds contribute to a more accurate control on the UAV trajectory. However, if the detector response time decreased by a factor of 5 (i.e., to approximately 1 s), then the minimum UAV speed would increase to 1 m/s, thus decreasing the time necessary to perform radiological mapping of a given area.
In similar studies, radiological mapping was performed with UAVs flying at speeds mainly between 1 and 1.5 m/s, and between 1 and 10 m from the ground [
13,
14,
15,
17].
However, these studies performed radiological mapping in areas where radiological accidents happened, such as near Fukushima, where higher activity sources exist. Martin et al. [
4] used a UAV coupled with a CZT to perform radiological monitoring in out-of-commission uranium mines, flying at 1.5 m/s and at 5–15 m from the ground, due to the vegetation existing in the area (i.e., the treeline).
The speed recommended in this work is better suited for flying at lower altitudes, because possible obstacles are more easily avoided and flying at lower altitude allows for mapping with higher spatial resolution and more accurate radiological measurements.
Regarding the second flight strategy, since the gamma radiation emitted by the decayed species of U-235, U-238, and Th-232 are predominantly between 59 and 1173 keV, according to the conditions presented in this study, the spectra acquisition with the CZT should be performed at a short SDD, between 10 and 100 cm.
Given that the UAV with the CZT will land on the ground where a
hotspot is detected, a source–detector distance between 10 and 20 cm is feasible. Preferably, the acquisition should be performed as close as possible, and in no less than 30 min, in order to acquire spectra with the maximum number of peaks and with a higher number of counts, This will be reflected into lower uncertainties. Despite several other studies having used UAVs coupled with CZTs for radiological monitoring [
4,
6,
14,
15,
17], the CZTs were used to scan the area, instead of functioning as a precise measurement tool to assess the ionizing radiation spectra in small
hotspot areas identified by other detectors.
The protocol to apply after performing field measurements with the CZT is the following: (1) use Equation (
1) to convert channel number to energy and the mean energy of the peaks present in the spectrum to identify possible radionuclides present in the
hotspot; (2) calculate the ratio of the peak area of the acquired spectrum and the CZT efficiency at the peak mean energy (efficiency can be calculated using Equations (
3) and (
4)); and (3) determine the activity of the source present in the
hotspot by dividing the result by the respective yield on the decay scheme of the radionuclide.
It should be noted that the results reported in this work regarding the use of sensors for radiological monitoring were based on experiments at idealized distances and geometries and using the available sources. An effort was made to perform experiments in similar conditions to the ones that would exist in a field measurement (e.g., choosing the most adequate sources and SDDs) and thus the findings and recommendations are considered valid for the reported conditions.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}