A Multi-Static Radar Network with Ultra-Wideband Radio-Equipped Devices


Abstract
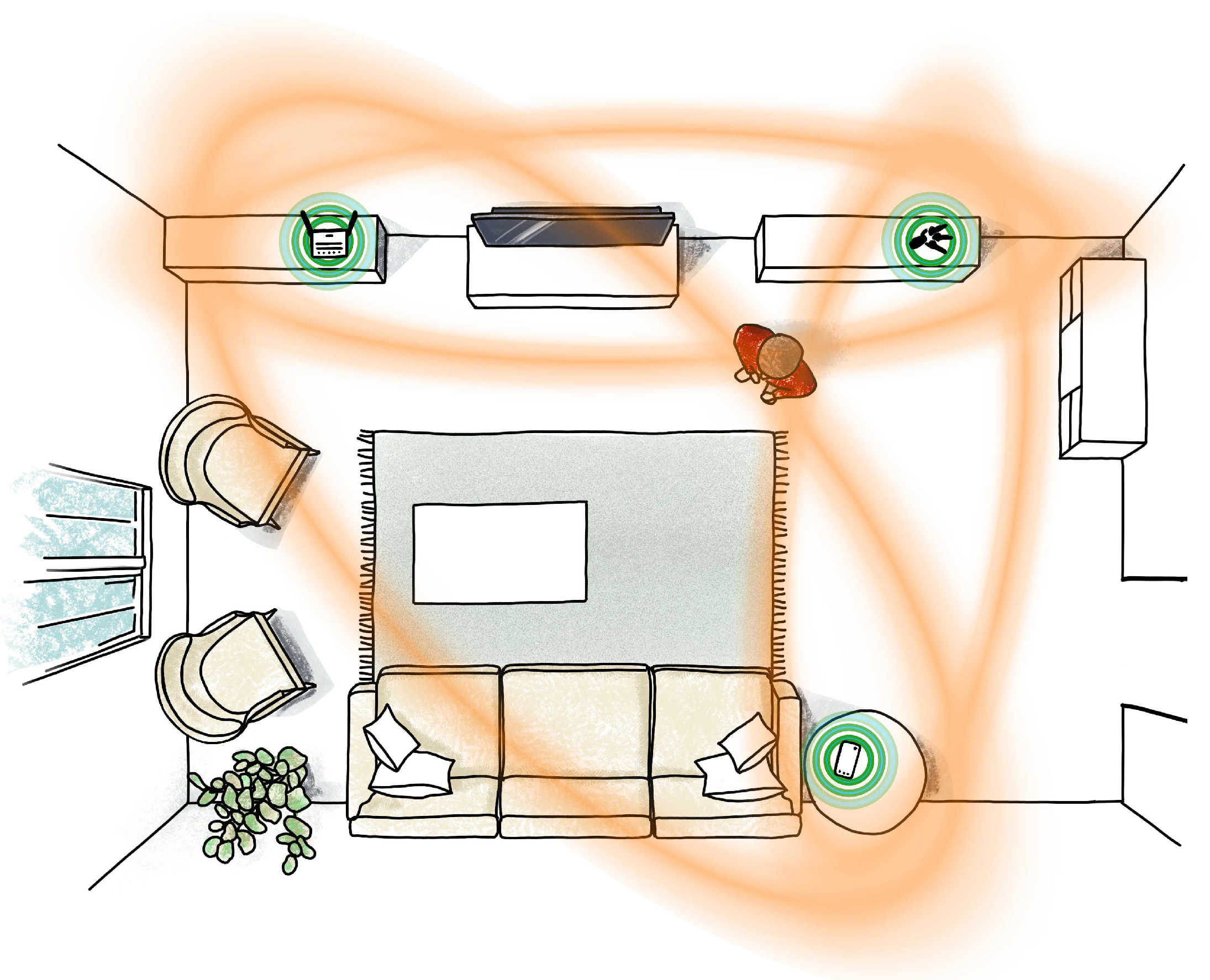
:1. Introduction
- by first localizing themselves with respect to each other,
- by tracking changes in the channel impulse response of each communication channel,
- by fusing these observed changes into a position estimate of a nearby person.
2. Related Work
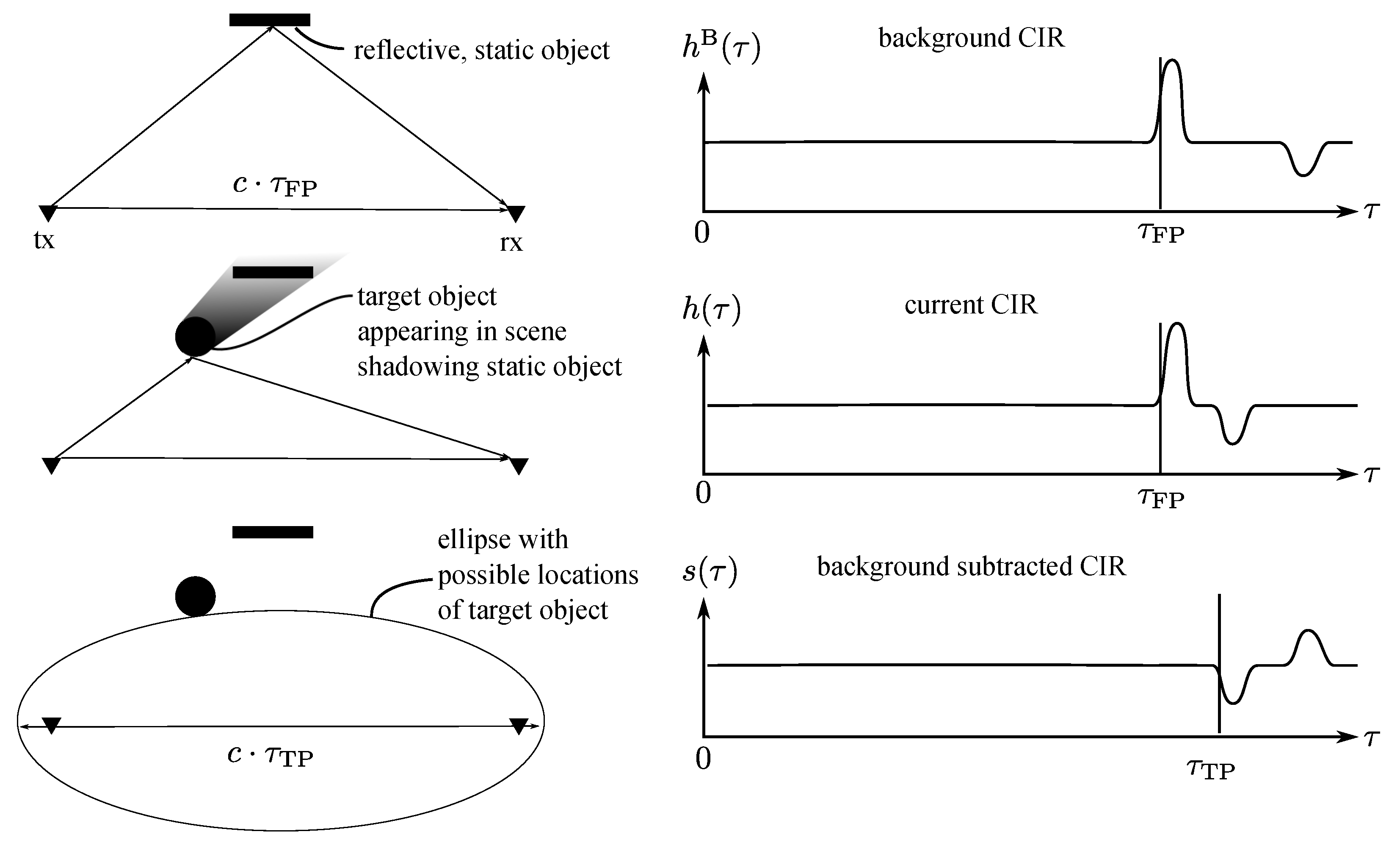
3. Channel Impulse Response
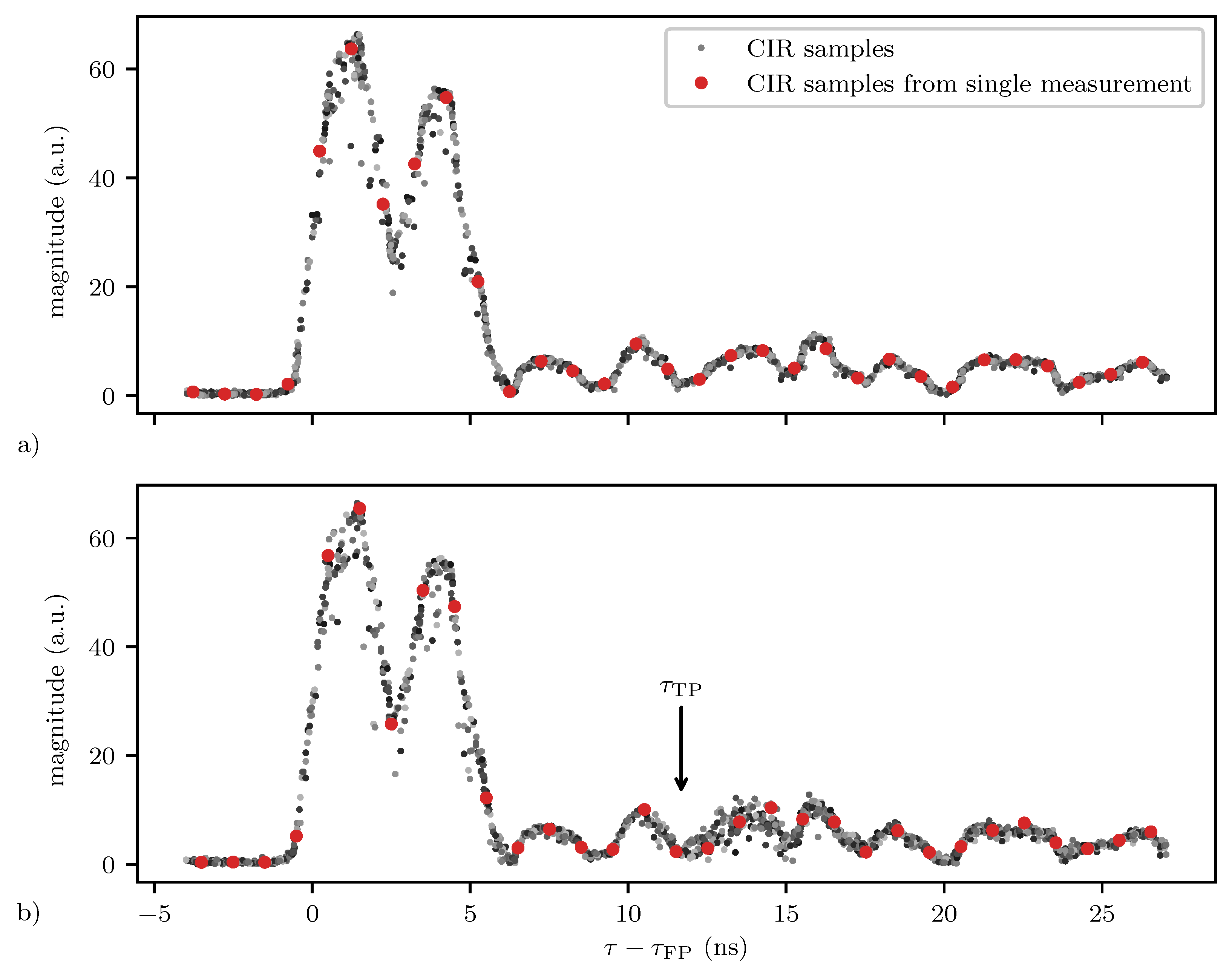
CIR Measurements with Two DWM1000 Transceivers
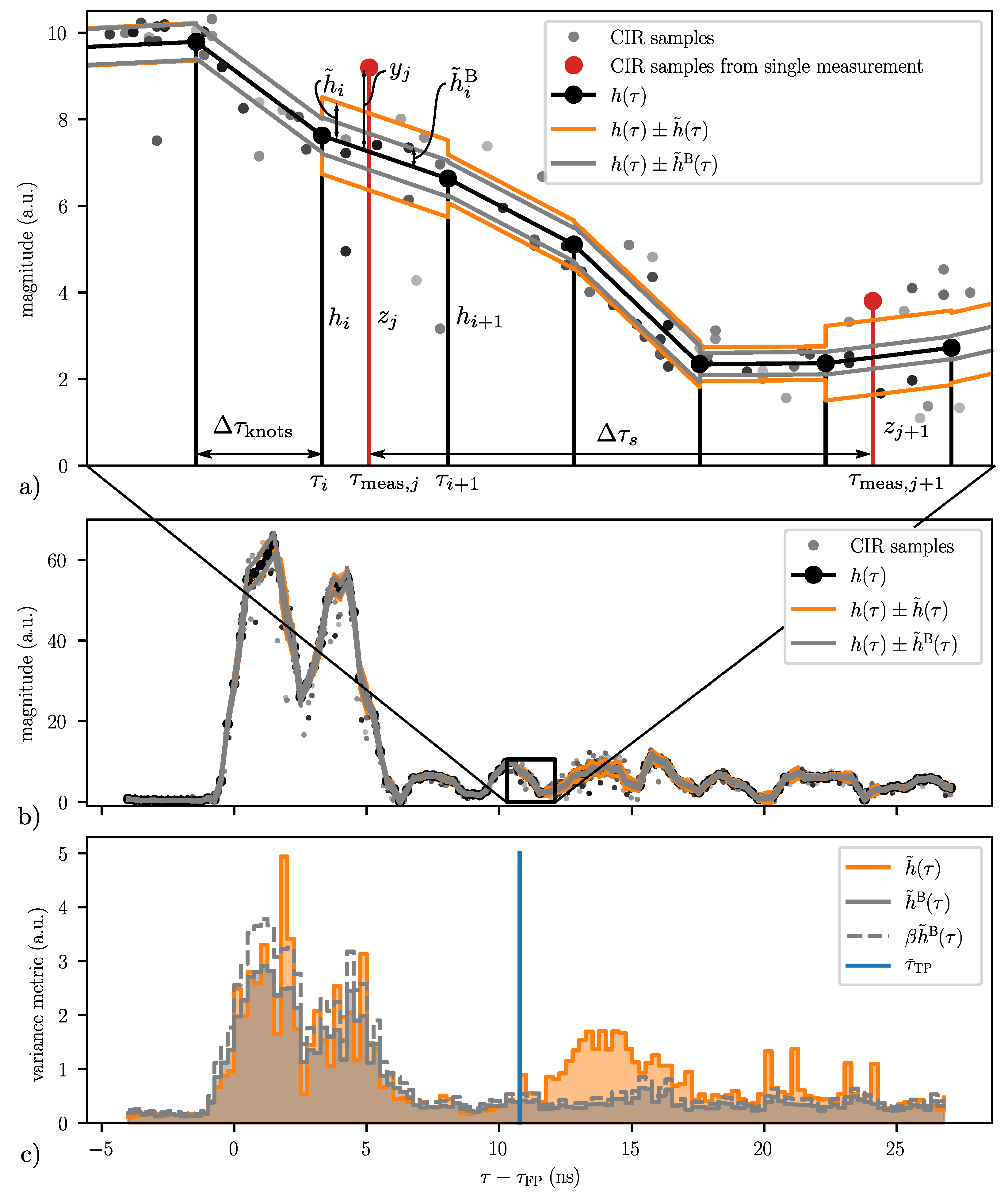
4. CIR Filtering
4.1. Mean Filtering
4.2. Innovation Signal Filtering
4.3. Background Subtraction and Leading Edge Detection
4.4. Outlier Rejection
- A CIR measurement must be based on a minimal number of accumulated preamble symbols picked as half the number of preamble symbols transmitted (see Table A1 in Appendix B). We observed that a CIR measurement based on a lower number of preamble symbols is much more likely to correspond to an outlier.
- The CIR samples before the estimated first path location must be smaller than a multiple of the first knot coefficient which is indicative of the noise floor. A factor of five was used for the experimental results presented later. In case the estimated first path location is too late, CIR samples before the estimated first path are likely to be significantly higher than the noise floor.
- The largest sample of the measured CIR must not deviate too much from the maximal knot coefficient. In the experimental results presented, a measurement was rejected when its largest sample was more than five times smaller or two times larger than the maximal knot coefficient.
5. Network Sensing
5.1. Protocol
- localize itself with respect to the other devices,
- synchronize its clock with respect to the network clock,
- localize a person within the space occupied by the network.
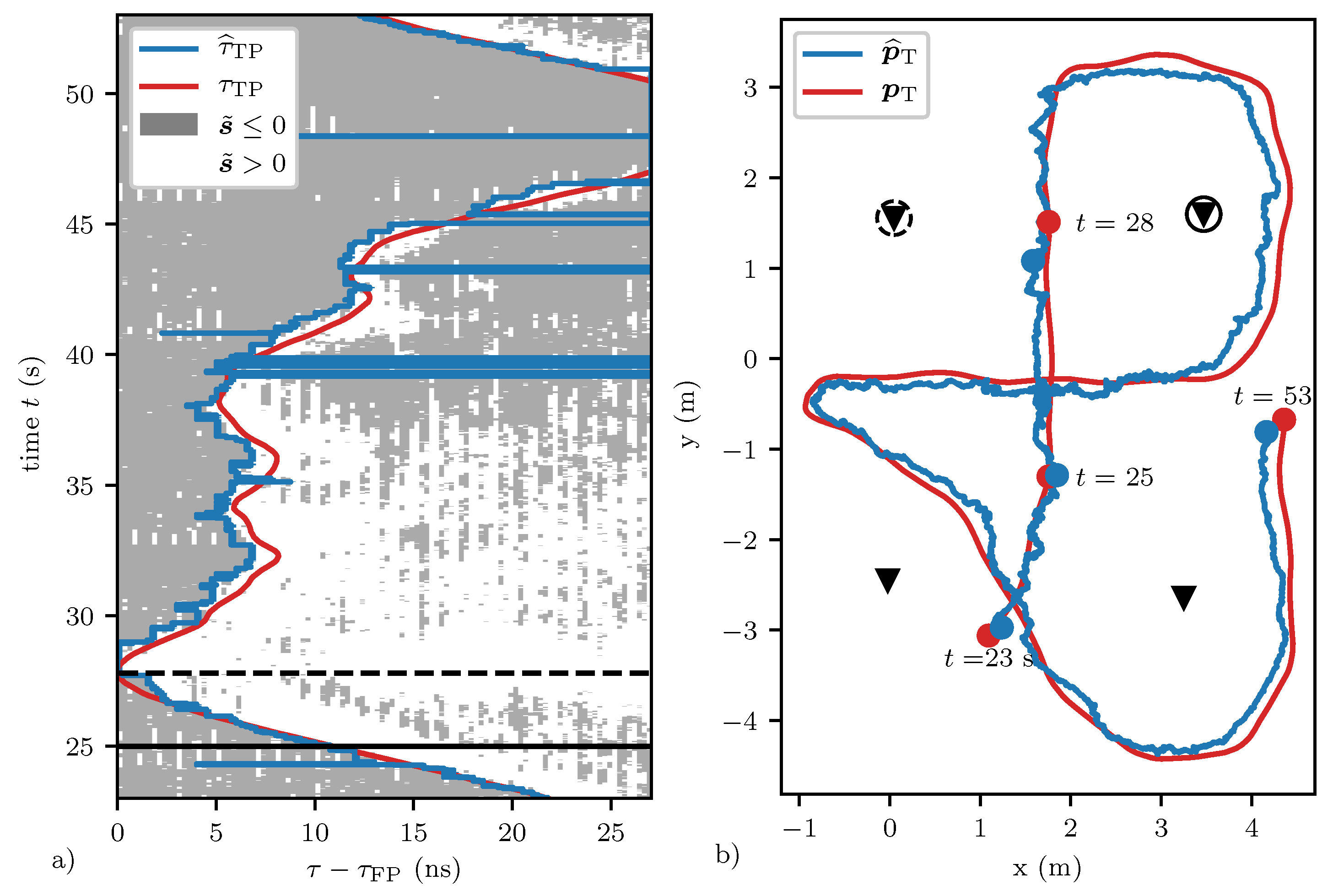
5.2. Particle Filter
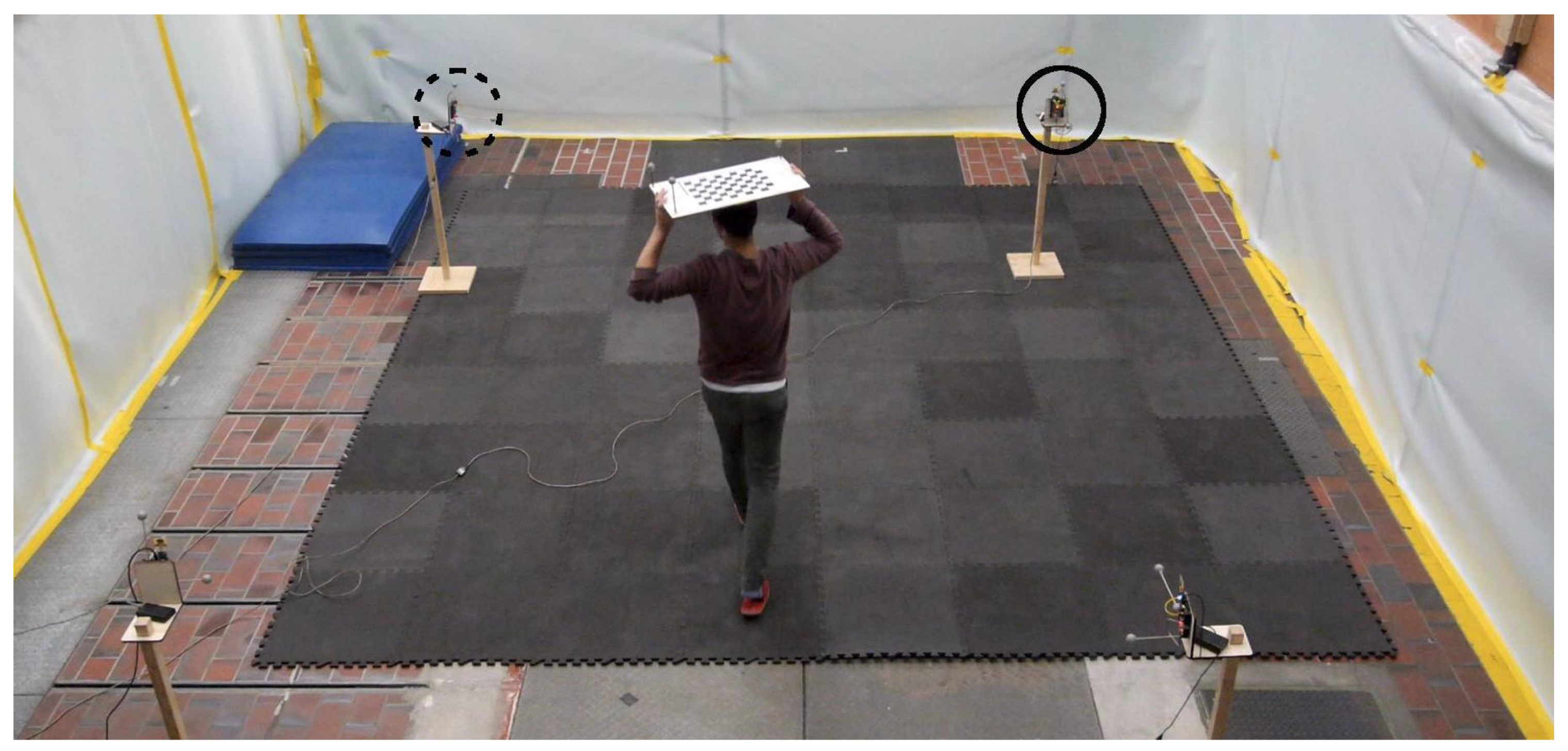
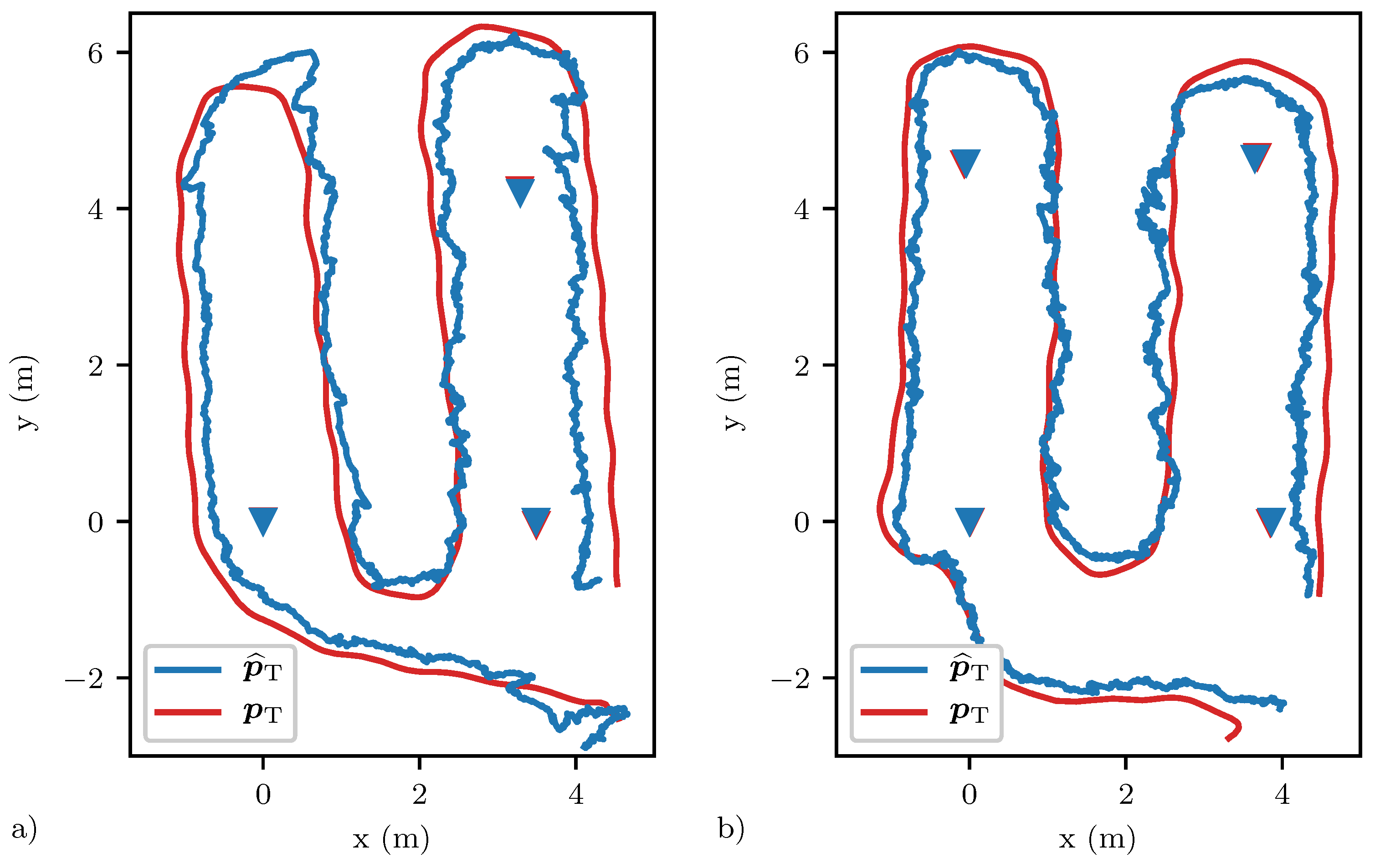
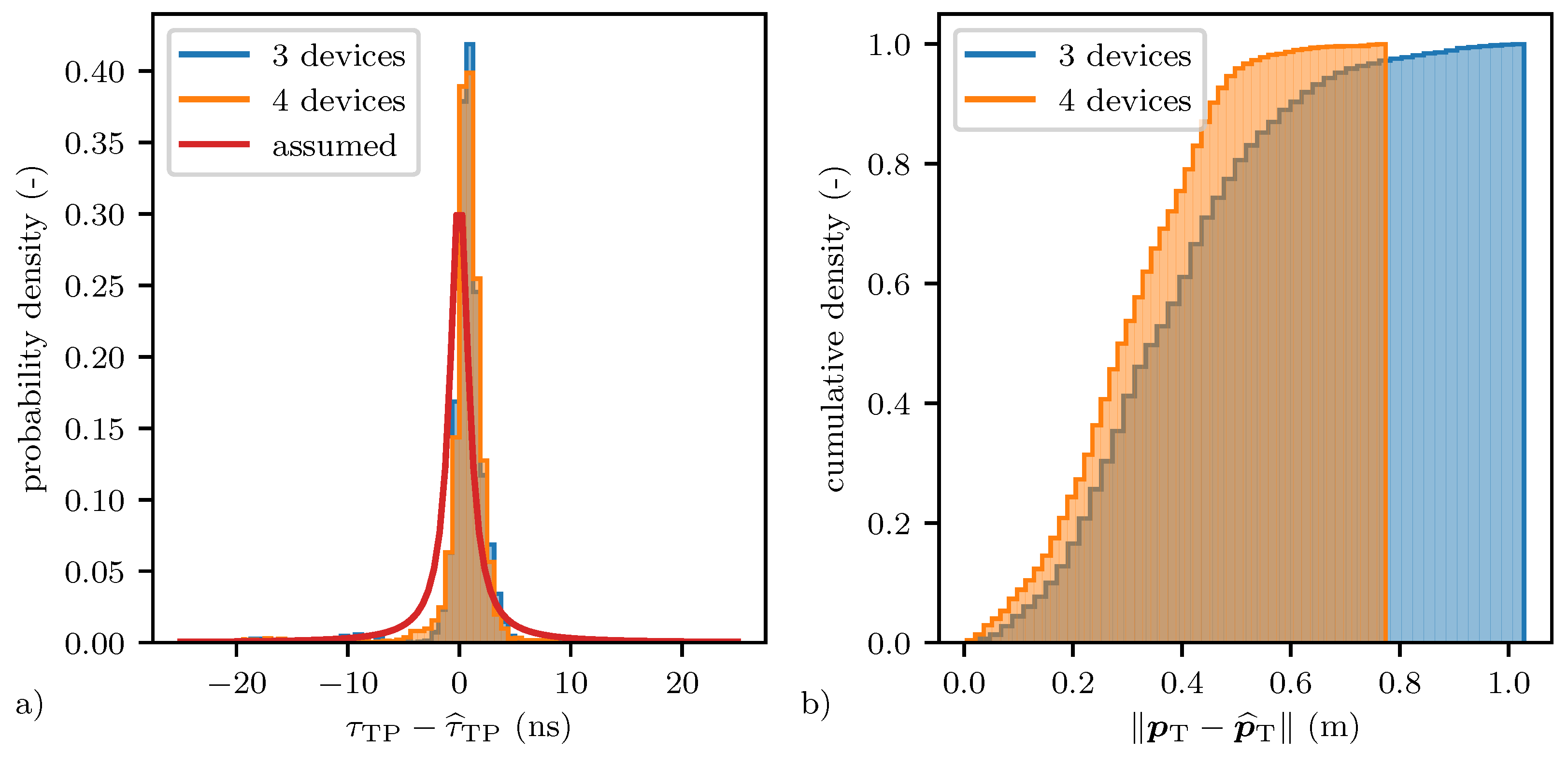
6. Experimental Evaluation
6.1. Evaluation on CIR Measurements Dataset
6.2. Implementation and Real-Time Results
7. Conclusions
Limitations and Potential Mitigations
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Calculation of Coefficient Update Gain
Appendix B. Parameter Settings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel Number | 4 (Carrier Frequency 3993.6 MHz, Bandwith 900 MHz) |
| Pulse Repetition Frequency | 16 MHz |
| Data Rate | 6.8 Mbps |
| Preamble Length | 128 Symbols |
| Preamble Accumulation Size | 8 |
| Preamble Code | 7 |
| Transmit Power Control | 19 dB Gain |
References
- McGregor, J. Ultra-Wideband (UWB) Gains Traction as a Sensing Technology Under New Industry Consortium. Available online: https://www.forbes.com/sites/tiriasresearch/2019/08/01/ultra-wideband-uwb-gains-traction-as-a-sensing-technology-under-new-industry-consortium/ (accessed on 2 December 2019).
- England, R. Sony and Samsung Resurrect Ultra-Wideband to Improve Location Tracking. Available online: https://www.engadget.com/2019/08/01/sony-and-samsung-resurrect-ultra-wideband-to-improve-location-tr/ (accessed on 12 March 2020).
- Abuelsamid, S. Volkswagen to Debut NXP Ultrawideband Technology in 2019. Available online: https://www.forbes.com/sites/samabuelsamid/2019/08/26/volkswagen-to-debut-nxp-uwb-technology-in-2019/ (accessed on 16 January 2020).
- Ertan, T.; Ledvina, B.M.; Brumley, R.W.; Meyer, A.S.; Tsoi, P.C. Electronic Devices with Motion Sensing and Angle of Arrival Detection Circuitry. U.S. Patent 2019/0317177 A1, 17 October 2019. [Google Scholar]
- Cisco, Sewio Team Up Regarding Ultra-Wideband Access Points - 2019-10-18 - Page 1 - RFID Journal. Available online: https://www.rfidjournal.com/articles/view?19016 (accessed on 30 December 2019).
- Zetik, R.; Shen, G.; Thomä, R.S. Evaluation of requirements for UWB localization systems in home-entertainment applications. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–8. [Google Scholar]
- Diraco, G.; Leone, A.; Siciliano, P. A Radar-Based Smart Sensor for Unobtrusive Elderly Monitoring in Ambient Assisted Living Applications. Biosensors 2017, 7, 55. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paolini, E.; Giorgetti, A.; Chiani, M.; Minutolo, R.; Montanari, M. Localization Capability of Cooperative Anti-Intruder Radar Systems. EURASIP J. Adv. Signal Process. 2008, 2008, 726854. [Google Scholar] [CrossRef] [Green Version]
- Khajenasiri, I.; Zhu, P.; Verhelst, M.; Gielen, G. Low-energy UWB transceiver implementation for smart home energy management. In Proceedings of the 18th IEEE International Symposium on Consumer Electronics (ISCE 2014), JeJu Island, Korea, 22–25 June 2014; pp. 1–2. [Google Scholar]
- DWM 1000 Datasheet. Available online: https://www.decawave.com/sites/default/files/resources/DWM1000-Datasheet-V1.6.pdf (accessed on 4 February 2020).
- Hamer, M.; D’Andrea, R. Self-Calibrating Ultra-Wideband Network Supporting Multi-Robot Localization. IEEE Access 2018, 6, 22292–22304. [Google Scholar] [CrossRef]
- Ledergerber, A. Dataset Accompanying Paper “A Multi-Static Radar Network with Ultra-Wideband Radio-Equipped Devices”. 2020. Available online: http://hdl.handle.net/20.500.11850/397625 (accessed on 12 March 2020).
- A Multi-Static Radar Network with Ultra-Wideband Radio-Equipped Devices, Experiments. Available online: https://youtu.be/6zRLMpzFvcg (accessed on 12 March 2020).
- James, R. A history of radar. IEEE Rev. 1989, 35, 343–349. [Google Scholar] [CrossRef]
- Denis, S.; Berkvens, R.; Weyn, M. A Survey on Detection, Tracking and Identification in Radio Frequency-Based Device-Free Localization. Sensors 2019, 19, 5329. [Google Scholar] [CrossRef] [Green Version]
- Shit, R.C.; Sharma, S.; Puthal, D.; James, P.; Pradhan, B.; Moorsel, A.V.; Zomaya, A.Y.; Ranjan, R. Ubiquitous Localization (UbiLoc): A Survey and Taxonomy on Device Free Localization for Smart World. IEEE Commun. Surv. Tutor. 2019, 21, 3532–3564. [Google Scholar] [CrossRef]
- Savazzi, S.; Sigg, S.; Nicoli, M.; Rampa, V.; Kianoush, S.; Spagnolini, U. Device-Free Radio Vision for Assisted Living: Leveraging wireless channel quality information for human sensing. IEEE Signal Process Mag. 2016, 33, 45–58. [Google Scholar] [CrossRef] [Green Version]
- Adib, F.; Kabelac, Z.; Katabi, D.; Miller, R.C. 3D Tracking via Body Radio Reflections. In Proceedings of the 11th USENIX Conference on Networked Systems Design and Implementation, Seattle, WA, USA, 2–4 April 2014; pp. 317–329. [Google Scholar]
- Zhao, P.; Lu, C.X.; Wang, J.; Chen, C.; Wang, W.; Trigoni, N.; Markham, A. mID: Tracking and Identifying People with Millimeter Wave Radar. In Proceedings of the 2019 15th International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini Island, Greece, 29–31 May 2019; pp. 33–40. [Google Scholar]
- Zetik, R.; Jovanoska, S.; Thomä, R. Simple method for localisation of multiple tag-free targets using UWB sensor network. In Proceedings of the 2011 IEEE International Conference on Ultra-Wideband (ICUWB), Bologna, Italy, 14–16 September 2011; pp. 268–272. [Google Scholar]
- Kocur, D.; Švecová, M.; Rovňáková, J. Through-the-Wall Localization of a Moving Target by Two Independent Ultra Wideband (UWB) Radar Systems. Sensors 2013, 13, 11969–11997. [Google Scholar] [CrossRef]
- Kilic, Y.; Wymeersch, H.; Meijerink, A.; Bentum, M.J.; Scanlon, W.G. Device-Free Person Detection and Ranging in UWB Networks. IEEE J. Sel. Top. Sign. Proces. 2014, 8, 43–54. [Google Scholar] [CrossRef] [Green Version]
- Sachs, J. Handbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, Applications; Wiley-VCH: Weinheim, Germany, 2012. [Google Scholar]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO Radar with Widely Separated Antennas. IEEE Signal Process Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Y.; Lai, H.Q.; Han, Y.; Liu, K.R. High accuracy indoor localization: A WiFi-based approach. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 6245–6249. [Google Scholar]
- Tan, S.; Zhang, L.; Wang, Z.; Yang, J. MultiTrack: Multi-User Tracking and Activity Recognition Using Commodity WiFi. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 536:1–536:12. [Google Scholar] [CrossRef]
- Al-Qudsi, B.; Joram, N.; El-Shennawy, M.; Ellinger, F. Scalable indoor positioning system with multi-band FMCW. Sonar Navig. IET Radar 2018, 12, 46–55. [Google Scholar] [CrossRef]
- Pulutan, D.K.A.; Marciano, J.S. Design trade-offs in a combined FMCW and pulse Doppler radar front-end. In Proceedings of the IEEE 2013 Tencon - Spring, Sydney, NSW, Australia, 17–19 April 2013; pp. 567–571. [Google Scholar]
- Thomä, R.S.; Andrich, C.; Galdo, G.D.; Dobereiner, M.; Hein, M.A.; Kaske, M.; Schafer, G.; Schieler, S.; Schneider, C.; Schwind, A.; et al. Cooperative Passive Coherent Location: A Promising 5G Service to Support Road Safety. IEEE Commun. Mag. 2019, 57, 86–92. [Google Scholar] [CrossRef] [Green Version]
- Schmidhammer, M.; Gentner, C.; Siebler, B.; Sand, S. Localization and Tracking of Discrete Mobile Scatterers in Vehicular Environments Using Delay Estimates. Sensors 2019, 19, 4802. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Savazzi, S.; Kianoush, S.; Rampa, V.; Spagnolini, U. Cellular Data Analytics for Detection and Discrimination of Body Movements. IEEE Access 2018, 6, 51484–51499. [Google Scholar] [CrossRef]
- Hu, Z.; Zeng, Z.; Wang, K.; Feng, W.; Zhang, J.; Lu, Q.; Kang, X. Design and Analysis of a UWB MIMO Radar System with Miniaturized Vivaldi Antenna for Through-Wall Imaging. Remote Sens. 2019, 11, 1867. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Lauteslager, T.; Lande, T.S.; Constandinou, T.G. UWB Radar for Non-contact Heart Rate Variability Monitoring and Mental State Classification. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 6578–6582. [Google Scholar]
- Yang, Z.; Bocca, M.; Jain, V.; Mohapatra, P. Contactless Breathing Rate Monitoring in Vehicle Using UWB Radar. In Proceedings of the 7th International Workshop on Real-World Embedded Wireless Systems and Networks, Shenzhen, China, 4 November 2018; pp. 13–18. [Google Scholar]
- Čuljak, I.; Mihaldinec, H.; Kovačić, Z.; Cifrek, M.; Džapo, H. UWB Platform for Vital Signs Detection and Monitoring. In Proceedings of the World Congress on Medical Physics and Biomedical Engineering 2018, Prague, Czech Republic, 3–8 June 2018; pp. 33–37. [Google Scholar]
- Moschevikin, A.; Tsvetkov, E.; Alekseev, A.; Sikora, A. Investigations on passive channel impulse response of ultra wide band signals for monitoring and safety applications. In Proceedings of the 2016 3rd International Symposium on Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Offenburg, Germany, 26–27 September 2016; pp. 97–104. [Google Scholar]
- Turin, G. An introduction to digitial matched filters. Proc. IEEE 1976, 64, 1092–1112. [Google Scholar] [CrossRef]
- Application Notes, Wireless Sensor Networks and the DW1000. Available online: https://www.decawave.com/wp-content/uploads/2018/10/APS010_DW1000-and-Wireless-Sensor-Networks_v1.1.pdf (accessed on 4 December 2019).
- D’Amico, A.A.; Mengali, U.; Taponecco, L. TOA Estimation with the IEEE 802.15.4a Standard. IEEE Trans. Wirel. Commun. 2010, 9, 2238–2247. [Google Scholar] [CrossRef]
- Wilson, R.; Tse, D.; Scholtz, R.A. Channel Identification: Secret Sharing Using Reciprocity in Ultrawideband Channels. IEEE Trans. Inf. Forensics Secur. 2007, 2, 364–375. [Google Scholar] [CrossRef]
- Molisch, A.F. Ultra-Wide-Band Propagation Channels. Proc. IEEE 2009, 97, 353–371. [Google Scholar] [CrossRef]
- Moulton, J.; Kassam, S.; Ahmad, F.; Amin, M.; Yemelyanov, K. Target and change detection in synthetic aperture radar sensing of urban structures. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- DW 1000 Datasheet. Available online: https://www.decawave.com/sites/default/files/resources/dw1000-datasheet-v2.09.pdf (accessed on 4 February 2020).
- Hamer, M. Scalable Localization and Coordination of Robot Swarms. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2019. [Google Scholar]
- Wu, Y.C.; Chaudhari, Q.; Serpedin, E. Clock Synchronization of Wireless Sensor Networks. IEEE Signal Process Mag. 2011, 28, 124–138. [Google Scholar] [CrossRef]
- Sobhani, B.; Mazzotti, M.; Paolini, E.; Giorgetti, A.; Chiani, M. Effect of state space partitioning on Bayesian tracking for UWB radar sensor networks. In Proceedings of the 2013 IEEE International Conference on Ultra-Wideband (ICUWB), Sydney, NSW, Australia, 15–18 September 2013; pp. 120–125. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches; Wiley-Interscience: Hoboken, NJ, USA, 2006. [Google Scholar]
- Sobhani, B.; Paolini, E.; Giorgetti, A.; Mazzotti, M.; Chiani, M. Target Tracking for UWB Multistatic Radar Sensor Networks. IEEE J. Sel. Top. Sign. Proces. 2014, 8, 125–136. [Google Scholar] [CrossRef]
- Rohling, H. Ordered statistic CFAR technique - an overview. In Proceedings of the 2011 12th International Radar Symposium (IRS), Leipzig, Germany, 7–9 September 2011; pp. 631–638. [Google Scholar]
- Sorkine-Hornung, O.; Rabinovich, M. Least-Squares Rigid Motion Using SVD. Available online: https://igl.ethz.ch/projects/ARAP/svd_rot.pdf (accessed on 4 February 2020).
- DW1000 User Manual. Available online: https://www.decawave.com/dw1000/usermanual/ (accessed on 23 January 2020).
- Wang, X.; Li, T.; Sun, S.; Corchado, J.M. A Survey of Recent Advances in Particle Filters and Remaining Challenges for Multitarget Tracking. Sensors 2017, 17, 2707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tiemann, J.; Wietfeld, C. Scalability, Real-Time Capabilities, and Energy Efficiency in Ultra-Wideband Localization. IEEE Trans. Ind. Inf. 2019, 15, 6313–6321. [Google Scholar] [CrossRef]










| m | |||||||
|---|---|---|---|---|---|---|---|
| 4 | 36 | 4 | 161 | 40 | 0.05 | 0.1 | |
| 0.001 | 4 | 8 | 5 | 1.3 | 10 m s−1 | 1 | 200 |
| transmission time (in network time) |
| device ID |
| device position/location |
| device ID of transmitter of last received message |
| reception time of last received message (in network time) |
| target path location in CIR obtained with transmitter of last received message |
| other payload |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ledergerber, A.; D’Andrea, R. A Multi-Static Radar Network with Ultra-Wideband Radio-Equipped Devices. Sensors 2020, 20, 1599. https://doi.org/10.3390/s20061599
Ledergerber A, D’Andrea R. A Multi-Static Radar Network with Ultra-Wideband Radio-Equipped Devices. Sensors. 2020; 20(6):1599. https://doi.org/10.3390/s20061599
Chicago/Turabian StyleLedergerber, Anton, and Raffaello D’Andrea. 2020. "A Multi-Static Radar Network with Ultra-Wideband Radio-Equipped Devices" Sensors 20, no. 6: 1599. https://doi.org/10.3390/s20061599
APA StyleLedergerber, A., & D’Andrea, R. (2020). A Multi-Static Radar Network with Ultra-Wideband Radio-Equipped Devices. Sensors, 20(6), 1599. https://doi.org/10.3390/s20061599