Feasibility Study on Shear Horizontal Surface Acoustic Wave Sensors for Engine Oil Evaluation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Methods
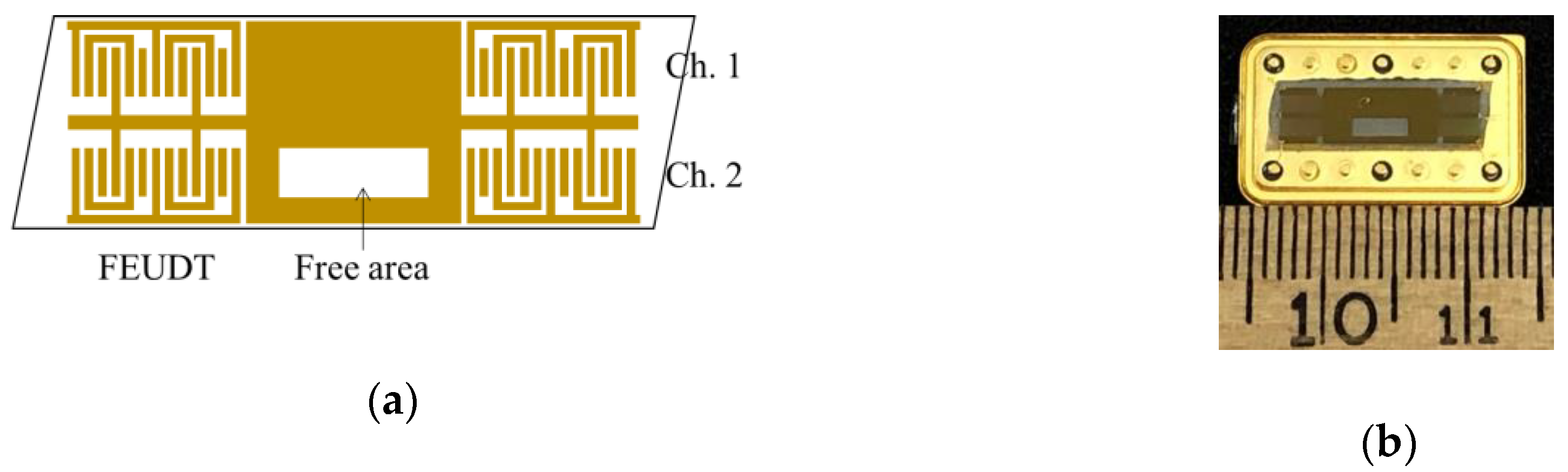
2.1. SH-SAW Sensor
2.2. Measurement System
2.3. Samples
3. Results and Discussion
3.1. Measurements of New and Used Engine Oil
3.2. Influence of the Particles in Engine Oil
3.3. Influence of the Heating
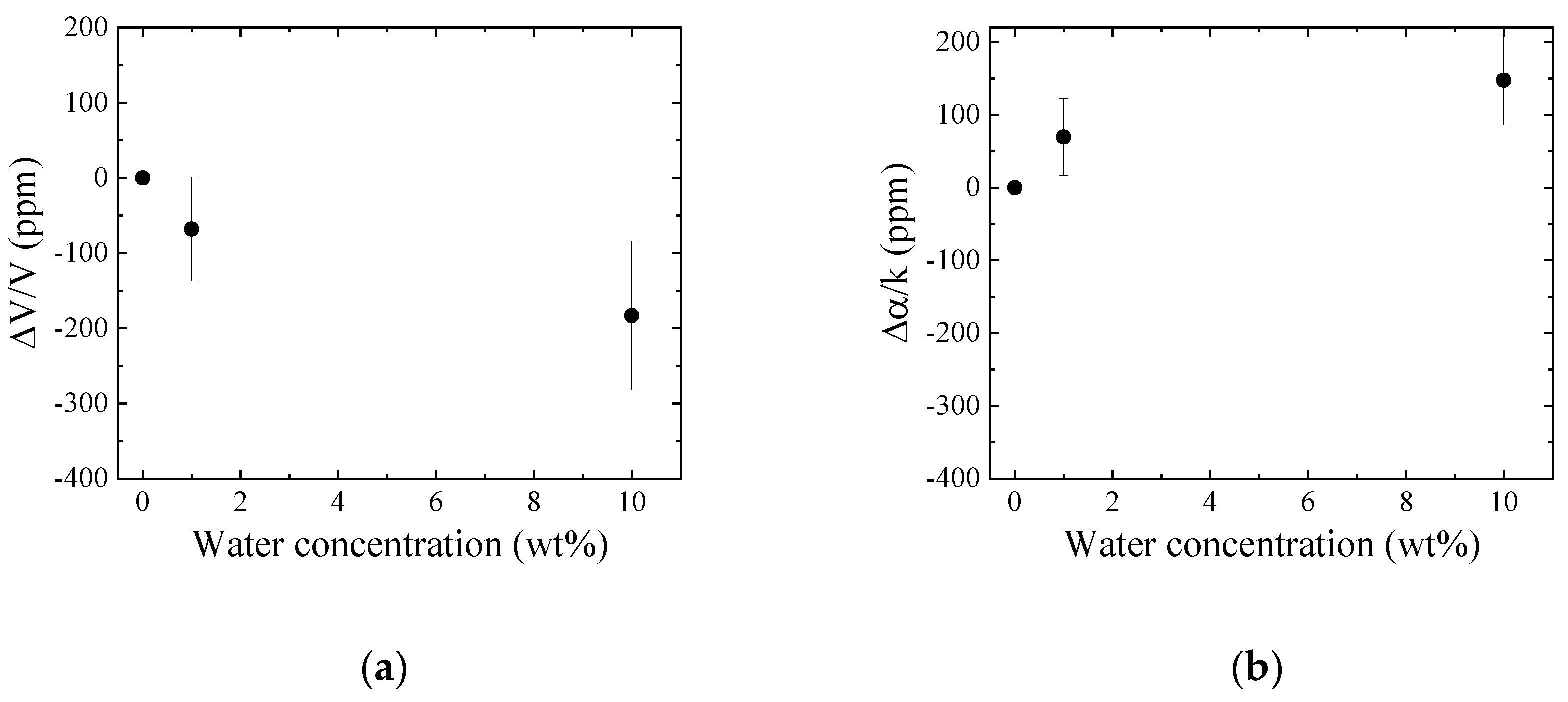
3.4. Influence of the Water Contained in the Oil
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Jakoby, B.; Scherer, M.; Buskies, M.; Eisenschmid, H. An Automotive Engine Oil Viscosity Sensor. IEEE Sens. J. 2003, 3, 562–568. [Google Scholar] [CrossRef]
- Lieberzeit, P.A.; Afzal, A.; Rehman, A.; Dickert, F.L. Nanoparticles for detecting pollutants and degradation processes with mass-sensitive sensors. Sens. Actuators B Chem. 2007, 127, 132–136. [Google Scholar] [CrossRef]
- Ghahrizjani, R.T.; Sadeghi, H.; Mazaheri, A. A Novel Method for on Line Monitoring Engine Oil Quality Based on Tapered Optical Fiber Sensor. IEEE Sens. J. 2016, 16, 3551–3555. [Google Scholar] [CrossRef]
- Rauscher, M.S.; Schardt, M.; Köhler, M.H.; Koch, A.W. Dual-channel mid-infrared sensor based on tunable Fabry-Pérotfilters for fluid monitoring applications. Sens. Actuators B Chem. 2018, 259, 420–427. [Google Scholar] [CrossRef]
- Latif, U.; Najafi, B.; Glanznig, G.; Dickert, F.L. Quality assessment of automotive fuel and oil-improving environmental sustainability. Sens. Actuators B Chem. 2013, 188, 584–589. [Google Scholar] [CrossRef]
- Pérez, A.T.; Hadfield, M. Low-Cost Oil Quality Sensor Based on Changes in Complex Permittivity. Sensors 2011, 11, 10675–10690. [Google Scholar] [CrossRef]
- Kutia, M.; Mukhin, N.; Petrova, H.; Oseev, A.; Bakhchova, L.; Schmidt, M.-P.; Aman, A.; Palis, S.; Tarasov, S.; Hirsch, S. Sensor for the evaluation of dielectric properties of sulfur-containing heteroatomic hydrocarbon compounds in petroleum based liquids at a microfluidic scale. AIP Adv. 2020, 10, 025006. [Google Scholar] [CrossRef]
- Kobayashi, M.; Sun, Z.; Jen, C.K.; Wu, K.T.; Bird, J.; Galeote, B.; Zubair, N. Engine oil condition monitoring using high temperature integrated ultrasonic transducers. In Proceedings of the ASME 2010 Int. Design Engineering Technical Conf. & Comp. and Information in Eng. Conferences, Montreal, QC, Canada, 15–18 August 2010. [Google Scholar]
- Eggly, M.; Tang, T.B. A High Resolution Capacitive Sensing System for the Measurement of Water Content in Crude Oil. Sensors 2014, 14, 11351–11361. [Google Scholar] [CrossRef] [Green Version]
- Eggly, G.M.; Blackhall, M.; de Araújo Gomes, A.; Santos, R.; Ugulino de Araújo, M.C.; Pistonesi, M.F. Emitter/receiver piezoelectric films coupled to flow-batch analyzer for acoustic determination of free glycerol in biodiesel without chemicals/external pretreatment. Microchem. J. 2018, 138, 296–302. [Google Scholar] [CrossRef]
- Kuznetsova, I.E.; Zaitsev, B.D.; Seleznev, E.P.; Verona, E. Gasoline identifier based on piezoactive SH0 plate acoustic waves. Ultrasonics 2016, 70, 34–37. [Google Scholar] [CrossRef]
- Zaitsev, B.D.; Teplykh, A.A.; Borodina, I.A.; Kuznetsova, I.E.; Verona, E. Gasoline sensor based on piezoelectric lateral electric field excited resonator. Ultrasonics 2017, 80, 96–100. [Google Scholar] [CrossRef] [PubMed]
- Kondoh, J.; Shiokawa, S. Shear surface acoustic wave liquid sensor based on acoustoelectric interaction. Electron. Commun. Jpn. Part 2 1995, 78, 101–112. [Google Scholar] [CrossRef]
- Morita, T.; Sugimoto, M.; Kondoh, J. Measurements of standard viscosity liquids using shear horizontal surface acoustic wave sensors. Jpn. J. Appl. Phys. 2009, 48, 07GG15. [Google Scholar] [CrossRef] [Green Version]
- Kondoh, J. A Liquid-Phase Sensor Using Shear Horizontal Surface Acoustic Wave Devices. Electron. Commun. Jpn. 2013, 96, 41–49. [Google Scholar] [CrossRef]
- Kobayashi, S.; Kondoh, J. Properties of engine oil measured using a surface acoustic wave sensor. Jpn. J. Appl. Phys. 2018, 57, 07LD09. [Google Scholar] [CrossRef]
- Auld, B.A. Acoustic Fields and Waves in Solids, 2nd ed.; Chap. 12; Krieger Publishing Co.: Malabar, FL, USA, 1990; Volume 2. [Google Scholar]
- Shana, Z.A.; Josse, F. Quartz Crystal Resonators as Sensors in Liquids Using the Acoustoelectric Effect. Anal. Chem. 1994, 66, 11955–11964. [Google Scholar] [CrossRef]
- Mitsakakis, K.; Tsortos, A.; Kondoh, J.; Gizeli, E. Parametric study of SH-SAW device response to various types of surface perturbations. Sens. Actuators B Chem. 2009, 138, 408–416. [Google Scholar] [CrossRef]
- Yamanouchi, K.; Furuyashiki, H. New low-loss SAW filter using internal floating electrode reflection types of single-phase unidirectional transducer. Electron. Lett. 1984, 20, 989–990. [Google Scholar] [CrossRef]
- MacLeod, S.K. Moisture determination using Karl Fischer titrations. Anal. Chem. 1991, 63, 557A–566A. [Google Scholar] [CrossRef]
- Nomura, T.; Saitoh, A.; Tokuyama, H. Wireless sensor using surface acoustic wave. In Proceedings of the World Congress on Ultrasonics, Paris, France, 7–10 September 2003. [Google Scholar]
- Campbell, J.J.; Jones, W.R. A Method for Estimation Optimal Crystal Cuts and Propagation Directions for Excitation of Piezoelectric Surface Waves. IEEE Trans. Sonics Ultrason. 1969, 15, 209–217. [Google Scholar] [CrossRef]
- Yamanouchi, K.; Shibayama, K. Propagation and Amplification of Rayleigh Waves and Piezoelectric Leaky Surface Waves in LiNbO3. J. Appl. Phys. 1972, 43, 856–862. [Google Scholar] [CrossRef]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kobayashi, S.; Kondoh, J. Feasibility Study on Shear Horizontal Surface Acoustic Wave Sensors for Engine Oil Evaluation. Sensors 2020, 20, 2184. https://doi.org/10.3390/s20082184
Kobayashi S, Kondoh J. Feasibility Study on Shear Horizontal Surface Acoustic Wave Sensors for Engine Oil Evaluation. Sensors. 2020; 20(8):2184. https://doi.org/10.3390/s20082184
Chicago/Turabian StyleKobayashi, Saya, and Jun Kondoh. 2020. "Feasibility Study on Shear Horizontal Surface Acoustic Wave Sensors for Engine Oil Evaluation" Sensors 20, no. 8: 2184. https://doi.org/10.3390/s20082184
APA StyleKobayashi, S., & Kondoh, J. (2020). Feasibility Study on Shear Horizontal Surface Acoustic Wave Sensors for Engine Oil Evaluation. Sensors, 20(8), 2184. https://doi.org/10.3390/s20082184