1. Introduction
The centrifugal pump, as one type of fluid transport machinery, plays an important role in process industries, such as those of power, metallurgy, mining, and building, etc. A centrifugal pump belongs to a rotodynamic pump that drives fast-rotating impellers to provide transported fluids with a high pressure and high speed. Then, the driven fluids rush outward into a diffuser or volute chamber, and exit into the downstream piping system. These complex working conditions will inevitably cause cavitation-related injury directly on pump impellers and shorten the life-span. Cavitation is a physical phenomenon in which pressure differentials within flowing liquids can quickly lead to the massive formation of vapor-filled cavities or bubbles [
1,
2,
3]. The energy released by bubble collapse will suddenly damage pump assets and peripherals, such as blades, seals, valves, pipelines, etc. With cavitation fast evolving from bubbles to clouds, it will generate harmful vibration and impulsive noise, and then cause blade erosion and seal damage, thus seriously restricting the pump efficiency and shortening the life-span for a long run. As a consequence, such cavitation failure of critical pumps will result in costly downtime, system failure, and fatal accidents for all process industries.
From the perspective of predictive maintenance, it is highly necessary to detect incipient cavitation before cavitation clouds cause irreversible damage [
4]. It is also very much expected that intelligent approaches to diagnose and predict the cavitation evolution when the pumps are running will be developed. However, challenges with regards to this still exist [
5]. Firstly, in the early stage of pump cavitation, it is not easy to observe any apparent symptom, such as pressure fluctuation, head drop, strong vibration, or noise induced by incipient cavitation. Moreover, cavitation evolution is affected by many kinds of excitation sources inside kinetic flows. Therefore, the cavitation-induced signal is always modulated by various excitation components around rotating impellers and is inherently accompanied by strong background noise during pump operation.
Since the cavitation phenomenon is generally a non-stationary process, many researchers have tried multimodal sensing and innovative signal-processing in cavitation detection. He and Liu [
6] carried out experimental research on the time-frequency characteristics of cavitation noise using a wavelet scalogram. Additionally, Asish et al. [
7] used support vector machine (SVM) algorithms to predict flow blockages and impending cavitation in centrifugal pumps. Furthermore, Bao et al. [
8] proposed a modified Empirical Mode Decomposition (EMD) technique by estimating the local mean of cavitation-related signals via the windowed average. This method effectively alleviated the unfavorable influence of noise disturbance and yielded an improvement in signal modulation extraction. Song et al. [
9] proposed a novel demodulation method for rotating machinery based on time-frequency analysis and principal component analysis (PCA), as well as other extended methods in [
10,
11]. The demodulation method can be applied for the cavitation detection of ship propellers, which is a kind of axial pump cavitation. Stopa et al. [
12] proposed Load Torque Signature Analysis by employing electrical signals from the motor to estimate pump torque and to determine the cavitation occurrence and intensity through spectrum information. Sun et al. [
13] conducted cavitation experiments and Hilbert–Huang Transformation (HHT) on vibration and current signals. The root mean square of the Intrinsic Mode Function (IMF) in the current signal is sensitive to cavitation. They [
14] also proposed a cyclic spectral analysis of vibration signals for the fault characterization of centrifugal pump cavitation. Zhou and Lu [
15] proposed a multi-point noise analysis method to study cavitation noise, and used the second-generation wavelet to extract the noise energy spectrum of each microphone point, before combining the sensitive frequency bands of all measuring points to form the eigenvector and to train the Back Project (BP) network. Ramadevi [
16] proposed a discrete wavelet algorithm based on db4 wavelet decomposition. By employing five-level decomposition, the various components of wavelet coefficients in each layer were obtained to detect the cavitation status. McKee et al. [
17] used statistical methods, such as adaptive frequency band analysis and PCA, to extract the vibration characteristics of cavitation failure. Moreover, Dario et al. [
18] employed accelerometer time-series analysis based on an auto-regressive and moving average (ARMA) method to determine the pump cavitation.
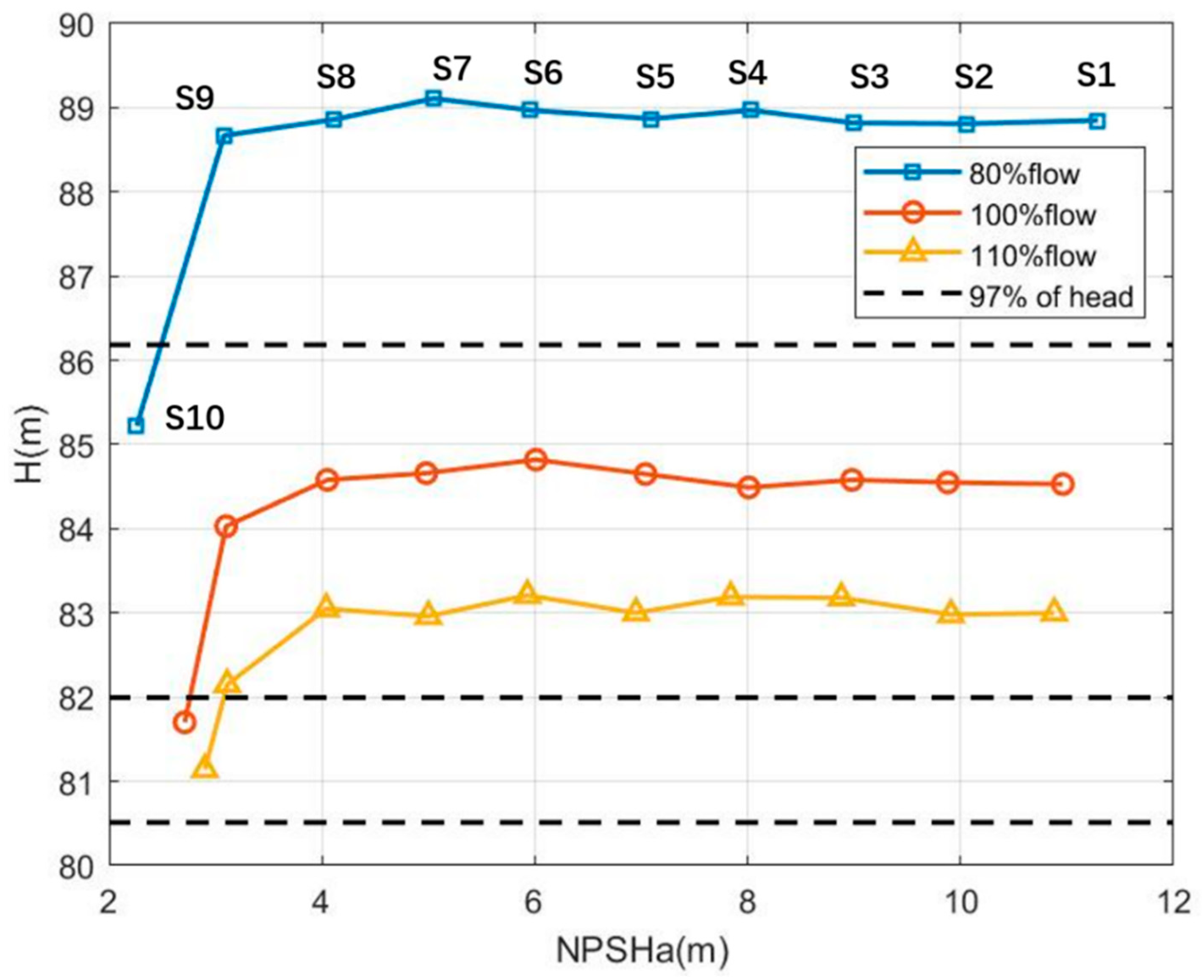
All of the above methods have successfully monitored and detected cavitation failure, but few of them can produce early warnings of incipient cavitation, and more importantly, they can hardly maintain a low probability of false alarm for the process industry requirement. According to the testing standards of centrifugal pumps, such as ANSI/HI9.6.1, ISO9906-2012, and ANSI/API610, a cavitation problem cannot be confirmed unless the inlet flow at the testing point remains steady and the output head drops by 3% of the original value. However, this evidence cannot be used to predict incipient cavitation, because, at the very beginning of cavitation occurrence, there are no distinct changes in head drop or efficiency loss. Moreover, other symptoms, such as strong vibration and impulsive noise, are not very noticeable during incipient cavitation. As long as the output head drops by 3% and the efficiency falls, although abnormal noise and vibration are visible, pump cavitation has already reached a serious status. In addition, the boundary between different cavitation statuses is not distinct. These are the reasons why it is difficult for most of the aforementioned state-of-the-art methods to detect incipient cavitation during pump operation.
To overcome the above difficulties in incipient cavitation detection, some researchers have improved spectral kurtosis methods that measure the intensity of the transient impact caused by cavitation bubble collapse. An early version of spectral kurtosis was first introduced by Dwyer [
19], but not in the field of gear box diagnosis. In later research, a refined version was successfully proposed by Antoni and Randall [
20], and was thus widely applied in many fields of rotary machine diagnosis [
21,
22]. Kurtosis is defined as the measure of thickness or heaviness of the random variable distribution along its tail. According to the kurtosis value, the distribution can be classified into three categories. The distribution with kurtosis equal to 3 is known as mesokurtic, such as a normal distribution. If the kurtosis is less than 3, the distribution is called platykurtic, and has a shorter and thinner tail and a lower and broader peak compared to a normal distribution. If the kurtosis is greater than 3, the distribution is leptokurtic, and has a longer and fatter tail and a higher and sharper peak than those of a normal distribution. In general, the stronger the transient impact of the signal, the greater its kurtosis becomes. In 2006, Antoni [
23] developed Spectral Kurtosis (SK) based on improved time-frequency analysis. SK has since become one of the dominant methods used to demodulate the spectrum band in which the envelope signal has the maximum impulsivity or kurtosis value. All the values of SK for each central frequency and related spectrum band can be shown defectively in a colorful 2D map called a Kurtogram. For industry application, Fast Kurtogram (FK) was further proposed by Antoni [
24] based on a multirate filter-bank, in order to simplify the complex computation of the conventional Kurtogram. Nowadays, SK is widely used to diagnose bearing faults, gear box failure, and engine deficiency. For the presence of strong noise, an improved Kurtogram was proposed by Lei et al. [
25] based on Wavelet Packet Transform (WPT) to enhance the spectrum resolution of transient impulses. However, there is little literature [
8,
12] reporting Kurtogram-based methods used to detect pump incipient cavitation. This is because a Kurtogram cannot precisely estimate the kurtosis values of cavitation signals involving repetitive impacts. The spectral Kurtosis performance declines in the case of a low signal-to-noise ratio (SNR), or in the presence of non-Gaussian noise. Unfortunately, these aforementioned cases commonly exist within the cavitation phenomenon.
To improve the Kurtogram performance against intense impulses of cavitation, several innovative methods have recently been exploited, such as the Protrugram, Infogram, and Autogram. Barszcz et al. [
26] argued that the Kurtogram fails to identify repetitive transients, since the kurtosis value of the Kurtogram decreases with the increase of impulse repetition. To overcome this drawback, they proposed the Protrugram to use the kurtosis of the envelope spectrum, rather than the kurtosis of the filtered signal. However, the Protrugram has to fix the demodulation bandwidth and needs to know defect frequencies, which restricts its application. To extend the Kurtogram robustness against repetitive impacts, Antoni [
27] proposed the Infogram to measure both the negentropy of the square-envelope (SE) of a signal with repetitive transients, and the negentropy of the SE spectrum of the same signal. Therefore, the Infogram is able to capture the signature of repetitive transients in both time and frequency domains. Due to the complexity of the Infogram, the Autogram was recently proposed to combine the autocorrelation, kurtosis, and other statistics, in order to analyze the intensive impacts and cyclic components of cavitation-related signals [
28]. It has displayed a good performance in the fault diagnosis of rotating machinery with strong impulsive interference. Different from the Kurtogram, the Autogram calculates the kurtosis of signal autocorrelation and attenuates the interference, such as random striking and non-Gaussian noise, so that it can enhance the feature extraction of fault information from cyclic frequencies and resonant spectrum bands. Furthermore, the Maximum Overlapping Discrete Wavelet Packet Transform (MODWPT) [
28] in the Autogram overcomes the sensitivity of wavelet coefficients in the selection of the starting point of time series. Moreover, the Autogram employs the combined square-envelope spectrum (CSES) to extract more cyclic harmonics than the spectral kurtosis (SK) of the Kurtogram. However, few Protrugram-, Infogram-, and Autogram-based methods have been applied in pump incipient cavitation detection.
For industry applications, the frequent misjudgment of cavitation occurrence in critical pumps will interrupt the continuous operation, reduce the working productivity, and increase maintenance workloads. To avoid an unnecessarily high false alarm, the Constant False Alarm Rate (CFAR) detector can be used to reduce frequent misjudgments and improve the detection rate, since the CFAR threshold can adaptively increase or decrease in proportion based on the power level of background noise. More importantly, the CFAR threshold can conduct self-regulation according to various noise distributions, so the CFAR detector has been widely developed for radar signal detection against complicated background clutters [
29,
30,
31]. Barkat et al. [
29] employed the CFAR to automatically detect a target in a nonstationary clutter background. They pointed out that classical detection using a matched filter receiver and a fixed threshold was not applicable due to the nonstationary nature of the background noise. Therefore, adaptive threshold techniques are needed to maintain a constant false alarm rate. In cell-averaging CFAR processing, an estimate of the background noise from the leading and lagging reference windows is used to set the adaptive threshold. Lehtomaki et al. [
30] combined false alarm probability-based forward methods with the cell-averaging CFAR technique to locate the outliers, and a threshold multiplier was used to scale the threshold to achieve the desired probability of a false alarm.
Therefore, this paper mainly focuses on incipient cavitation detection. Our aim is to try to provide informed decision-making and strengthen predictive maintenance in real-time. In particular, it is key to recognize incipient cavitation through a high detection rate and low false alarm. Therefore, this paper proposes a cyclic amplitude model (CAM) to reveal the cyclostationarity and autocorrelation-periodicity of pump cavitation-caused signals. In addition, the Autogram method is improved for envelope demodulation and feature extraction by introducing the character to noise ratio (CNR) and CFAR threshold.
There are two main contributions presented in this paper. To achieve a high detection rate, the improved Autogram introduces the character to noise ratio (CNR) to monitor cavitation-caused noises in the combined square-envelope spectrum (CSES). Moreover, to maintain a low false alarm, the proposed CNR parameter employs the CFAR detector to obtain adaptive thresholds in data processing from different sensor positions around one testing pump. By carrying out various experiments of a centrifugal water pump from Status 1 to Status 10 at different flow rates, the proposed approach is capable of extracting CSES features with respect to the CAM model, achieving more than a 90% detection rate of incipient cavitation, and maintaining a false alarm rate as low as 5%. In brief, this paper proposes an adaptive Autogram approach based on the CFAR criterion for pump incipient cavitation detection. The proposed approach is able to improve the detector robustness in pump cavitation diagnosis.
The structure of this paper is organized as follows:
Section 2 will introduce the cyclic amplitude model of cavitation-caused signals. In
Section 3, an Autogram method is compared with the Kurtogram, and the feature parameter CNR and its CFAR detector will be presented in detail.
Section 4 will introduce the experimental setup of the centrifugal water pump at 80%, 100%, and 110% flow rates, respectively. Vibration signals are collected by eight accelerometers. In
Section 5, the proposed CNR and CFAR thresholds will first be trained and selected by using cavitation data from Sensor 15, and then successfully applied to detect incipient cavitation measured at Sensor 17 and 19. Finally,
Section 6 concludes this paper and gives perspectives.
2. Modeling Difficulty
The modeling difficulty is that the measured pump cavitation-caused signal is time-varying, impulsive, and modulated by impeller rotation. Such a complicated signal has a deceptive spectrum consisting of informative cyclic components at low- and mid-frequencies, as well as amplified continuous bands at high frequencies. However, the measured pump cavitation-caused signal can still be modeled by using non-stationary statistics. Additionally, cavitation-caused vibration or acoustic signals can be approximated by cyclostationary modeling [
32,
33]. Owing to the rotation and reciprocation of mechanical equipment, their vibration and acoustic signals inherently exhibit cyclic stationary (cyclostationary) characteristics [
33,
34]. In centrifugal pumps, cavitation bubbles occur, agglomerate, and congest between inlet suck and rotating impellers [
35,
36]. The faster the impeller runs, the faster the cavitation evolves, and the stronger the cavitation-caused signal becomes. Since many excitation sources inside pump flows cause complex modulation effects, a cyclic amplitude modulation (CAM) model to describe the measured pump cavitation-caused signal can be expressed as
where the first bracket
plays a role in amplitude modulation or the signal envelope, and
is the discrete frequency or cyclic frequency, including the shaft-rotating frequency (SF) of the pump and blade-passing frequency (BF) of the impeller, as well as their harmonics (2× SF, 3× SF etc. and 2× BF, 3× BF etc.) and coincidence frequencies;
is the amplitude of the cyclic frequency component; the second bracket
plays the role of a signal carrier caused by unsteady flow along the pump impeller
can be excited by fluid-solid coupling, whose spectrum contains resonant frequencies;
are the frequency, amplitude, and initial phase, respectively, which are also influenced by the cavitation intensity; and
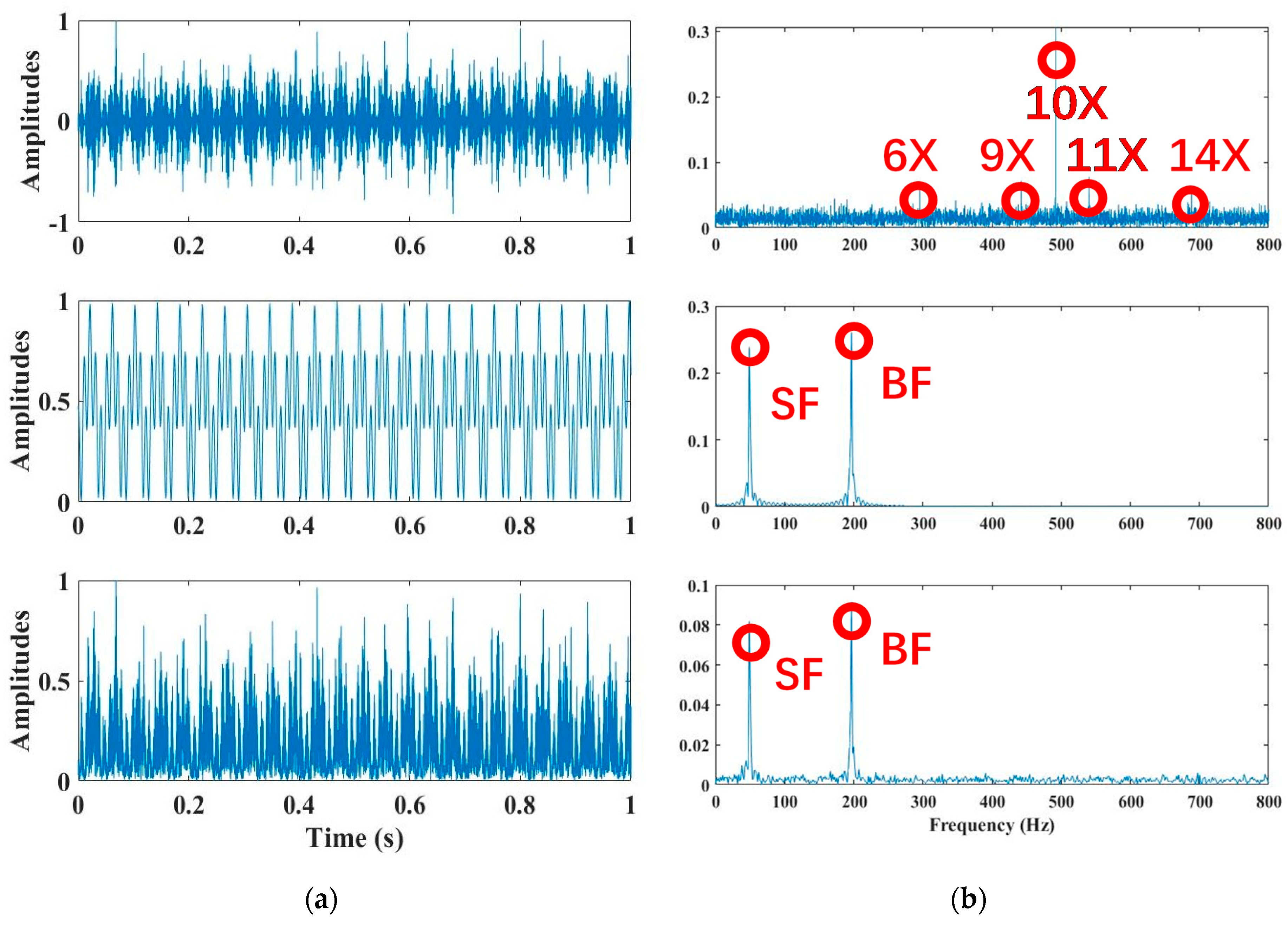
is a random process which depends on the cavitation evolution and is mainly generated by cavitation bubble collapses consisting of repetitive impulses, accompanied by Gaussian and non-Gaussian noise. One example of simulated signals based on the proposed CAM model is demonstrated in
Figure 1. Compared with the square-envelope signal in
Figure 1 (bottom), the instantaneous autocorrelation function (
Figure 1 middle) is more likely a periodic signal, and the autocorrelation spectrum has a very good resolution of cyclic frequencies such SF and BF, and noise suppression is better than the square-envelope spectrum (SES) of the simulated CAM signal. Both autocorrelation and SES can reveal more cyclic frequency components than the power spectrum (
Figure 1 top).
As shown in Equation (1) and
Figure 1, the proposed CAM model tries to provide insights on the mechanism of cavitation occurrence, and presents a principle to identify the incipient cavitation by extracting characteristics from measured cavitation-based signals. When there is no cavitation, the envelope spectrum of the proposed CAM model mainly contains two parts, such as cyclic frequencies and wide-band noise. The former part can monitor the actual parameters of the pump operation, such as the shaft-rotating frequency, blade-passing frequency, their harmonics and coincidence frequencies, and motor electromagnetic frequencies. The latter part is induced by steady flow inside the pump, and its spectrum strength can reflect the flow distribution. When cavitation bursts out, due to the intensive collapse of many small bubbles, wide-band noise in the second part of the CAM model expands its spectrum into lower and higher frequency regions. Meanwhile, the noise spectrum amplitude will be amplified over the entire band, especially at high frequencies. In this way, the incipient cavitation can be detected if some of the cyclic frequency components in the high frequency band begin to be submerged by the arising noise spectrum. Moreover, the noise spectrum distribution can be affected by noise clutters, which are caused by the flow heterogeneity around cavitation bubbles. With bubbles rapidly developing, the bubble conglomeration and explosion will definitely lead to unsteady flows, which will probably result in nonuniform forces on pump impellers. Considering this, problems such as rotor imbalance and impeller damage, and even seal leakage bursting out, can occur due to violent cavitation. Therefore, it is highly necessary to find an effective method of incipient cavitation detection, in order to reduce pump damage and avoid performance deterioration.
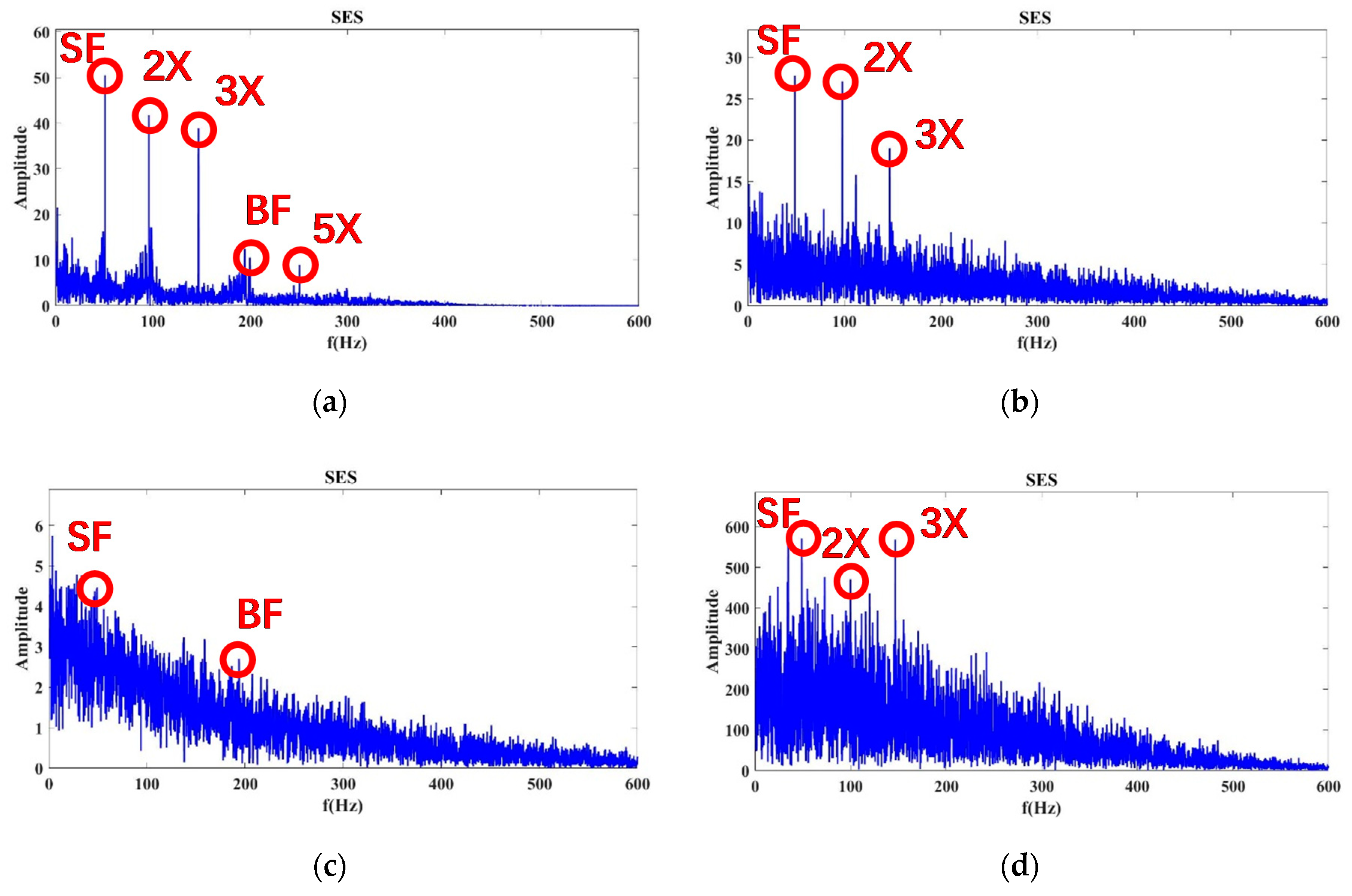
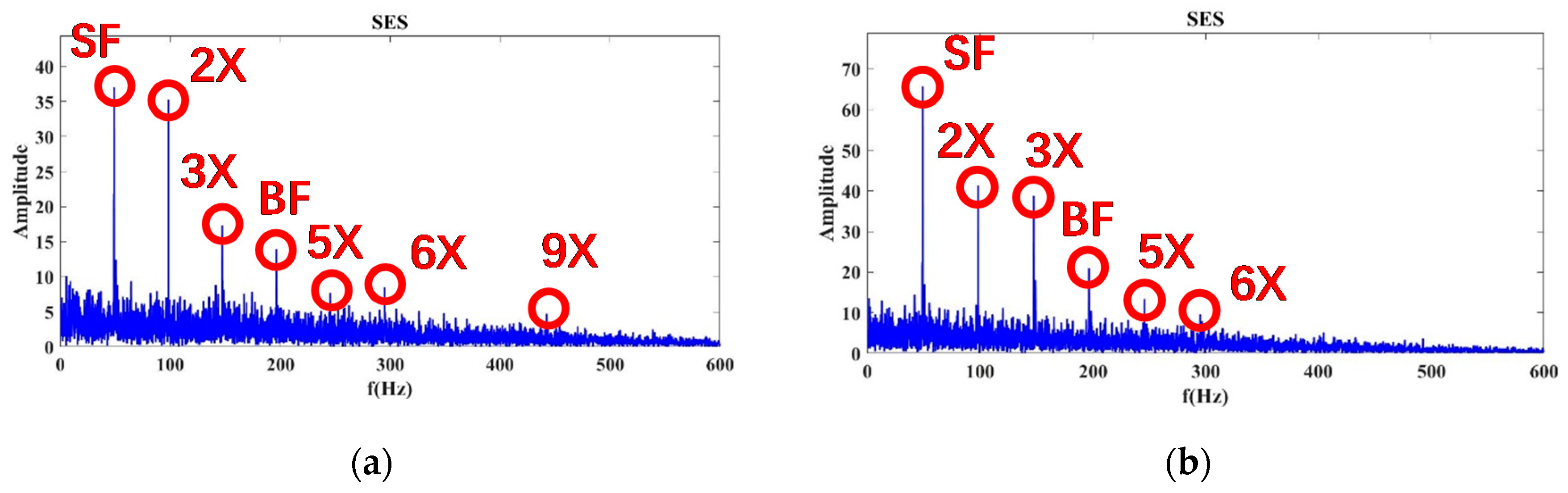
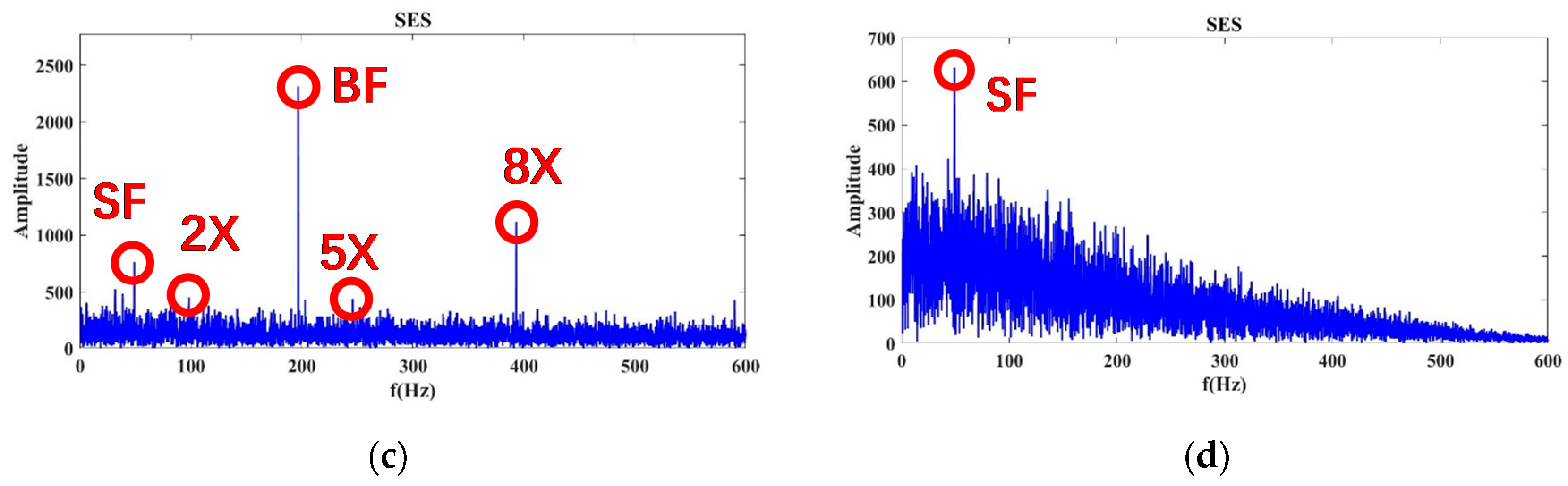
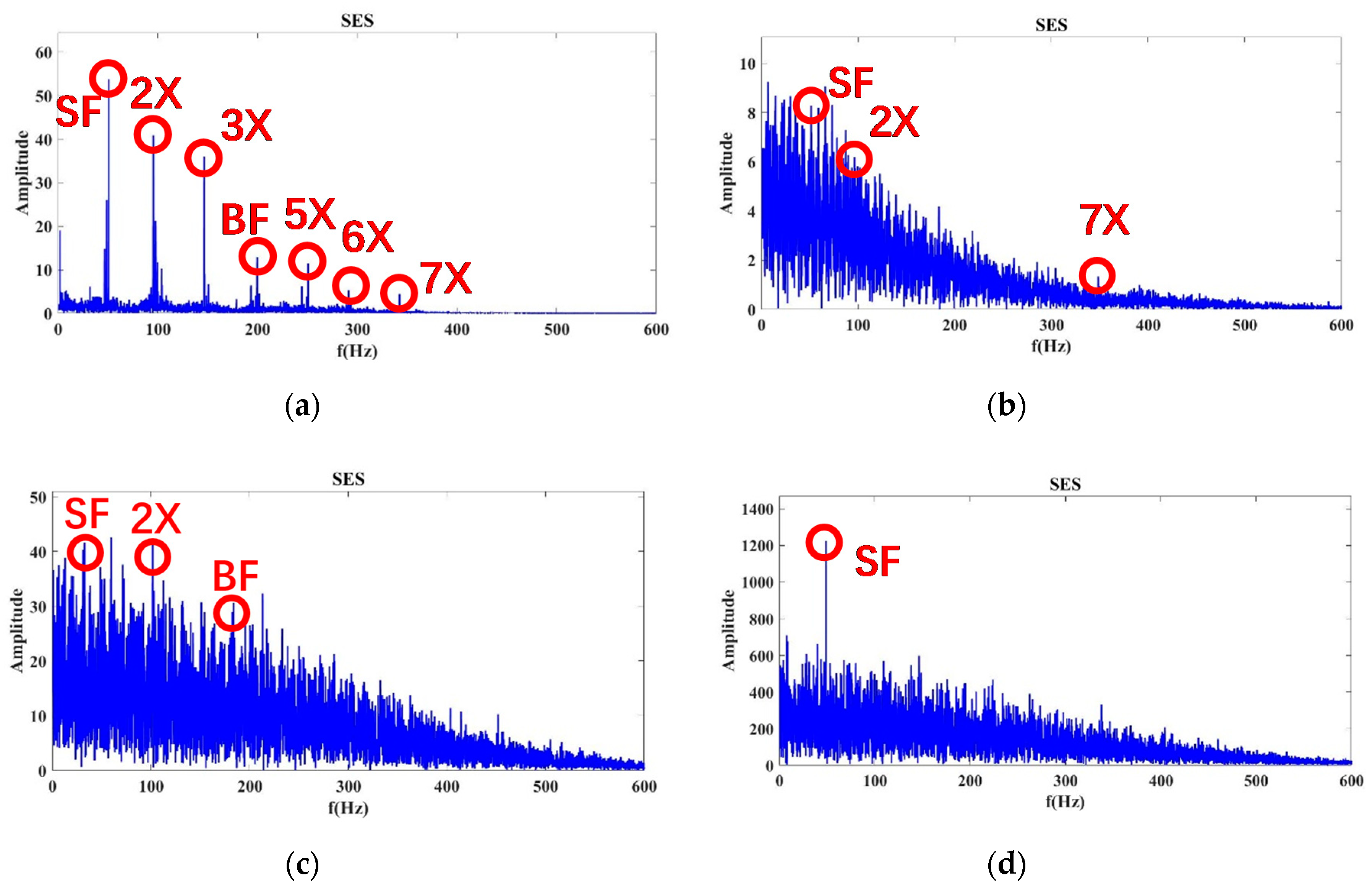
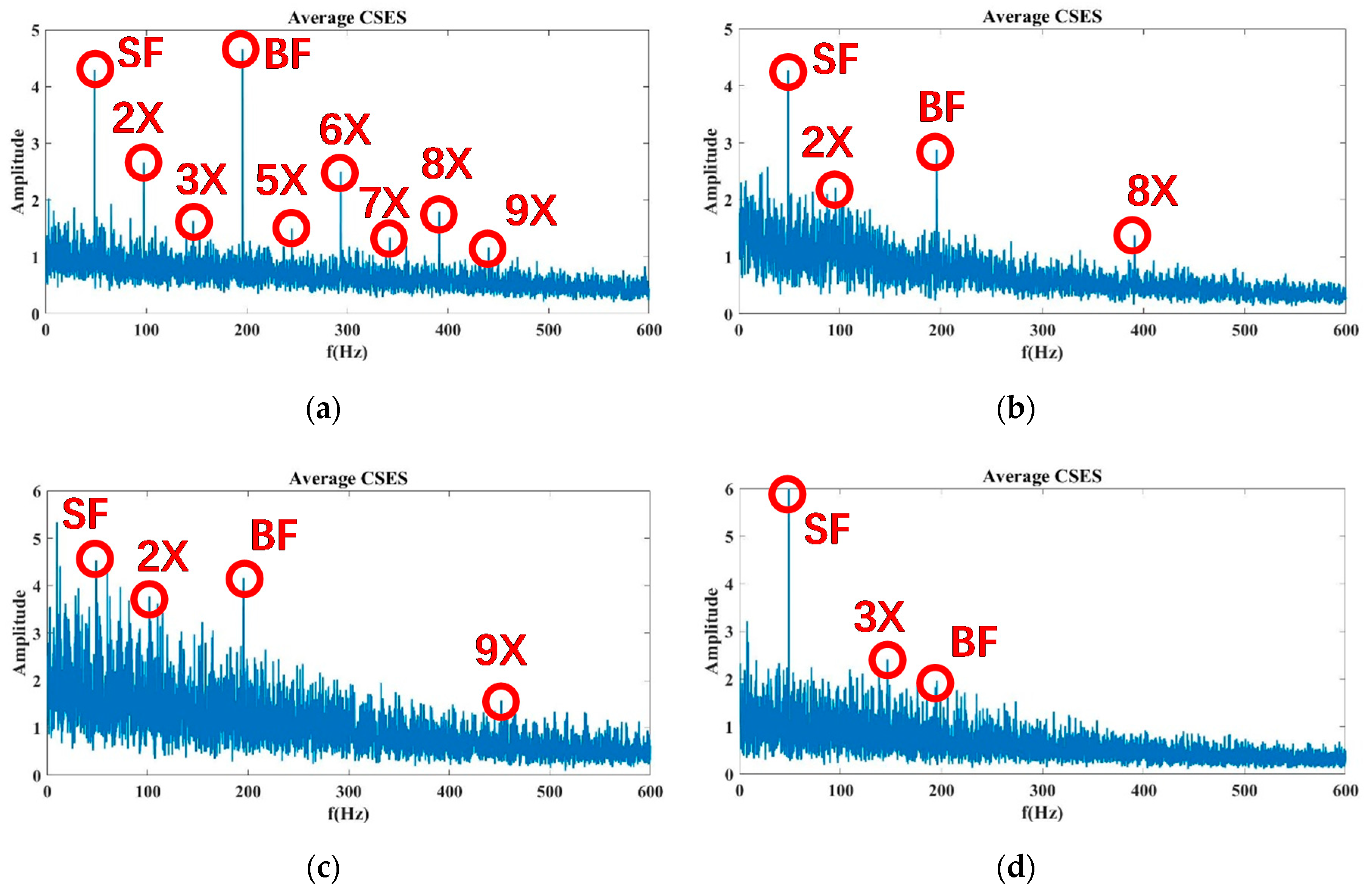
In brief, without cavitation, the autocorrelation spectrum (or SES) characteristics of the proposed CAM model would be a family of comb components across the continuous spectrum, in which principal cyclic components (SF, BF, and their harmonics) sparsely distribute along low and middle frequencies, and a smooth carrier occupies high frequency bands. With cavitation occurring, some of the high-order harmonics of SF and BF begin to be buried by cavitation-caused noise in the high frequency band, while most of the cyclic components in the low and middle frequency band are the same as those without cavitation. However, severe cavitation would probably make noise clutters so intensive that most of the harmonic components become buried, even the BF, along the entire frequency band. Although SF and its low-order harmonics might be enhanced due to the blade imbalance problem caused by severe cavitation, there will no longer be a family of comb components across the continuous spectrum. The aforementioned features will be seen in the figures from the
Section 3.1,
Section 5.1 and
Section 5.2, respectively.
6. Conclusions
Detecting cavitation occurrence during pump operation has significantly contributed to erosion prevention and predictive maintenance. However, most of the aforementioned state-of-the-art methods can hardly produce early warnings of incipient cavitation, and more importantly, can seldom guarantee a low rate of false alarm.
In this paper, an adaptive Autogram approach based on the Constant False Alarm Rate (CFAR) criterion has been proposed and validated for pump incipient cavitation detection. A cyclic amplitude model (CAM) has been presented to reveal the cyclostationarity and autocorrelation-periodicity of pump cavitation-caused signals. Then, the Autogram method has been improved for envelope demodulation and feature extraction by introducing the character to noise ratio (CNR) and CFAR threshold, which have been mathematically expressed by five steps in
Section 3.1. To achieve a high detection rate, the improved Autogram introduces the CNR parameter to monitor cavitation-caused noises in the combined square-envelope spectrum (CSES) of pump vibrational acceleration signals. Moreover, to maintain a low false alarm, the proposed CNR parameter employs the CFAR detector to obtain adaptive thresholds in data processing from different sensor positions around one testing pump. By carrying out various experiments of a centrifugal water pump at 10 levels of cavitation intensities at different flow rates, the proposed approach is capable of extracting CSES features with respect to the CAM model, achieving more than a 90% detection rate of incipient cavitation, and maintaining a false alarm rate as low as 5%. The proposed approach is able to avoid missing detection and improve the detector robustness in pump cavitation diagnosis.
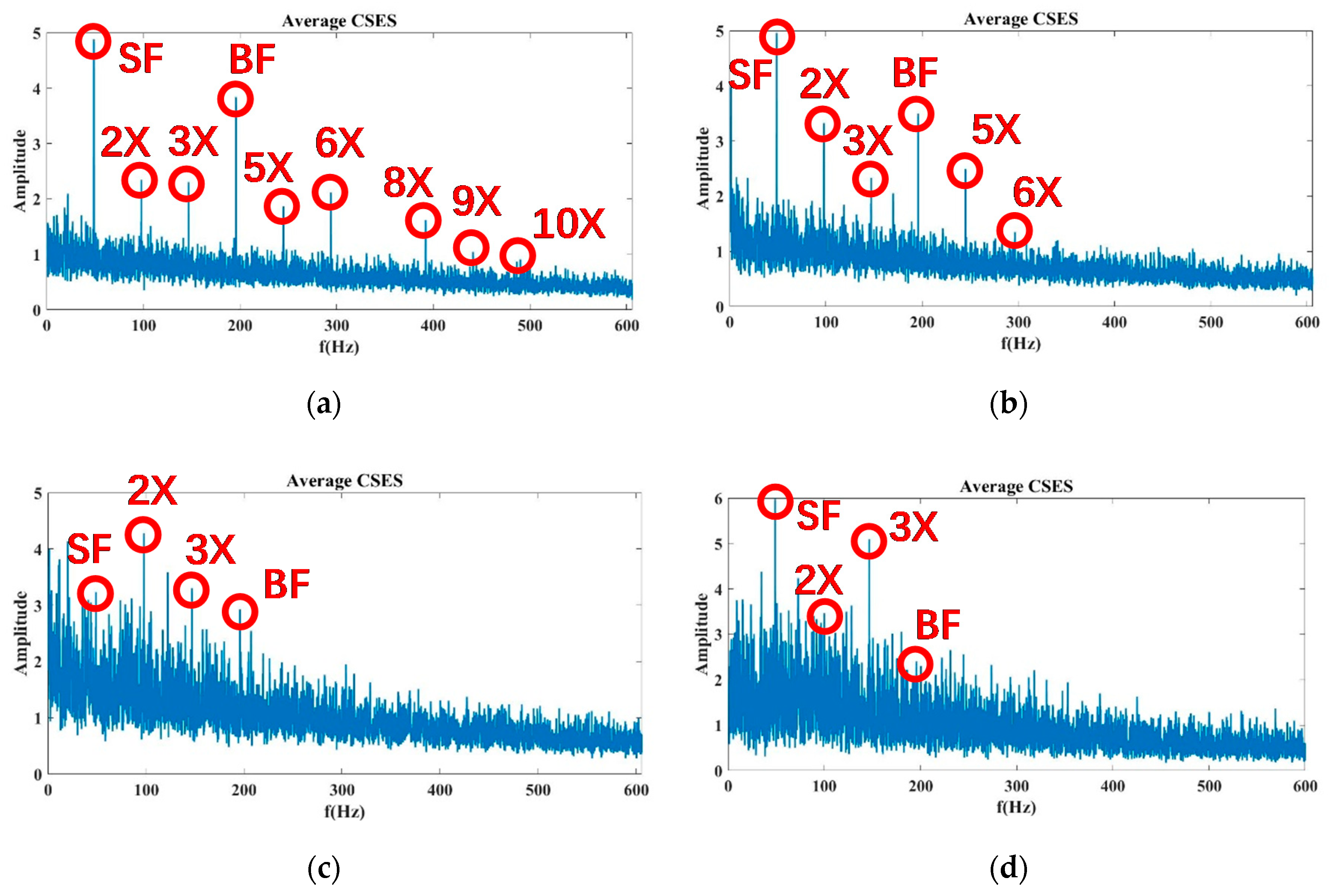
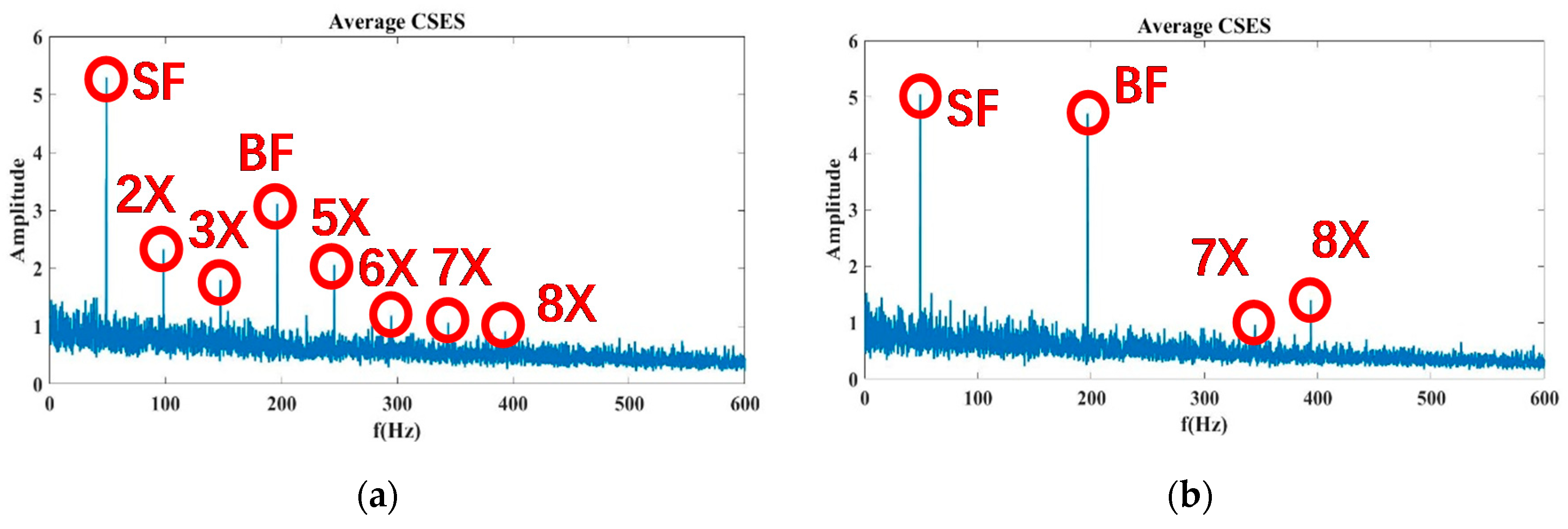
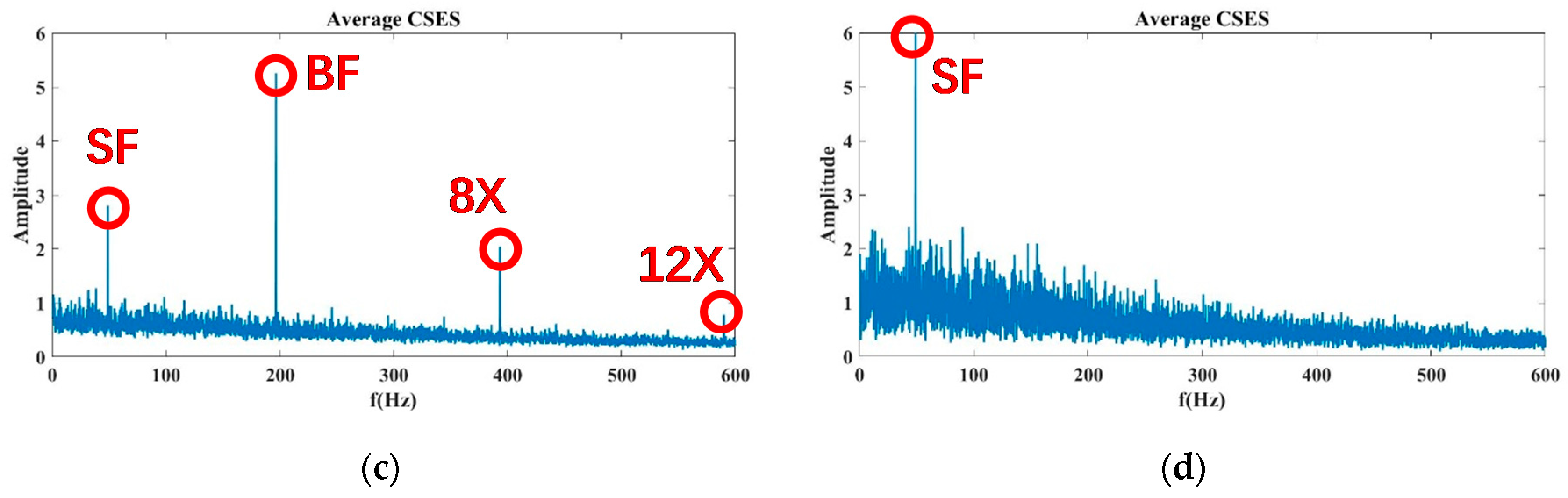
For the modeling of pump cavitation-caused signals, although it is time-varying, impulsive, and modulated by impeller rotation, the proposed CAM model is capable of reflecting the CSES characteristics of autocorrelation as follows: (1) CSES without cavitation: a family of comb components across the continuous spectrum, in which principal cyclic components (SF, BF, and their harmonics) sparsely distribute along low and middle frequencies, and a smooth carrier occupies high-frequency bands; (2) CSES with incipient cavitation: some high-order harmonics of SF and BF begin to be buried by cavitation-caused noise; (3) CSES with severe cavitation: noise clutters produced are so intensive that most of the harmonic components, even the BF, are buried. Additionally, there is no longer a family of comb components across the continuous spectrum. All these characteristics have been shown in
Figure 1,
Figure 3, and
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13, and validated by real data of pump cavitation vibrations.
For the proposed CNR parameters to feature extraction, informative characteristic frequencies are selected through the combination of WT and PCA results, so that the ensemble
of the indice of characteristic frequencies can be determined from the SES or average CSES. Therefore, the proposed CNR parameters can be calculated adaptively by updating data from different sensors at various flow rates. All these features have been validated in
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13.
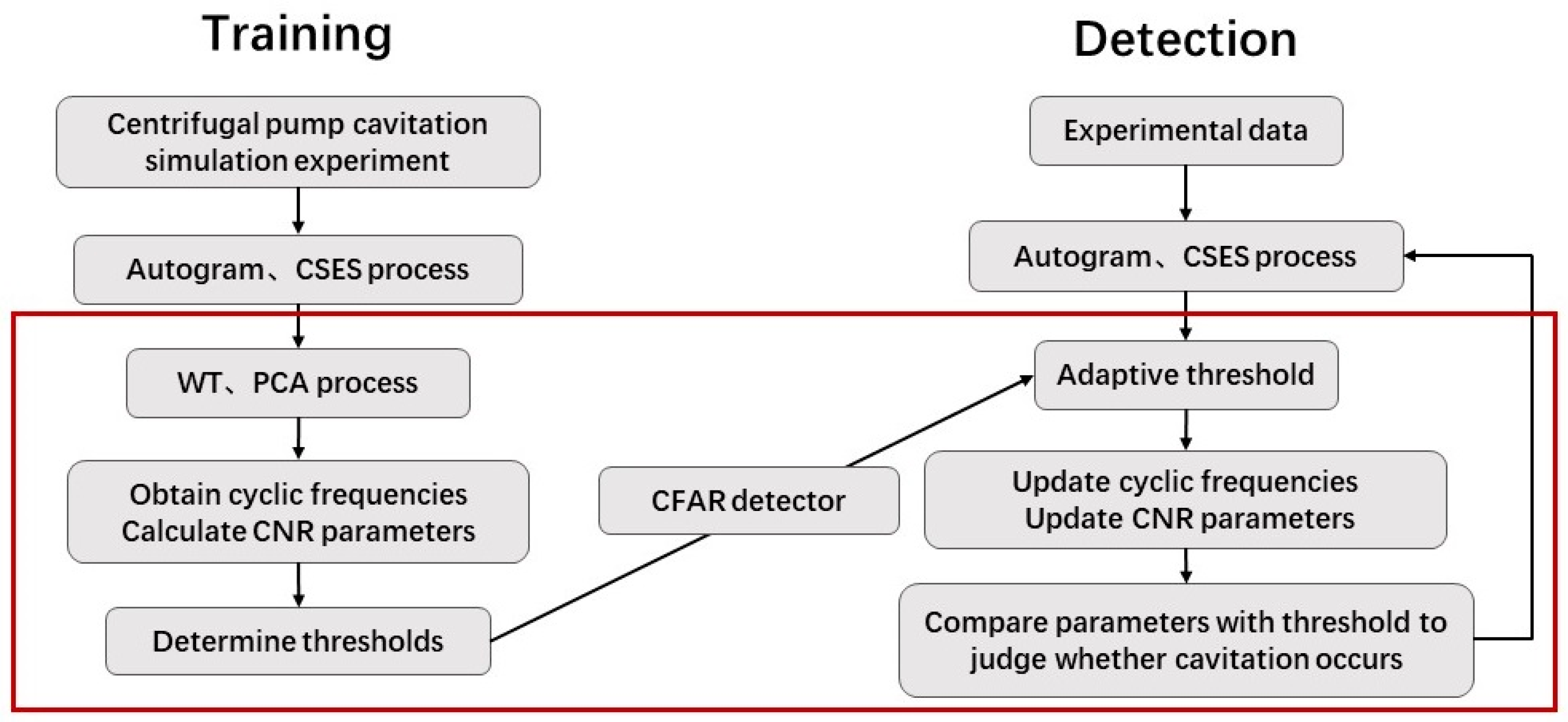
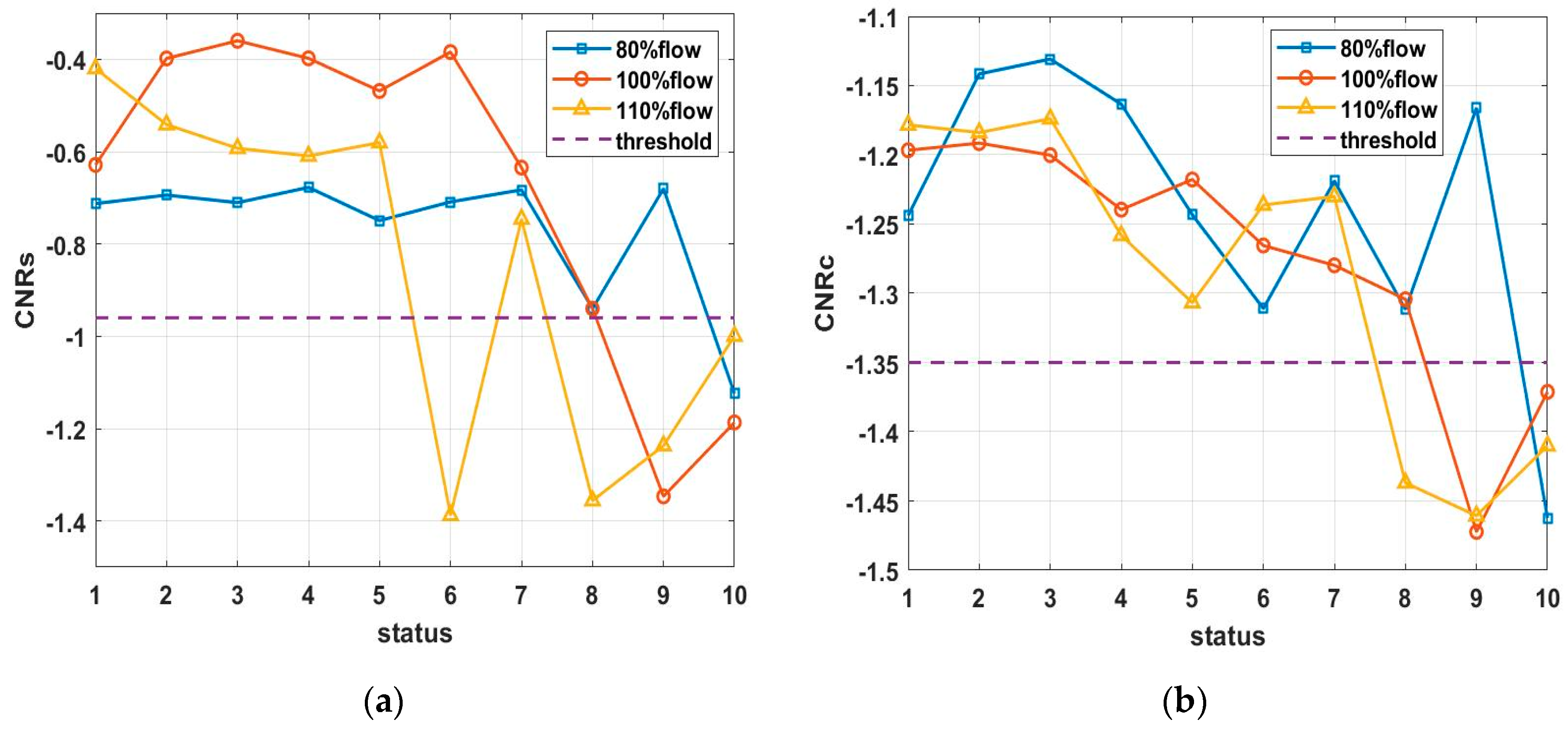
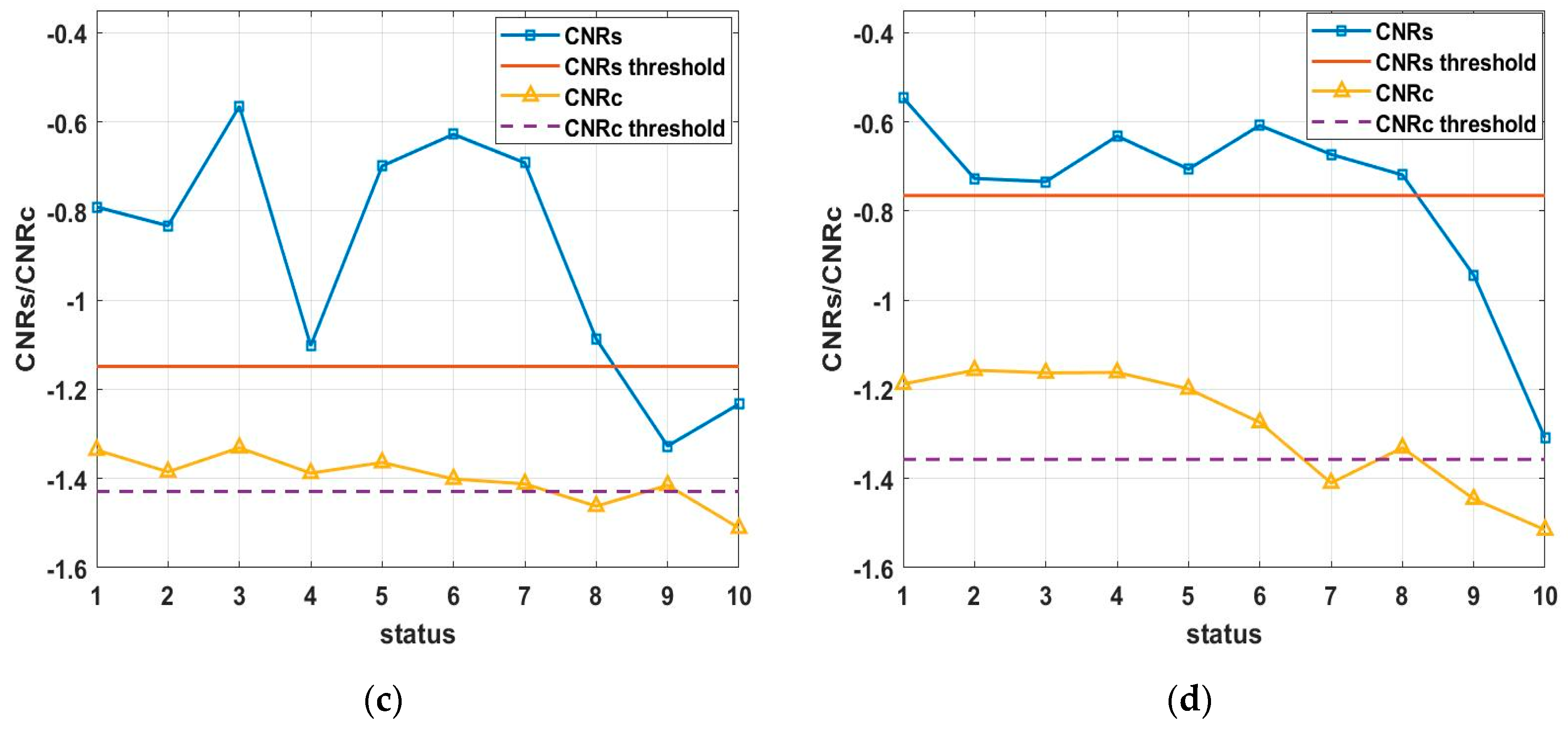
For the adaptive CNR threshold to be involved in incipient cavitation detection, the CNR values are first obtained from the SES or average CSES spectrum by employing the Autogram method described in
Section 3.1, and the CNR values with a normal status, incipient status, and cavitation status, respectively, are then matched by clustering analysis. Finally, the CNR thresholds are selected according to classified CNR values by maximizing the detection rate of cavitation, as the flowchart in
Figure 4 shows. The detection results are consistent with the incipient cavitation characteristics modeled by the proposed CAM model, and have been validated by various experimental data, as shown in
Figure 15. More importantly, the CFAR detector can regulate the threshold reasonably according to the different probability density functions p(z) of the noise in the SES or average CSES spectrum, as shown in
Figure 5. Moreover, the CFAR threshold is able to be self-updated with different sensor data.
In sum, through various experiments of pump cavitation, our proposal has been confirmed to recognize incipient cavitation through a high detection rate and low false alarm. In future work, the NPSHi curve for pump cavitation diagnosis can be obtained, which is defined as the NPSH curve under incipient cavitation. In this sense, the pump operation following the NPSHi curve can avoid the cavitation problem from the very beginning stage, and greatly extend the pump life-span, as well as largely reduce the maintenance cost in the long run. To improve the robustness of data training, pump cavitation experiments should be carried out in more diverse conditions, so that the statistical distributions of cavitation-caused noise in the average CSES spectrum will be more reliable for a high detection rate. However, due to the danger of pump cavitation under extreme conditions, the proposed Autogram method based on CFAR detection should be improved by Bayesian inference techniques using small datasets.

 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}