An Intelligent Non-Invasive Real-Time Human Activity Recognition System for Next-Generation Healthcare


 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Related Work
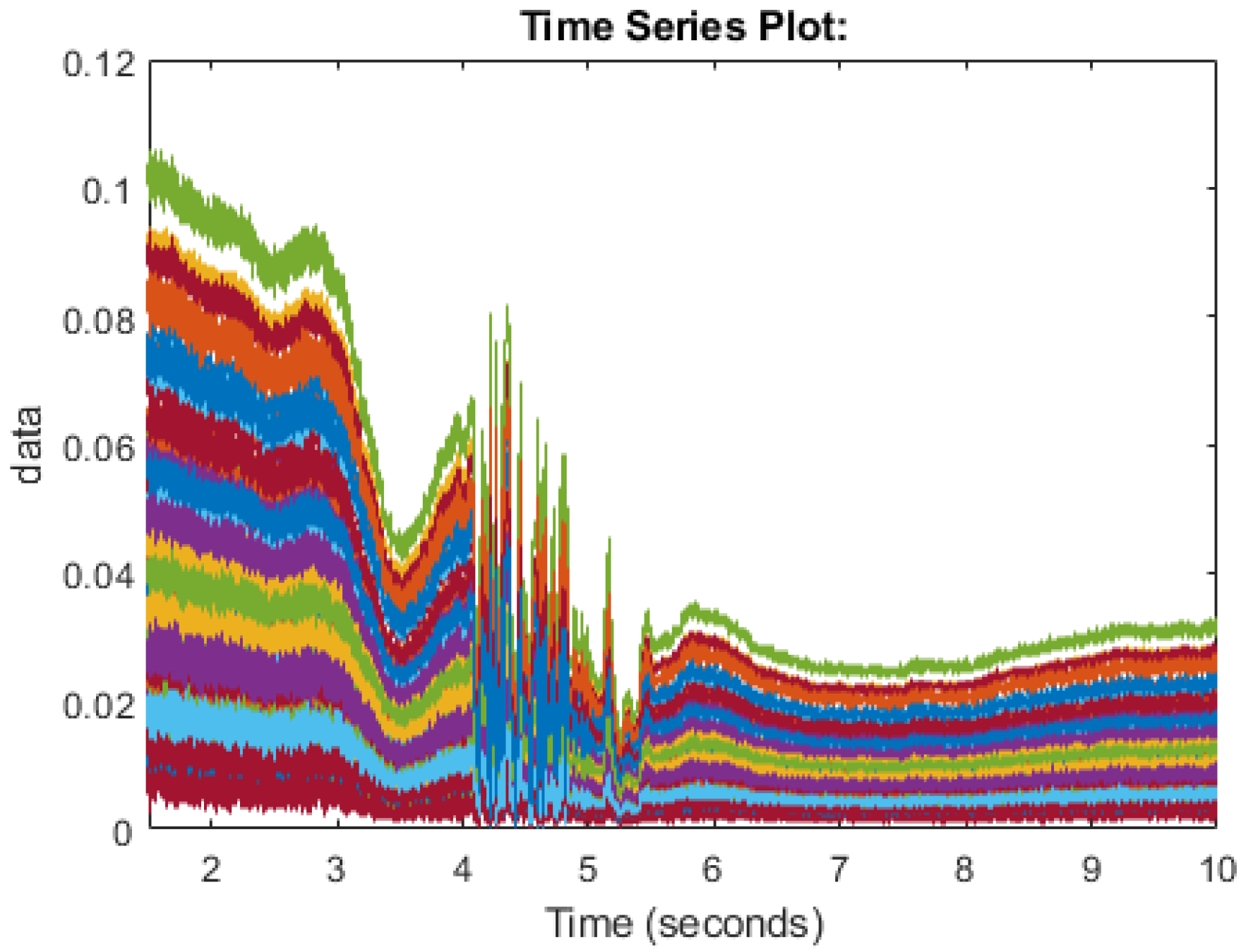
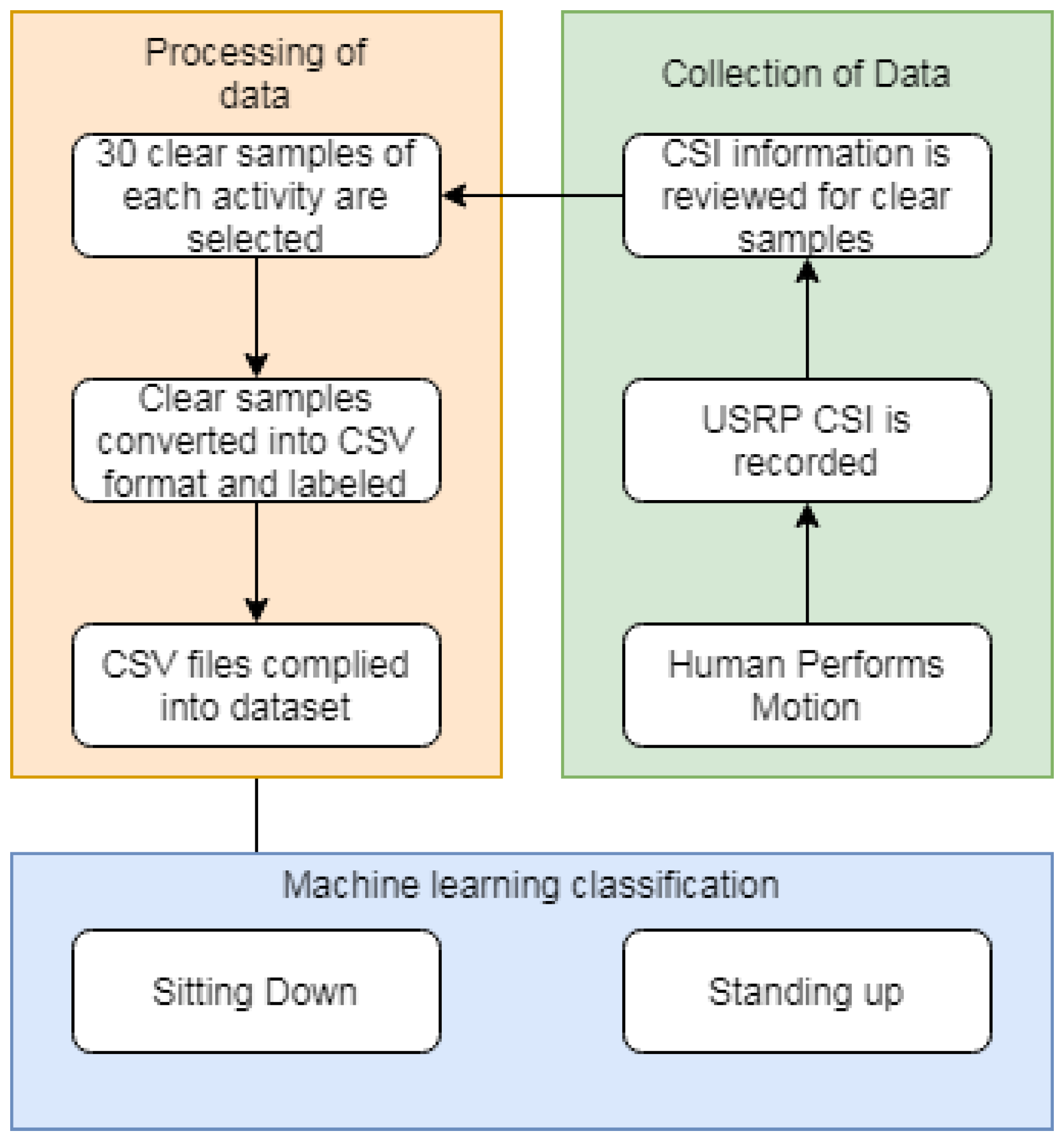
3. Collection of Data
4. Machine Learning Process
- = the importance of node j
- = weighted number of samples reaching node j
- = the impurity value of node j
- = child node from left split on node j
- = child node from right split on node j
- k = is the number of samples
- x = the data
- y = the label
- w = the vector per perpendicular to median of hyper-plane
- u = the unknown vectors
- b = b is constraint
- b = bias
- x = input to neuron
- w = weights
- n = the number of inputs from the incoming layer
- i = a counter from 0 to n
5. Results and Discussion
5.1. Cross-Validation
5.2. Train Test Split
5.3. Comparison of Cross-Validation and Train Test Split
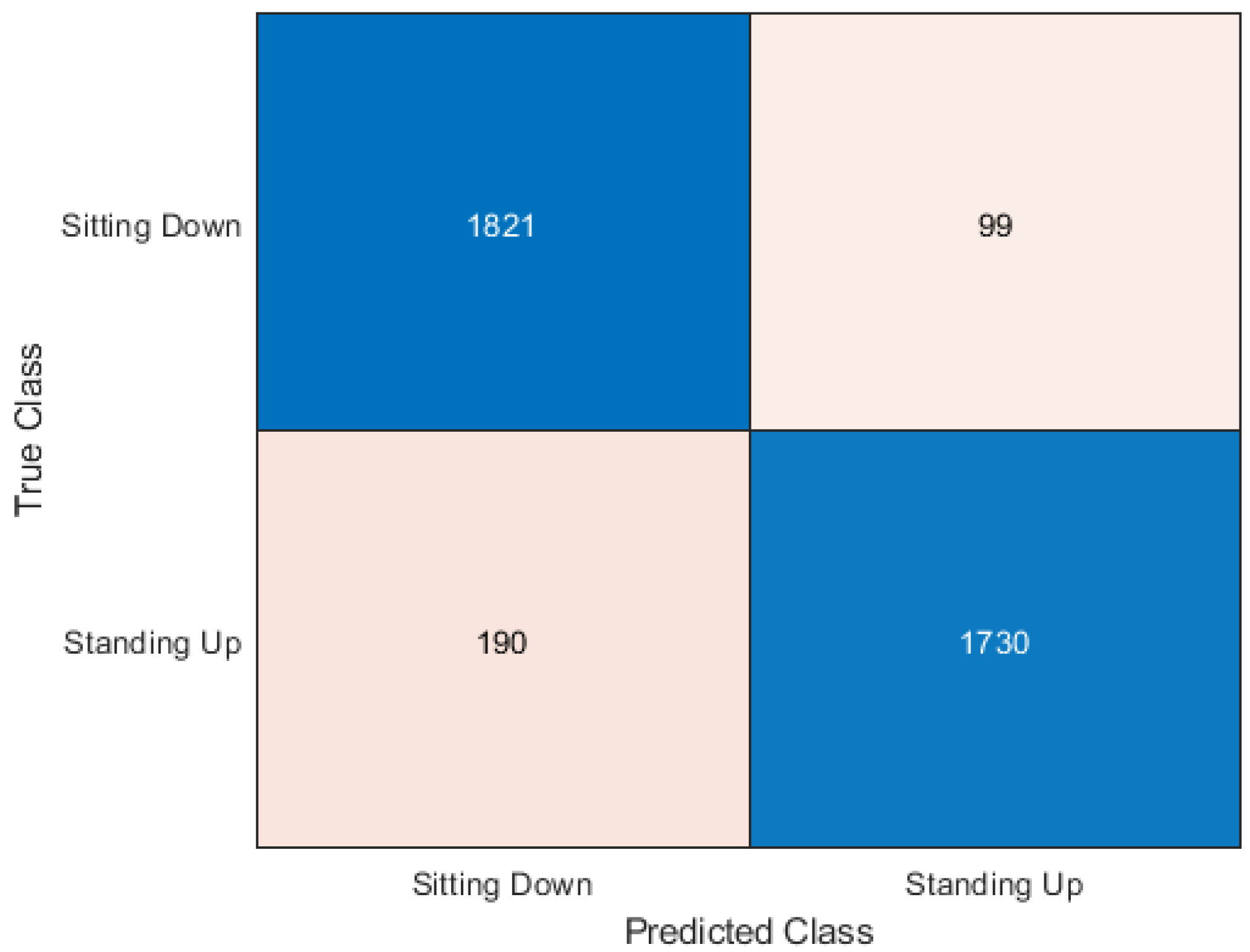
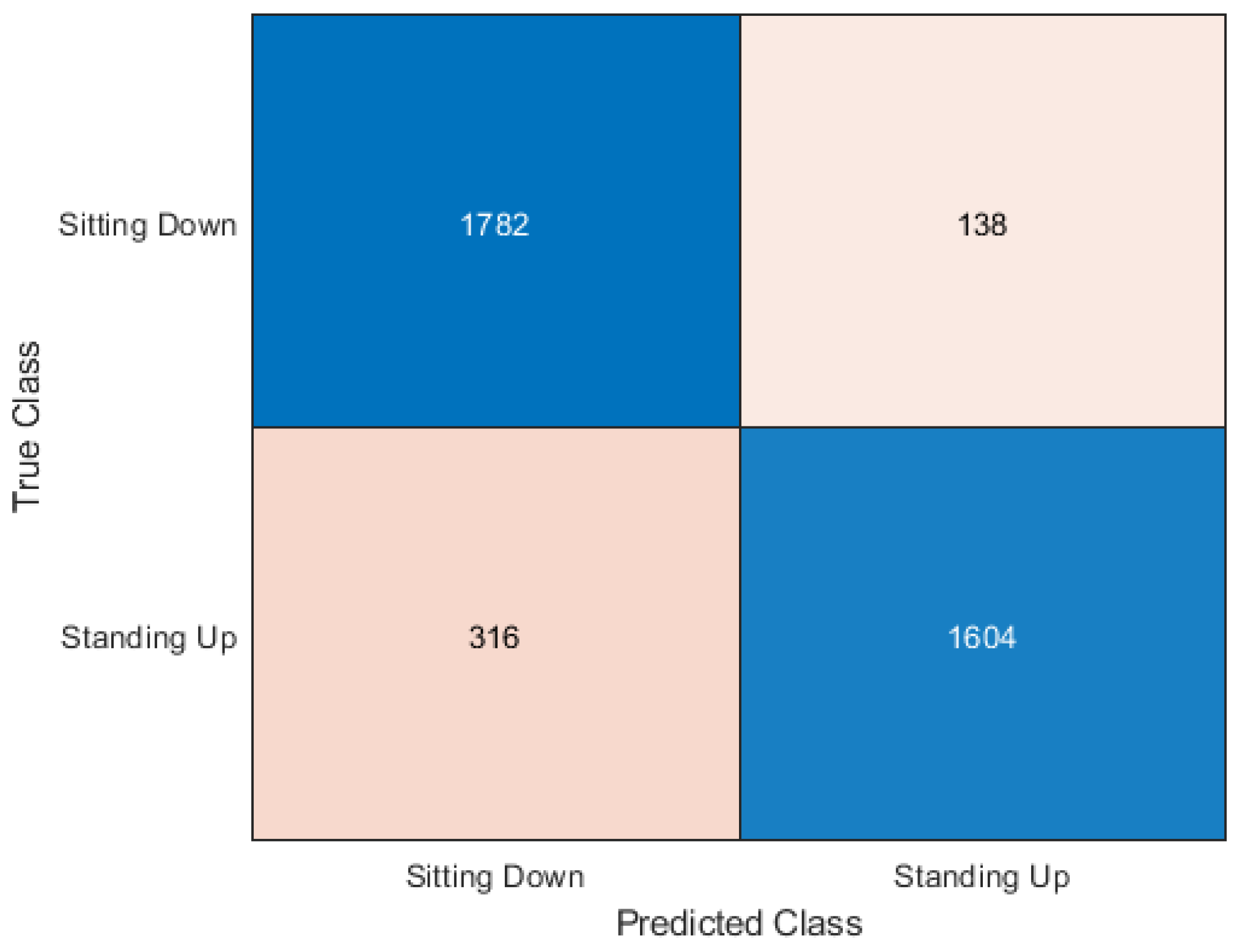
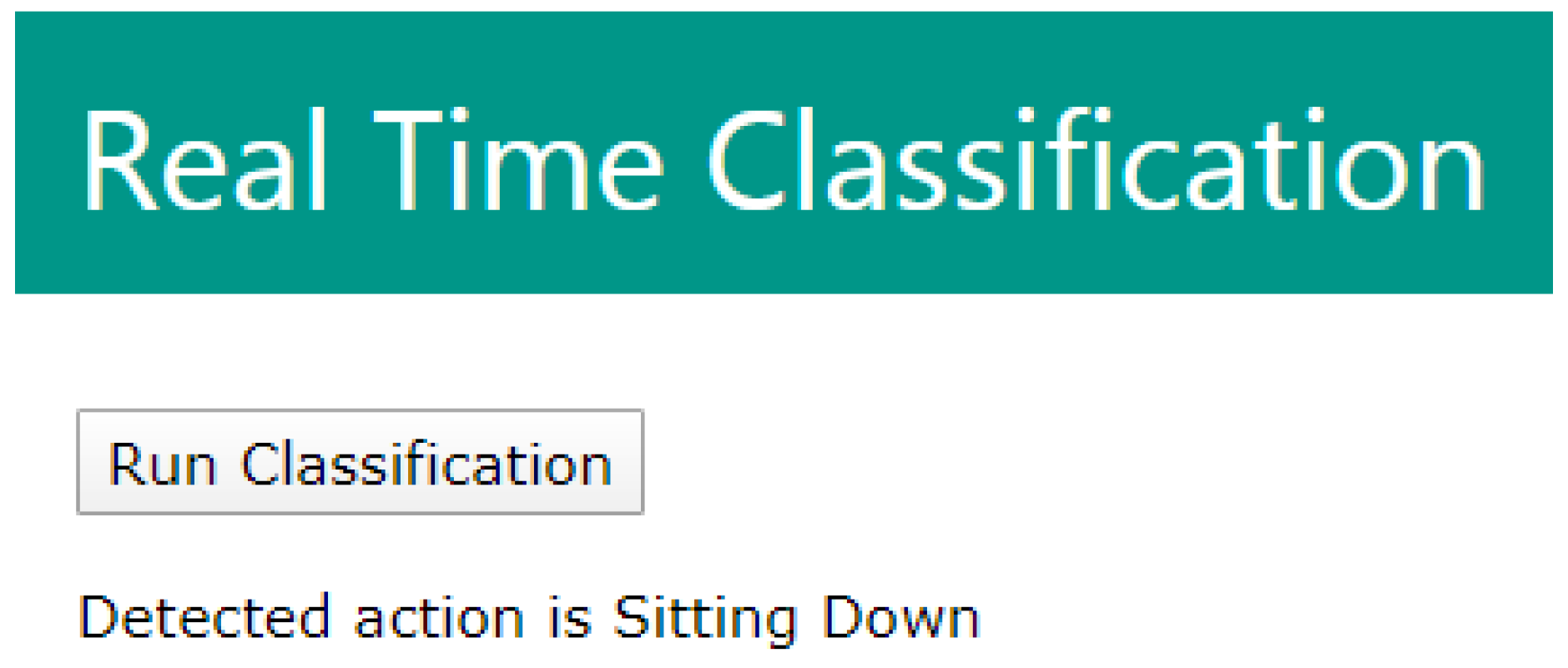
5.4. Real Time Classification
5.5. Benchmark Dataset
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, X.; Ren, X.; Chen, M.; Wang, L.; Ding, Y. Human Posture Recognition in Intelligent Healthcare. J. Physics Conf. Ser. 2020, 1437, 012014. [Google Scholar] [CrossRef]
- Abbasi, Q.H.; Rehman, M.U.; Qaraqe, K.; Alomainy, A. Advances in Body-Centric Wireless Communication: Applications and State-of-the-Art; Institution of Engineering and Technology: London, UK, 2016. [Google Scholar]
- Dong, B.; Ren, A.; Shah, S.A.; Hu, F.; Zhao, N.; Yang, X.; Haider, D.; Zhang, Z.; Zhao, W.; Abbasi, Q.H. Monitoring of atopic dermatitis using leaky coaxial cable. Healthc. Technol. Lett. 2017, 4, 244–248. [Google Scholar] [CrossRef] [PubMed]
- Al-Mishmish, H.; Alkhayyat, A.; Rahim, H.A.; Hammood, D.A.; Ahmad, R.B.; Abbasi, Q.H. Critical data-based incremental cooperative communication for wireless body area network. Sensors 2018, 18, 3661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mercuri, M.; Garripoli, C.; Karsmakers, P.; Soh, P.J.; Vandenbosch, G.A.; Pace, C.; Leroux, P.; Schreurs, D. Healthcare system for non-invasive fall detection indoor environment. In Applications in Electronics Pervading Industry, Environment and Society; Springer: New York, NY, USA, 2016; pp. 145–152. [Google Scholar]
- Haider, D.; Ren, A.; Fan, D.; Zhao, N.; Yang, X.; Shah, S.A.; Hu, F.; Abbasi, Q.H. An efficient monitoring of eclamptic seizures in wireless sensors networks. Comput. Electr. Eng. 2019, 75, 16–30. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, L.; Yang, Y.; Zhou, L.; Ren, L.; Wang, F.; Liu, R.; Pang, Z.; Deen, M.J. A novel cloud-based framework for the elderly healthcare services using digital twin. IEEE Access 2019, 7, 49088–49101. [Google Scholar] [CrossRef]
- Fan, D.; Ren, A.; Zhao, N.; Yang, X.; Zhang, Z.; Shah, S.A.; Hu, F.; Abbasi, Q.H. Breathing rhythm analysis in body centric networks. IEEE Access 2018, 6, 32507–32513. [Google Scholar] [CrossRef]
- Shang, C.; Chang, C.Y.; Chen, G.; Zhao, S.; Chen, H. BIA: Behavior Identification Algorithm using Unsupervised Learning Based on Sensor Data for Home Elderly. IEEE J. Biomed. Health Inf. 2019. [Google Scholar] [CrossRef]
- Yang, X.; Shah, S.A.; Ren, A.; Zhao, N.; Zhao, J.; Hu, F.; Zhang, Z.; Zhao, W.; Rehman, M.U.; Alomainy, A. Monitoring of patients suffering from REM sleep behavior disorder. IEEE J. Electromagn. Microwaves Med. Biol. 2018, 2, 138–143. [Google Scholar] [CrossRef]
- Zhang, T.; Song, T.; Chen, D.; Zhang, T.; Zhuang, J. WiGrus: A Wifi-Based Gesture Recognition System Using Software-Defined Radio. IEEE Access 2019, 7, 131102–131113. [Google Scholar] [CrossRef]
- Tahir, A.; Ahmad, J.; Shah, S.A.; Morison, G.; Skelton, D.A.; Larijani, H.; Abbasi, Q.H.; Imran, M.A.; Gibson, R.M. WiFreeze: Multiresolution Scalograms for Freezing of Gait Detection in Parkinsons Leveraging 5G Spectrum with Deep Learning. Electronics 2019, 8, 1433. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Shah, S.A.; Zhao, G.; Yang, X. Respiration symptoms monitoring in body area networks. Appl. Sci. 2018, 8, 568. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Fan, D.; Ren, A.; Zhao, N.; Shah, S.A.; Alomainy, A.; Ur-Rehman, M.; Abbasi, Q.H. Diagnosis of the Hypopnea syndrome in the early stage. Neural Comput. Appl. 2020, 32, 855–866. [Google Scholar] [CrossRef] [Green Version]
- Demir, A.F.; Abbasi, Q.H.; Ankarali, Z.E.; Alomainy, A.; Qaraqe, K.; Serpedin, E.; Arslan, H. Anatomical region-specific in vivo wireless communication channel characterization. IEEE J. Biomed. Health Inf. 2016, 21, 1254–1262. [Google Scholar] [CrossRef] [PubMed]
- Santos, G.L.; Endo, P.T.; Monteiro, K.H.d.C.; Rocha, E.d.S.; Silva, I.; Lynn, T. Accelerometer-based human fall detection using convolutional neural networks. Sensors 2019, 19, 1644. [Google Scholar] [CrossRef] [Green Version]
- Jilani, S.F.; Munoz, M.O.; Abbasi, Q.H.; Alomainy, A. Millimeter-wave liquid crystal polymer based conformal antenna array for 5G applications. IEEE Antennas Wirel. Propag. Lett. 2018, 18, 84–88. [Google Scholar] [CrossRef] [Green Version]
- Yao, X.; Khan, A.; Jin, Y. Energy Efficient Communication among Wearable Devices using Optimized Motion Detection. In Proceedings of the 2019 IEEE Symposium on Computers and Communications (ISCC), Barcelona, Spain, 29 June–3 July 2019; pp. 1–6. [Google Scholar]
- Yang, X.D.; Abbasi, Q.H.; Alomainy, A.; Hao, Y. Spatial correlation analysis of on-body radio channels considering statistical significance. IEEE Antennas Wirel. Propag. Lett. 2011, 10, 780–783. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, L.; Wei, Z.; Zhang, C.; Wang, W.; Fan, Y. R-DEHM: CSI-based robust duration estimation of human motion with WiFi. Sensors 2019, 19, 1421. [Google Scholar] [CrossRef] [Green Version]
- Chopra, N.; Yang, K.; Abbasi, Q.H.; Qaraqe, K.A.; Philpott, M.; Alomainy, A. THz time-domain spectroscopy of human skin tissue for in-body nanonetworks. IEEE Trans. Terahertz Sci. Technol. 2016, 6, 803–809. [Google Scholar] [CrossRef]
- Lolla, S.; Zhao, A. WiFi Motion Detection: A Study into Efficacy and Classification. In Proceedings of the 2019 IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 16 March 2019; pp. 375–378. [Google Scholar]
- Christiansen, J.M.; Smith, G.E. Development and Calibration of a Low-Cost Radar Testbed Based on the Universal Software Radio Peripheral. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 50–60. [Google Scholar] [CrossRef]
- Kim, S.C. Device-free activity recognition using CSI & big data analysis: A survey. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 539–541. [Google Scholar]
- Tichy, M.; Ulovec, K. OFDM system implementation using a USRP unit for testing purposes. In Proceedings of the 22nd International Conference Radioelektronika 2012, Brno, Czech Republic, 17–18 April 2012; pp. 1–4. [Google Scholar]
- Ashleibta, A.; Shah, S.; Zahid, A.; Imran, M.A.; Abbasi, Q.H. Software Defined Radio Based Testbed for Large Scale Body Movements. IEEE Access 2020. Accepted for Publication. [Google Scholar]
- Zhang, J.; Xu, W.; Hu, W.; Kanhere, S.S. WiCare: Towards In-Situ Breath Monitoring. In Proceedings of the 14th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, Melbourne, VIC, Australia, 7–10 November 2017; pp. 126–135. [Google Scholar]
- Chin, Z.H.; Ng, H.; Yap, T.T.V.; Tong, H.L.; Ho, C.C.; Goh, V.T. Daily Activities Classification on Human Motion Primitives Detection Dataset. In Computational Science and Technology; Springer: Berlin/Heidelberg, Germany, 2019; pp. 117–125. [Google Scholar]
- Shah, S.A.; Fan, D.; Ren, A.; Zhao, N.; Yang, X.; Tanoli, S.A.K. Seizure episodes Detection via Smart Medical Sensing System; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–13. [Google Scholar]
- Fioranelli, F.; Le Kernec, J.; Shah, S.A. Radar for Health Care: Recognizing Human Activities and Monitoring Vital Signs. IEEE Potentials 2019, 38, 16–23. [Google Scholar] [CrossRef] [Green Version]
- Ding, C.; Zou, Y.; Sun, L.; Hong, H.; Zhu, X.; Li, C. Fall detection with multi-domain features by a portable FMCW radar. In Proceedings of the 2019 IEEE MTT-S International Wireless Symposium (IWS), Guangzhou, China, 19–22 May 2019; pp. 1–3. [Google Scholar]
- Shah, S.A.; Fioranelli, F. Human Activity Recognition: Preliminary Results for Dataset Portability using FMCW Radar. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–4. [Google Scholar]
- Shah, S.A.; Fioranelli, F. RF sensing technologies for assisted daily living in healthcare: A comprehensive review. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 26–44. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zhang, X. NOMA-based Resource Allocation for Cluster-based Cognitive Industrial Internet of Things. IEEE Trans. Ind. Inf. 2020, 16, 5379–5388. [Google Scholar] [CrossRef]
- Liu, X.; Jia, M.; Zhang, X.; Lu, W. A novel multichannel Internet of things based on dynamic spectrum sharing in 5G communication. IEEE Internet Things J. 2018, 6, 5962–5970. [Google Scholar] [CrossRef]
- Jalal, A.; Quaid, M.A.K.; Kim, K. A wrist worn acceleration based human motion analysis and classification for ambient smart home system. J. Electr. Eng. Technol. 2019, 14, 1733–1739. [Google Scholar] [CrossRef]
- Zhang, H.; Fu, Z.; Shu, K.I. Recognizing Ping-Pong Motions Using Inertial Data Based on Machine Learning Classification Algorithms. IEEE Access 2019, 7, 167055–167064. [Google Scholar] [CrossRef]
- Zhang, P.; Su, Z.; Dong, Z.; Pahlavan, K. Complex Motion Detection Based on Channel State Information and LSTM-RNN. In Proceedings of the 10th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 6–8 January 2020; pp. 0756–0760. [Google Scholar]
- Al-Khafajiy, M.; Otoum, S.; Baker, T.; Asim, M.; Maamar, Z.; Aloqaily, M.; Taylor, M.; Randles, M. Intelligent Control and Security of Fog Resources in Healthcare Systems via a Cognitive Fog Model. ACM Trans. Internet Technol. 2020. submitted for publication. [Google Scholar]
- Oueida, S.; Kotb, Y.; Aloqaily, M.; Jararweh, Y.; Baker, T. An edge computing based smart healthcare framework for resource management. Sensors 2018, 18, 4307. [Google Scholar] [CrossRef] [Green Version]
- Anjomshoa, F.; Aloqaily, M.; Kantarci, B.; Erol-Kantarci, M.; Schuckers, S. Social behaviometrics for personalized devices in the internet of things era. IEEE Access 2017, 5, 12199–12213. [Google Scholar] [CrossRef]
- Nipu, M.N.A.; Talukder, S.; Islam, M.S.; Chakrabarty, A. Human identification using wifi signal. In Proceedings of the 7th International Conference on Informatics, Electronics & Vision (ICIEV) and 2018 2nd International Conference on Imaging, Vision & Pattern Recognition (icIVPR), Kitakyushu, Japan, 25–29 June 2018; pp. 300–304. [Google Scholar]
- Tanoli, S.A.K.; Rehman, M.; Khan, M.B.; Jadoon, I.; Ali Khan, F.; Nawaz, F.; Shah, S.A.; Yang, X.; Nasir, A.A. An experimental channel capacity analysis of cooperative networks using Universal Software Radio Peripheral (USRP). Sustainability 2018, 10, 1983. [Google Scholar] [CrossRef] [Green Version]
- Hao, J.; Ho, T.K. Machine Learning Made Easy: A Review of Scikit-learn Package in Python Programming Language. J. Educ. Behav. Stat. 2019, 44, 348–361. [Google Scholar] [CrossRef]
- Pappalardo, L. Scikit-Mobility: A Python Library for the Analysis, Generation and Risk Assessment of Mobility Data. arXiv 2019, arXiv:1907.07062. Available online: https://arxiv.org/abs/1907.07062 (accessed on 6 May 2020).
- Shaikhina, T.; Lowe, D.; Daga, S.; Briggs, D.; Higgins, R.; Khovanova, N. Decision tree and random forest models for outcome prediction in antibody incompatible kidney transplantation. Biomed. Signal Process. Control. 2019, 52, 456–462. [Google Scholar] [CrossRef]
- Saçlı, B.; Aydınalp, C.; Cansız, G.; Joof, S.; Yilmaz, T.; Çayören, M.; Önal, B.; Akduman, I. Microwave dielectric property based classification of renal calculi: Application of a kNN algorithm. Comput. Biol. Med. 2019, 112, 103366. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Gu, Y.; Zhang, P.; An, W.; Li, W. Research on KNN Algorithm in Malicious PDF Files Classification under Adversarial Environment. In Proceedings of the 2019 4th International Conference on Big Data and Computing, New York, NY, USA, 10 May 2019; pp. 156–159. [Google Scholar]
- Jain, M.; Narayan, S.; Balaji, P.; Bhowmick, A.; Muthu, R.K.; Bharath, K.P.; Karthik, R. Speech emotion recognition using support vector machine. arXiv 2020, arXiv:2002.07590. Available online: https://arxiv.org/abs/2002.07590 (accessed on 6 May 2020).
- Hamid, Y.; Sugumaran, M.; Balasaraswathi, V. Ids using machine learning-current state of art and future directions. Curr. J. Appl. Sci. Technol. 2016, 15, 1–22. [Google Scholar] [CrossRef]
- Hassan, A.A.; Sheta, A.F.; Wahbi, T.M. Intrusion Detection System Using Weka Data Mining Tool. Int. J. Sci. Res. 2017, 6, 2319–7064. [Google Scholar]
- Biswas, S.K. Intrusion detection using machine learning: A comparison study. Int. J. Pure Appl. Math. 2018, 118, 101–114. [Google Scholar]
- Tandon, S.; Tripathi, S.; Saraswat, P.; Dabas, C. Bitcoin Price Forecasting using LSTM and 10-Fold Cross validation. In Proceedings of the 2019 International Conference on Signal Processing and Communication (ICSC), Noida, India, 7–9 March 2019; pp. 323–328. [Google Scholar]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A public domain dataset for human activity recognition using smartphones. In Proceedings of the European Symposium on Artificial Neural Networks (ESANN 2013), Computational Intelligence and Machine Learning, Bruges, Belgium, 24–26 April 2013. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Input data (Signal) | round(0.75*rand(104,1)) |
| Sample time | 1/80e4 |
| Modulation type | QPSK |
| Bit per symbol M | 2 bits |
| OFDM Subcarrier | 64 subcarriers |
| Pilot subcarrier | 4 |
| Null subcarrier | 12 |
| Cycle prefix M | NFFT-data subcarrier |
| Samples per frame | Used subcarrier log2 (M) |
| Parameters | Values |
|---|---|
| Platform | USRP X300/X310 |
| TX IP address | 192.168.11.1 |
| RX IP address | 192.168.10.1 |
| Channel mapping | 1 TX, 2 RX |
| Centre frequency | 5.32 GHz |
| Local oscillator offset | Dialog |
| PPS source | Internal |
| Clock source | Internal |
| Master clock rate | 120 MHz |
| Transport data type | Int16 |
| Gain (dB) | TX 70, RX 50 |
| Sample time | 1/80e4 |
| Interpolation factor | 500 |
| Decimation factor | 500 |
| Algorithm | Accuracy | Precision | Recall | f1-Score |
|---|---|---|---|---|
| Random Forest | 92.47% | 0.93 | 0.92 | 0.92 |
| K nearest Neighbours | 88.17% | 0.89 | 0.88 | 0.88 |
| Support Vector Machine | 84.68% | 0.86 | 0.85 | 0.85 |
| Neural network model | 90.05% | 0.90 | 0.90 | 0.90 |
| Ensemble Classifier | 92.18% | 0.92 | 0.92 | 0.92 |
| Algorithm | Accuracy | Precision | Recall | f1-Score |
|---|---|---|---|---|
| Random Forest | 96.70% | 0.97 | 0.97 | 0.972 |
| K nearest Neighbours | 90.71% | 0.91 | 0.91 | 0.91 |
| Support Vector Machine | 81.77% | 0.87 | 0.82 | 0.82 |
| Neural network model | 93.40% | 0.94 | 0.93 | 0.93 |
| Ensemble Classifier | 93.83% | 0.94 | 0.94 | 0.94 |
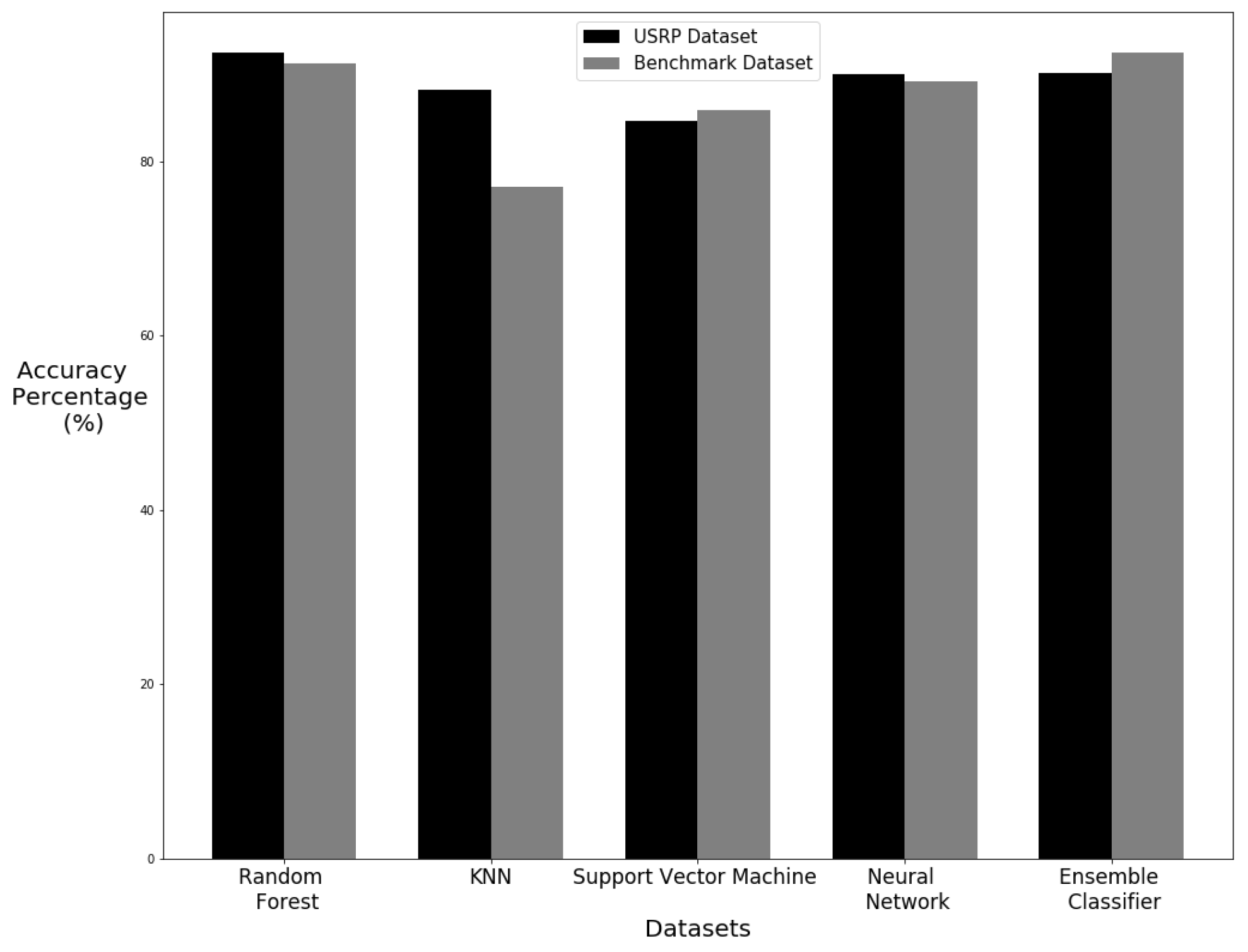
| Algorithm | USRP Dataset Accuracy | Benchmark Dataset Accuracy |
|---|---|---|
| Random Forest | 92.47% | 91.20% |
| K nearest Neighbours | 88.17% | 77.06% |
| Support Vector Machine | 84.68% | 85.90% |
| Neural network model | 90.05% | 89.21% |
| Ensemble Classifier | 92.18% | 92.40% |
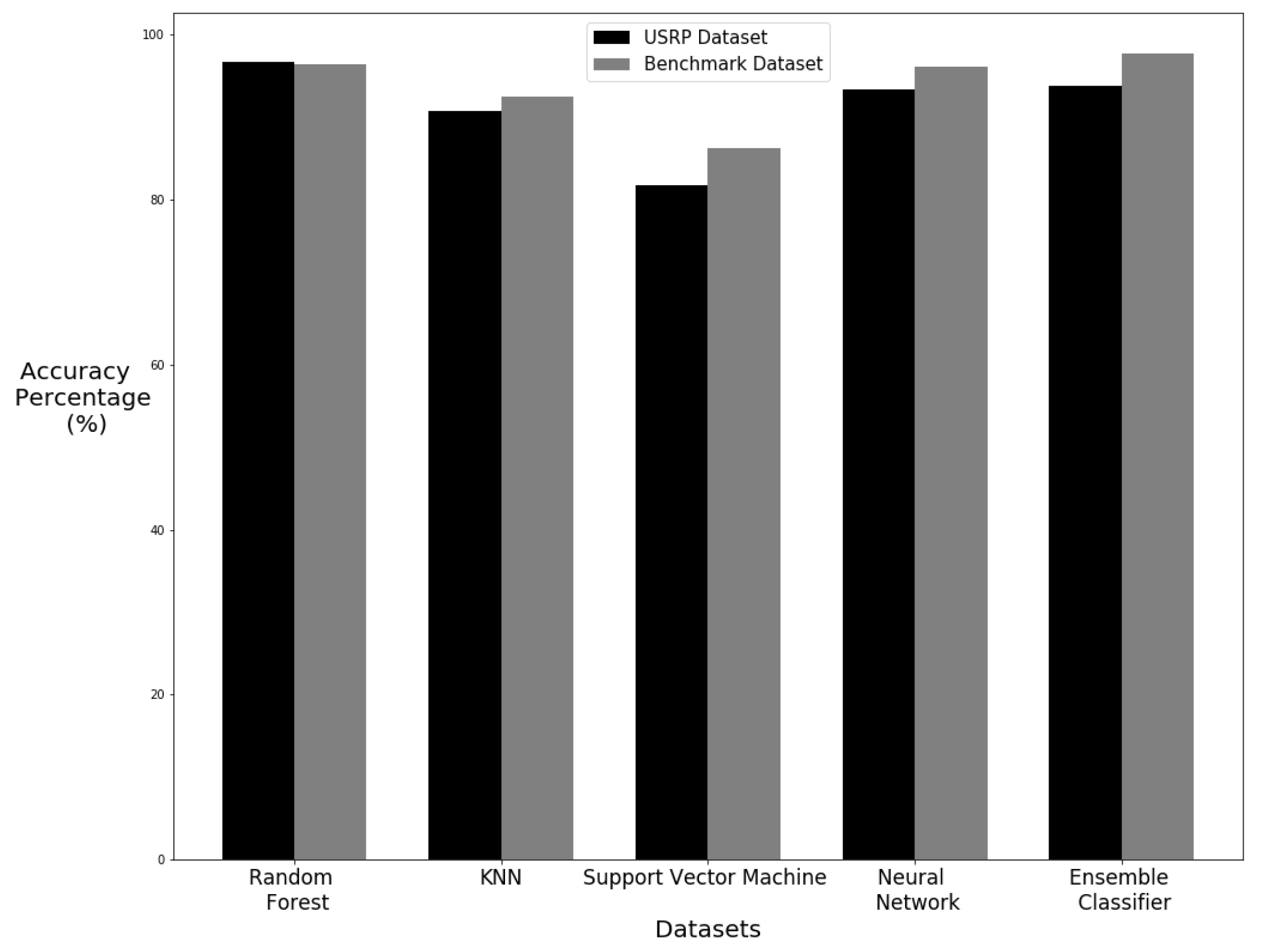
| Algorithm | USRP Dataset Accuracy | Benchmark Dataset Accuracy |
|---|---|---|
| Random Forest | 96.70% | 96.49% |
| K nearest Neighbours | 90.71% | 92.48% |
| Support Vector Machine | 81.77% | 86.21% |
| Neural network model | 93.40% | 96.11% |
| Ensemble Classifier | 93.83% | 97.74% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taylor, W.; Shah, S.A.; Dashtipour, K.; Zahid, A.; Abbasi, Q.H.; Imran, M.A. An Intelligent Non-Invasive Real-Time Human Activity Recognition System for Next-Generation Healthcare. Sensors 2020, 20, 2653. https://doi.org/10.3390/s20092653
Taylor W, Shah SA, Dashtipour K, Zahid A, Abbasi QH, Imran MA. An Intelligent Non-Invasive Real-Time Human Activity Recognition System for Next-Generation Healthcare. Sensors. 2020; 20(9):2653. https://doi.org/10.3390/s20092653
Chicago/Turabian StyleTaylor, William, Syed Aziz Shah, Kia Dashtipour, Adnan Zahid, Qammer H. Abbasi, and Muhammad Ali Imran. 2020. "An Intelligent Non-Invasive Real-Time Human Activity Recognition System for Next-Generation Healthcare" Sensors 20, no. 9: 2653. https://doi.org/10.3390/s20092653
APA StyleTaylor, W., Shah, S. A., Dashtipour, K., Zahid, A., Abbasi, Q. H., & Imran, M. A. (2020). An Intelligent Non-Invasive Real-Time Human Activity Recognition System for Next-Generation Healthcare. Sensors, 20(9), 2653. https://doi.org/10.3390/s20092653