A Dynamic Hysteresis Model and Nonlinear Control System for a Structure-Integrated Piezoelectric Sensor-Actuator



Abstract
:1. Introduction
2. Design of Piezoelectric Sensor-Actuator
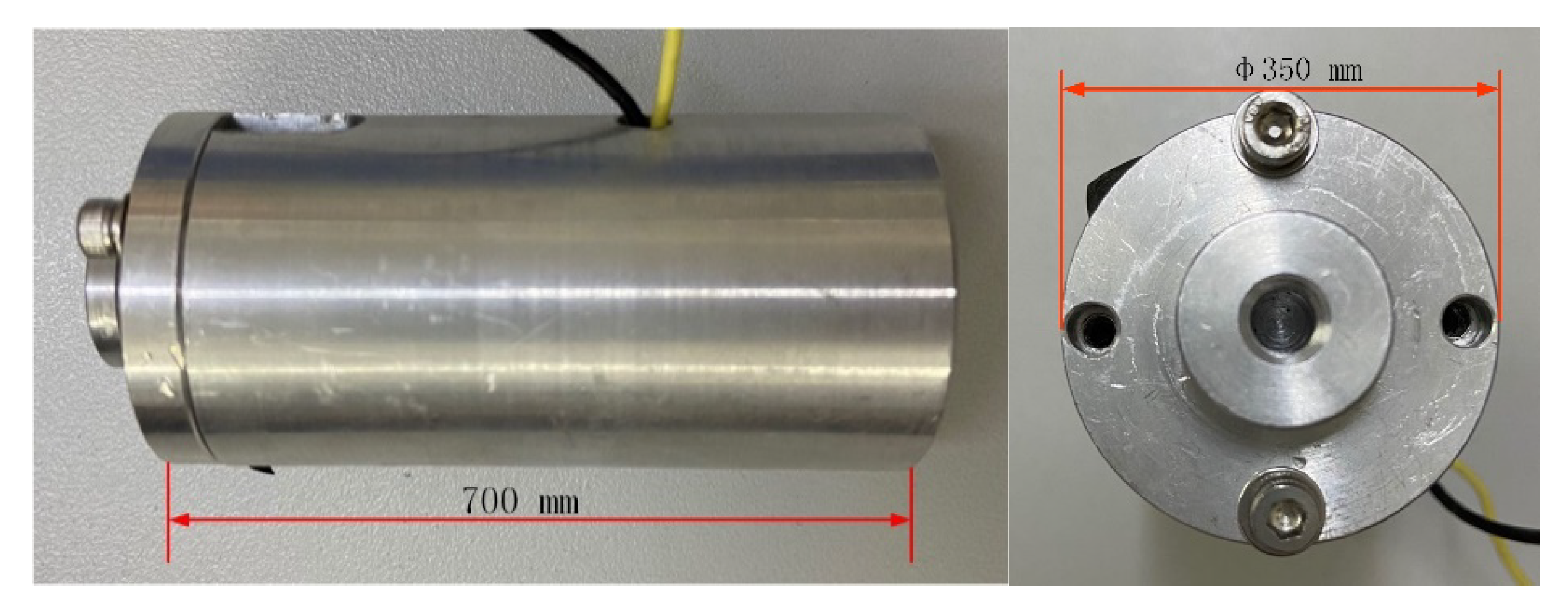
2.1. Structure Design of Piezoelectric Sensor-Actuator
2.2. The Mathematical Model of the Piezoelectric Sensor-Actuator
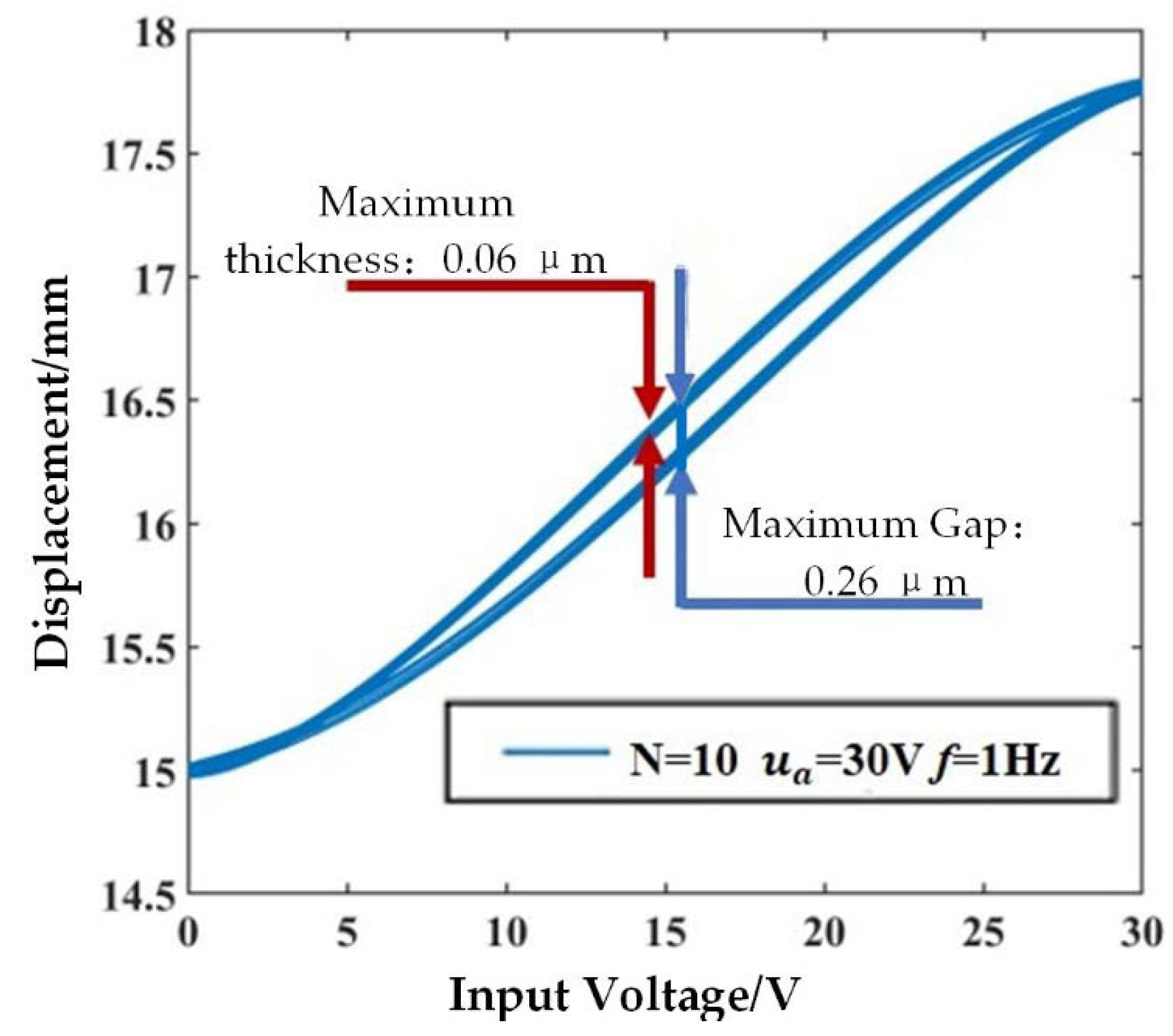
2.3. Experimental Study on Hysteresis of Piezoelectric Sensor-Actuator
3. Dynamic Hysteresis Model of Piezoelectric Sensor-Actuator
3.1. Dynamic Hysteresis Nonlinear Model of Piezoelectric Sensor-Actuator
3.2. Dynamic Hysteresis Nonlinear Inverse Model of Piezoelectric Sensor-Actuator
4. PID Control System of the Piezoelectric Sensor-Actuator
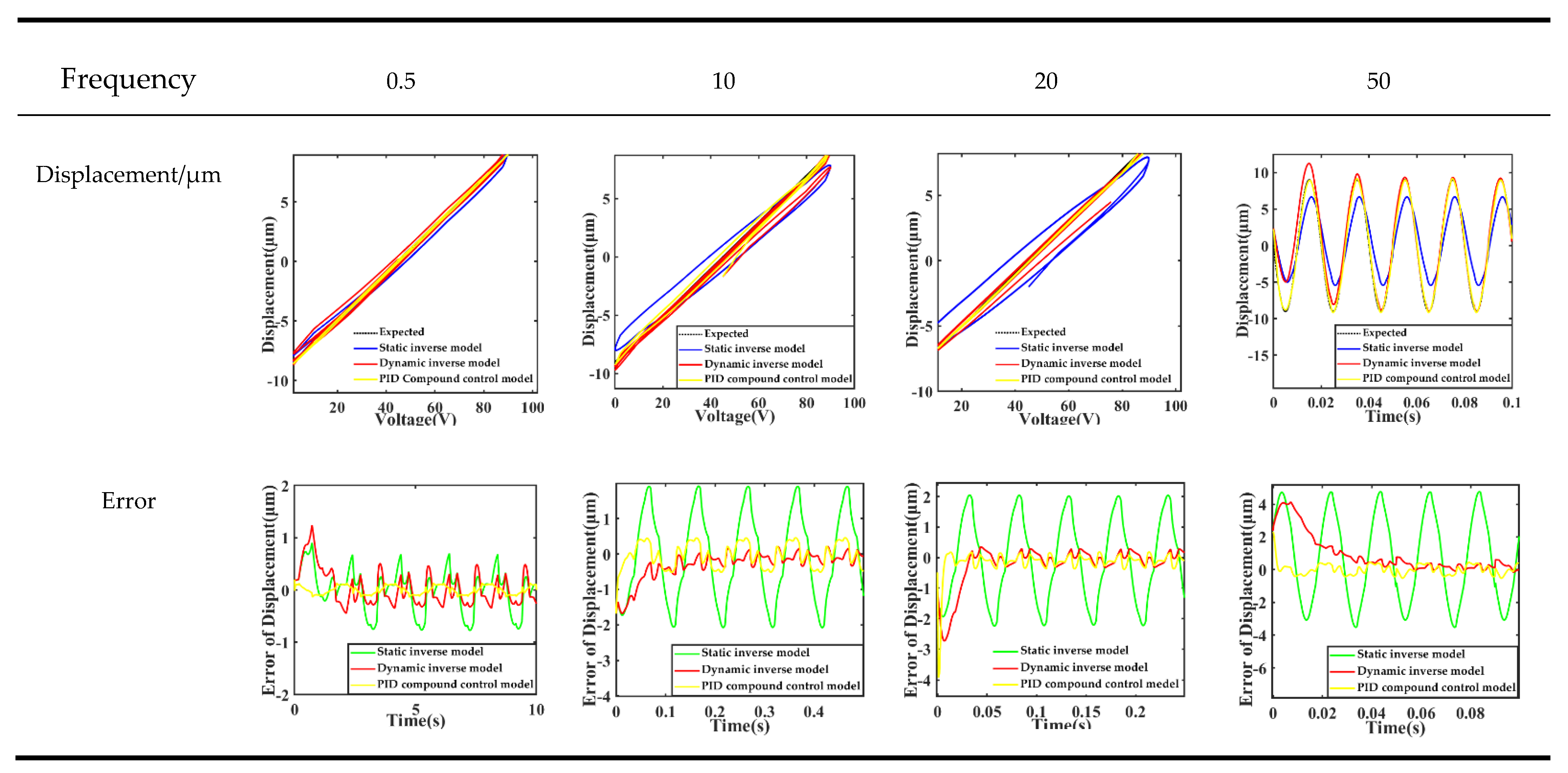
5. Result and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| x | the displacement of the actuator |
| S3 | the strain of the piezoelectric stack |
| T3 | stress |
| d33 | piezoelectric constant |
| E3 | external electric field |
| short circuit elastic compliance coefficient with constant electric field | |
| h | the thickness of a single piezoelectric ceramic sheet |
| n | the number of layers of piezoelectric laminated ceramics |
| l | the length of the piezoelectric ceramic sheet |
| b | the width of the piezoelectric ceramic sheet |
| Fout | the direction output force of piezoelectric stack |
| ua | the drive voltage of the piezoelectric stack |
| kamp | series circuit of gain |
| R | resistance |
| Ca | capacitors |
| uc | the output voltage of driving amplifier |
| q | the charge produced by quartz |
| A | the area of the piezoelectric quartz |
| εr | the relative permittivity of quartz |
| ε0 | the dielectric constant of air |
| m | the equivalent mass of moving part of piezoelectric sensor-actuator system |
| cf | the equivalent viscosity coefficient of actuator structure |
| kf | the stiffness coefficient of actuator |
| ka | the equivalent stiffness of preload |
References
- Hao, Y.; Wang, T.; Xie, Z.; Sun, W.; Liu, Z.; Fang, X.; Yang, M.; Wen, L. A eutectic-alloy-infused soft actuator with sensing, tunable degrees of freedom, and stiffness properties. J. Micromech. Microeng. 2018, 28, 024004. [Google Scholar] [CrossRef] [Green Version]
- Di Rito, G.; Chiarelli, M.R.; Luciano, B. Dynamic Modelling and Experimental Characterization of a Self-Powered Structural Health-Monitoring System with MFC Piezoelectric Patches. Sensors 2020, 20, 950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, L.; Weng, M.; Zhou, P.; Huang, F.; Liu, C.; Fan, S.; Zhang, W. Graphene-Based Actuator with Integrated-Sensing Function. Adv. Funct. Mater. 2019, 29, 1806057. [Google Scholar] [CrossRef]
- Sun, G.; Hu, Y.; Dong, M.; He, Y.; Yu, M.; Zhu, L. Posture measurement of soft pneumatic bending actuator using optical fibre-based sensing membrane. Ind. Robot Int. J. Robot. Res. Appl. 2019, 46, 118–127. [Google Scholar] [CrossRef]
- Oh, H.; Dayeh, S.A. Physics-Based Device Models and Progress Review for Active Piezoelectric Semiconductor Devices. Sensors 2020, 20, 3872. [Google Scholar] [CrossRef] [PubMed]
- He, J.P.; Huo, Q.; Li, Y.H.; Wang, K.; Zhu, M.C.; Xu, Z.B. Neural network control of space manipulator based on dynamic model and disturbance observer. IEEE Access 2019, 7, 130101–130112. [Google Scholar]
- Zeng, X.; Wang, J.; Song, P.; Huang, S. A novel piezoelectric micro-gripper’s control based on modified smith predictor. In Proceedings of the 2017 International Conference on Electronic Industry and Automation; Babaei, E., Reig, C., Sung, W.T., Eds.; Atlantis Press: Paris, France, 2017; Volume 145, pp. 277–281. [Google Scholar]
- Gonzalez, C.; Lumia, R. An IPMC microgripper with integrated actuator and sensing for constant finger-tip displacement. Smart Mater. Struct. 2015, 24, 24. [Google Scholar] [CrossRef]
- Rakotondrabe, M.; Ivan, I.A.; Khadraoui, S.; Lutz, P.; Chaillet, N. Simultaneous Displacement/Force Self-Sensing in Piezoelectric Actuators and Applications to Robust Control. IEEE/ASME Trans. Mechatron. 2014, 20, 519–531. [Google Scholar] [CrossRef] [Green Version]
- Boukabache, H.; Escriba, C.; Fourniols, J.-Y. Toward Smart Aerospace Structures: Design of a Piezoelectric Sensor and Its Analog Interface for Flaw Detection. Sensors 2014, 14, 20543–20561. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Kan, J.W.; Wang, S.; Wang, H.; Ma, J.; Jiang, Y. Development of a self-sensing piezoelectric pump with a bimorph transducer. J. Intell. Mater. Syst. Struct. 2015, 27, 581–591. [Google Scholar] [CrossRef]
- Lee, H.; Park, H.; Park, K.K.; Yi, H. Park Application of Adaptive Wave Cancellation Underwater to a Piezoelectric-Material-Based Multilayer Sensor. Sensors 2019, 20, 134. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Varanis, M.; Silva, A.; Mereles, A.; Pederiva, R. MEMS accelerometers for mechanical vibrations analysis: A comprehensive review with applications. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 527. [Google Scholar] [CrossRef]
- Rathod, V.T. A Review of Electric Impedance Matching Techniques for Piezoelectric Sensors, Actuators and Transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- El Rifai, O.; Aumond, B.; Youcef-Toumi, K. Imaging at the nano-scale. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2004; Volume 2, pp. 715–722. [Google Scholar]
- Gan, J.; Zhang, X. A review of nonlinear hysteresis modeling and control of piezoelectric actuators. AIP Adv. 2019, 9, 040702. [Google Scholar] [CrossRef] [Green Version]
- Hu, H.; Ben Mrad, R. On the classical Preisach model for hysteresis in piezoceramic actuators. Mechatronics 2003, 13, 85–94. [Google Scholar] [CrossRef]
- Mayergoyz, I.; Friedman, G. Generalized Preisach model of hysteresis. IEEE Trans. Magn. 1988, 24, 212–217. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, Q.; Wang, H.; Qiu, J. Hysteresis modeling and tracking control for piezoelectric stack actuators using neural-Preisach model. Int. J. Appl. Electromagn. Mech. 2019, 61, 445–459. [Google Scholar] [CrossRef]
- Luo, Y.; Qu, Y.; Zhang, Y.; Xu, M.; Xie, S.; Zhang, X. Hysteretic modeling and simulation of a bilateral piezoelectric stack actuator based on Preisach model. Int. J. Appl. Electromagn. Mech. 2019, 59, 271–280. [Google Scholar] [CrossRef]
- Bernard, Y.; Maalej, A.H.; Lebrun, L.; Ducharne, B. Preisach modelling of ferroelectric behaviour. Int. J. Appl. Electromagn. Mech. 2007, 25, 729–733. [Google Scholar] [CrossRef]
- Tan, U.-X.; Latt, W.T.; Shee, C.Y.; Riviere, C.N.; Ang, W.T. Feedforward Controller of Ill-Conditioned Hysteresis Using Singularity-Free Prandtl–Ishlinskii Model. IEEE/ASME Trans. Mechatron. 2009, 14, 598–605. [Google Scholar] [CrossRef] [Green Version]
- Al Janaideh, M.; Rakheja, S.; Su, C.-Y. A generalized Prandtl–Ishlinskii model for characterizing the hysteresis and saturation nonlinearities of smart actuators. Smart Mater. Struct. 2009, 18, 18. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Aljanaideh, O. Further results on open-loop compensation of rate-dependent hysteresis in a magnetostrictive actuator with the Prandtl-Ishlinskii model. Mech. Syst. Signal Process. 2018, 104, 835–850. [Google Scholar] [CrossRef]
- Gu, G.; Zhu, L. High-speed tracking control of piezoelectric actuators using an ellipse-based hysteresis model. Rev. Sci. Instrum. 2010, 81, 85104. [Google Scholar] [CrossRef] [PubMed]
- Gu, G.-Y.; Li, C.-X.; Zhu, L.-M.; Su, C.-Y. Modeling and Identification of Piezoelectric-Actuated Stages Cascading Hysteresis Nonlinearity with Linear Dynamics. IEEE/ASME Trans. Mechatron. 2015, 21, 1792–1797. [Google Scholar] [CrossRef]
- Gu, G.-Y.; Yang, M.-J.; Zhu, L.-M. Real-time inverse hysteresis compensation of piezoelectric actuators with a modified Prandtl-Ishlinskii model. Rev. Sci. Instrum. 2012, 83, 065106. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Ji, H.; Qiu, J.; Chen, Y. A modified prandtl-ishlinskii model for modeling asymmetric hysteresis of piezoelectric actuators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2010, 57, 1200–1210. [Google Scholar] [CrossRef]
- Banks, H.T.; Kurdila, A.J.; Webb, G. Identification of hysteretic control influence operators representing smart actuators part I: Formulation. Math. Probl. Eng. 1997, 3, 287–328. [Google Scholar] [CrossRef]
- Goldfarb, M.; Celanovic, N. Modeling piezoelectric stack actuators for control of micromanipulation. IEEE Control Syst. 1997, 17, 69–79. [Google Scholar] [CrossRef]
- Chen, J.; Peng, G.; Hu, H.; Ning, J. Dynamic Hysteresis Model and Control Methodology for Force Output Using Piezoelectric Actuator Driving. IEEE Access 2020, 8, 205136–205147. [Google Scholar] [CrossRef]
- Li, K.; Yang, Z.; Lallart, M.; Kwok, N.M.; Chen, Y.; Liu, H. Hybrid hysteresis modeling and inverse model compensation of piezoelectric actuators. Smart Mater. Struct. 2019, 28, 115038. [Google Scholar] [CrossRef]
- Ang, W.T.; Khosla, P.K.; Riviere, C.N. Feedforward controller with inverse rate-dependent model for piezoelectric actuators in trajectory-tracking applications. IEEE/ASME Trans. Mechatron. 2007, 12, 134–142. [Google Scholar] [CrossRef] [Green Version]
- Yi, S.; Yang, B.; Meng, G. Ill-conditioned dynamic hysteresis compensation for a low-frequency magnetostrictive vibration shaker. Nonlinear Dyn. 2019, 96, 535–551. [Google Scholar] [CrossRef]
- Davoodi, A.A.; Izadi, I.; Ghaisary, J. Design and Implementation of a Feedforward Feedback Controller for a Piezoelectric Actuator. In Proceedings of the 2019 27th Iranian Conference on Electrical Engineering (ICEE); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 1070–1074. [Google Scholar]
- Saleem, A.; Al Hattali, M.; Shafiq, M.; Bahadur, I. Tracking Control of Piezoelectric Actuators using Feedforward/Feedback Learning-based Controller. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT); Institute of Electrical and Electronics Engineers (IEEE); Piscataway, NJ, USA, 2019; pp. 1981–1985. [Google Scholar]
- Bichurin, M.I.; Petrov, V.; Petrov, R. Direct and inverse magnetoelectric effect in layered composites in electromechanical resonance range: A review. J. Magn. Magn. Mater. 2012, 324, 3548–3550. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Rakotondrabe, M. On hysteresis modeling of a piezoelectric precise positioning system under variable temperature. Mech. Syst. Signal Process. 2020, 145, 106880. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Material | Elastic Modulus (GPa) | Poisson Ratio | Density ρ (kg/m3) |
|---|---|---|---|---|
| Piezoelectric stack | PZT-554 | — | 0.34 | 7600 |
| Quartz wafer | x-quartz | — | 0.17 | 2650 |
| Sensor housing | steel | 206 | 0.25 | 7900 |
| Package cavity | aluminum | 72 | 0.33 | 2810 |
| Fixed seat | aluminum | 72 | 0.33 | 2810 |
| Thrust bar | aluminum | 72 | 0.33 | 2810 |
| Frequency of Input Signal/Hz. | 0.5 | 10 | 20 | 50 | |
|---|---|---|---|---|---|
| Errors | |||||
| Maximum error of static model | 0.06529 | 0.24479 | 0.27672 | 0.29893 | |
| Average error of static model | 0.02707 | 0.07615 | 0.09984 | 0.18748 | |
| Root mean square error of static model | 0.03394 | 0.08634 | 0.11256 | 0.20978 | |
| Maximum error of dynamic model | 0.12678 | 0.17687 | 0.15577 | 0.78268 | |
| Average error of dynamic model | 0.04434 | 0.04614 | 0.04096 | 0.05255 | |
| Root mean square error of dynamic model | 0.05940 | 0.05288 | 0.04746 | 0.08927 | |
| Frequency of Input Signal/Hz. | 0.5 | 10 | 20 | 50 | |
|---|---|---|---|---|---|
| Errors | |||||
| Maximum error of static inverse model | 0.90116 | 2.08209 | 2.24139 | 4.76271 | |
| Average error of static inverse model | 0.31638 | 0.28382 | 0.30930 | 1.24777 | |
| Root mean square error of static inverse model | 0.40279 | 0.63755 | 0.70053 | 1.99596 | |
| Maximum error of dynamic inverse model | 1.23827 | 1.68336 | 2.73286 | 4.13814 | |
| Average error of dynamic inverse model | 0.27003 | 0.08209 | 0.08725 | 0.46418 | |
| Root mean square error of dynamic inverse model | 0.33745 | 0.25077 | 0.33672 | 1.05211 | |
| Input Signal Frequency /Hz | 0.5 | 10 | 20 | 50 |
|---|---|---|---|---|
| Maximum error | 0.20094 | 1.68336 | 3.92499 | 2.28057 |
| Averahe error | 0.07136 | 0.07545 | 0.05028 | 0.13326 |
| Root mean square error | 0.07998 | 0.17840 | 0.22415 | 0.24960 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, X.; Song, H.; Cao, H.; Zhang, L.; Zhao, X.; Fan, J. A Dynamic Hysteresis Model and Nonlinear Control System for a Structure-Integrated Piezoelectric Sensor-Actuator. Sensors 2021, 21, 269. https://doi.org/10.3390/s21010269
Shan X, Song H, Cao H, Zhang L, Zhao X, Fan J. A Dynamic Hysteresis Model and Nonlinear Control System for a Structure-Integrated Piezoelectric Sensor-Actuator. Sensors. 2021; 21(1):269. https://doi.org/10.3390/s21010269
Chicago/Turabian StyleShan, Xiaobiao, Henan Song, Han Cao, Lanshuang Zhang, Xuhang Zhao, and Jizhuang Fan. 2021. "A Dynamic Hysteresis Model and Nonlinear Control System for a Structure-Integrated Piezoelectric Sensor-Actuator" Sensors 21, no. 1: 269. https://doi.org/10.3390/s21010269
APA StyleShan, X., Song, H., Cao, H., Zhang, L., Zhao, X., & Fan, J. (2021). A Dynamic Hysteresis Model and Nonlinear Control System for a Structure-Integrated Piezoelectric Sensor-Actuator. Sensors, 21(1), 269. https://doi.org/10.3390/s21010269