Real-Time Multi-Modal Sensing and Feedback for Catheterization in Porcine Tissue


Abstract
:1. Introduction
- Assembly and calibration of an endovascular catheter that is embedded with FBG sensors and infrared precision spheres, allowing for real-time feedback.
- Introduction of a radiation-free intra-operative imaging framework for catheterizations.
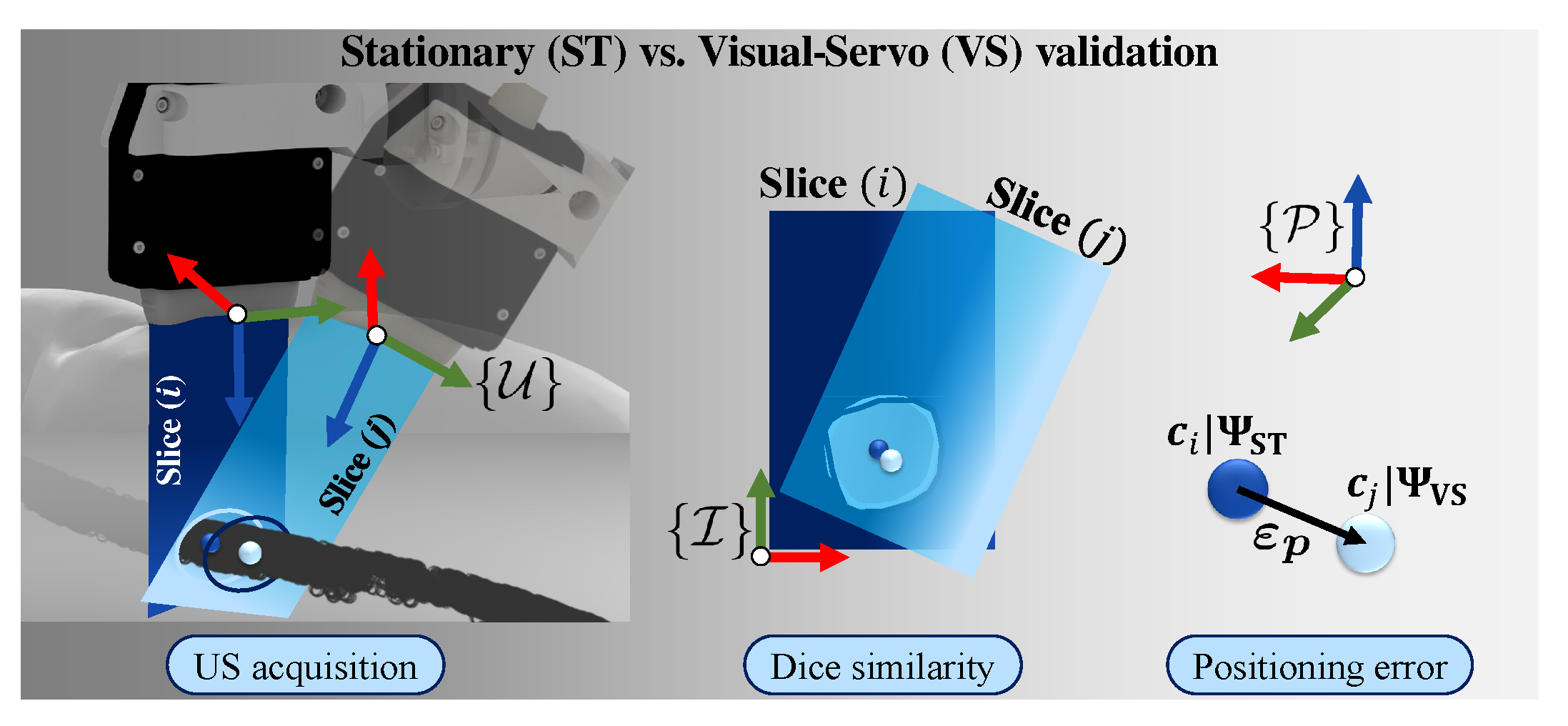
- Fully autonomous US acquisition directly performed by a robotic system with visual-servo (VS)-based compensation of externally-induced PLMs.
- Real-time multi-modal sensing and 3D visualization of the vasculature, catheter, and surrounding surface tissue.
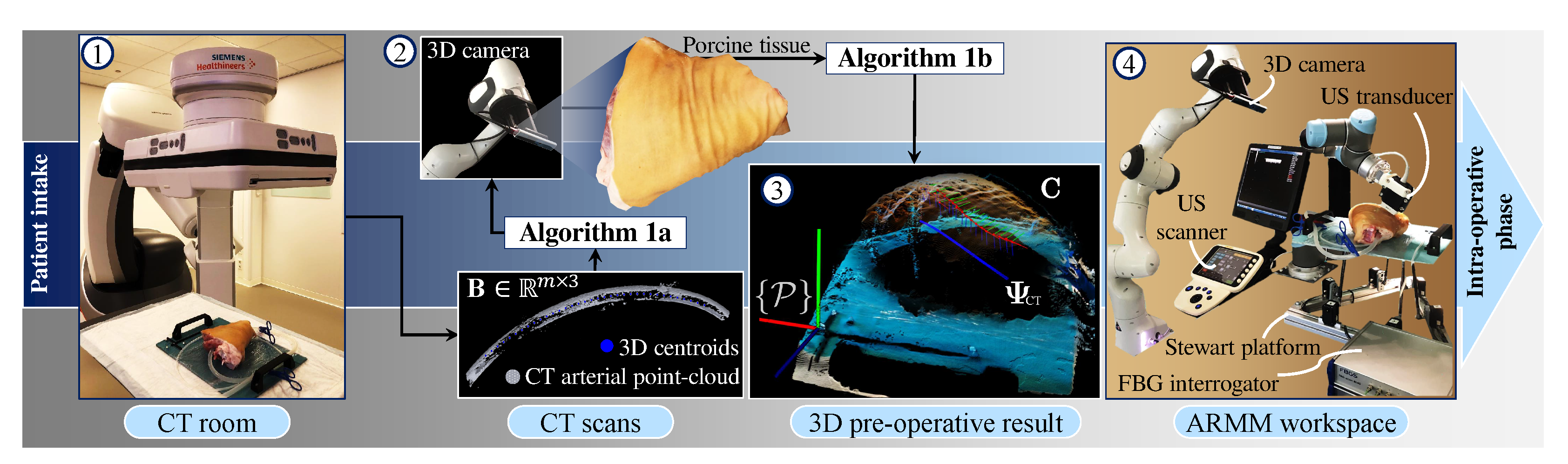
2. Pre-Operative Calibration and Planning
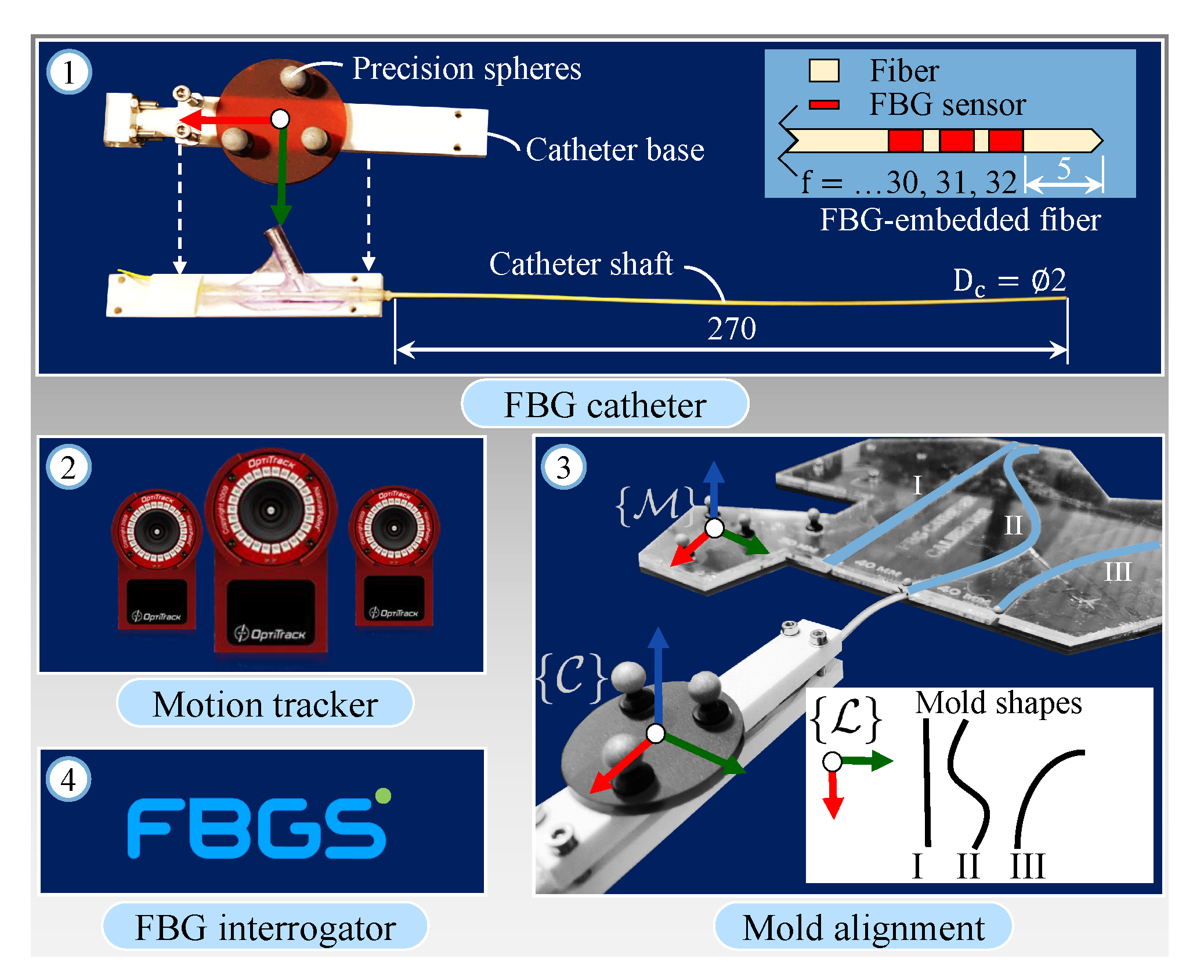
2.1. Imaging and Sensing Modalities
2.2. FBG-Embedded Catheter Assembly
2.3. Calibration of the Imaging and Sensing Modalities
| Algorithm 1 3D centroid generation inside an arterial volume |
 |
| Algorithm 2 Robot-mounted US transducer pose generation |
 |
2.4. Pre-Operative Planning
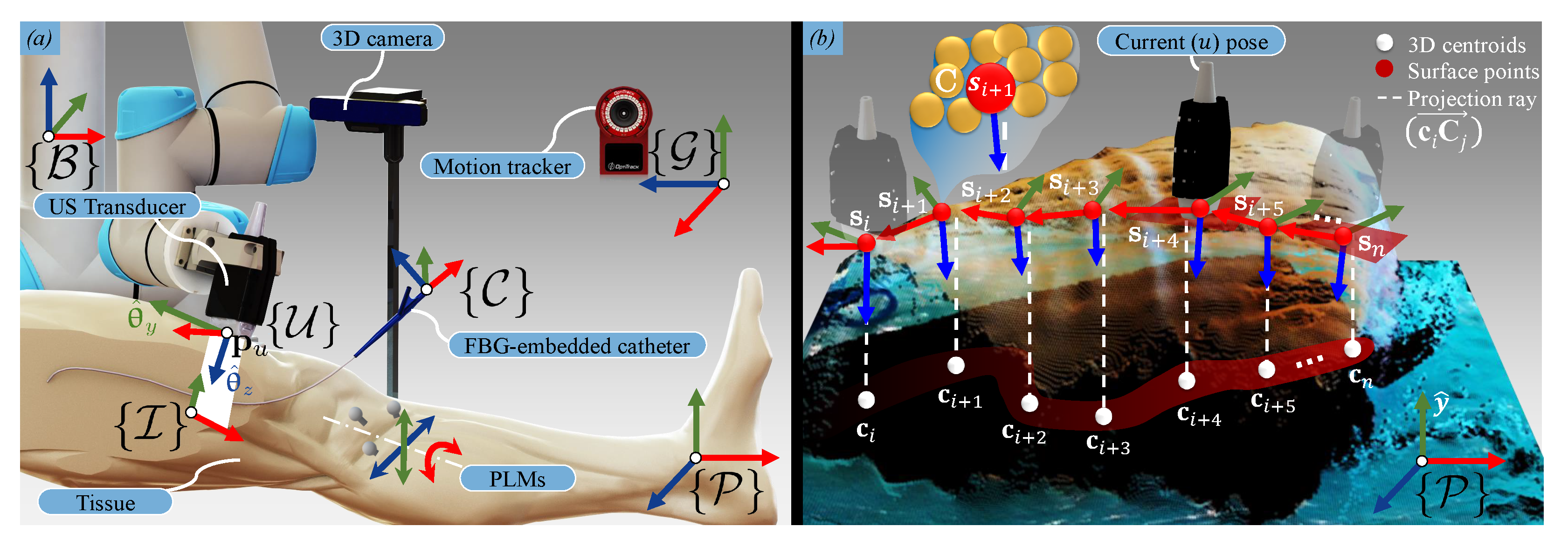
3. Multi-Modal Sensing and Feedback
3.1. Visual-Servo-Based Motion Compensation
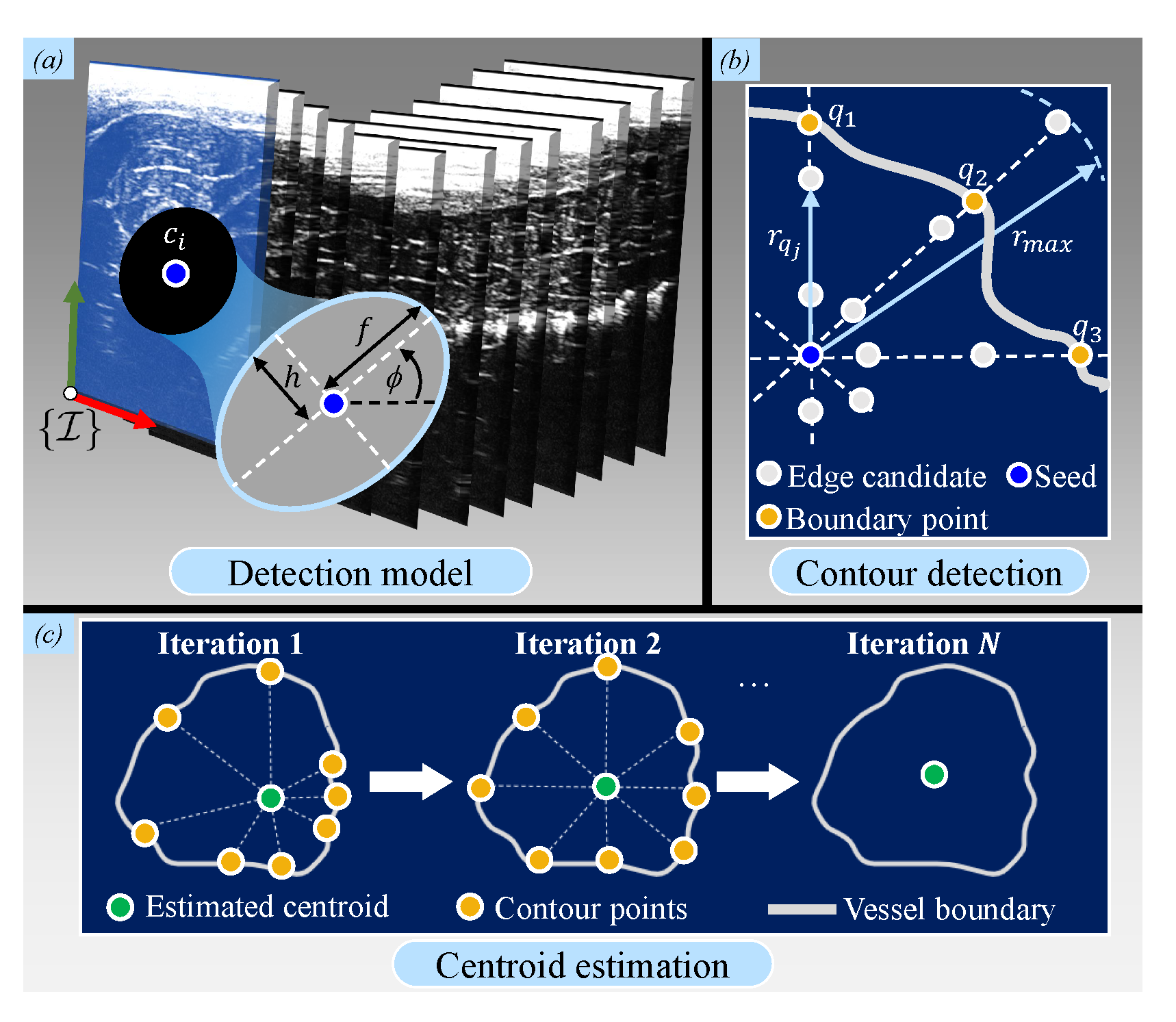
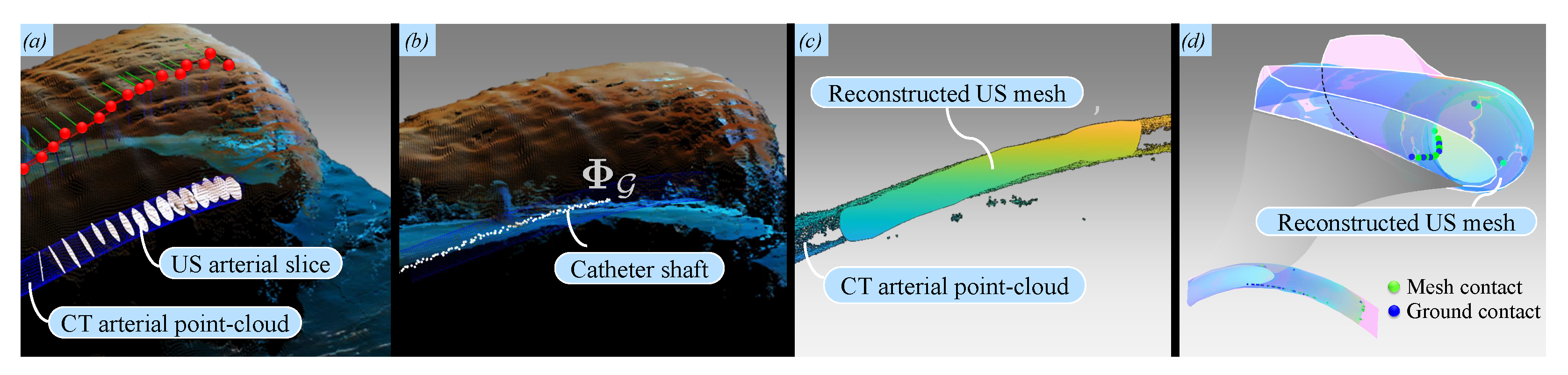
3.2. Ultrasound-Based Arterial Reconstruction
3.3. Catheter Shape Reconstruction
4. Experimental Results
4.1. Procedure
4.2. Results
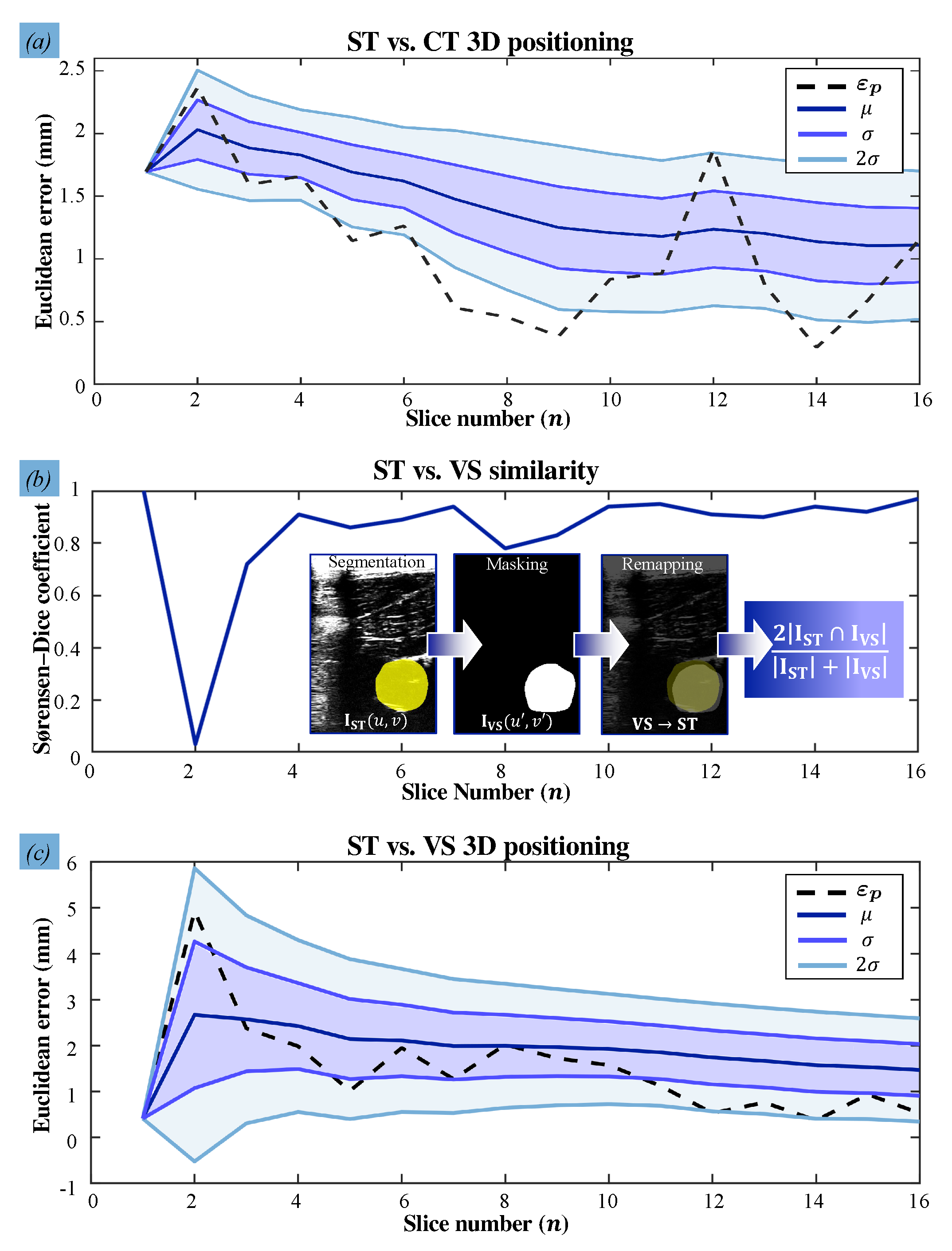
4.3. Error Analysis
5. Conclusions and Future Work
5.1. Current Limitations and Clinical Feasibility
5.2. Future Work
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CT | Computed Tomography |
| FBG | Fiber Bragg Grating |
| PLMs | Periodic Limb Movements |
| RCCNS | Remote-Controlled Catheter Navigation Systems |
| US | Ultrasound |
Appendix A. Task-Space Velocity Controller
Appendix B. Artificial Arterial Boundary Reconstruction
References
- Mahmud, E.; Naghi, J.; Ang, L.; Harrison, J.; Behnamfar, O.; Pourdjabbar, A.; Reeves, R.; Patel, M. Demonstration of the safety and feasibility of robotically assisted percutaneous coronary intervention in complex coronary lesions: Results of the CORA-PCI study (Complex Robotically Assisted Percutaneous Coronary Intervention). JACC Cardiovasc. Interv. 2017, 10, 1320–1327. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.; Liu, H.; Huang, W.; Wang, S.; Liang, Z. Steerable catheters in minimally invasive vascular surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2009, 5, 381–391. [Google Scholar] [CrossRef] [PubMed]
- Sharei, H.; Alderliesten, T.; van den Dobbelsteen, J.J.; Dankelman, J. Navigation of guidewires and catheters in the body during intervention procedures: A review of computer-based models. J. Med. Imaging 2018, 5, 010902. [Google Scholar] [CrossRef] [PubMed]
- Aspelin, P.; Aubry, P.; Fransson, S.-G.; Strasser, R.; Willenbrock, R.; Berg, K.J. Nephrotoxic effects in high-risk patients undergoing angiography. N. Eng. J. Med. 2003, 348, 491–499. [Google Scholar] [CrossRef]
- Einstein, A.J. Effects of radiation exposure from cardiac imaging: How good are the data? J. Am. Coll. Cardiol. 2012, 59, 553–565. [Google Scholar] [CrossRef] [Green Version]
- Trejos, A.L.; Patel, R.V.; Naish, M.D. Force sensing and its application in minimally invasive surgery and therapy: A survey. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2010, 224, 1435–1454. [Google Scholar] [CrossRef]
- Bell, J.A.; Saikus, C.E.; Ratnayaka, K.; Wu, V.; Sonmez, M.; Faranesh, A.Z.; Colyer, J.H.; Lederman, R.J.; Kocaturk, O. A deflectable guiding catheter for real-time MRI-guided interventions. J. Magn. Reson. Imaging 2012, 35, 908–915. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Poirot, N.L.; Franson, D.; Seiberlich, N.; Griswold, M.A.; Çavuşoğlu, M.C. Modeling and validation of the three-dimensional deflection of an MRI-compatible magnetically-actuated steerable catheter. Trans. Biomed. Eng. 2015, 63, 2142–2154. [Google Scholar]
- Alam, I.S.; Steinberg, I.; Vermesh, O.; van den Berg, N.S.; Rosenthal, E.L.; van Dam, G.M.; Ntziachristos, V.; Gambhir, S.S.; Hernot, S.; Rogalla, S. Emerging intraoperative imaging modalities to improve surgical precision. Mol. Imaging Biol. 2018, 20, 705–715. [Google Scholar] [CrossRef] [Green Version]
- Tavallaei, M.A.; Lavdas, M.K.; Gelman, D.; Drangova, M. Magnetic resonance imaging compatible remote catheter navigation system with 3 degrees of freedom. Int. J. Comput. Assist. Radiol. Surg. 2016, 11, 1537–1545. [Google Scholar] [CrossRef]
- Abolmaesumi, P.; Salcudean, S.E.; Zhu, W.-H.; Sirouspour, M.R.; DiMaio, S.P. Image-guided control of a robot for medical ultrasound. IEEE Trans. Robot. Autom. 2002, 18, 11–23. [Google Scholar] [CrossRef]
- Chen, X.; Bao, N.; Li, J.; Kang, Y. A review of surgery navigation system based on ultrasound guidance. In Proceedings of the IEEE International Conference on Information and Automation (ICIA), Shenyang, China, 6–8 June 2012; pp. 882–886. [Google Scholar]
- Roesthuis, R.J.; Kemp, M.; van den Dobbelsteen, J.J.; Misra, S. Three-dimensional needle shape reconstruction using an array of fiber bragg grating sensors. IEEE/ASME Trans. Mechatron. 2014, 19, 1115–1126. [Google Scholar] [CrossRef]
- Denasi, A.; Khan, F.; Boskma, K.J.; Kaya, M.; Hennersperger, C.; Göbl, R.; Tirindelli, M.; Navab, N.; Misra, S. An observer-based fusion method using multicore optical shape sensors and ultrasound images for magnetically-actuated catheters. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; p. 50. [Google Scholar]
- Khan, F.; Roesthuis, R.J.; Misra, S. Force sensing in continuum manipulators using fiber bragg grating sensors. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2531–2536. [Google Scholar]
- Kouh Soltani, M.; Khanmohammadi, S.; Ghalichi, F. A three-dimensional shape-based force and stiffness-sensing platform for tendon-driven catheters. Sensors 2016, 16, 990. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Guo, S.; Gao, B.; Jia, F. The beam theory-based collision force detection of the catheter operating system. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, 7–10 August 2016; pp. 701–706. [Google Scholar]
- Antico, M.; Sasazawa, F.; Wu, L.; Jaiprakash, A.; Roberts, J.; Crawford, R.; Pandey, A.K.; Fontanarosa, D. Ultrasound guidance in minimally invasive robotic procedures. Med. Image Anal. 2019, 54, 149–167. [Google Scholar] [CrossRef] [PubMed]
- Langsch, F.; Virga, S.; Esteban, J.; Göbl, R.; Navab, N. Robotic Ultrasound for Catheter Navigation in Endovascular Procedures. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 5404–5410. [Google Scholar]
- Mathiassen, K.; Fjellin, J.E.; Glette, K.; Hol, P.K.; Elle, O.J. An ultrasound robotic system using the commercial robot UR5. Front. Robot. AI 2016, 3, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Pratt, P.; Hughes-Hallett, A.; Zhang, L.; Patel, N.; Mayer, E.; Darzi, A.; Yang, G.-Z. Autonomous ultrasound-guided tissue dissection. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI), Munich, Germany, 5–9 October 2015; pp. 249–257. [Google Scholar]
- Graumann, C.; Fuerst, B.; Hennersperger, C.; Bork, F.; Navab, N. Robotic ultrasound trajectory planning for volume of interest coverage. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 736–741. [Google Scholar]
- Jiang, Z.; Grimm, M.; Zhou, M.; Esteban, J.; Simson, W.; Zahnd, G.; Navab, N. Automatic Normal Positioning of Robotic Ultrasound Probe Based Only on Confidence Map Optimization and Force Measurement. IEEE Robot. Autom. Lett. 2020, 5, 1342–1349. [Google Scholar] [CrossRef]
- Vanegas-Arroyave, N.; Zaghloul, K.; Hallett, M.; Lungu, C. Leg Movements During General Anesthesia. Mov. Disord. Clin. Pract. 2016, 3, 510–512. [Google Scholar] [CrossRef] [Green Version]
- Kwartowitz, D.M.; Miga, M.I.; Herrell, S.D.; Galloway, R.L. Towards image guided robotic surgery: Multi-arm tracking through hybrid localization. Int. J. Comput. Assist. Radiol. Surg. 2009, 4, 281–286. [Google Scholar] [CrossRef]
- Nguyen, Q.C.; Kim, Y.; Kwon, H. Optimization of layout and path planning of surgical robotic system. Int. J. Control Autom. Syst. 2017, 15, 375–384. [Google Scholar] [CrossRef]
- Ren, H.; Banerjee, H. A Preface in Electromagnetic Robotic Actuation and Sensing in Medicine. In Electromagnetic Actuation and Sensing in Medical Robotics; Springer: Singapore, 2018; pp. 1–10. [Google Scholar]
- Kenngott, H.; Neuhaus, J.; Müller-Stich, B.; Wolf, I.; Vetter, M.; Meinzer, H.P.; Köninger, J.; Büchler, M.; Gutt, C. Development of a navigation system for minimally invasive esophagectomy. Surg. Endosc. 2008, 22, 1858–1865. [Google Scholar] [CrossRef]
- Goldsmith, A.; Pedersen, P.; Szabo, T. An inertial-optical tracking system for portable, quantitative, 3D ultrasound. In Proceedings of the IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008; pp. 45–49. [Google Scholar]
- Ataide, E.J.G.; Ziegle, J.; Kalmar, M.; Rathi, S.; Shukla, S.; Boese, A.; Friebe, M. Feasibility and Initial Results of Assisted Ultrasound Scan Acquisition for Improved Tomographic Visualization. In Proceedings of the 2019 IEEE 16th India Council International Conference (INDICON), Rajkot, India, 13–15 December 2019; IEEE: New York, NY, USA, 2019; pp. 1–4. [Google Scholar]
- Frantz, D.D.; Wiles, A.; Leis, S.; Kirsch, S. Accuracy assessment protocols for electromagnetic tracking systems. Phys. Med. Biol. 2003, 48, 2241–2251. [Google Scholar] [CrossRef] [PubMed]
- Heunis, C.M.; Wotte, Y.P.; Sikorski, J.; Furtado, G.P.; Misra, S. The ARMM system-autonomous steering of magnetically-actuated catheters: Towards endovascular applications. IEEE Robot. Autom. Lett. 2020, 5, 704–711. [Google Scholar] [CrossRef]
- Khan, F.; Donder, A.; Galvan, S.; y Baena, F.R.; Misra, S. Pose Measurement of Flexible Medical Instruments using Fiber Bragg Gratings in Multi-Core Fiber. IEEE Sens. J. 2020. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3D shapes. Proc. Sens. Fusion IV Control Paradig. Data Struct. 1922, 1611, 586–606. [Google Scholar]
- Koo, B.B.; Blackwell, T.; Ancoli-Israel, S.; Stone, K.L.; Stefanick, M.L.; Redline, S. Osteoporotic Fractures in Men (MrOS) Study Group. Association of incident cardiovascular disease with periodic limb movements during sleep in older men: Outcomes of sleep disorders in older men (MrOS) study. Circulation 2011. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guerrero, J.; Salcudean, S.E.; McEwen, J.; Masri, B.A.; Nicolaou, S. Real-time vessel segmentation and tracking for ultrasound imaging applications. IEEE Trans. Med. Imaging 2007, 26, 1079–1090. [Google Scholar] [CrossRef]
- Friedland, N.; Adam, D. Automatic ventricular cavity boundary detection from sequential ultrasound images using simulated annealing. IEEE Trans. Med. Imaging 1989, 8, 344–353. [Google Scholar] [CrossRef]
- Maggi, L.E.; Von Krüger, M.A.; Pereira, W.C.A.; Monteiro, E.E.C. Development of silicon-based materials for ultrasound biological phantoms. IEEE Int. Ultrason. Symp. (IUS) 2009, 1962–1965. [Google Scholar] [CrossRef]
- Elatta, A.; Gen, L.P.; Zhi, F.L.; Daoyuan, Y.; Fei, L. An overview of robot calibration. Inform. Technol. J. 2004, 3, 74–78. [Google Scholar] [CrossRef] [Green Version]
- Heunis, C.M.; Barata, B.F.; Furtado, G.P.; Misra, S. Collaborative Surgical Robots: Optical Tracking During Endovascular Surgery. IEEE Robot. Autom. Mag. 2020. [Google Scholar] [CrossRef]
- Rogers, S.; Carreira, J.; Thompson, R.; Morais, A.; Miller, C.; Wein, W.; Ghosh, J.; McCollum, C. An Ex Vivo Evaluation of Tomographic 3D Ultrasound, B-Mode Ultrasound, CT In addition, MR Imaging to Measure Artery Diameter, Length and Wall Volume. Ultrasound Med. Biol. 2019, 45, 2819–2829. [Google Scholar] [CrossRef] [PubMed]
- Zijdenbos, A.P.; Dawant, B.M.; Margolin, R.A.; Palmer, A.C. Morphometric analysis of white matter lesions in MR images: Method and validation. IEEE Trans. Med. Imaging 1994, 13, 716–724. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Osnabrugge, R.L.; Mylotte, D.; Head, S.J.; Mieghem, N.M.V.; Nkomo, V.T.; LeReun, C.M.; Bogers, A.J.; Piazza, N.; Kappetein, A.P. Aortic Stenosis in the Elderly. J. Am. Coll. Cardiol. 2013, 62, 1002–1012. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kwoh, Y.S.; Hou, J.; Jonckheere, E.A.; Hayati, S. A robot with improved absolute positioning accuracy for CT guided stereotactic brain surgery. IEEE Trans. Biomed. Eng. 1988, 35, 153–160. [Google Scholar] [CrossRef] [PubMed]
- Kenngott, H.; Wegner, I.; Neuhaus, J.; Nickel, F.; Fischer, L.; Gehrig, T.; Meinzer, H.; Müller-Stich, B. Magnetic tracking in the operation room using the da Vinci® telemanipulator is feasible. J. Robot. Surg. 2013, 7, 59–64. [Google Scholar] [CrossRef] [Green Version]
- Miccini, M.; Cassini, D.; Gregori, M.; Gazzanelli, S.; Cassibba, S.; Biacchi, D. Ultrasound-guided placement of central venous port systems via the right internal jugular vein: Are chest x-ray and/or fluoroscopy needed to confirm the correct placement of the device? World J. Surg. 2016, 40, 2353–2358. [Google Scholar] [CrossRef]
- Bronnikov, K.; Wolf, A.; Yakushin, S.; Dostovalov, A.; Egorova, O.; Zhuravlev, S.; Semjonov, S.; Wabnitz, S.; Babin, S. Durable shape sensor based on FBG array inscribed in polyimide-coated multicore optical fiber. Opt. Express 2019, 27, 38421–38434. [Google Scholar] [CrossRef] [Green Version]
- Sim, I.; Gorman, P.; Greenes, R.A.; Haynes, R.B.; Kaplan, B.; Lehmann, H.; Tang, P.C. Clinical decision support systems for the practice of evidence-based medicine. J. Am. Med. Inform. Assoc. 2001, 8, 527–534. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Parameter | Symbol | Value | |
|---|---|---|---|
| Position | Positioning setpoint | 0.5 mm | |
| Velocity threshold | 25 mm | ||
| Integral time constant | 20 | ||
| Maximum transducer linear velocity | 50 mm\/s | ||
| Orientation | Orientation setpoint | 0.01 rad | |
| Orientation threshold | 0.1 rad | ||
| Maximum transducer angular velocity | 0.1 rad/s | ||
| Force | Contact force setpoint | 0.8 N | |
| Proportional gain | 0.5 | ||
| Integral gain | 0.7 | ||
| Value | Asymptotic Standard Error a | Approximate Tb | Approximate Significance | ||||||
|---|---|---|---|---|---|---|---|---|---|
| S.A | S.B | S.A | S.B | S.A | S.B | S.A | S.B | ||
| Lambda | Symmetric | 0.625 | 0.412 | 0.138 | 0.166 | 3.563 | 2.067 | 0.000 | 0.039 |
| Goodman & Kruskal tau | Scenario (dependent) | 0.380 | 0.156 | 0.110 | 0.093 | - | - | 0.000 | 0.008 |
| Positioning error (dependent) | 0.637 | 0.304 | 0.102 | 0.127 | - | - | 0.000 | 0.009 | |
| Uncertainty Coefficient | Symmetric | 0.508 | 0.216 | 0.084 | 0.091 | 5.597 | 2.283 | 0.000 | 0.003 |
| Scenario (dependent) | 0.431 | 0.184 | 0.072 | 0.076 | 5.597 | 2.283 | 0.000 | 0.003 | |
| Positioning error (dependent) | 0.618 | 0.261 | 0.105 | 0.114 | 5.597 | 2.283 | 0.000 | 0.003 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heunis, C.M.; Šuligoj, F.; Fambuena Santos, C.; Misra, S. Real-Time Multi-Modal Sensing and Feedback for Catheterization in Porcine Tissue. Sensors 2021, 21, 273. https://doi.org/10.3390/s21010273
Heunis CM, Šuligoj F, Fambuena Santos C, Misra S. Real-Time Multi-Modal Sensing and Feedback for Catheterization in Porcine Tissue. Sensors. 2021; 21(1):273. https://doi.org/10.3390/s21010273
Chicago/Turabian StyleHeunis, Christoff M., Filip Šuligoj, Carlos Fambuena Santos, and Sarthak Misra. 2021. "Real-Time Multi-Modal Sensing and Feedback for Catheterization in Porcine Tissue" Sensors 21, no. 1: 273. https://doi.org/10.3390/s21010273
APA StyleHeunis, C. M., Šuligoj, F., Fambuena Santos, C., & Misra, S. (2021). Real-Time Multi-Modal Sensing and Feedback for Catheterization in Porcine Tissue. Sensors, 21(1), 273. https://doi.org/10.3390/s21010273