Classifier-Based Data Transmission Reduction in Wearable Sensor Network for Human Activity Monitoring




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Works and Contribution
2.1. Data Aggregation
2.2. Data Compression
2.3. Adaptive Sampling
2.4. Data Prediction
2.5. Other Methods
2.6. Our Contribution
- A new concept using embedded classifiers for data transmission reduction in sensor networks is presented. According to the best authors’ knowledge the embedded machine learning algorithms have not been used so far in this context. Existing works are limited to simpler case, where individual IoT devices are considered.
- An algorithm is introduced for preparing a data set, which facilitate training of the classifiers designed to eliminate unnecessary data transmissions.
- Feasibility and effectiveness of the proposed approach was confirmed in experiments with wearable sensor network for human activity monitoring.
3. Proposed Method
3.1. Overview of the Method
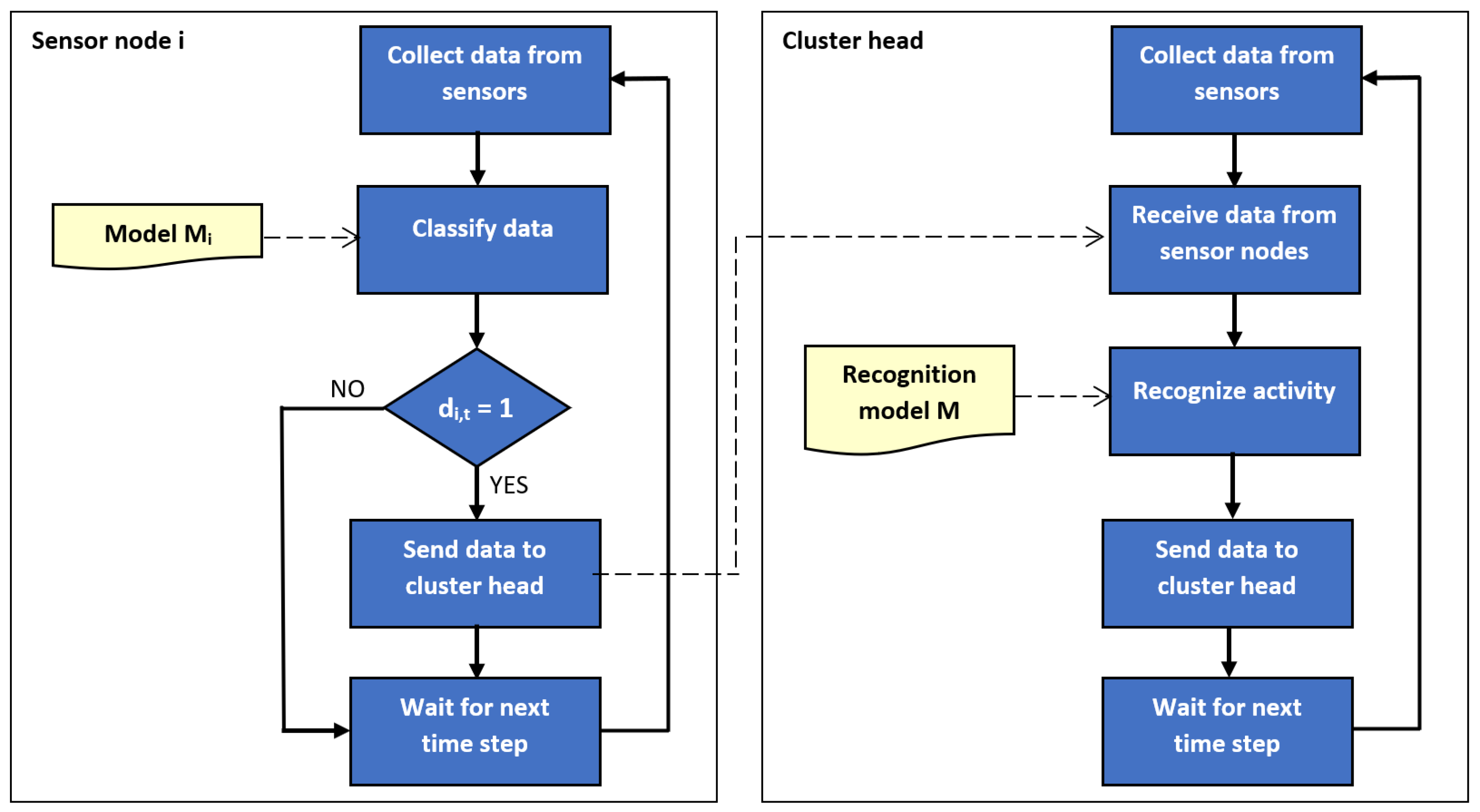
| Algorithm 1 Operation of sensor node i |
|
| Algorithm 2 Operation of cluster head (node ) |
|
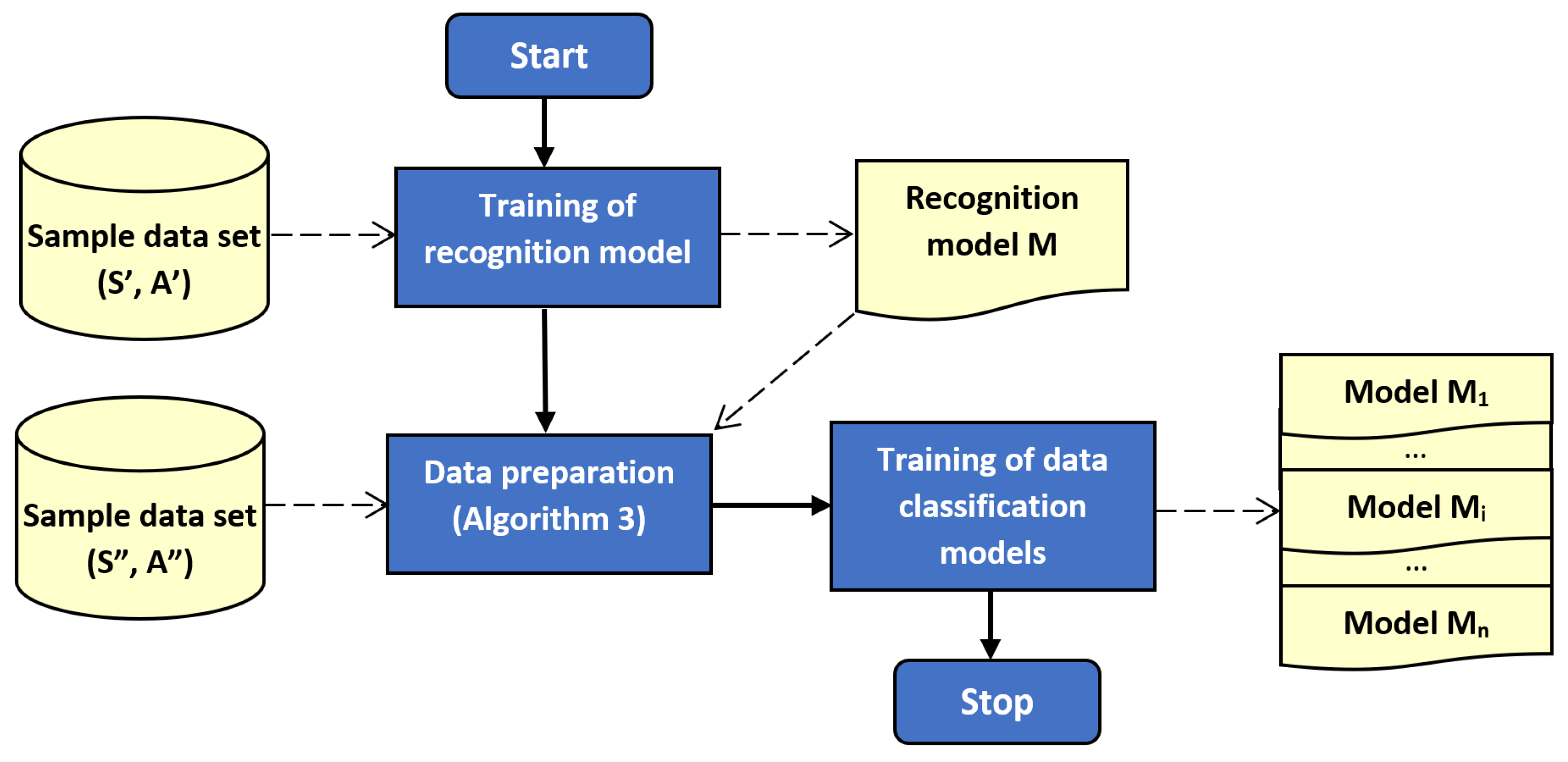
- Collect training data.
- Divide the training data into two samples.
- Train recognition model M using the first data sample.
- Prepare data for training classification models based on the second data sample.
- Train classification models .
3.2. Activity Recognition Model
3.3. Models for Sensor Data Classification
| Algorithm 3 Data preparation for training of models |
|
4. Experiments
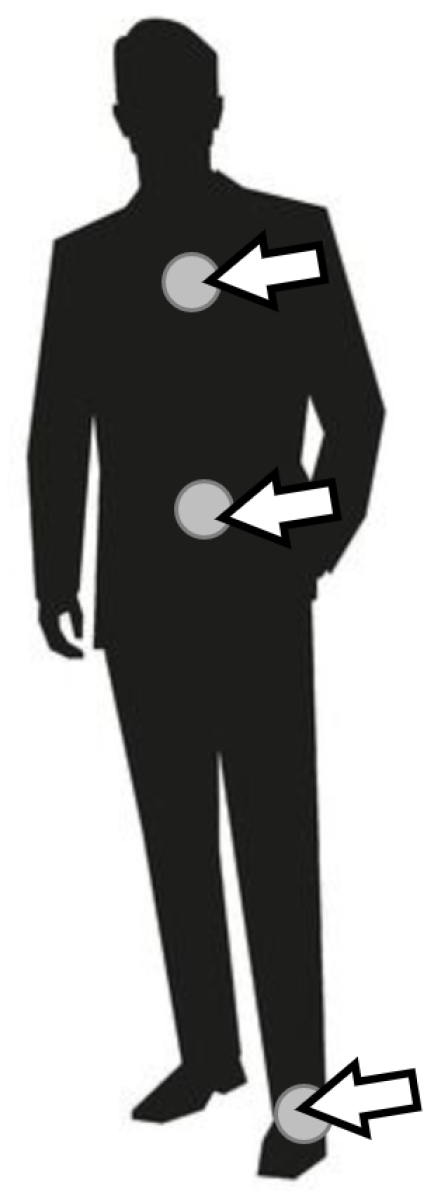
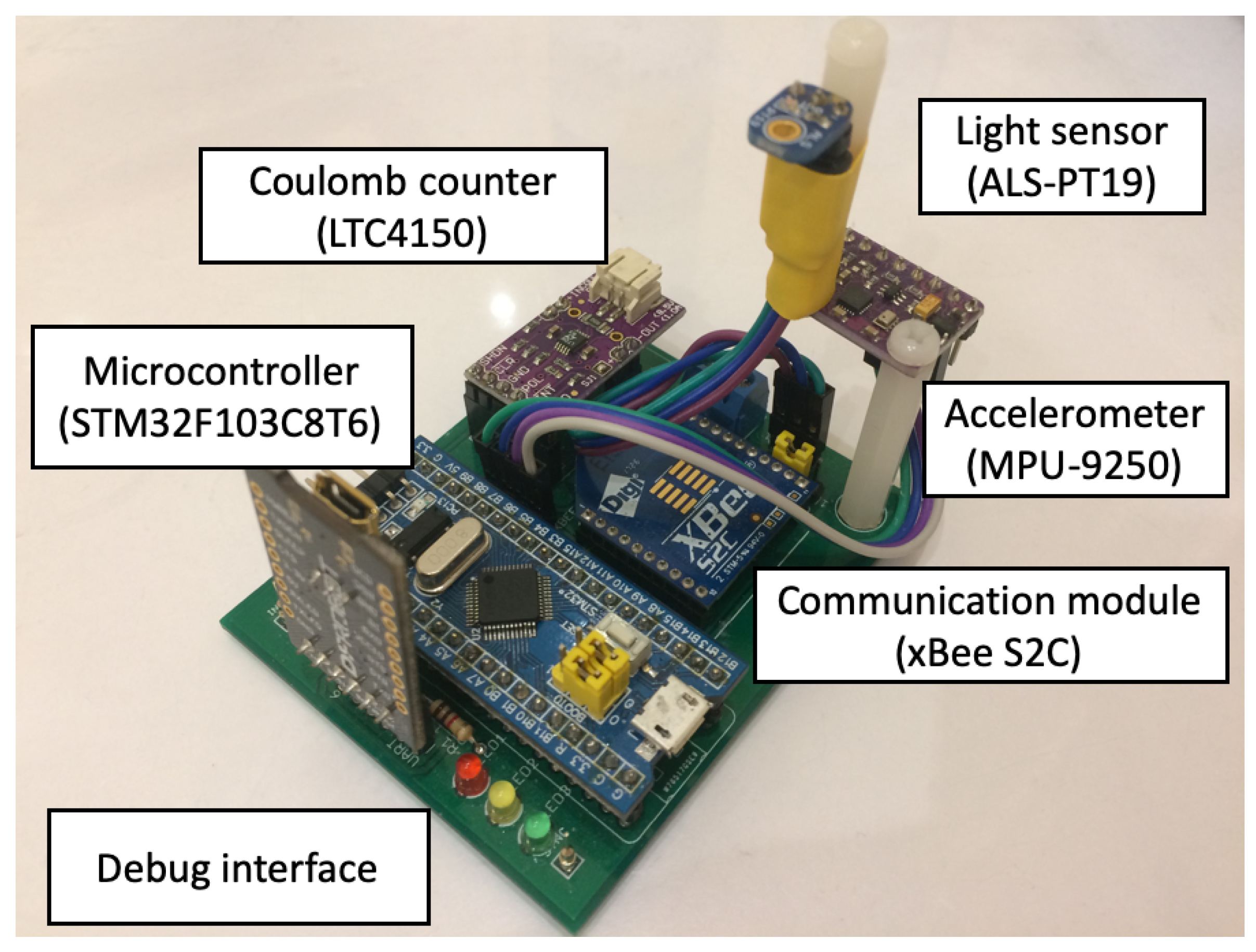
4.1. Experimental Testbed
4.2. Results and Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| A | Time series containing information about observed human activities |
| Part of time series A used to train the recognition model M | |
| Part of time series A used to train the classification models | |
| Actual human activity at time step t | |
| Human activity determined at time step t by recognition algorithm | |
| C | Classification algorithm (binary classifier) |
| Binary decision related to data transmission from sensor node i at time step t | |
| D | Time series of of binary decisions |
| i | Identifier of sensor node |
| I | Set of identifiers of sensor nodes |
| Identifier of cluster head | |
| M | Recognition model used by cluster head to recognize human activities |
| Classification model used by sensor node i for selecting the data that have to be transmitted | |
| m | Number of time steps |
| n | Total number of sensor nodes |
| R | Activity recognition algorithm |
| S | Multivariate time series of preprocessed sensor readings from n sensor nodes |
| Part of time series S used to train the recognition model M | |
| Part of time series S used to train the classification models | |
| Set of data transmitted to cluster head from sensor nodes at time step t | |
| Set of preprocessed sensor readings collected by sensor node i at time step t | |
| Sub-model for recognition of human activity based on data from sensor nodes belonging to subset Z | |
| t | Time step |
| T | Time period (ordered set of time steps) |
References
- Giannini, P.; Bassani, G.; Avizzano, C.A.; Filippeschi, A. Wearable Sensor Network for Biomechanical Overload Assessment in Manual Material Handling. Sensors 2020, 20, 3877. [Google Scholar] [CrossRef]
- Xu, Z.; Zhao, J.; Yu, Y.; Zeng, H. Improved 1D-CNNs for behavior recognition using wearable sensor network. Comput. Commun. 2020, 151, 165–171. [Google Scholar] [CrossRef]
- Ghasemzadeh, H.; Amini, N.; Saeedi, R.; Sarrafzadeh, M. Power-aware computing in wearable sensor networks: An optimal feature selection. IEEE Trans. Mob. Comput. 2014, 14, 800–812. [Google Scholar] [CrossRef]
- Jarwan, A.; Sabbah, A.; Ibnkahla, M. Data transmission reduction schemes in WSNs for efficient IoT systems. IEEE J. Sel. Areas Commun. 2019, 37, 1307–1324. [Google Scholar] [CrossRef]
- Płaczek, B.; Bernaś, M. Uncertainty-based information extraction in wireless sensor networks for control applications. Ad Hoc Netw. 2014, 14, 106–117. [Google Scholar] [CrossRef] [Green Version]
- Lewandowski, M.; Bernas, M.; Loska, P.; Szymała, P.; Płaczek, B. Extending Lifetime of Wireless Sensor Network in Application to Road Traffic Monitoring. In International Conference on Computer Networks; Springer: Cham, Switzerland, 2019; pp. 112–126. [Google Scholar]
- Liu, X.; Yu, J.; Li, F.; Lv, W.; Wang, Y.; Cheng, X. Data Aggregation in Wireless Sensor Networks: From the Perspective of Security. IEEE Internet Things J. 2020, 7, 6495–6513. [Google Scholar] [CrossRef]
- Dehkordi, S.A.; Farajzadeh, K.; Rezazadeh, J.; Farahbakhsh, R.; Sandrasegaran, K.; Dehkordi, M.A. A survey on data aggregation techniques in IoT sensor networks. Wirel. Netw. 2020, 26, 1243–1263. [Google Scholar] [CrossRef]
- Feng, C.; Li, Z.; Jiang, S.; Jing, W. Delay-constrained data aggregation scheduling in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Ghasemzadeh, H.; Jafari, R. Data aggregation in body sensor networks: A power optimization technique for collaborative signal processing. In Proceedings of the 2010 7th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Boston, MA, USA, 21–25 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–9. [Google Scholar]
- Shen, B.; Fu, J.S. A method of data aggregation for wearable sensor systems. Sensors 2016, 16, 954. [Google Scholar] [CrossRef] [Green Version]
- Raj, A.S.; Chinnadurai, M. Energy efficient routing algorithm in wireless body area networks for smart wearable patches. Comput. Commun. 2020, 153, 85–94. [Google Scholar]
- Lin, J.W.; Liao, S.W.; Leu, F.Y. Sensor data compression using bounded error piecewise linear approximation with resolution reduction. Energies 2019, 12, 2523. [Google Scholar] [CrossRef] [Green Version]
- Pacharaney, U.S.; Gupta, R.K. Clustering and compressive data gathering in wireless sensor network. Wirel. Pers. Commun. 2019, 109, 1311–1331. [Google Scholar] [CrossRef]
- Liu, J.; Chen, F.; Wang, D. Data compression based on stacked RBM-AE model for wireless sensor networks. Sensors 2018, 18, 4273. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, C.H.; Tseng, Y.C. Data compression by temporal and spatial correlations in a body-area sensor network: A case study in pilates motion recognition. IEEE Trans. Mob. Comput. 2010, 10, 1459–1472. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Xiong, D.; Guo, L.; Wang, J. A compressed sensing-based wearable sensor network for quantitative assessment of stroke patients. Sensors 2016, 16, 202. [Google Scholar] [CrossRef] [Green Version]
- Natarajan, V.; Vyas, A. Power efficient compressive sensing for continuous monitoring of ECG and PPG in a wearable system. In Proceedings of the IEEE 3rd World Forum on Internet of Things (WF-IoT), Reston, VA, USA, 12–14 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 336–341. [Google Scholar]
- Huang, H.; Hu, S.; Sun, Y. Energy-efficient ECG compression in wearable body sensor network by leveraging empirical mode decomposition. In Proceedings of the 2018 IEEE EMBS International Conference on Biomedical & Health Informatics (BHI), Las Vegas, NV, USA, 4–7 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 149–152. [Google Scholar]
- Lou, P.; Shi, L.; Zhang, X.; Xiao, Z.; Yan, J. A Data-Driven Adaptive Sampling Method Based on Edge Computing. Sensors 2020, 20, 2174. [Google Scholar] [CrossRef] [Green Version]
- Cai, W.; Zhang, M. Spatiotemporal correlation–based adaptive sampling algorithm for clustered wireless sensor networks. Int. J. Distrib. Sens. Netw. 2018, 14. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, L.; Ulapane, N.; Miro, J.V. Adaptive sampling for spatial prediction in environmental monitoring using wireless sensor networks: A review. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 346–351. [Google Scholar]
- Miskowicz, M. Send-on-delta concept: An event-based data reporting strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef] [Green Version]
- Diaz-Cacho, M.; Delgado, E.; Barreiro, A.; Falcón, P. Basic send-on-delta sampling for signal tracking-error reduction. Sensors 2017, 17, 312. [Google Scholar] [CrossRef] [Green Version]
- Mesin, L. A neural algorithm for the non-uniform and adaptive sampling of biomedical data. Comput. Biol. Med. 2016, 71, 223–230. [Google Scholar] [CrossRef] [Green Version]
- Rezaie, H.; Ghassemian, M. An adaptive algorithm to improve energy efficiency in wearable activity recognition systems. IEEE Sens. J. 2017, 17, 5315–5323. [Google Scholar] [CrossRef]
- Augustyniak, P. Adaptive Sampling of the Electrocardiogram Based on Generalized Perceptual Features. Sensors 2020, 20, 373. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shu, T.; Chen, J.; Bhargava, V.K.; de Silva, C.W. An energy-efficient dual prediction scheme using LMS filter and LSTM in wireless sensor networks for environment monitoring. IEEE Internet Things J. 2019, 6, 6736–6747. [Google Scholar] [CrossRef]
- Ganjewar, P.; Barani, S.; Wagh, S.J. A hierarchical fractional LMS prediction method for data reduction in a wireless sensor network. Ad Hoc Netw. 2019, 87, 113–127. [Google Scholar] [CrossRef]
- Dias, G.M.; Bellalta, B.; Oechsner, S. A survey about prediction-based data reduction in wireless sensor networks. Acm Comput. Surv. 2016, 49, 1–35. [Google Scholar] [CrossRef] [Green Version]
- Suh, Y.S. Send-on-delta sensor data transmission with a linear predictor. Sensors 2007, 7, 537–547. [Google Scholar] [CrossRef] [Green Version]
- Feng, X.; Zhenzhen, X.; Lin, Y.; Weifeng, S.; Mingchu, L. Prediction-based data transmission for energy conservation in wireless body sensors. In Proceedings of the 2010 The 5th Annual ICST Wireless Internet Conference (WICON), Singapore, 1–3 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–9. [Google Scholar]
- Mishra, A.; Chakraborty, S.; Li, H.; Agrawal, D.P. Error minimization and energy conservation by predicting data in wireless body sensor networks using artificial neural network and analysis of error. In Proceedings of the 2014 IEEE 11th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 165–170. [Google Scholar]
- Mejia, J.; Ochoa-Zezzatti, A.; Cruz-Mejía, O.; Mederos, B. Prediction of time series using wavelet Gaussian process for wireless sensor networks. Wirel. Netw. 2020, 26, 5751–5758. [Google Scholar] [CrossRef]
- Putra, I.P.E.S.; Brusey, J.; Gaura, E.; Vesilo, R. An event-triggered machine learning approach for accelerometer-based fall detection. Sensors 2018, 18, 20. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Torres, R.; Torres-Huitzil, C.; Galeana-Zapién, H. A Cognitive-Inspired Event-Based Control for Power-Aware Human Mobility Analysis in IoT Devices. Sensors 2019, 19, 832. [Google Scholar] [CrossRef] [Green Version]
- Socas, R.; Dormido, S.; Dormido, R.; Fabregas, E. Event-based control strategy for mobile robots in wireless environments. Sensors 2015, 15, 30076–30092. [Google Scholar] [CrossRef] [Green Version]
- Ullah, F.; Abdullah, A.H.; Kaiwartya, O.; Kumar, S.; Arshad, M.M. Medium Access Control (MAC) for Wireless Body Area Network (WBAN): Superframe structure, multiple access technique, taxonomy, and challenges. Hum. Centric Comput. Inf. Sci. 2017, 7, 34. [Google Scholar] [CrossRef] [Green Version]
- Aderohunmu, F.A.; Paci, G.; Brunelli, D.; Deng, J.D.; Benini, L.; Purvis, M. An application-specific forecasting algorithm for extending wsn lifetime. In Proceedings of the 2013 IEEE International Conference on Distributed Computing in Sensor Systems, Cambridge, MA, USA, 20–23 May 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 374–381. [Google Scholar]
- Ignatov, A. Real-time human activity recognition from accelerometer data using Convolutional Neural Networks. Appl. Soft Comput. 2018, 62, 915–922. [Google Scholar] [CrossRef]
- Murad, A.; Pyun, J.Y. Deep recurrent neural networks for human activity recognition. Sensors 2017, 17, 2556. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zubair, M.; Song, K.; Yoon, C. Human activity recognition using wearable accelerometer sensors. In Proceedings of the 2016 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Seoul, Korea, 26–28 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Zhao, Z.; Wang, J.; Zhao, X.; Peng, C.; Guo, Q.; Wu, B. NaviLight: Indoor localization and navigation under arbitrary lights. In Proceedings of the IEEE INFOCOM 2017-IEEE Conference on Computer Communications, Atlanta, GA, USA, 1–4 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–9. [Google Scholar]
- Ravi, N.; Iftode, L. FiatLux: Fingerprinting rooms using light intensity. In Proceedings of the 5th International Conference on Pervasive Computing, Toronto, ON, Canada, 13–16 May 2007. [Google Scholar]
- Lewandowski, M.; Płaczek, B. An Event-Aware Cluster-Head Rotation Algorithm for Extending Lifetime of Wireless Sensor Network with Smart Nodes. Sensors 2019, 19, 4060. [Google Scholar] [CrossRef] [Green Version]
- Berthold, M.R.; Cebron, N.; Dill, F.; Gabriel, T.R.; Kötter, T.; Meinl, T.; Ohl, P.; Thiel, K.; Wiswedel, B. KNIME-the Konstanz information miner: Version 2.0 and beyond. ACM Sigkdd Explor. Newsl. 2009, 11, 26–31. [Google Scholar] [CrossRef] [Green Version]
- Berthold, M.R.; Diamond, J. Constructive training of probabilistic neural networks. Neurocomputing 1998, 19, 167–183. [Google Scholar] [CrossRef] [Green Version]
- Fan, R.E.; Chen, P.H.; Lin, C.J. Working set selection using second order information for training support vector machines. J. Mach. Learn. Res. 2005, 6, 1889–1918. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Aha, D.W.; Kibler, D.; Albert, M.K. Instance-based learning algorithms. Mach. Learn. 1991, 6, 37–66. [Google Scholar] [CrossRef] [Green Version]
- Kiranmai, S.A.; Laxmi, A.J. Data mining for classification of power quality problems using WEKA and the effect of attributes on classification accuracy. Prot. Control. Mod. Power Syst. 2018, 3, 29. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Mishina, Y.; Murata, R.; Yamauchi, Y.; Yamashita, T.; Fujiyoshi, H. Boosted random forest. IEICE Trans. Inf. Syst. 2015, 98, 1630–1636. [Google Scholar] [CrossRef] [Green Version]
- Buschjager, S.; Chen, K.H.; Chen, J.J.; Morik, K. Realization of Random Forest for Real-Time Evaluation through Tree Framing. In Proceedings of the 2018 IEEE International Conference on Data Mining (ICDM), Singapore, 17–20 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 19–28. [Google Scholar]
- Küppers, F.; Albers, J.; Haselhoff, A. Random Forest on an Embedded Device for Real-time Machine State Classification. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruña, Spain, 2–6 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lewandowski, M.; Płaczek, B.; Bernas, M. Classifier-Based Data Transmission Reduction in Wearable Sensor Network for Human Activity Monitoring. Sensors 2021, 21, 85. https://doi.org/10.3390/s21010085
Lewandowski M, Płaczek B, Bernas M. Classifier-Based Data Transmission Reduction in Wearable Sensor Network for Human Activity Monitoring. Sensors. 2021; 21(1):85. https://doi.org/10.3390/s21010085
Chicago/Turabian StyleLewandowski, Marcin, Bartłomiej Płaczek, and Marcin Bernas. 2021. "Classifier-Based Data Transmission Reduction in Wearable Sensor Network for Human Activity Monitoring" Sensors 21, no. 1: 85. https://doi.org/10.3390/s21010085
APA StyleLewandowski, M., Płaczek, B., & Bernas, M. (2021). Classifier-Based Data Transmission Reduction in Wearable Sensor Network for Human Activity Monitoring. Sensors, 21(1), 85. https://doi.org/10.3390/s21010085