
Clusters of Spin Valve Sensors in 3D Magnetic Field of a Label


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
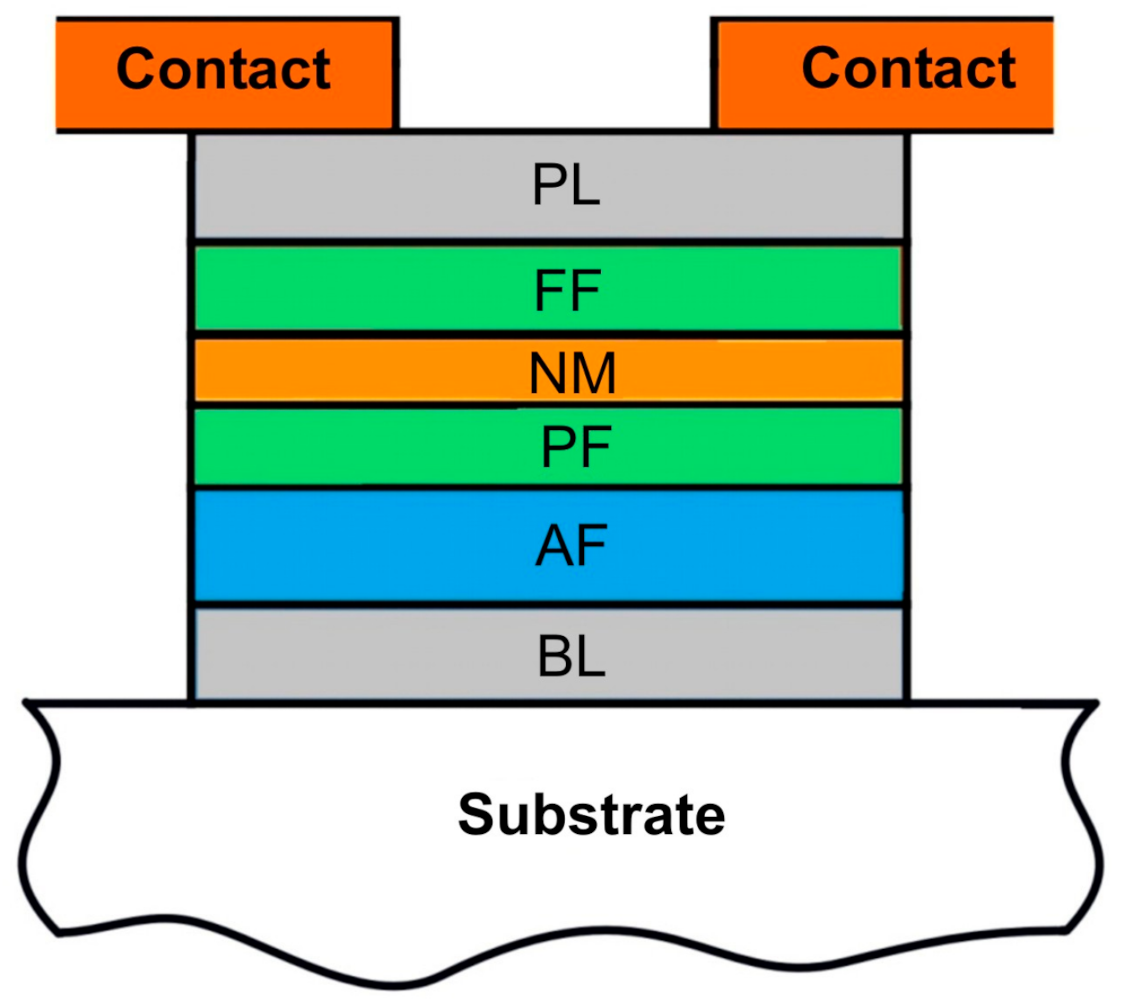
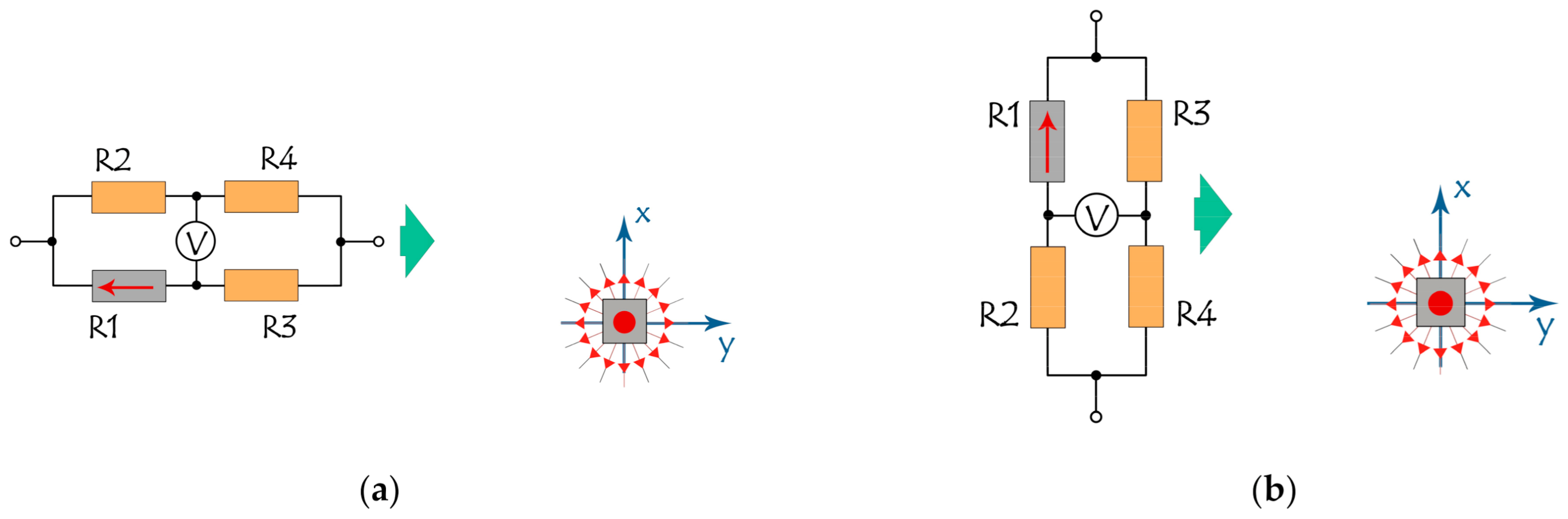
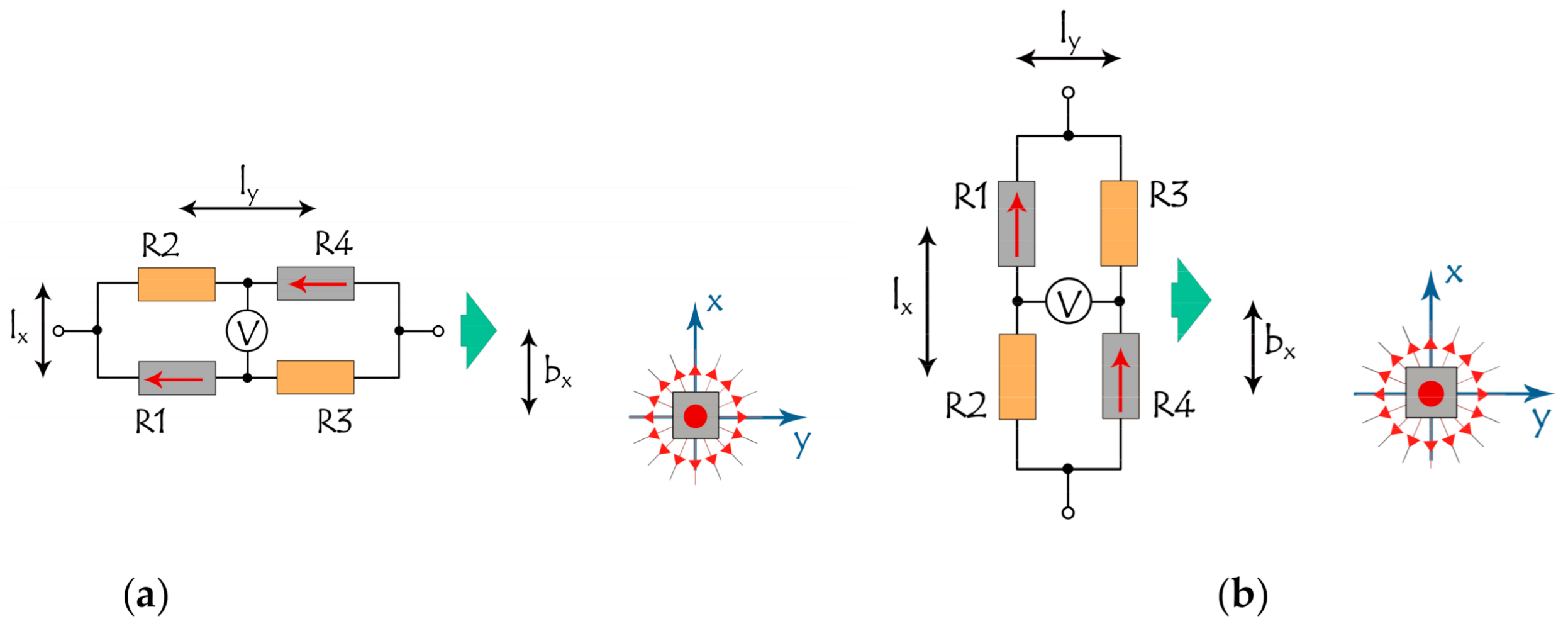
2.1. Simulated Sensors and Magnetic Label
2.2. Simulation Model
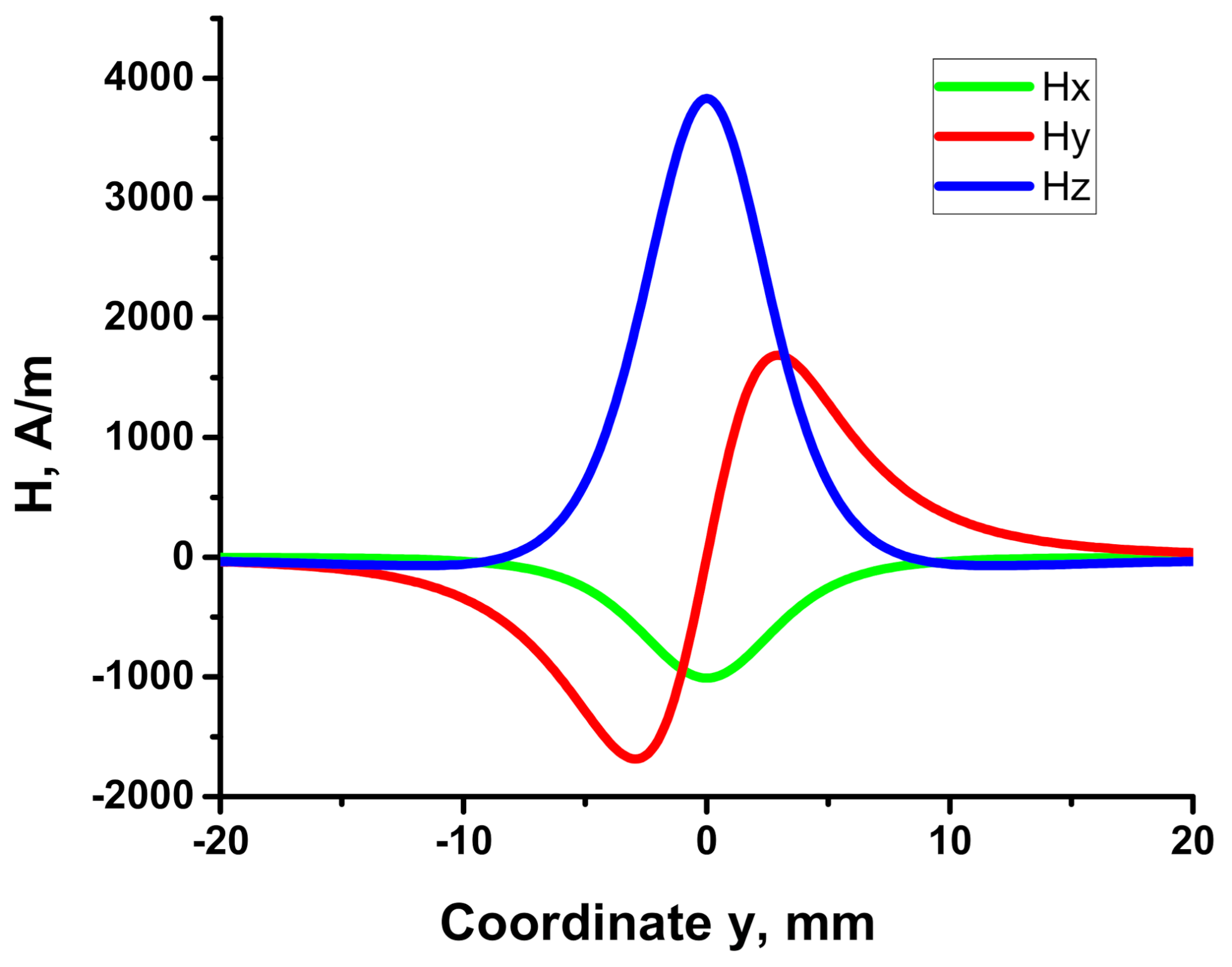
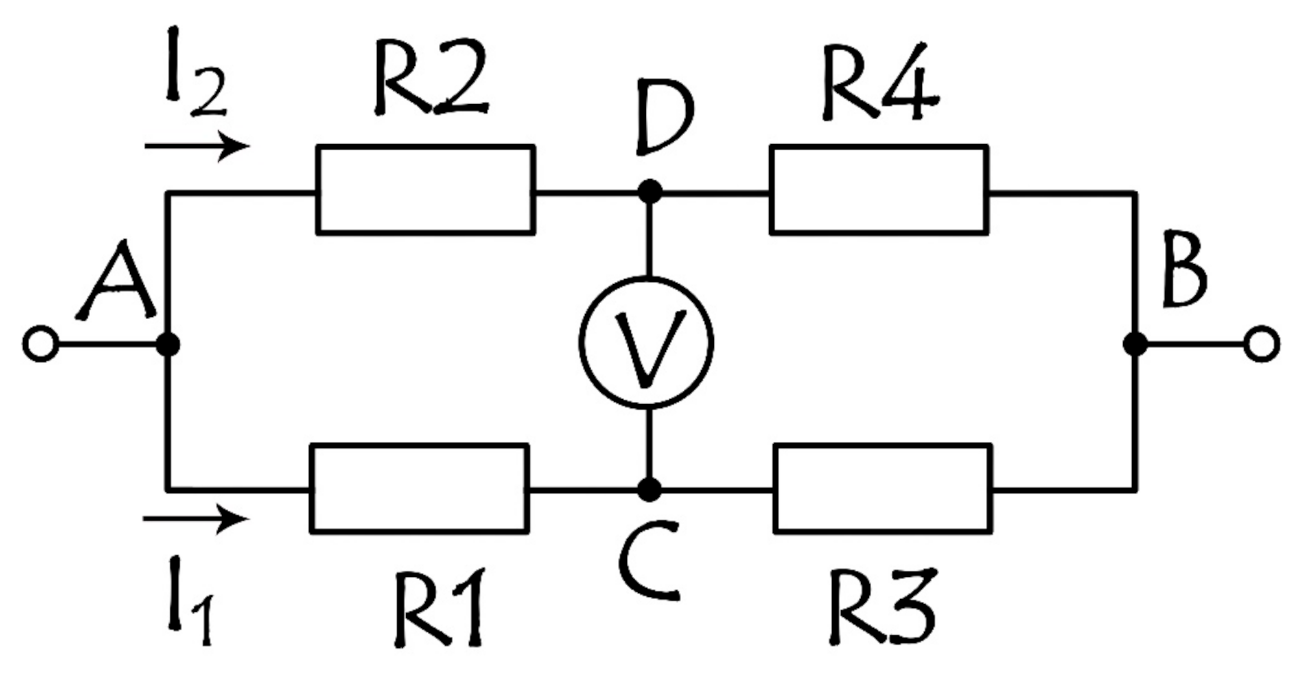
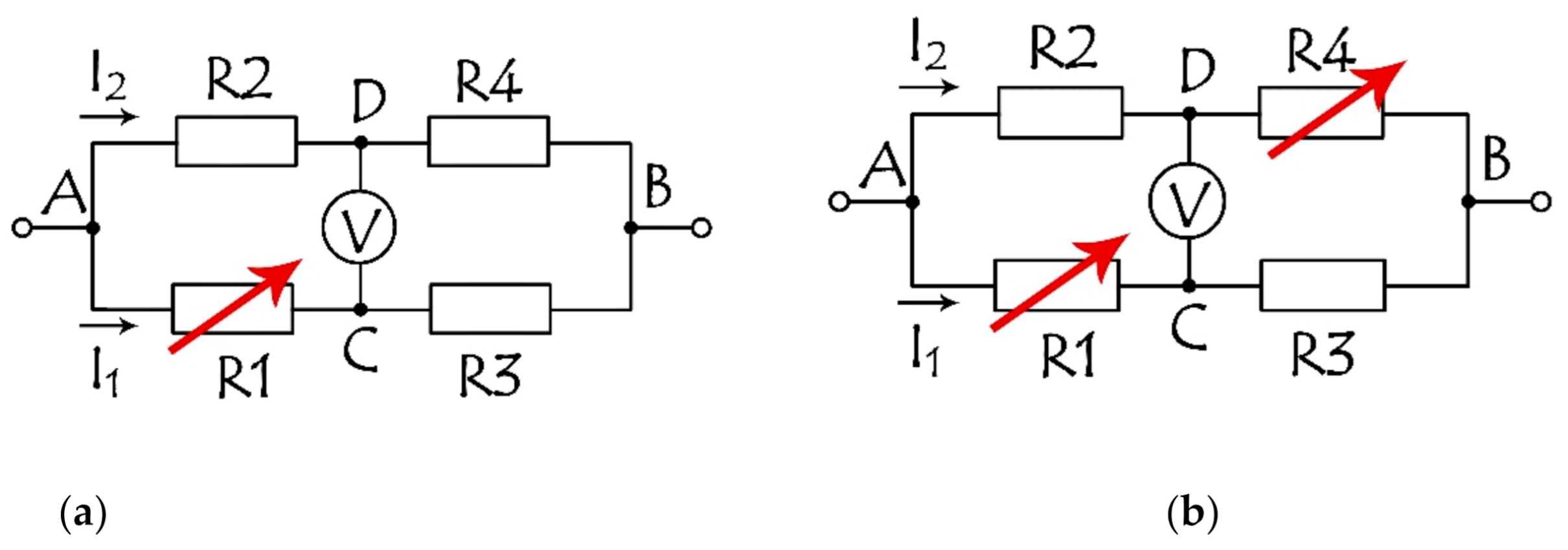
2.3. Interaction of the Magnetic Label and the Cluster of SV Sensors
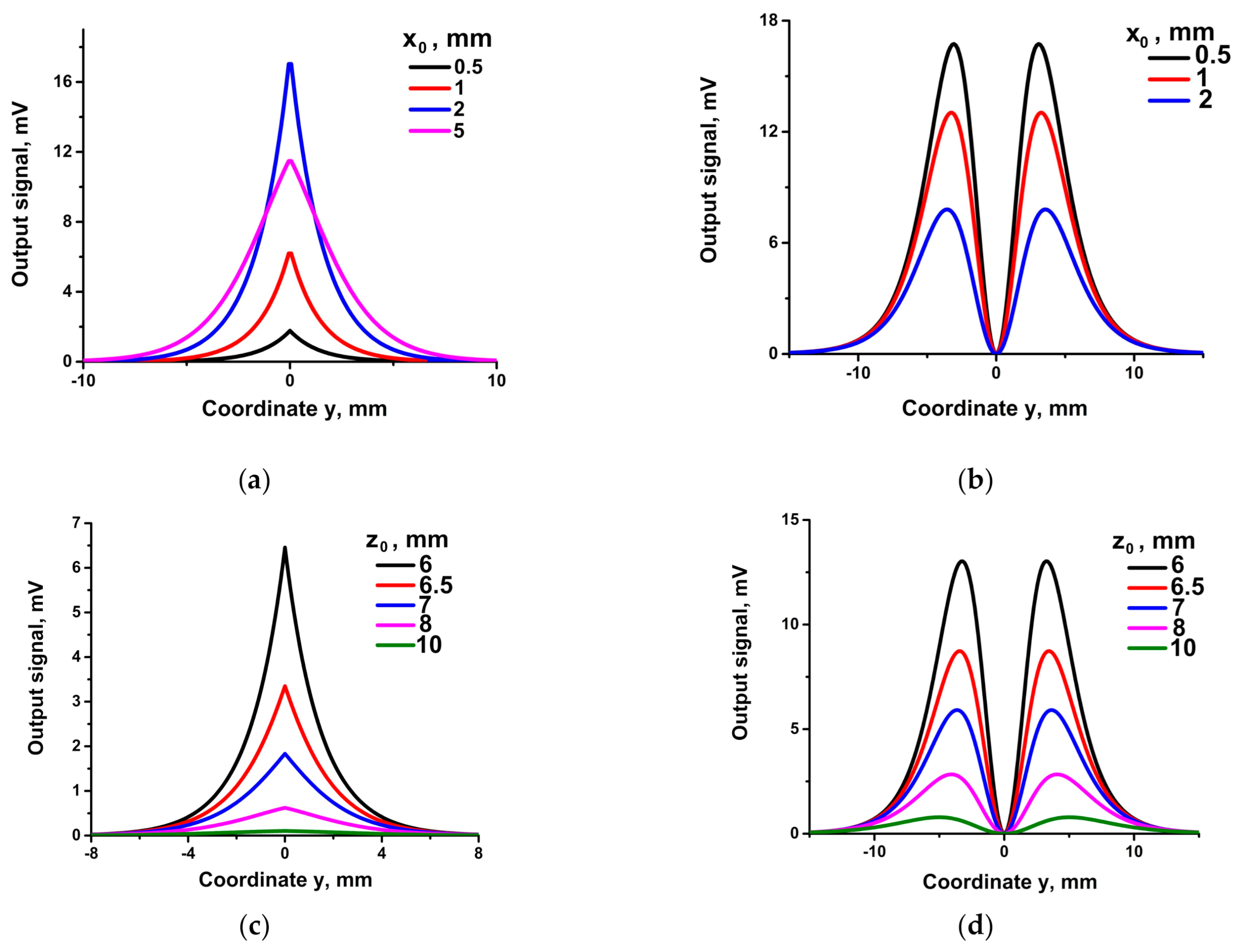
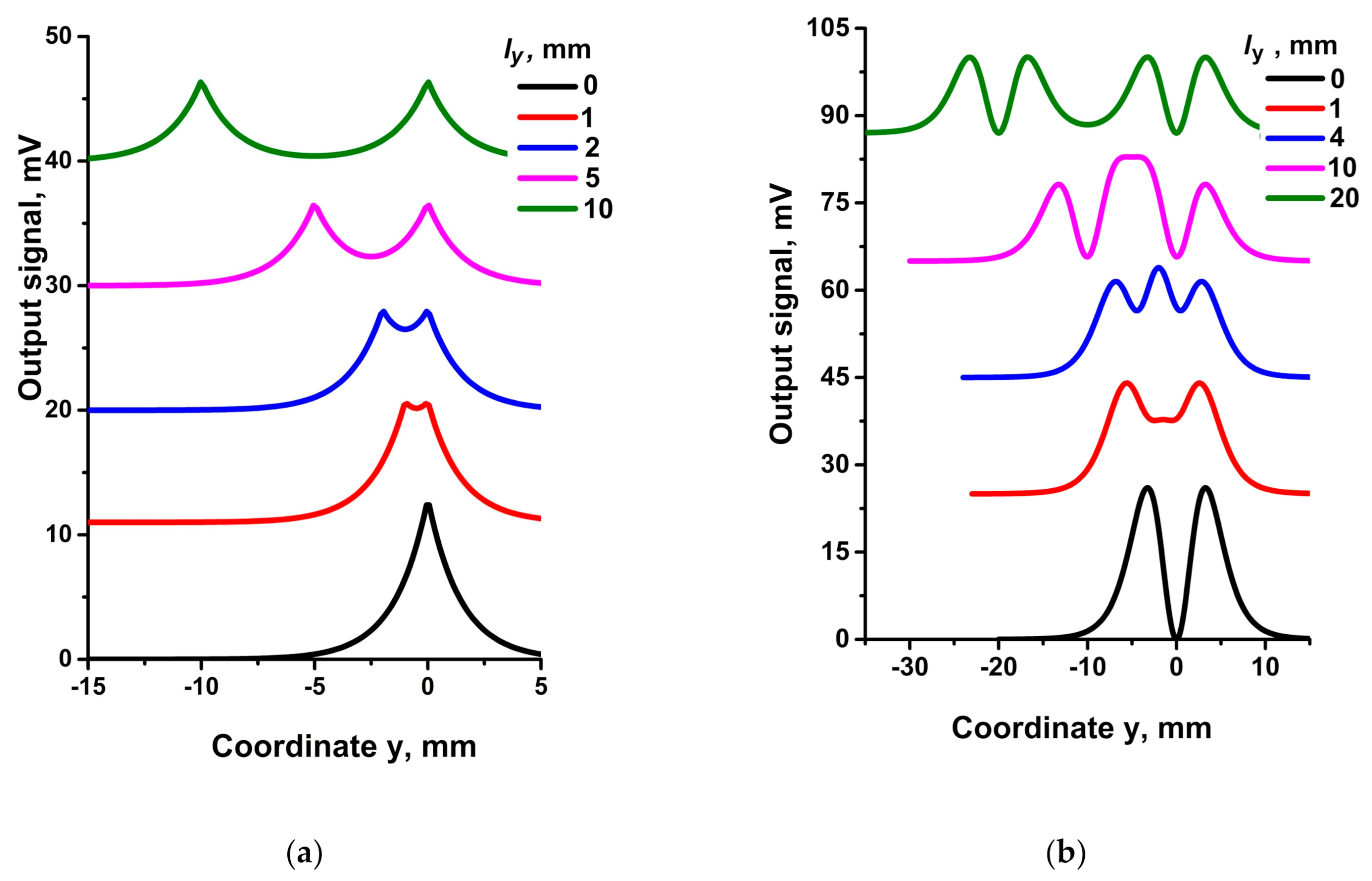
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Grosz, A.; Haji-Sheikh, M.J. High Sensitivity Magnetometers. In Smart Sensors, Measurement and Instrumentation 19; Mukhopadhyay, S.C., Ed.; Springer Nature Switzerland AG: Cham, Switzerland, 2017; p. 576. [Google Scholar] [CrossRef]
- Murzin, D.; Mapps, D.J.; Levada, K.; Belyaev, V.; Omelyanchic, A.; Panina, L.; Rodionova, V. Ultrasensitive Magnetic Field Sensors for Biomedical Applications. Sensors 2020, 20, 1569. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, C.; Zhu, K.; De Freitas, S.C.; Chang, J.Y.; Davies, J.E.; Eames, P.; Freitas, P.P.; Kazakova, O.; Kim, C.; Leung, C.W.; et al. Magnetoresistive Sensor Development Roadmap (Non-Recording Applications). IEEE Trans. Magn. 2019, 55, 0800130. [Google Scholar] [CrossRef] [Green Version]
- Pannetier-Lecoeur, M.; Fermon, C.; Goff, G.L.; Simola, J.; Kerr, E. Femtotesla magnetic field measurement with magnetoresistive sensors. Science 2004, 304, 1648–1650. [Google Scholar] [CrossRef] [PubMed]
- Baselt, D.R.; Lee, G.U.; Natesan, M.; Metzger, S.W.; Sheehan, P.E.; Colton, R.J. A biosensor based on magnetoresistance technology. Biosens. Bioelectron. 1998, 13, 731–739. [Google Scholar] [CrossRef]
- Germano, J.; Martins, V.C.; Cardoso, F.A.; Almeida, T.M.; Sousa, L.; Freitas, P.P.; Piedade, M.S. A portable and autonomous magnetic detection platform for biosensing. Sensors 2009, 9, 4119–4137. [Google Scholar] [CrossRef] [Green Version]
- Graham, D.L.; Ferreira, H.A.; Freitas, P.P. Magnetoresistive-based biosensors and biochips. Trends Biotechnol. 2004, 22, 455–462. [Google Scholar] [CrossRef]
- Parkin, S.S.P. Flexible giant magnetoresistance sensors. Appl. Phys. Lett. 1996, 69, 3092–3094. [Google Scholar] [CrossRef]
- Uhrmann, T.; Bär, L.; Dimopoulos, T.; Wiese, N.; Rührig, M.; Lechner, A. Magnetostrictive GMR sensor on flexible polyimide substrates. J. Magn. Magn. Mater. 2006, 307, 209–211. [Google Scholar] [CrossRef]
- Karnaushenko, D.; Makarov, D.; Yan, C.; Streubel, R.; Schmidt, O. Printable giant magnetoresistive devices. Adv. Mater. 2012, 24, 4518–4522. [Google Scholar] [CrossRef]
- Gaspar, J.; Fonseca, H.; Paz, E.; Martins, M.; Valadeiro, J.; Cardoso, S.; Ferreira, R.; Freitas, P.P. Flexible magnetoresistive sensors designed for conformal integration. IEEE Trans. Magn. 2017, 53, 5300204. [Google Scholar] [CrossRef]
- Ausserlechner, U. The optimum layout for giant magneto-resistive angle sensors. IEEE Sens. J. 2010, 10, 1571–1582. [Google Scholar] [CrossRef]
- Hahn, R.; Schmidt, T.; Slatter, R.; Olberts, B.; Romera, F. Magnetoresistive angular sensors for space applications: Results of breadboard and EQM testing and lessons learned. In Proceedings of the 17th European Space Mechanism and Tribology Symposium (ESMATS), Hatfield, UK, 20–22 September 2017; pp. 1–6. [Google Scholar]
- Díaz-Michelena, M. Small Magnetic Sensors for Space Applications. Sensors 2009, 9, 2271–2288. [Google Scholar] [CrossRef]
- Sun, X.; Lui, K.S.; Wong, K.K.; Lee, W.K.; Hou, Y.; Huang, Q.; Pong, P.W. Novel application of magnetoresistive sensors for highvoltage transmission-line monitoring. IEEE Trans. Magn. 2011, 47, 2608–2611. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.Y.; Jiang, S.B.; Yeh, T.L.; Yeh, H.C.; Liu, J.Y.; Hsu, Y.H.; Ji-Yi, P. The magneto-resistive magnetometer of BCU on the Tatiana-2 satellite. Terr. Atmos. Ocean Sci. 2012, 23, 317–326. [Google Scholar] [CrossRef] [Green Version]
- Yong, O.; He, J.; Hu, J.; Wang, S.X. A current sensor based on the giant magnetoresistance effect: Design and potential smart grid applications. Sensors 2012, 12, 15520–15541. [Google Scholar] [CrossRef]
- Zhu, K.; Han, W.; Lee, W.K.; Pong, P.W.T. On-site non-invasive current monitoring of multi-core underground power cables with a magnetic-field sensing platform at a substation. IEEE Sens. J. 2017, 17, 1837–1848. [Google Scholar] [CrossRef]
- Caruso, M.J. Applications of magnetoresistive sensors in navigation systems. Prog. Technol. 1998, 72, 159–168. [Google Scholar] [CrossRef] [Green Version]
- Lai, Y.-C.; Jan, S.-S.; Hsiao, F.-B. Development of a low-cost attitude and heading reference system using a three-axis rotating platform. Sensors 2010, 10, 2472–2491. [Google Scholar] [CrossRef] [Green Version]
- Michelena, M.D.; Arruego, I.; Oter, J.; Guerrero, H. COTS-based wireless magnetic sensor for small satellites. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 542–557. [Google Scholar] [CrossRef]
- Sanz, R.; Fernández, A.B.; Dominguez, J.A.; Martín, B.; Michelena, M.D. Gamma irradiation of magnetoresistive sensors for planetary exploration. Sensors 2012, 12, 4447–4465. [Google Scholar] [CrossRef]
- Arias, S.I.R.; Muñoz, D.R.; Cardoso, S.; Ferreira, R.; de Freitas, P.J.P. Total ionizing dose (TID) evaluation of magnetic tunnel junction (MTJ) current sensors. Sens. Actuators. A Phys. 2015, 225, 119–127. [Google Scholar] [CrossRef]
- Baibich, M.N.; Broto, J.M.; Fert, A.; Nguyen Van Dau, F.; Petroff, F.; Etienne, P.; Creuzet, G.; Friederich, A.; Chazelas, J. Giant magnetoresistance of (001)Fe/(001)Cr magnetic superlattices. Phys. Rev. Lett. 1988, 61, 2472–2475. [Google Scholar] [CrossRef] [Green Version]
- Binasch, G.; Grünberg, P.; Saurenbach, F.; Zinn, W. Enhanced magnetoresistance in layered magnetic structures with antiferromagnetic interlayer exchange. Phys. Rev. B Condens. Matter 1989, 39, 4828. [Google Scholar] [CrossRef] [Green Version]
- Reig, C.; de Freitas, S.C. Giant Magnetoresistance (GMR) Sensors. In Smart Sensors, Measurement and Instrumentation; Mukhopadhyay, S.C., Ed.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 6, p. 300. [Google Scholar] [CrossRef]
- Kools, J.C.S. Exchange-Biased Spin-Valves for Magnetic Storage. IEEE Trans. Mag. 1996, 32, 3165–3184. [Google Scholar] [CrossRef]
- Stoner, E.C.; Wohlfarth, E.P. A mechanism of magnetic hysteresis in heterogeneous alloys. Phil. Trans. Roy. Soc. 1948, 240, 599–642. [Google Scholar] [CrossRef]
- Szasz, K.; Bakonyi, I. Modeling the magnetoresistance vs. field curves of GMR multilayers with antiferromagnetic and/or orthogonal coupling by assuming single-domain state and coherent rotation. J. Spintron. Magn. Nanomater. 2012, 1, 157–167. [Google Scholar] [CrossRef]
- Reig, C.; Cubells-Beltran, M.D.; Munoz, D.R. Magnetic Field Sensors Based on Giant Magnetoresistance (GMR) Technology: Applications in Electrical Current Sensing. Sensors 2009, 9, 7919–7942. [Google Scholar] [CrossRef]
- Kurenkov, A.S.; Babaytsev, G.V.; Chechenin, N.G. An origin of asymmetry of giant magnetoresistance loops in spin valves. J. Magn. Magn. Mater. 2019, 470, 147–150. [Google Scholar] [CrossRef]
- Bukunov, K.; Babaitsev, G.; Chechenin, N. Modeling of magnetic label field sensing by GMR structure. EPJ Web Conf. 2018, 185, 01001. [Google Scholar] [CrossRef]
- Babaitsev, G.V.; Chechenin, N.G.; Dzhun, I.O.; Kozin, M.G.; Romashkina, I.L. GMR effect in nonhomogeneous magnetic field. J. Phys. Conf. Ser. 2019, 1389, 012145. [Google Scholar] [CrossRef]
- Babaitsev, G.V.; Chechenin, N.G.; Dzhun, I.O.; Romashkina, I.L.; Kozin, M.G.; Makunin, A.V. Spin-valve sensor in the magnetic field of a moving label. Moscow Univ. Phys. Bull 2021. In Press. [Google Scholar]
- Bruckner, F.; Bergmair, B.; Brueckl, H.; Palmesi, P.; Buder, A.; Satz, A.; Suess, D. A device model framework for magnetoresistive sensors based on the Stoner–Wohlfarth model. J. Magn. Magn. Mater. 2015, 381, 344–349. [Google Scholar] [CrossRef] [Green Version]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Babaytsev, G.V.; Chechenin, N.G.; Dzhun, I.O.; Kozin, M.G.; Makunin, A.V.; Romashkina, I.L. Clusters of Spin Valve Sensors in 3D Magnetic Field of a Label. Sensors 2021, 21, 3595. https://doi.org/10.3390/s21113595
Babaytsev GV, Chechenin NG, Dzhun IO, Kozin MG, Makunin AV, Romashkina IL. Clusters of Spin Valve Sensors in 3D Magnetic Field of a Label. Sensors. 2021; 21(11):3595. https://doi.org/10.3390/s21113595
Chicago/Turabian StyleBabaytsev, Georgy V., Nikolay G. Chechenin, Irina O. Dzhun, Mikhail G. Kozin, Alexey V. Makunin, and Irina L. Romashkina. 2021. "Clusters of Spin Valve Sensors in 3D Magnetic Field of a Label" Sensors 21, no. 11: 3595. https://doi.org/10.3390/s21113595
APA StyleBabaytsev, G. V., Chechenin, N. G., Dzhun, I. O., Kozin, M. G., Makunin, A. V., & Romashkina, I. L. (2021). Clusters of Spin Valve Sensors in 3D Magnetic Field of a Label. Sensors, 21(11), 3595. https://doi.org/10.3390/s21113595