
Lack of Thermogram Sharpness as Component of Thermographic Temperature Measurement Uncertainty Budget


Abstract
:1. Introduction
2. Materials and Methods
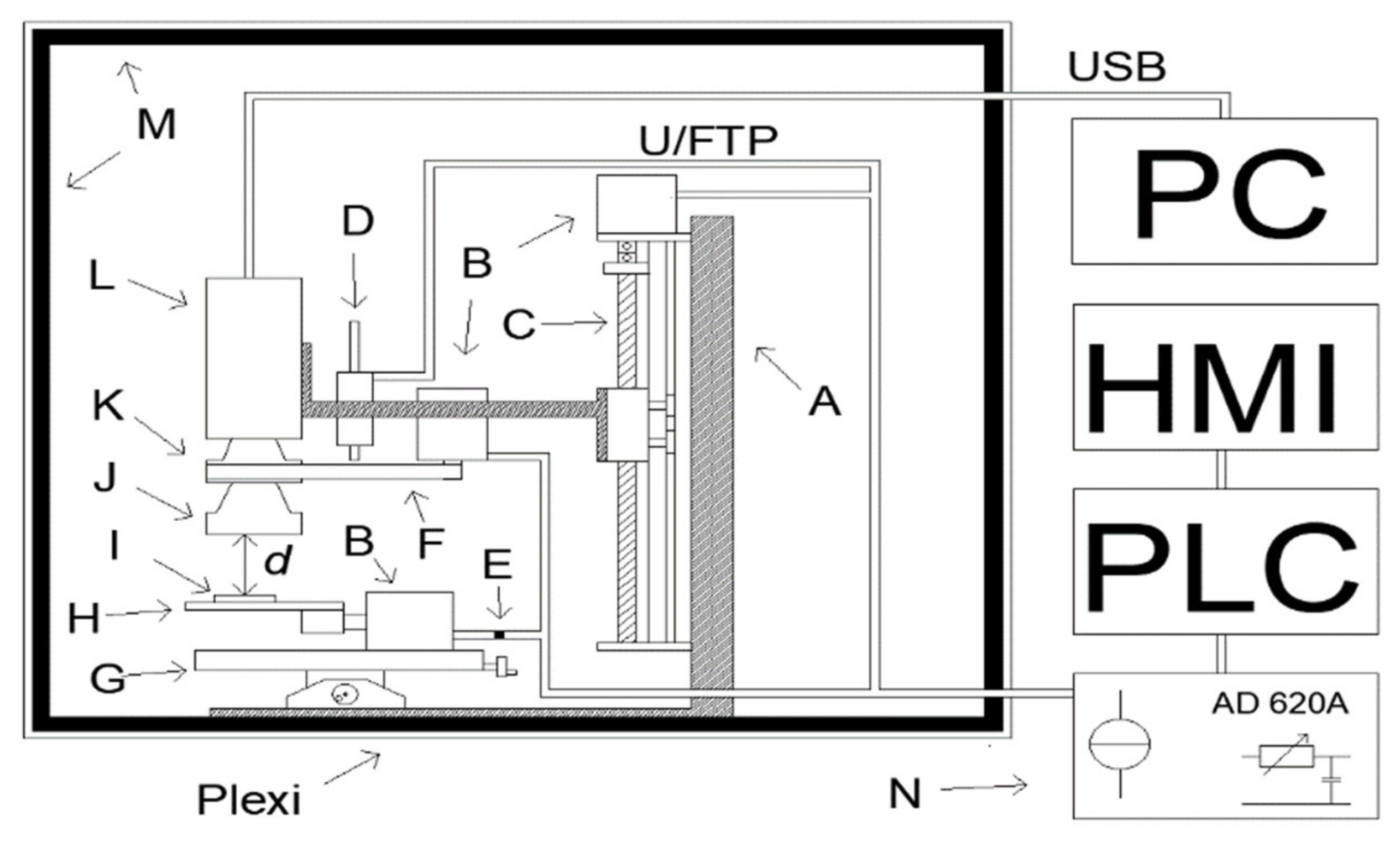
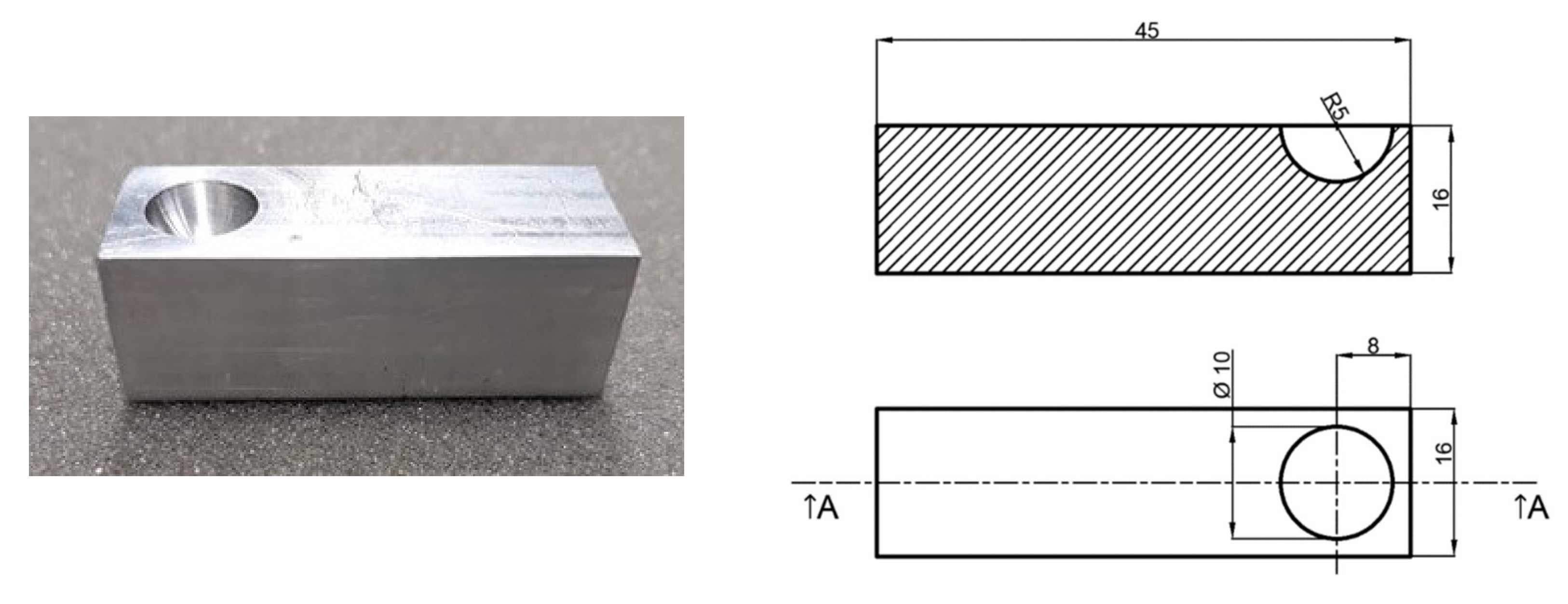
2.1. The Measurement System
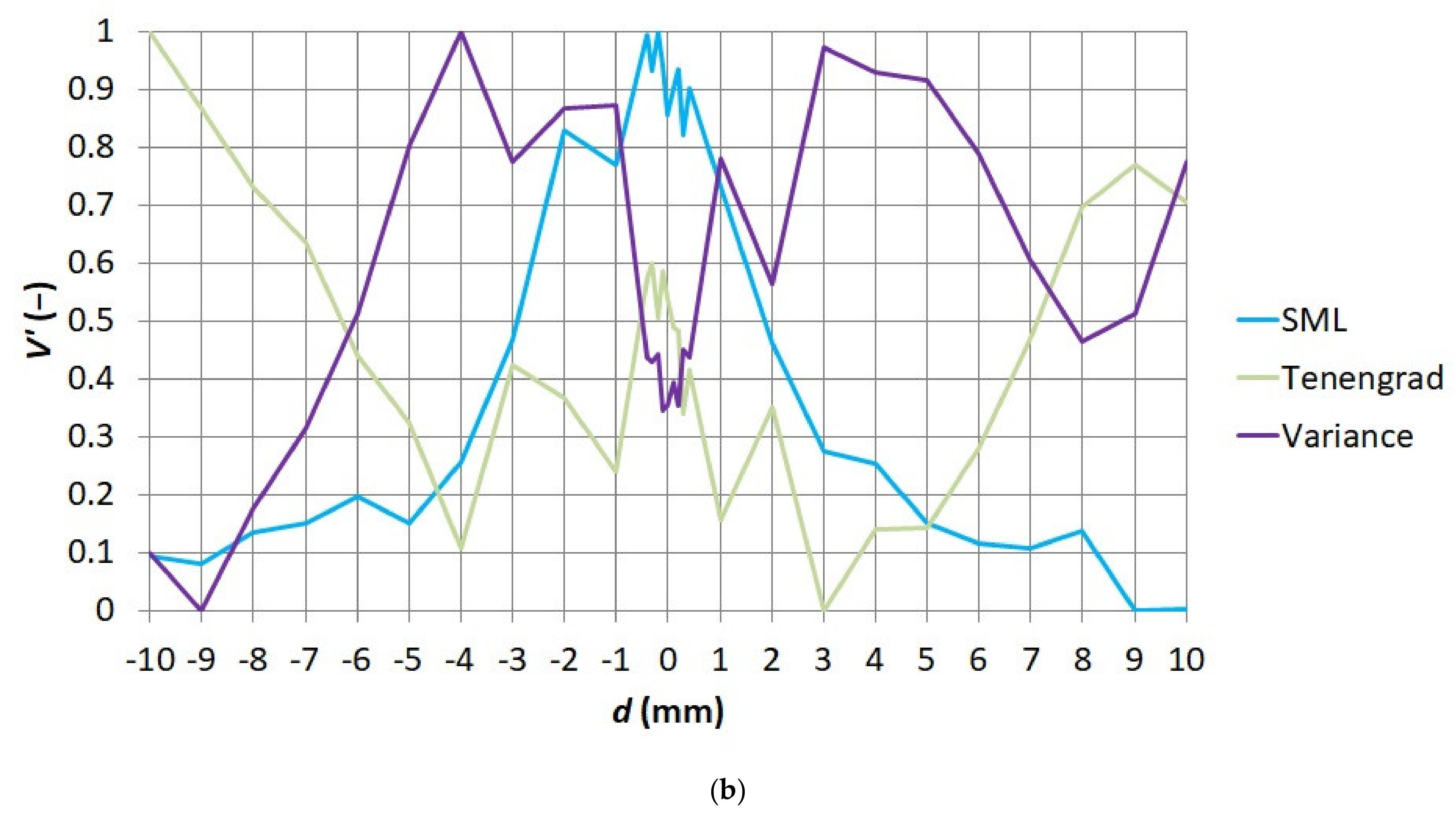
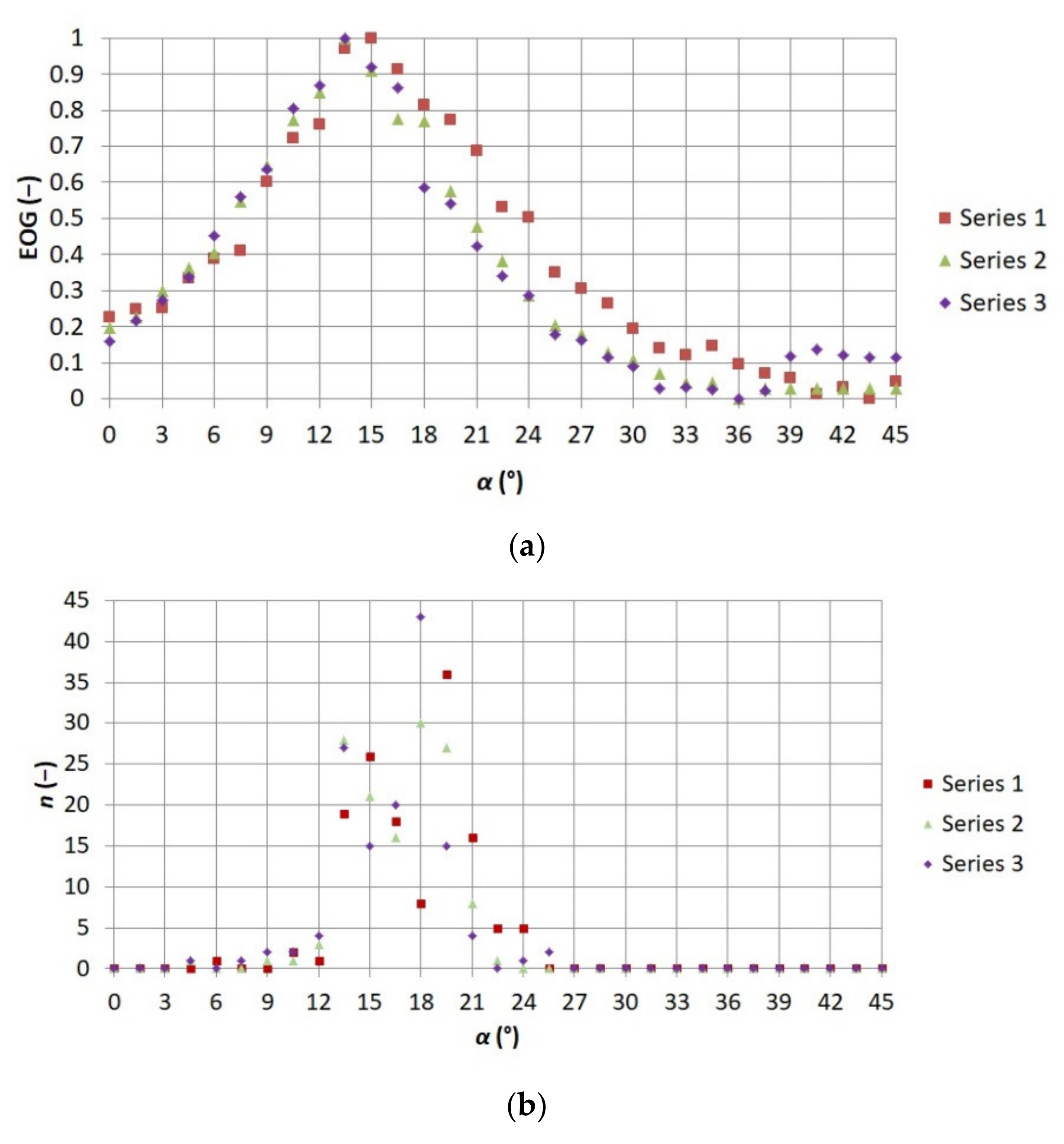
2.2. Measures of Sharpness
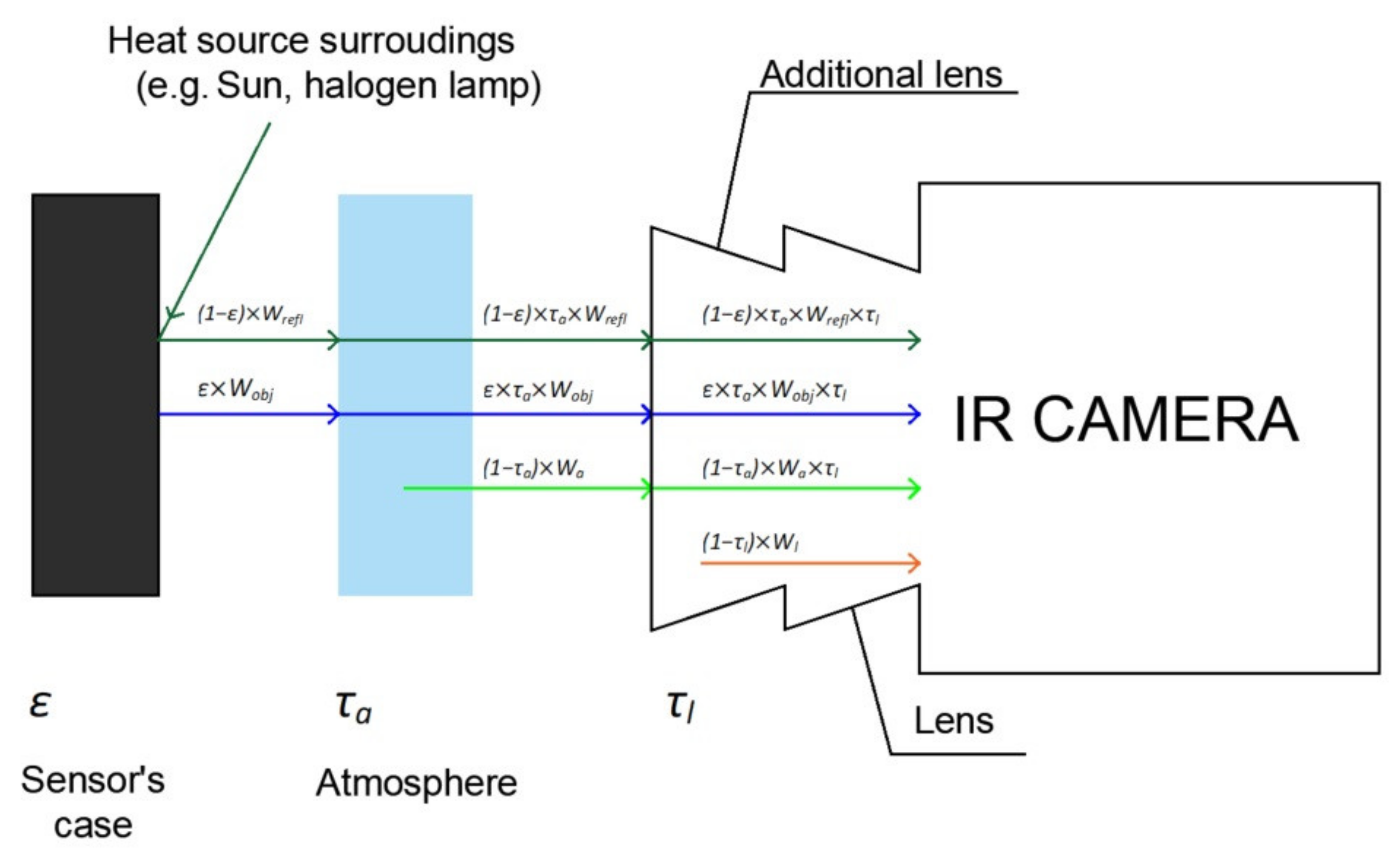
2.3. Methodology of Estimating Uncertainty by Type B Method
3. Experimental Results
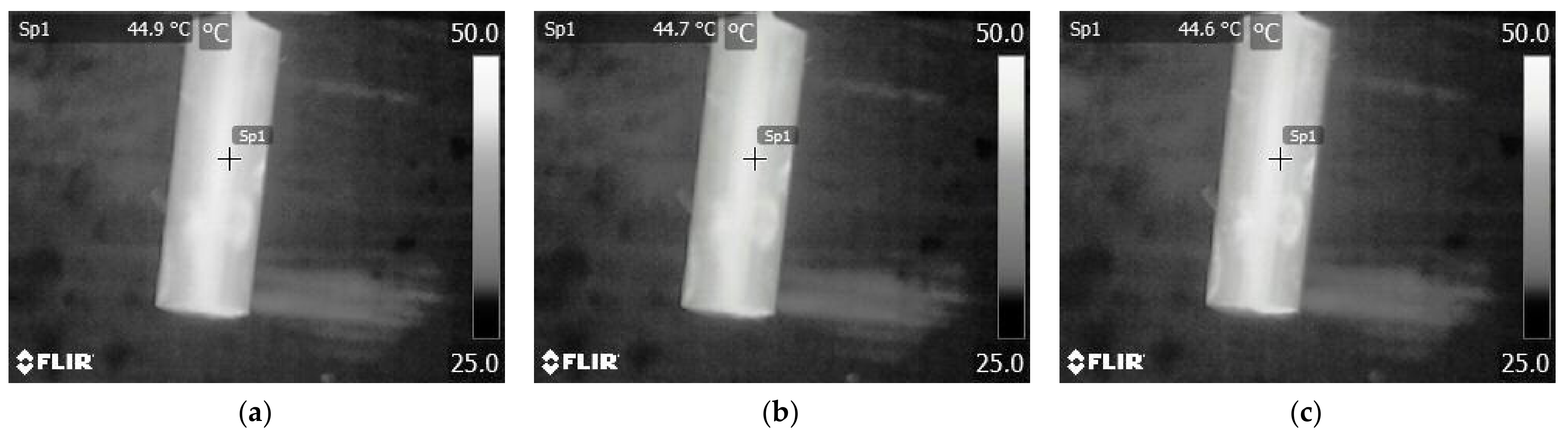
3.1. Comparison of Sharpness Measurement Results and Observer Indications
3.2. The Uncertainty Budget
3.3. Uncertainty Budget with Thermogram Sharpness
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Minkina, W.; Klecha, D. Modeling of Athmospheric Transmission Coefficient in Infrared for Thermography Measurements. In Proceedings of the Sensor 2015 and IRS2 2015 AMA Conferences, Nürnberg, Germany, 19–21 May 2015. [Google Scholar] [CrossRef]
- Minkina, W.; Dudzik, S. Infrared Thermography Errors and Uncertainties; John Wiley & Sons, Ltd.: Chichester, UK, 2009; pp. 1–29. [Google Scholar]
- Fabien, G. On the meaning of measurement uncertainty. Measurement 2019, 133, 41–46. [Google Scholar] [CrossRef]
- Zaccara, Z.; Edelman, J.B.; Cardone, G. A general procedure for infrared thermography heat transfer measurements in hypersonic wind tunnels. Int. J. Heat Mass Transf. 2020, 163, 120419–120435. [Google Scholar] [CrossRef]
- Altenburg, J.S.; Straße, A.; Gumenyuk, A.; Meierhofer, C. In-situ monitoring of a laser metal deposition (LMD) process: Comparison of MWIR, SWIR and high-speed NIR thermography. Quant. InfraRed Thermogr. J. 2020, 1–18. [Google Scholar] [CrossRef]
- Yoon, S.T.; Park, J.C. An experimental study on the evaluation of temperature uniformity on the surface of a blackbody using infrared cameras. Quant. InfraRed Thermogr. J. 2021, 1–15. [Google Scholar] [CrossRef]
- Schuss, C.; Remes, K.; Leppänen, K.; Saarela, J.; Fabritius, T.; Eichberger, B.; Rahkonen, T. Detecting Defects in Photovoltaic Cells and Panels with the Help of Time-Resolved Thermography under Outdoor Environmental Conditions. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Chakraborty, B.; Billol, K.S. Process-integrated steel ladle monitoring, based on infrared imagin—A robust approach to avoid ladle breakout. Quant. InfraRed Thermogr. J. 2020, 169–191. [Google Scholar] [CrossRef]
- Tomoyuki, T. Coaxiality Evaluation of Coaxial Imaging System with Concentric Silicon–Glass Hybrid Lens for Thermal and Color Imaging. Sensors 2020, 20, 5753. [Google Scholar] [CrossRef]
- Wollack, J.E.; Cataldo, G.; Miller, K.H.; Quijada, A.M. Infrared properties of high-purity silicon. Opt. Lett. 2020, 45, 4935–4938. [Google Scholar] [CrossRef]
- Singh, J.; Arora, A.S. Effectiveness of active dynamic and passive thermography in the detection of maxillary sinusitis. Quant. InfraRed Thermogr. J. 2020, 1–13. [Google Scholar] [CrossRef]
- Chang, K.S.; Yang, S.C.; Kim, J.Y.; Kook, M.H.; Ryu, S.Y.; Choi, H.Y.; Kim, G.H. Precise Temperature Mapping of GaN-Based LEDs by Quantitative Infrared Micro-Thermography. Sensors 2012, 12, 4648–4660. [Google Scholar] [CrossRef]
- Rubén, U.; Venegas, P.; Guerediaga, J.; Vega, L.; Molleda, J.; Bulnes, F.G. Infrared Thermography for Temperature Measurement and Non-Destructive Testing. Sensors 2014, 14, 12305–12348. [Google Scholar] [CrossRef] [Green Version]
- Litwa, M. Influence of angle of View on Temperature Measurement Using Thermovision Camera. IEEE Sens. J. 2010, 10, 1552–1554. [Google Scholar] [CrossRef]
- User’s Manual Flir Tools/Tools+. Available online: http://91.143.108.245/Downloads/Flir/Dokumentation/t810209-en-us_a4.pdf/ (accessed on 28 May 2021).
- Dziarski, K.; Hulewicz, A.; Dombek, G.; Frąckowiak, R.; Wiczyński, G. Unsharpness of Thermograms in Thermography Diagnostics of Electronic Elements. Electronics 2020, 9, 897. [Google Scholar] [CrossRef]
- Dziarski, K.; Hulewicz, A. Effect of unsharpness on the result of thermovision diagnostics of electronic components. In Proceedings of the 15th Quantitative InfraRed Thermography Conference, Porto, Portugal, 6–10 July 2020. [Google Scholar] [CrossRef]
- Hung, P.Y.; Chen, K.Y.; Hsu, H.W.; Wang, R.H. Integration of Autofocus and Object Tracking in an Infrared Stereo Vision-Based Video Surveillance System with Multi-Lens Module. In Proceedings of the IEEE International Conference on Applied System Innovation, Taiwan, China, 13–17 April 2018. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, L.; Gong, W.; Yu, H.; Wang, W.; Zhao, C.; Wang, P.; Ueda, T. Autofocus System and Evaluation Methodologies: A Literature Review. Sens. Mater. 2018, 30, 1165. [Google Scholar] [CrossRef]
- Zhuo, G.-Y.; Su, H.-C.; Wang, H.-Y.; Chan, M.-C. In situ high-resolution thermal microscopy on integrated circuits. Opt. Express 2017, 25, 21548. [Google Scholar] [CrossRef]
- Bae, J.Y.; Lee, K.-S.; Hur, H.; Nam, K.-H.; Hong, S.-J.; Lee, A.-Y.; Chang, K.S.; Kim, G.-H.; Kim, G. 3D Defect Localization on Exothermic Faults within Multi-Layered Structures Using Lock-In Thermography: An Experimental and Numerical Approach. Sensors 2017, 17, 2331. [Google Scholar] [CrossRef] [Green Version]
- Brand, S.; Altman, F. Lock-In-Thermography, Photoemission, and Time-Resolved GHz Acoustic MicroscopyTechniques for NondestructiveDefect Localization in TSV. IEEE Trans. Compon. Packag. Manuf. Technol. 2018, 8, 735. [Google Scholar] [CrossRef]
- Ferreira, R.A.M.; Silva, B.P.A.; Teixeira, G.G.D.; Andrade, R.M.; Porto, M.P. Uncertainty analysis applied to electrical components diagnosis by infrared thermography. Measurement 2019, 132, 263. [Google Scholar] [CrossRef]
- Dudzik, S.; Minkina, W. examples of uncertainty calculations in thermographic measurement. Przegląd Elektrotechniczny 2018, 94, 124. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez-Gonzálvez, P.; Rodríguez-Martín, M. Understanding Uncertainties in Thermographic Imaging. In Proceedings of the Seventh International Conference on Technological Ecosystems for Enhancing Multiculturality (TEEM’19), New York, NY, USA, 16–18 October 2019. [Google Scholar] [CrossRef]
- König, S.; Gutschwager, B.; Taubert, R.D.; Hollandt, J. Metrological characterization and calibration of thermographic cameras for quantitative temperature measurement. J. Sens. Sens. Syst. 2020, 9, 425. [Google Scholar] [CrossRef]
- Park, C.W.; Yoo, Y.S.; Kim, B.H.; Chun, S.; Park, S.N. Construction and Characterization of a Large ApertureBlackbody for Infrared Radiometer Calibration. Int. J. Thermophys. 2011, 32, 1622. [Google Scholar] [CrossRef]
- Flir E-Series. Available online: https://www.globaltestsupply.com/pdfs/cache/www.globaltestsupply.com/flir_systems/thermal_imager/e50/datasheet/flir_systems_e50_thermal_imager_datasheet.pdf (accessed on 30 March 2021).
- Close-Up 2x Lens. Available online: https://www.flircameras.com/t197214-close-up-2x-lens.htm (accessed on 30 March 2021).
- Data Sheet for Linear Sensors. Available online: http://www.czujniki.org/download/ds_mm_dt.pdf (accessed on 3 April 2021).
- Krawiec, P.; Rózański, L.; Czarnecka-Komorowska, D.; Warguła, Ł. Evaluation of the Thermal Stability and Surface Characteristics of Thermoplastic Polyurethane V-Belt. Materials 2020, 7, 1502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Specification of Pt Thermal Sensor. Available online: https://www.tme.eu/Document/120d55a752e43ed7c5252cdb645d394a/PT106053.pdf (accessed on 30 March 2021).
- Huang, W.; Jing, Z. Evaluation of focus measures in multi-focus image Fusion. Pattern Recognit. Lett. 2007, 28, 493–500. [Google Scholar] [CrossRef]
- Saad, M.; Bovik, A.; Charrier, C. Blind image quality assessment: A natural scene statistics approach in the DCT domain. IEEE Trans. Image Process. 2012, 21, 3339–3352. [Google Scholar] [CrossRef] [PubMed]
- Faundez-Zanuy, M.; Mekyska, J.; Espinosa-Duró, V. On the focusing of thermal images. Pattern Recognit. Lett. 2011, 32, 1548–1557. [Google Scholar] [CrossRef]
- Soldan, S. On extended depth of field to improve the quality of automated thermographic measurements in unknown environments. Quant. InfraRed Thermogr. J. 2012, 9, 135–150. [Google Scholar] [CrossRef]
- Hassen, R.; Wang, Z.; Salama, M. Image sharpness assessment based on local phase coherence. IEEE Trans. Image Process. 2013, 22, 2798–2810. [Google Scholar] [CrossRef] [PubMed]
- Moorthy, A.K.; Bovik, A.C. Blind image quality assessment: From natural scene statistics to perceptual quality. IEEE Trans. Image Process. 2011, 20, 3350–3364. [Google Scholar] [CrossRef]
- Saad, M.; Bovik, A.; Charrier, C. DCT statistics model-based blind image quality assessment. In Proceedings of the IEEE International Conference on Image Processing, Brussels, Belgium, 11–14 September 2011; pp. 3093–3096. [Google Scholar] [CrossRef] [Green Version]
- Otomański, P.; Kuwałek, P. Applications of Fourier series to determine the measurements error of harmonics with selected power quality analysers. In Proceedings of the 11th International Conference on Measurement (MEASUREMENT 2017), Smolenice, Slovakia, 29–31 May 2017. [Google Scholar] [CrossRef]
- Tran, Q.H.; Han, D.; Kang, C.; Haldar, A.; Huh, J. Effects of Ambient Temperature and Relative Humidity on Subsurface Defect Detection in Concrete Structures by Active Thermal Imaging. Sensors 2017, 17, 1718. [Google Scholar] [CrossRef]
- European Co-Operation for Accreditation. Available online: http://www.european-accreditation.org/ (accessed on 15 April 2021).
- Morello, R. GUM-Based Decisional Criteria to Make Decisions in Presence of Measurement Uncertainty. IEEE Trans. Instr. Meas. 2020, 69, 5511–5522. [Google Scholar] [CrossRef]
- Papadakos, G.; Marinakis, V.; Konstas, C.; Doukas, H.; Papadopoulos, A. Managing the uncertainty of the U-value measurement using an auxiliary set along with a thermal camera. Energy Build. 2021, 242, 110984. [Google Scholar] [CrossRef]
- Ohlsson, K.E.A.; Olofsson, T. Quantitative infrared thermography imaging of the density of heat flow rate through a building element surface. Appl. Energy 2014, 134, 499. [Google Scholar] [CrossRef]
- Kuwałek, P.; Otomański, P.; Wandachowicz, K. Influence of the Phenomenon of Spectrum Leakage on the Evaluation Process of Metrological Properties of Power Quality Analyser. Energies 2020, 13, 5338. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol Xi | Unit | Estimate of Quantity xi | Standard Uncertainty u(xi) | Distribution of Probability | Sensitivity Coefficient ci | Contribution of Uncertainty ui(y) |
|---|---|---|---|---|---|---|
| ϑa | °C | 26.50 | 4.90 | rectangular | 0.62 | 3.04 |
| ω% | % | 44.50 | 17.32 | rectangular | 0.25 | 4.33 |
| ω | - | 13.93 | 5.29 |
| Symbol Xi | Unit | Estimate of Quantity xi | Standard Uncertainty u(xi) | Distribution of Probability | Sensitivity Coefficient ci | Contribution of Uncertainty ui(y) |
|---|---|---|---|---|---|---|
| ω | - | 13.93 | 5.29 | normal | −3.78 × 10−5 | −0.003 |
| d | m | 0.033 | 0.0057 | rectangular | −0.0204 | −0.0007 |
| τa | - | 0.9987 | 0.0010 |
| Symbol Xi | Unit | Estimate of Quantity xi | Standard Uncertainty u(xi) | Distribution of Probability | Sensitivity Coefficient ci | Contribution of Uncertainty ui(y) |
|---|---|---|---|---|---|---|
| τa | - | 0.9987 | 0.0010 | normal | 0.4488 | 0.0004 |
| Wtot | W/m2 | 0.1554 | 0.0066 | rectangular | 67.7701 | 0.4472 |
| ε | - | 0.97 | 0.0086 | rectangular | −7.6450 | −0.0657 |
| ϑrefl | °C | 30 | 2.8868 | rectangular | 0.0119 | 0.0344 |
| τl | m | 0.95 | 0.0289 | rectangular | −10.3189 | 0.2982 |
| ϑa | °C | 26.5 | 4.9000 | rectangular | −0.0151 | −0.0740 |
| ϑl | °C | 26.5 | 4.9000 | rectangular | −0.0151 | −0.0740 |
| ϑobj | °C | 41.3574 | 0.5525 |
| Symbol Xi | Unit | Estimate of Quantity xi | Standard Uncertainty u(xi) | Distribution of Probability | Sensitivity Coefficient ci | Contribution of Uncertainty ui(y) |
|---|---|---|---|---|---|---|
| τa | - | 0.9987 | 0.0010 | normal | 0.4488 | 0.0004 |
| Wtot | W/m2 | 0.1554 | 0.0066 | rectangular | 67.7701 | 0.4472 |
| ε | - | 0.97 | 0.0086 | rectangular | −7.6450 | −0.0657 |
| ϑrefl | °C | 30 | 2.8868 | rectangular | 0.0119 | 0.0344 |
| τl | m | 0.95 | 0.0289 | rectangular | −10.3189 | 0.2982 |
| ϑa | °C | 26.5 | 4.9000 | rectangular | −0.0151 | −0.0740 |
| ϑl | °C | 26.5 | 4.9000 | rectangular | −0.0151 | −0.0740 |
| ϑus | °C | 3.25 | 1.88 | normal | 1 | 1.63 |
| ϑobj | °C | 41.3574 | 3.25 |
| Method Used to Change the Lack of Sharpness | Series | U(ϑus) |
|---|---|---|
| by the change of d | 1 | 1.95 |
| by the change of d | 2 | 5.02 |
| by the change of d | 3 | 5.37 |
| by the change of α | 4 | 5.21 |
| by the change of α | 5 | 6.00 |
| by the change of α | 6 | 6.59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dziarski, K.; Hulewicz, A.; Dombek, G. Lack of Thermogram Sharpness as Component of Thermographic Temperature Measurement Uncertainty Budget. Sensors 2021, 21, 4013. https://doi.org/10.3390/s21124013
Dziarski K, Hulewicz A, Dombek G. Lack of Thermogram Sharpness as Component of Thermographic Temperature Measurement Uncertainty Budget. Sensors. 2021; 21(12):4013. https://doi.org/10.3390/s21124013
Chicago/Turabian StyleDziarski, Krzysztof, Arkadiusz Hulewicz, and Grzegorz Dombek. 2021. "Lack of Thermogram Sharpness as Component of Thermographic Temperature Measurement Uncertainty Budget" Sensors 21, no. 12: 4013. https://doi.org/10.3390/s21124013
APA StyleDziarski, K., Hulewicz, A., & Dombek, G. (2021). Lack of Thermogram Sharpness as Component of Thermographic Temperature Measurement Uncertainty Budget. Sensors, 21(12), 4013. https://doi.org/10.3390/s21124013