Several experiments were carried out to analyze the behavior of the implemented WSN using the standard IEEE 802.15.4 with unslotted mode. With the experimental data acquired in a non-jamming scenario and a jamming scenario, we correlate the theoretical model with the experimental data to analyze the impacts of the attacks. Additionally, we characterize and correlate the smart indoor environment channel with the models in the literature. Consequently, the cyberattacks that aim at the physical layer of the WSN are analyzed experimentally and theoretically to improve the existing models.
4.1. Channel Characterization
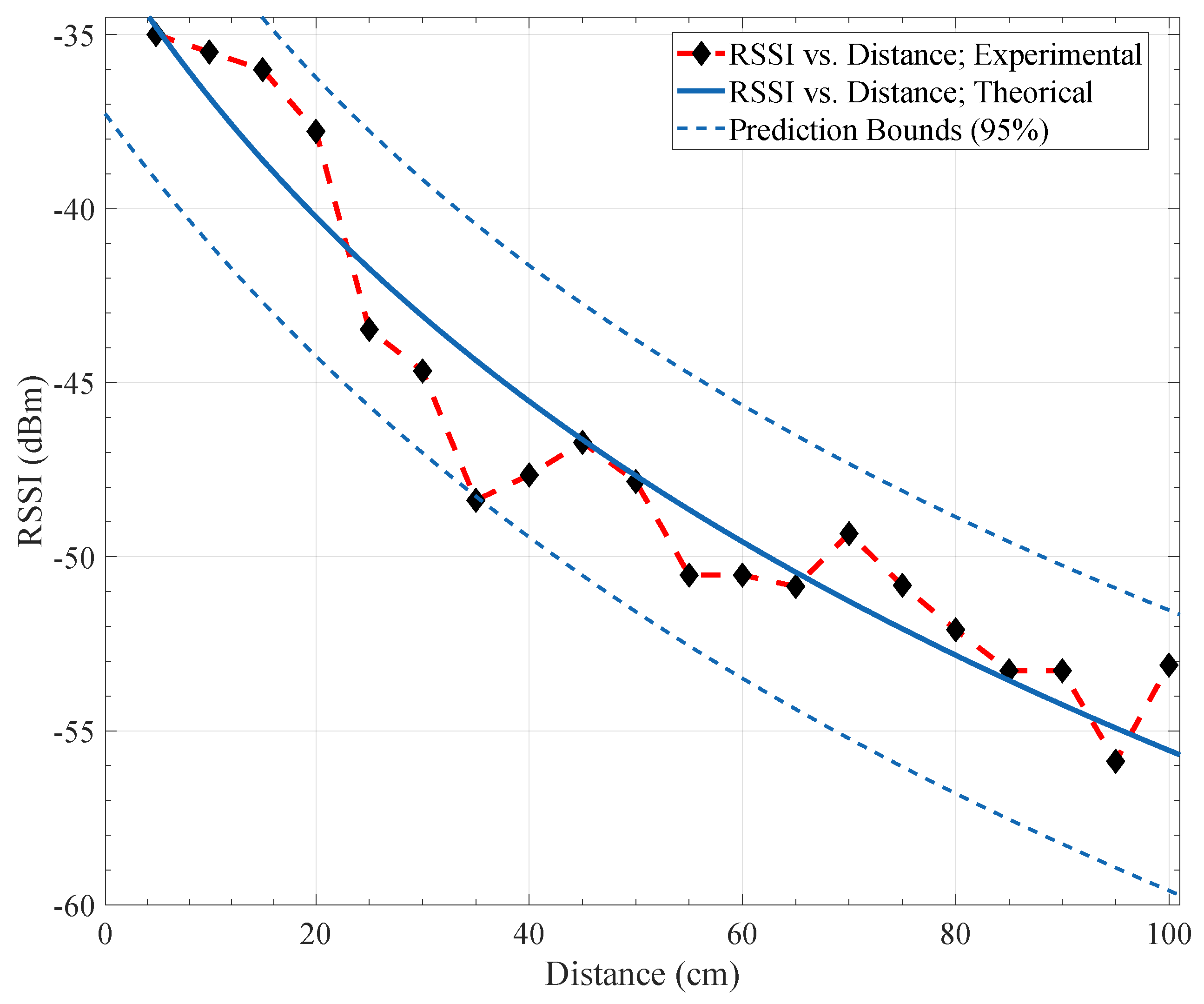
The environment used for the experiment is a typical bedroom with the coexistence of different communication protocols. Therefore, we use the log-normal shadowing path loss model to correlate this analytical model with the experimental data acquired from the RSS values. However, we also analyze the use of Nakagami and Rayleigh models, but we conclude from experimental studies that the chosen model is more accurate for our implemented scenario, which is given as follows:
In our scenario, we obtain that path loss exponent (n) is equal to
and
dB for a reference distance
= 1 m and the variable
is a Gaussian-distributed random variable with zero mean and standard deviation
that represents the shadowing. These results are consistent with the values presented in the works [
36,
37,
38] for the indoor office environment with LOS component.
In
Figure 5 we plot the theoretical and experimental path loss characterization curves for the obtained values of our scenario, as well as prediction bounds of
. Using the spectrum analyzer and the transmission of data with one transmitter, we analyzed the RSS values and behavior of the communications on several days and time hours. The results show that the optimal range of hours to perform the experiments is between 8 a.m. and 4 p.m. in the week. In the weekend or outside of this range of hours, the environment has a lot of interference signals, and erratic behavior of the RSS values reported. We also found that channel 12 (
= 2410 MHz) is the best for communication through the experiments.
The erratic behavior of the RSS values in the used channel for the experiment was also analyzed. As previously stated, the range of hours between 8 a.m. and 4 p.m. in the week is the ideal case that matches with the labor hours. Therefore, the communications protocols using the GHz ISM band, such as IEEE , will be unused owing to the absence of users in their homes. Consequently, this inactivity allows us to perform experiments with little activity on the frequency band. Additionally, it shows us how the coexistence varies the values of the analyzed metrics.
4.2. Packet Data Rate and Goodput
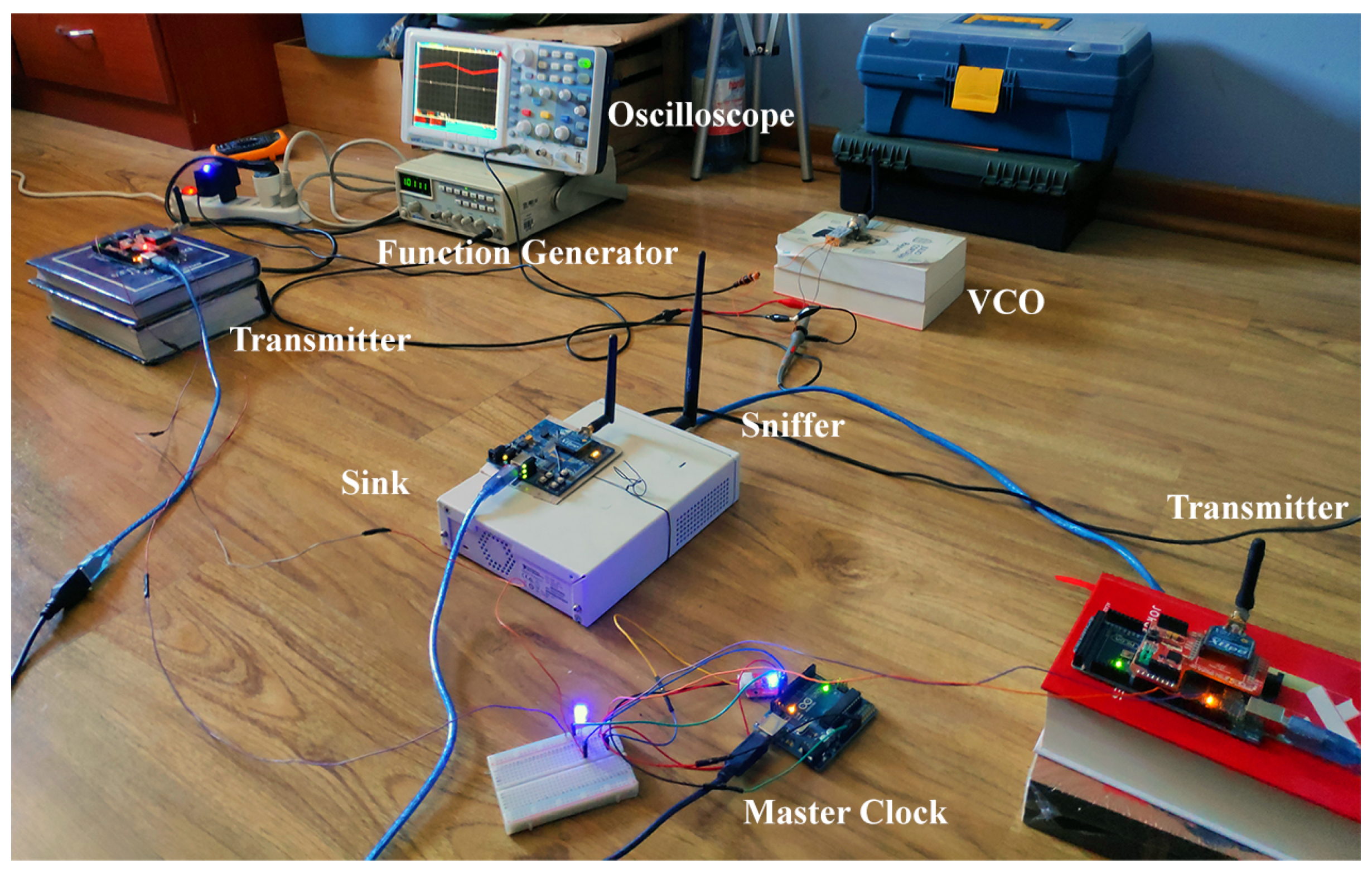
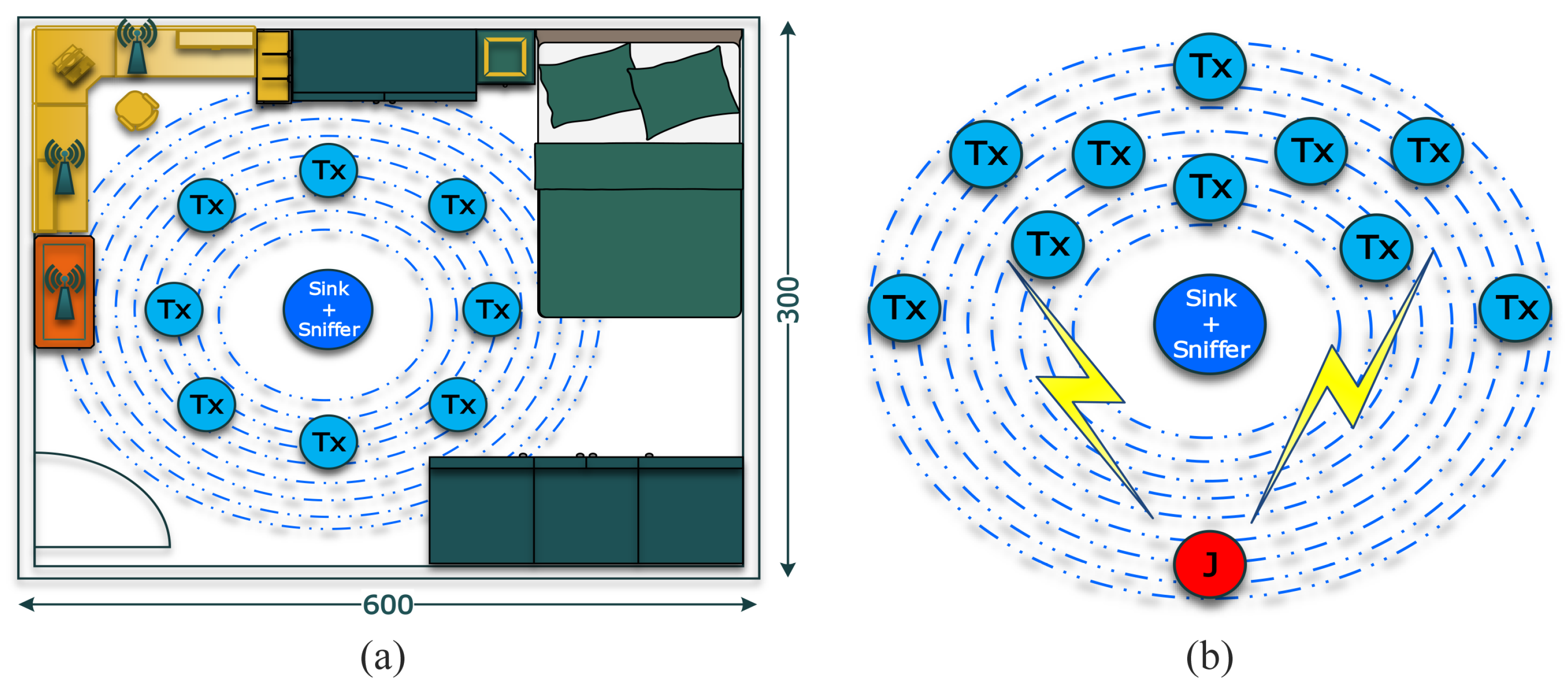
Later, we carried out experiments to analyze the performance of the network composed of the XBee devices under the different jamming strategies. The main difference between the experiments resides in the variation of the BE parameter for the transmitter node to transform into an interferer node. With this modification and the assumptions for our work, this node behaves like a reactive jamming strategy. When the reactive strategy is used, the scenario implemented has a circular distribution of the transmitters nodes to the sink node. Specifically, with the sink node, we deploy the sniffer device in the center of the circle as show in
Figure 6a. We also use the same distribution for the constant strategy. However, the distance of the constant jammer device is fixed to one position due to the power output and the impossibility to vary between experiments as displayed in
Figure 6b.
The distances between the nodes used in the experiments and the number of nodes suffered from limitations due to the physical space owing to the outbreak of the coronavirus, COVID-19. However, the distances and number of nodes used in this work are in the range of values used in previous works for smart indoor environments [
14,
17,
18,
23]). Note that, when the transmitter is used as an interferer, the circular distribution is maintained.
To determine the performance metrics for the scenarios under jamming attacks, we activate the ACK mechanism. Therefore, we have the information of the transmitters, the received packets in the sink, and the registered packets by the sniffer to analyze the behavior. For the first round of experiments, we vary the number of interferers present in the scenario to analyze the performance against one transmitter. Consequently, we start the experiments with one transmitter and one interferer. We remark that the sniffer and the sink node are always implemented in all the experiments.
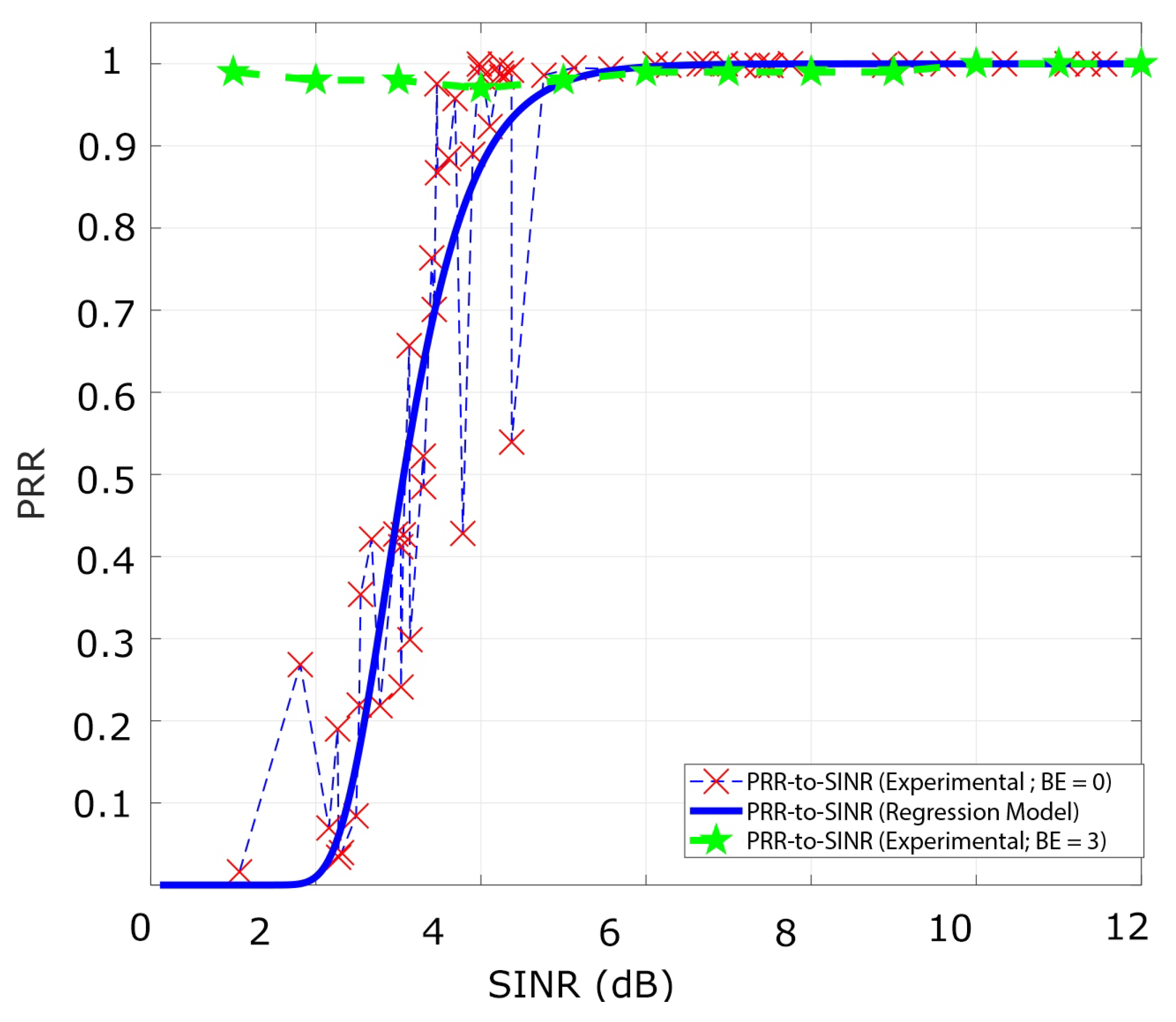
Using a reactive strategy with one interferer in the scenario, we analyze the PRR from different SINR values. Therefore, we configure a for the transmitter and the interferer nodes to generate collisions. The results showed that for values of SINR greater than dB, the PRR is almost . We also corroborate this information by the ACK status reported from the transmitters, which show almost null errors in the transmission.
However, for values of SINR between 0 and
dB, the legitimate signals overlap with the interference signal that produces different values of PRR, as shown in
Figure 7, the PRR-to-SINR values have particular regions of analysis. Additionally, from the curve is deducted that the CE occurs for multiple values of SINR considering one interferer.
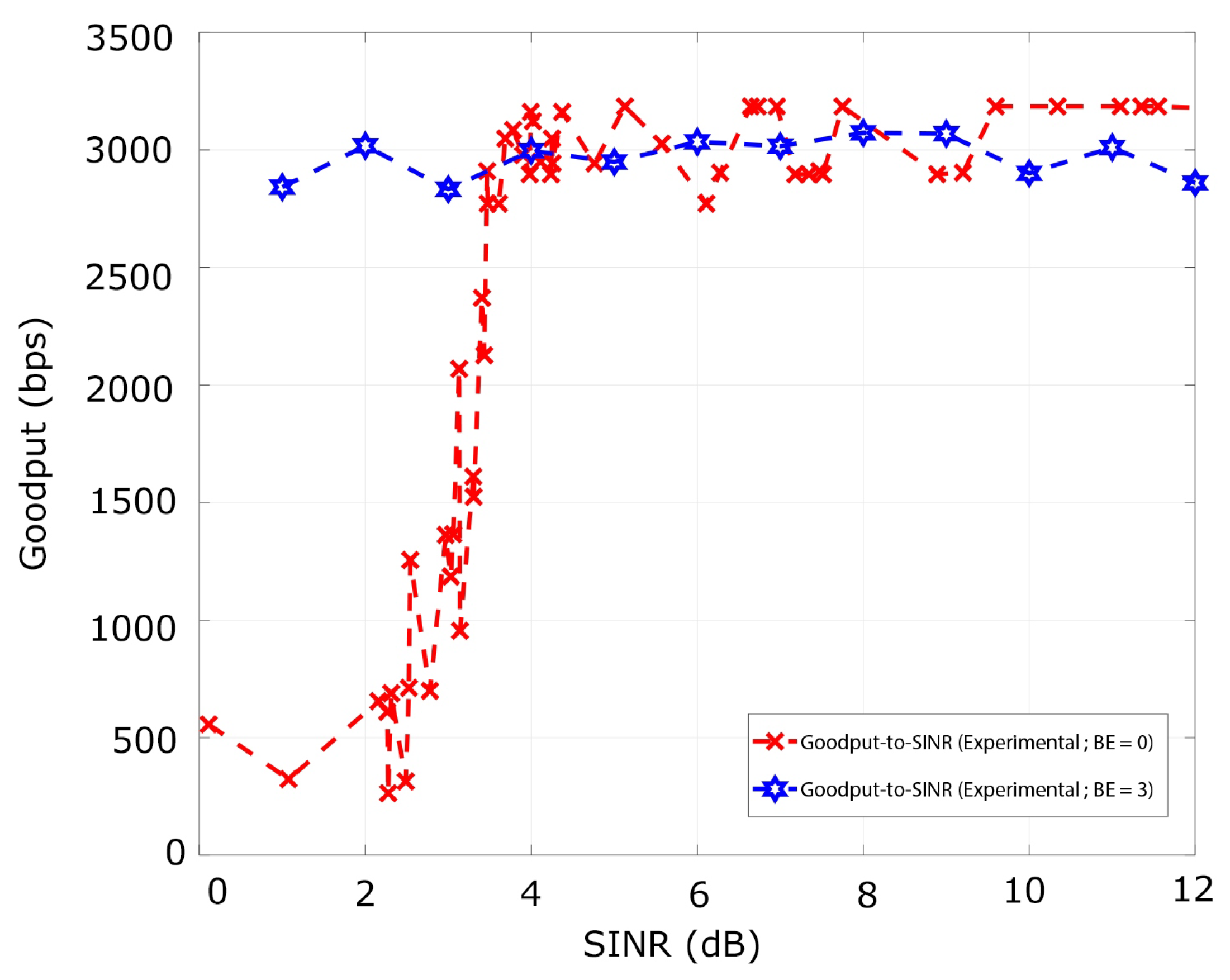
Then we analyze the goodput metric for the same range SINR values with
. The goodput behaves similarly to the curve of PRR in the different regions produced by the SINR range. Specifically, for values of SINR greater than 4.5 dB, both curves converge to a value that for the case of the goodput is
bps. Furthermore, for the SINR interval comprehended from [1.07, 4.5] dB, the goodput varies from
bps to
bps. These results are acquired for
,
, and
and plotted in
Figure 8.
Next, using one transmitter, interfering, and the sink node, we analyze the metrics for
. The variation of the window length of the backoff mechanism eliminates the overlap of the signals. Therefore, the curve of PRR-to-SINR is equal to
for the entire range of values analyzed in the several experiments as presented in
Figure 7. Similarly, the goodput converges to a value of 2900 bps for the range between
to 9 dB. However, for an SINR value equal to
dB exists a slight decrease of the goodput of 2650 bps owing to the stochastic behavior of the channel across the experiments, as shown in
Figure 8.
In summary, for values of SINR higher than dB, PRR-to-SINR and goodput-to-SINR curves converge to for and with for the reactive strategy.
Then, we increment the number of interferer nodes
to analyze the performance of the transmitter
. Following the circular distribution, we deploy the nodes at different distances from the sink node. From here, we only analyze the performance metrics for a total collision scenario, and all the nodes are configured with
. The results show that the interferers generate a constructive interference that completely blocks the reception of packets, as shown in
Table 2. Therefore, we focus on finding a threshold value that permits the reception of packets with two interferers.
To encounter the threshold that permits the reception of packets in the sink node for the transmitter node, we use the following methodology. First, we fixed the distance of the transmitter to the sink node. Then, we vary the relative distance of the interferers from the sink and also between them. According to the results acquired, when the second interferer have a threshold of almost
dBm from the first interferer, the reception of the packets occurs,
Table 3 shows some experiments performed that reveals this behavior. Additionally, we remark that the threshold between the interferers and the transmitter follows the assumptions analyzed in the scenario with a
.
The reported values of PRR corresponds to the average value of the total devices. The experiments show that for a certain RSS threshold between the interferers, the reception occurs. We also found that a similar threshold between the transmitter and the interferer with the higher RSS value is needed.
Next, we change the interferer node of the reactive strategy to the constant strategy. For this, we deploy the VCO in a fixed position of 60 cm from the sink node. Using the SDR as a spectrum analyzer and correlating the gain of SDR with the XBee devices, we fixed the signal strength in −58 dBm for the jammer. Then, we modify the distance of the XBee transmitter to achieve different SINR values, as shown in
Figure 6. The results show that despite the strategy used, the PDR and goodput metrics vary equally. Therefore, the SINR value is critical to ensure the PDR and goodput for the application scenario used in our work.
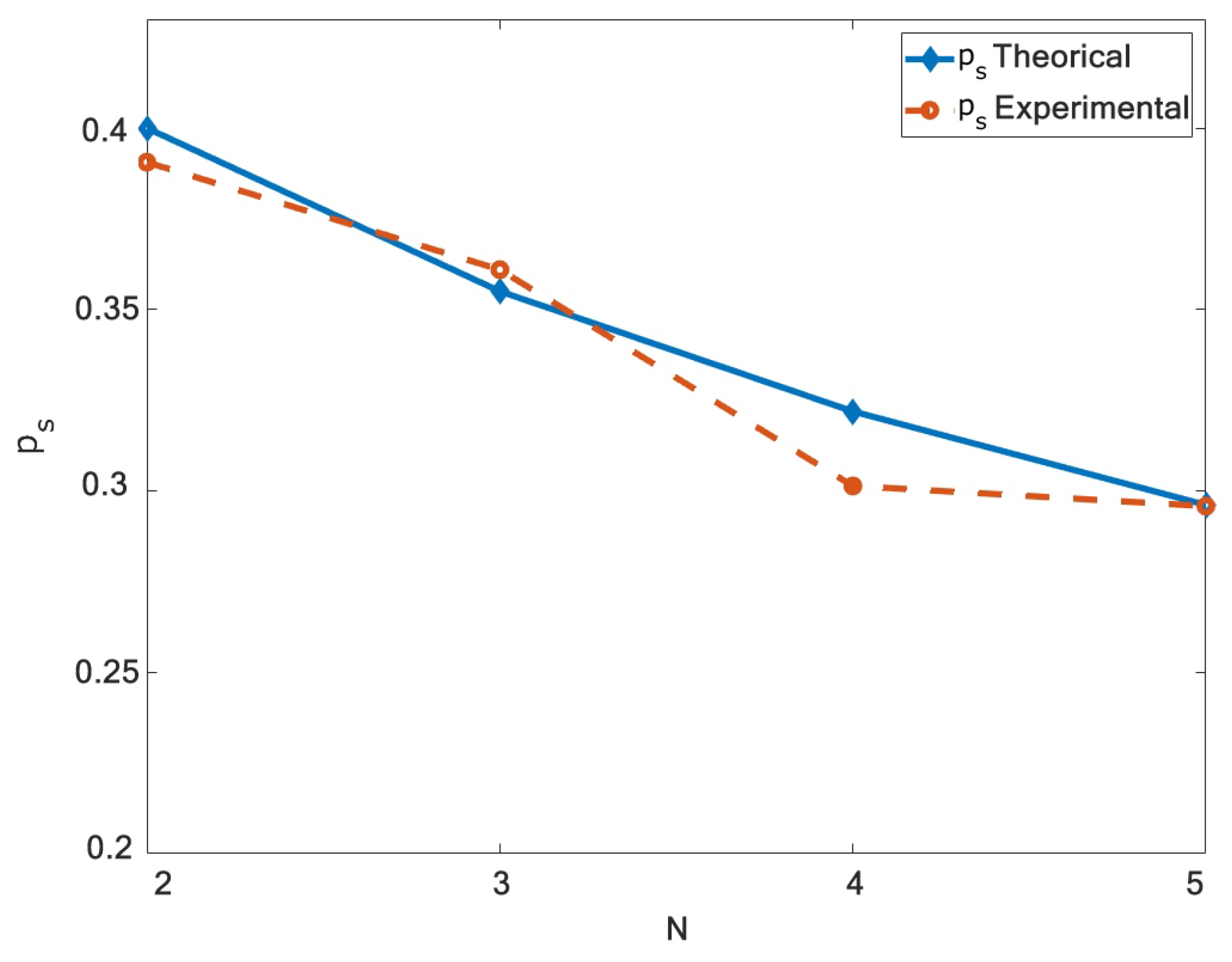
Finally, we correlate the experimental results of the PDR with the analytical model for the
performance metric. Using a fixed value of
and
, we plot the experimental and theoretical curve of
. For this, we use the protection ratio
as used in the work [
23] to compare the curves. The experimental curve shows a good agreement with the proposed model under the assumptions used in our work, as shown in
Figure 9.
Overall, these results indicate that the impact of both attackers’ strategies is the same for the range of SINR analyzed for the PRR and goodput metrics. Moreover, the acquired experimental data presents a good correlation with the proposed extended model that includes the presence of jamming attacks. Therefore, the WSNs deployed in smart environments under the assumptions of this work could use the PRR and goodput metrics of the extended model to predict the performance of the network under jamming attacks.
4.3. RSS and Transmission Status
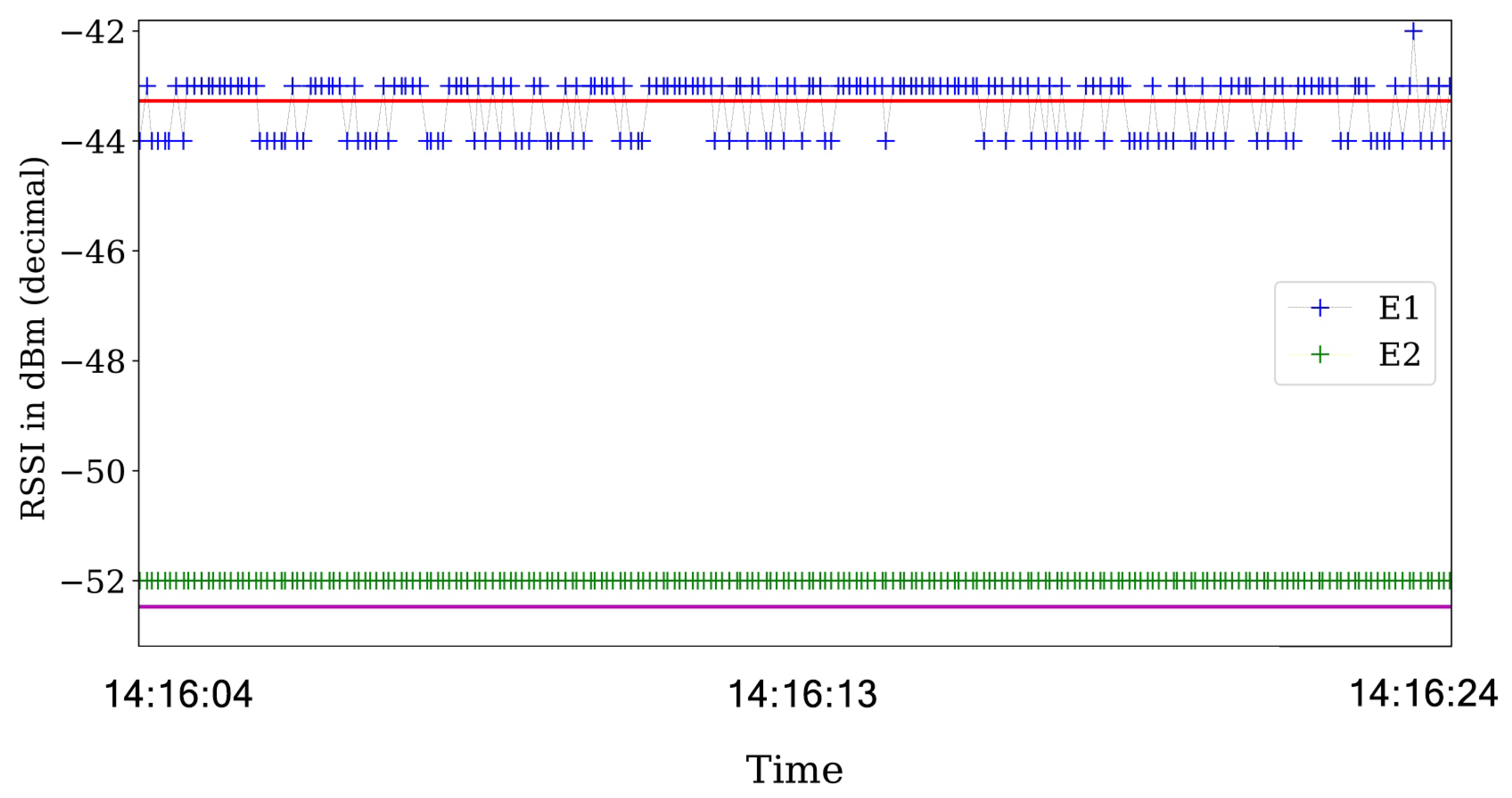
The RSS and Transmission Status data were acquired in the experiments to analyze their variations in both scenarios. These data are plotted using the timestamp of the packets recorded in the x-axis and the RSS value or the status in the y-axis. The sniffer is not considered in the following graphics owing to the difference of the hardware and the process to acquire the power of the received signal.
The first experiments are for the ideal scenario and are performed with the ACKs enable in the communications. For ideal scenarios, the transmission status reported by the ACK is always assessed as a success. Consequently, the RSS values does not present a significant variance as seen in
Figure 10.
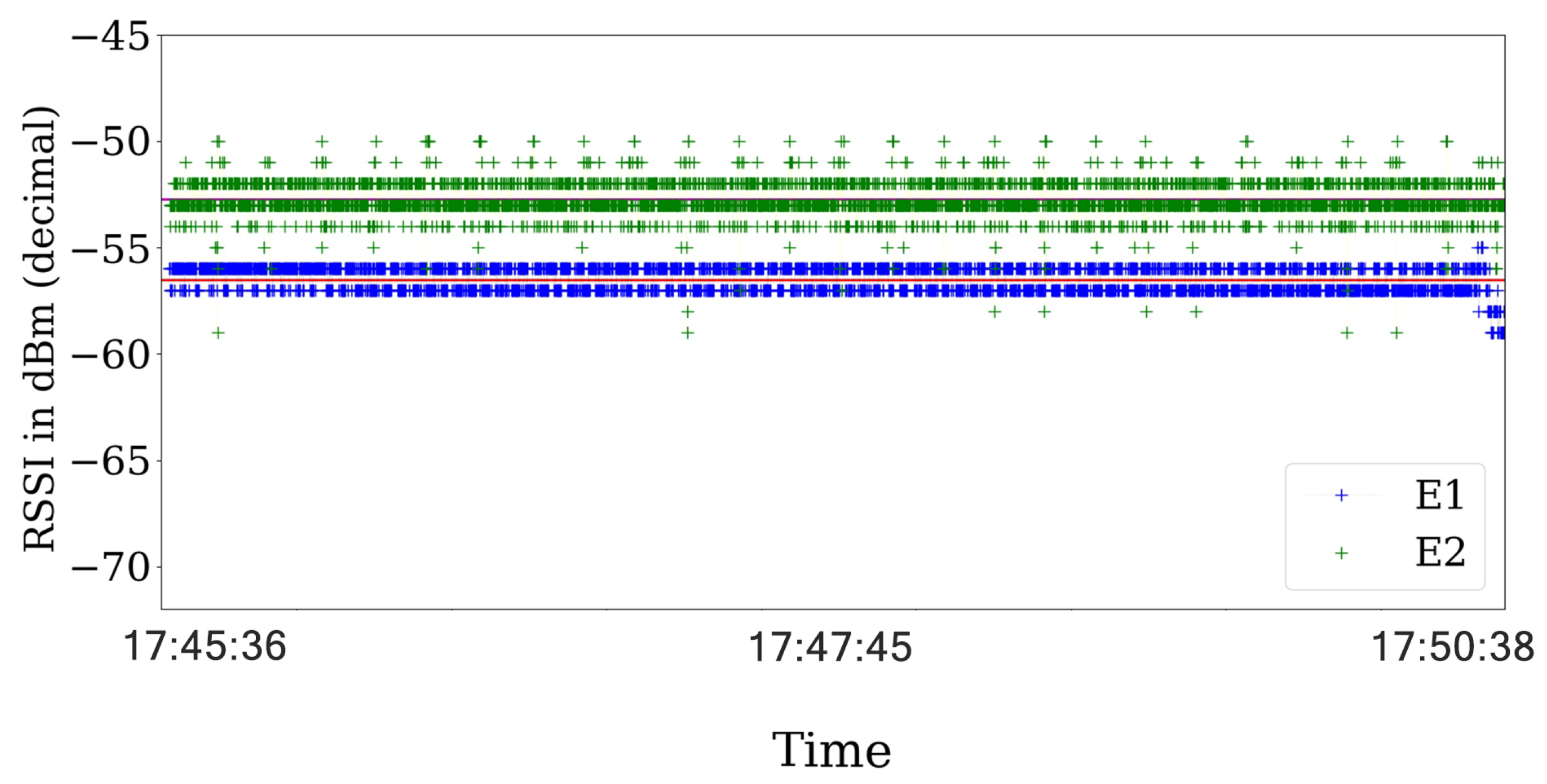
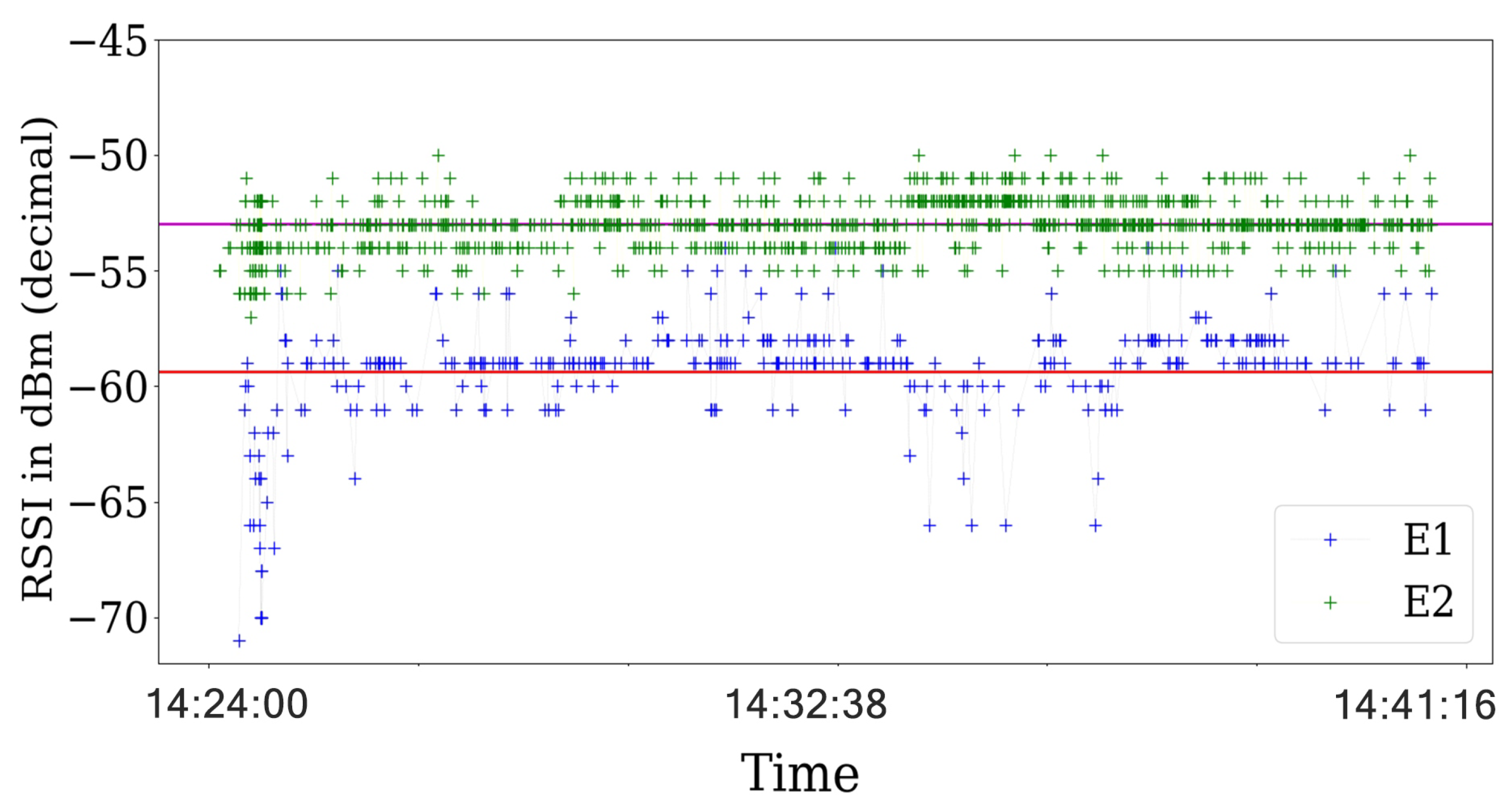
Then, we analyze the RSS values and their respective ACK status information in scenarios with the jamming strategy active. For the reactive jammer, we plot the RSS values in
Figure 11 that show that the RSS values are steady across the experiments.
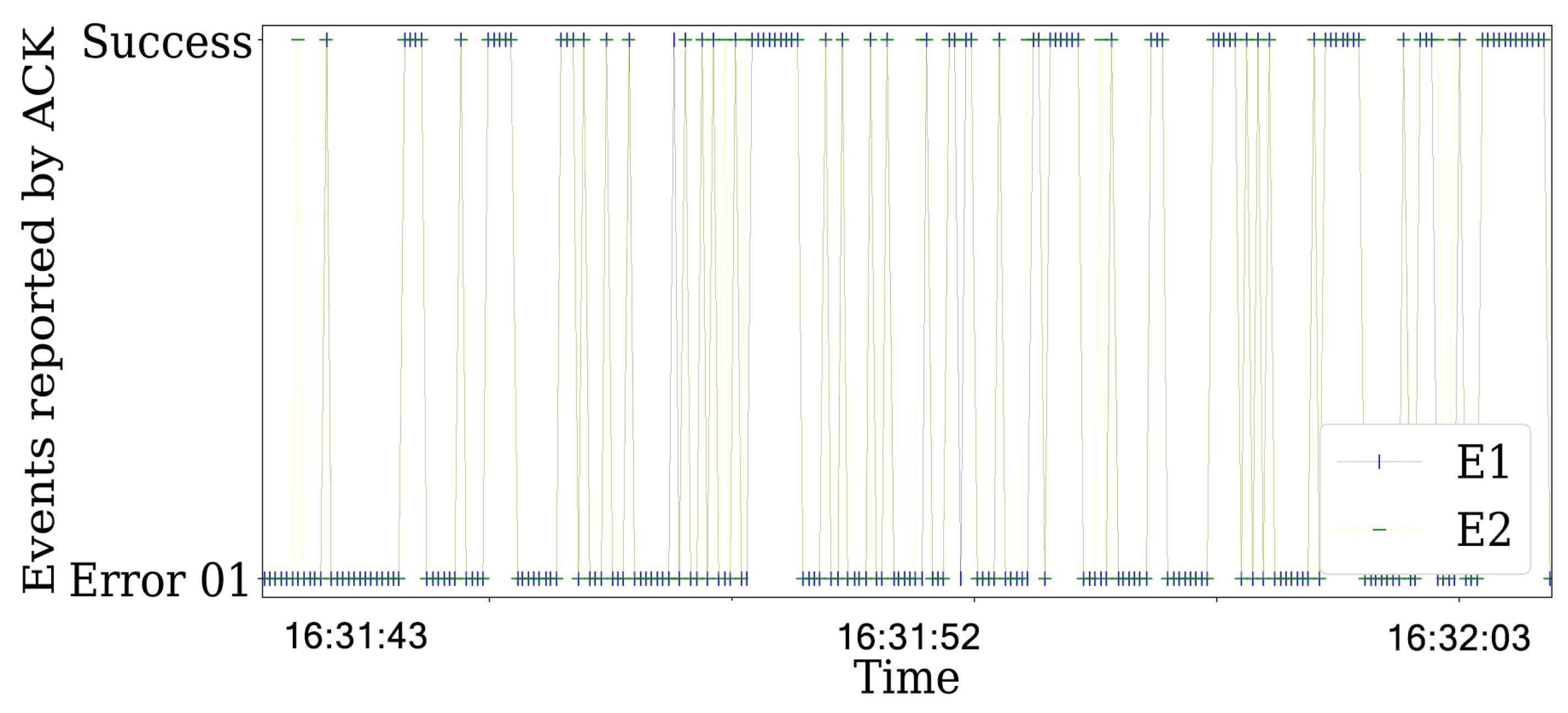
Additionally, we plot the status transmission in
Figure 12. In particular, a lot of errors of the 01 type occurs when the jamming strategy is activated. This means that the packet that was transmitted was reported as a failure transmission due to collisions.
Finally, using the same configuration of the experiments with the reactive jammer, we implement the constant jamming strategy. In the same way as the reactive jammer status report, the constant jammer presents a lot of errors. However, the major difference is in the variance of the RSS values as shown in
Figure 11 for the reactive strategy and in
Figure 13 for the constant strategy.
We also analyze the variance and standard deviation of the RSS values for different values of SINR and jamming strategies. For the reactive strategy, there exists a correlation between the variance and the SINR for the round of experiment realized. When the SINR is lower than 4 dB, the variance present higher values for the range. However, for values of SINR above 7 dB, the variance achieves its lowest value of
as shown in
Table 4.
Nevertheless, the constant jamming behavior is different for all the range of values of SINR analyzed. The variance presents values above of for all of the SINR values obtained in the different experiments. Contrary to the reactive strategy, the constant strategy impacts the RSS values reported by the sensing states. As a consequence, the RSS can be used to improve the detection of attacks in the communication channel, under the assumptions of this work.
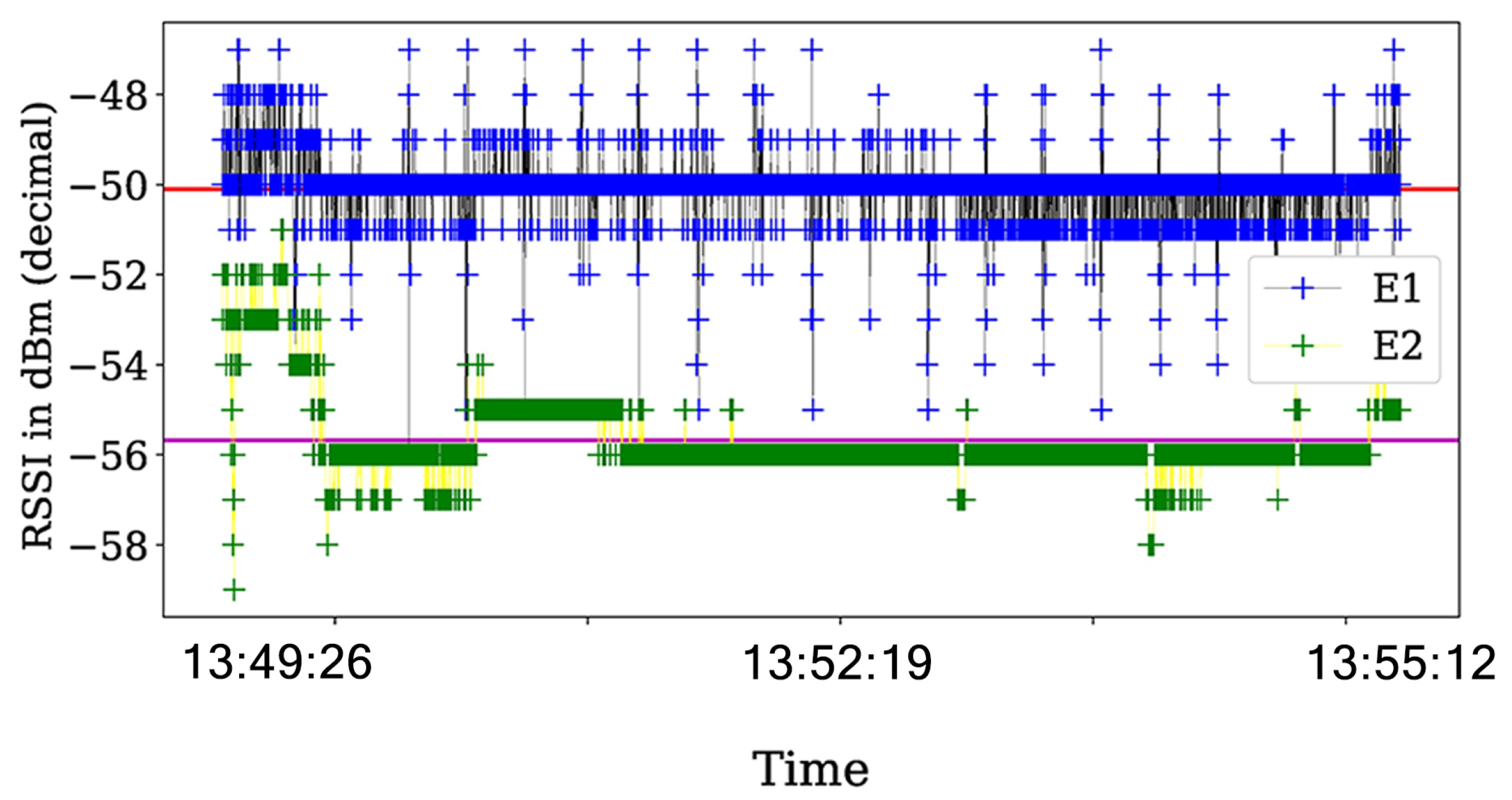
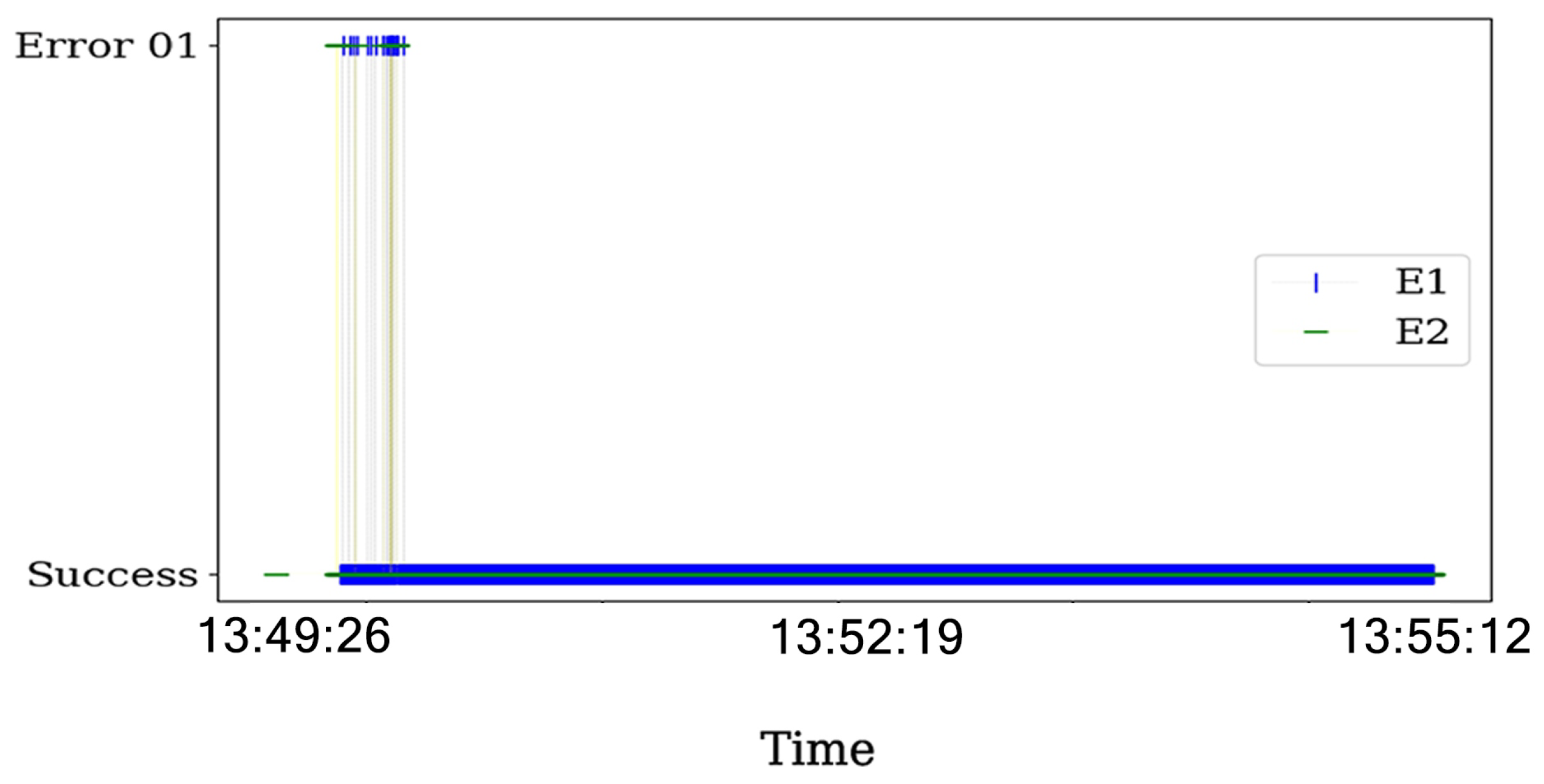
The channel also suffered from other sources of interference as impulsive noises. This phenomenon produces a high variance of RSS values in certain time ranges and triggers an error in the status of the transmission reported by the ACK. In
Figure 14 the impulsive burst noise appears for the timestamp values between 13:48:57 to 13:49:17. This effect generates the highest RSS values of the experiment from the average values acquired in the experiment.
As a consequence, the RSS has the highest values across the experiment for this timestamp range for both transmitters. Summarizing, this behavior shows that the CE can cope with the presence of impulsive noise (or interference) for some packets. For the packets that are not captured, the ACK mechanism can detect the collision and report the transmission failure as show in
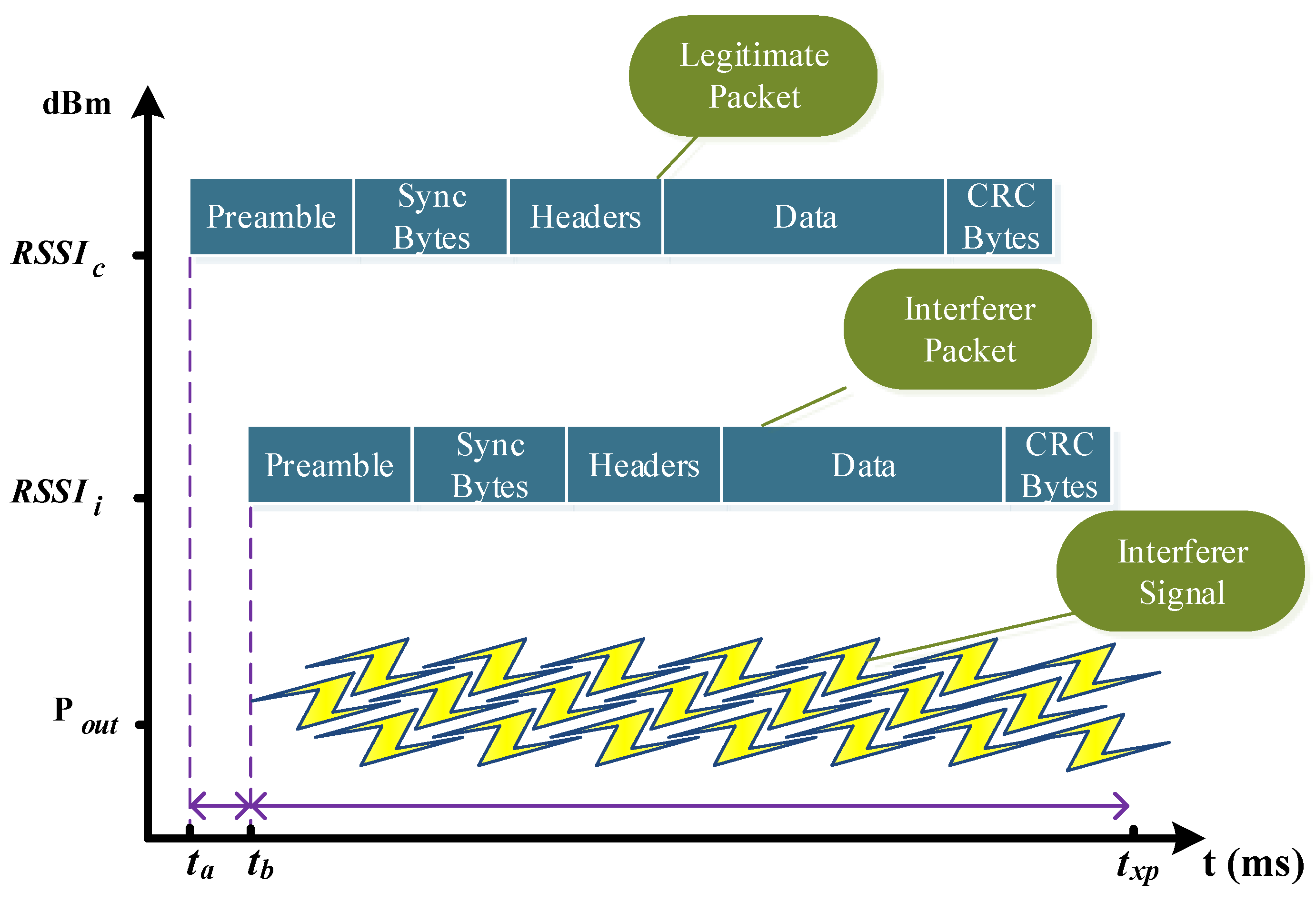
Figure 15. We emphasize that the transmitter E1 is affected by interference during the entire experiments, but does not lead to errors in the transmission. According to the study of the interferences done in
Section 2, the collision occurred outside of the preamble or header bytes of the packet.
The variance that the noise of the burst type and the constant strategy provokes in the RSS values are critical for localization applications [
39]. To correctly distinguish the presence of attackers, the analysis of various performance metrics as RSS, PDR, and goodput is mandatory. Therefore, it is important to use countermeasures that combine use various performance metrics with the RSS values to analyze the presence of attackers.
4.4. Energy Consumption
The energy consumption is calculated using the assumption and associations described in
Section 3.1 for the single packet transmission. Consequently, we need to calculate the energy consumption for the total packets that are transmitted in the time of the experiment
in each scenario. Finally, we correlate the ideal and worst-case scenario with the XBee processes to obtain the time in each scenario for the ATMega2560. Using the time of the experiment and the total transmissions generated by the master clock, we know that a 9000 process of transmission will be generated. Hence, in
Table 5, we present the different timing and energy consumption for the transmitter in each scenario.
In the case of the energy consumption for the jammer devices, we have to calculate separately. For the reactive strategy, the jammer device corresponds to the XBee device used for the legitimate transmitter. Therefore, the electrical characteristics are the same for the calculations. However, the transmission and reception process differs dramatically. As explained earlier, we assume that the reactive jammer has complete knowledge as discussed in [
28]. Therefore, we emulate the reactive strategy transmitting at the same time instant of the legitimate transmitters with a constant scanning of activity in the communication channel. Consequently, the device only presents
time that corresponds to the transmission process of packets and is equal to
. The same assumption is for the constant jammer with their respective electrical characteristics.
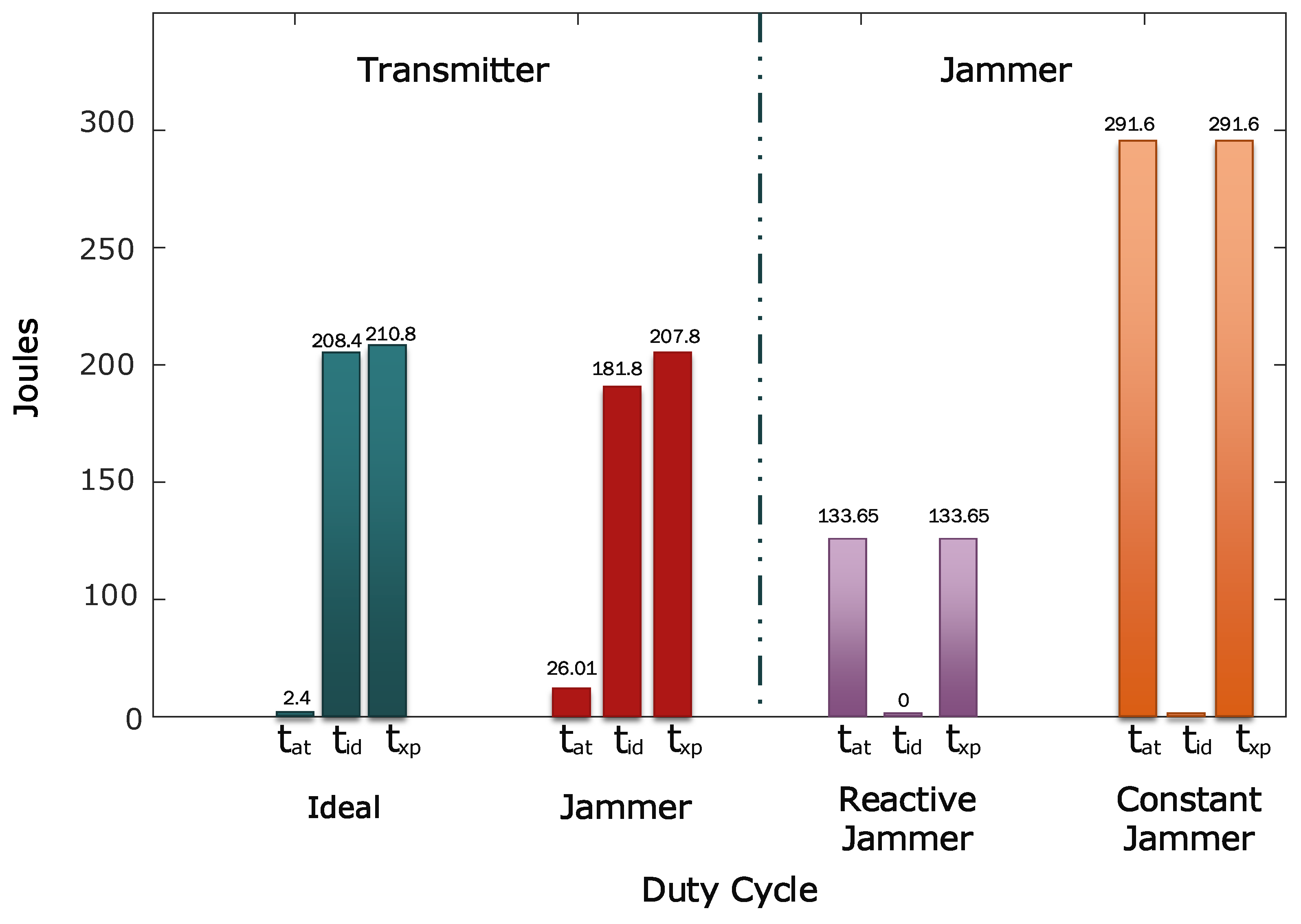
Having stated how to calculate the energy consumption for each device, we contrast the results. For the transmitter, we sum the energy consumption of XBee and ATMega2560 devices in the jammer scenario. Then, we calculate the energy consumption of each jammer device with the previously stated times and with the electrical characteristics presented in
Table 1. The results of total energy consumption for the different devices are presented in
Table 6.
The results are consistent with the methodology and the works that analyze these types of strategies. The constant jammer has higher energy consumption than the other devices and the reactive strategy. In particular, the energy consumption of constant strategy is higher than the transmitter and from the reactive jammer.
However, is interesting to remark that the energy consumption of the transceiver does not present great variations. Moreover, in the worst-case scenario, the XBee has a lower energy consumption than the ideal scenario with
J from
J. This behavior is because the current consumption in the transmitting mode is lower than the idle mode. As a consequence, when a lot of retransmission occurs, the transmitting mode generates more active time, and this compensates for the energy consumption of the ideal scenario as shown in
Figure 16. A similar behavior accounts for the reactive jamming implemented in the XBee devices.
Additionally, the energy consumption of the transmitters in the worst scenario from the reactive strategy is lower with a incidence rate of that corresponds to the ratio between the used time to generate the interference 173 s from the total time of the experiment . As a consequence, the attacker could severely impact the lifetime of the networks using transceivers with similar characteristics. We recommend the use of devices with higher energy efficiency between the transmitting and idle state to improve the lifetime of the network and the implementation of sleep times is mandatory to extend the lifetime. Additionally, the detection of the attacker is mandatory to preserve the integrity of the users in smart environments.
For applications with strict QoS requirements, reactive jammers can expose users to several risks owing to that the jammer has a better energy efficiency than the nodes, which severely compromises the lifetime of the devices. For a lower energy consumption, a reactive strategy can fully discharge the battery of smart devices. Therefore, we recommend that detection algorithms should use RSS values, PDR metric, and the ACK frames status report to improve the integrity of the devices and the network. A reasonable approach to tackle this issue could be to use AI or machine learning techniques to improve the detection of these types of attacks.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}