
Piezo-Resistive Properties of Bio-Based Sensor Yarn Made with Sisal Fibre

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Material Selection
2.2. Preparation of PVA Solution
2.3. Fabrication of Sensor Yarns
2.4. Characterization of the Strain-Sensor Yarns
3. Results and Discussions
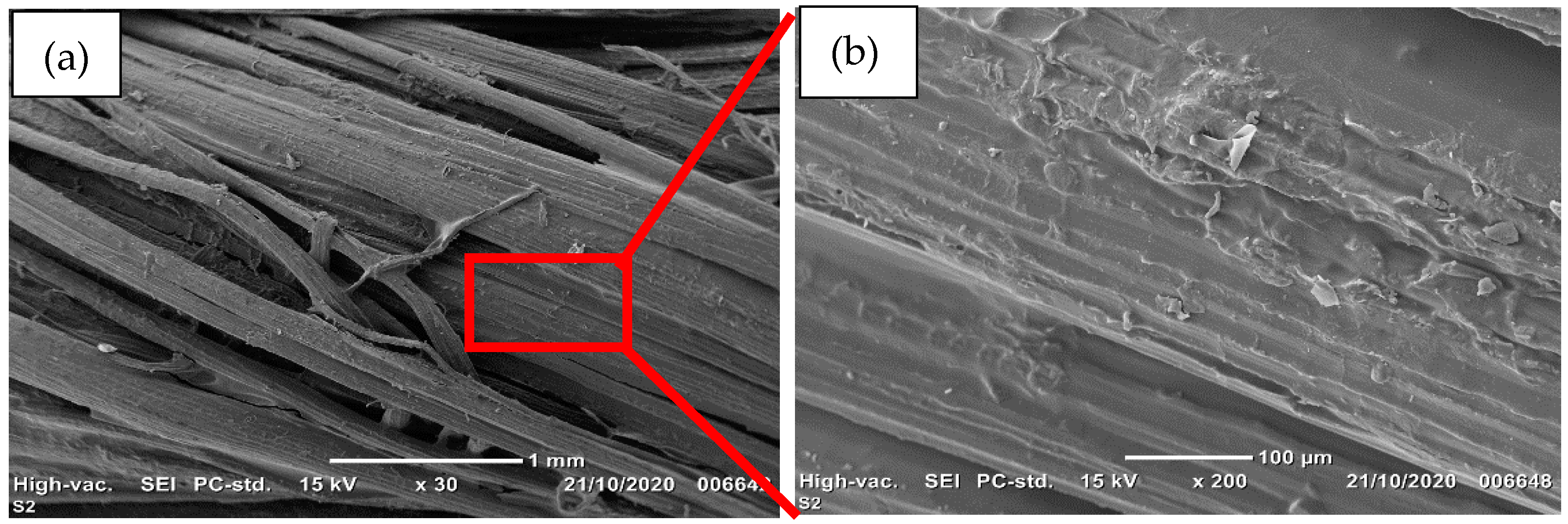
3.1. Morphological Properties of Sensor Yarn
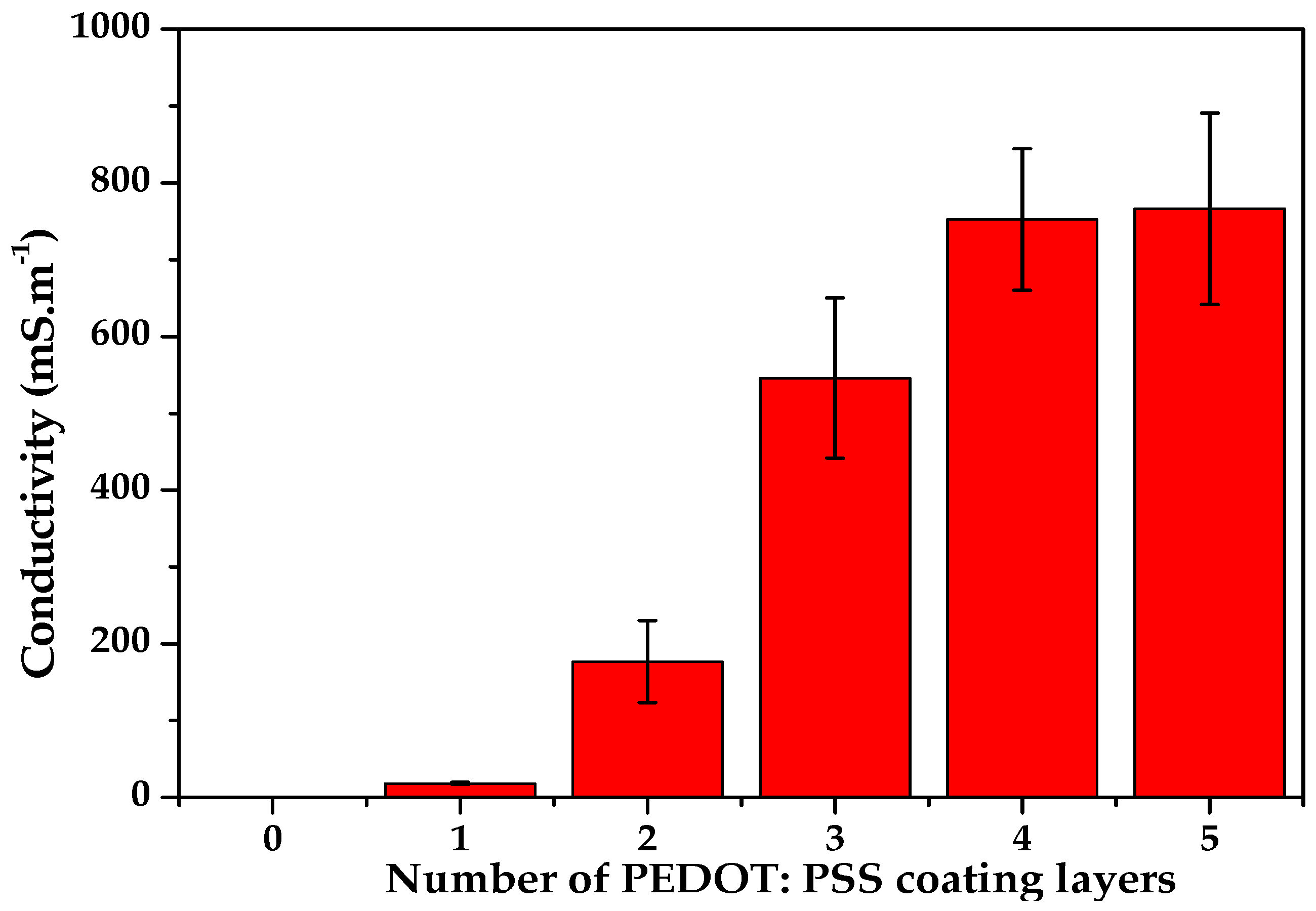
3.2. Electrical Characterization
3.3. Mechanical Characterization
3.3.1. Mechanical Properties of Sensor Yarns
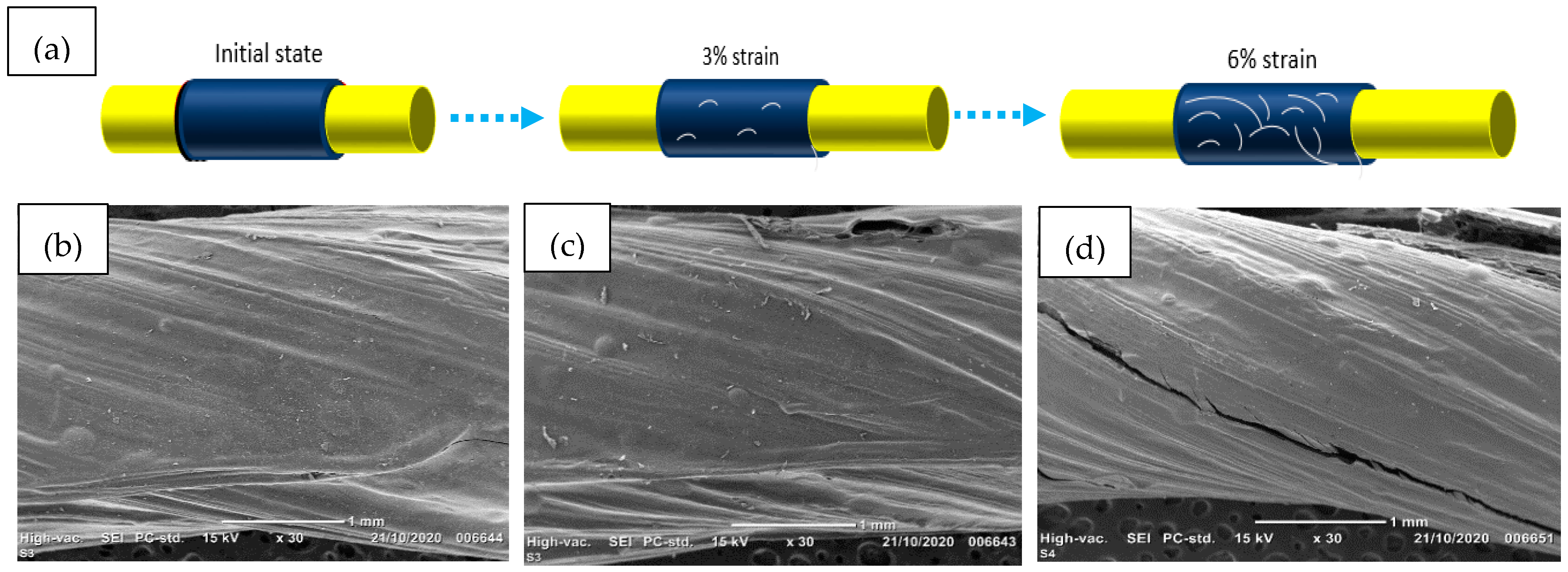
3.3.2. Impact of the Applied Strain on Sensor Yarns
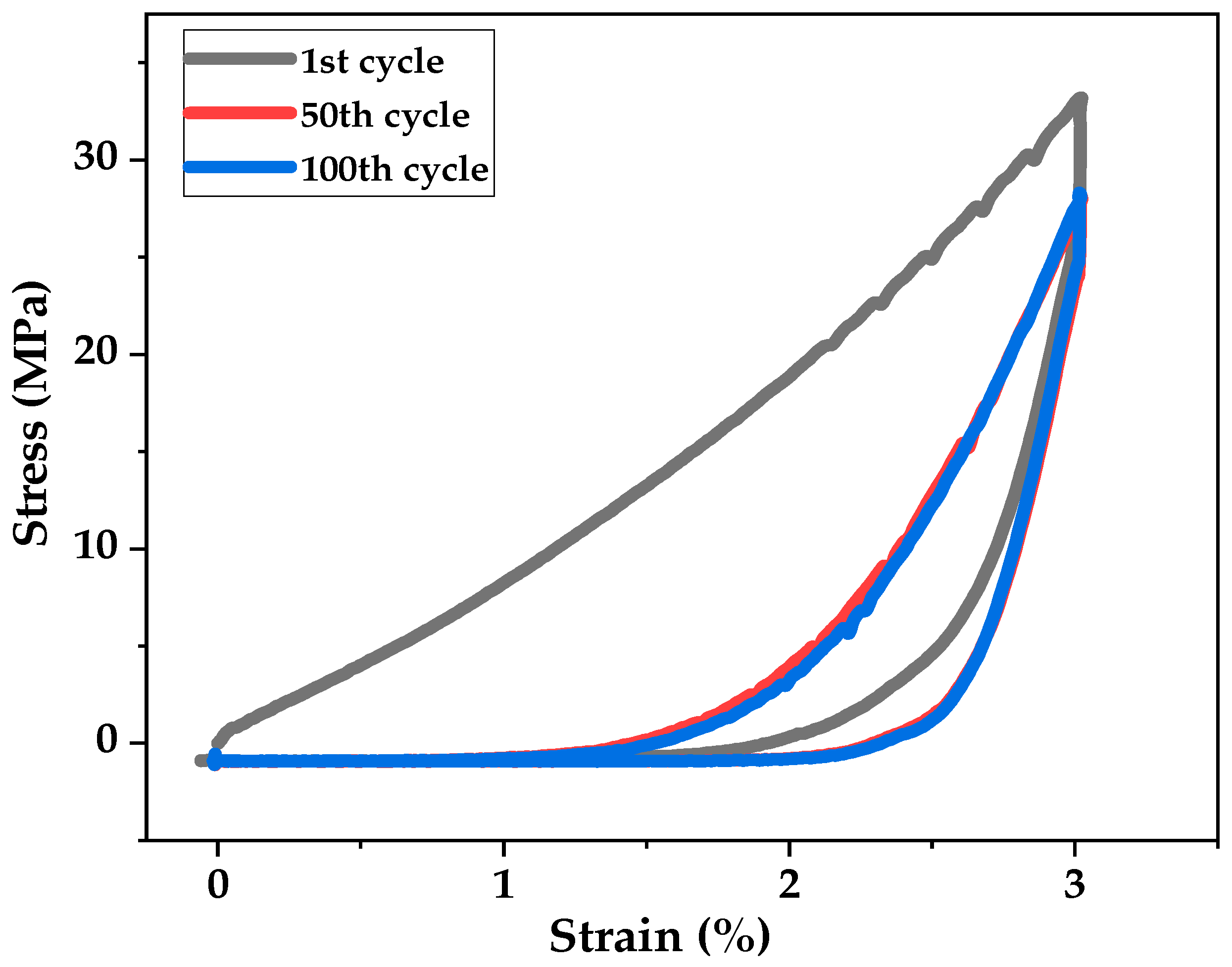
3.3.3. Mechanical Hysteresis
3.4. Electromechanical Properties of Sensor Yarn
3.4.1. Uni-Axial Sensing Behaviour
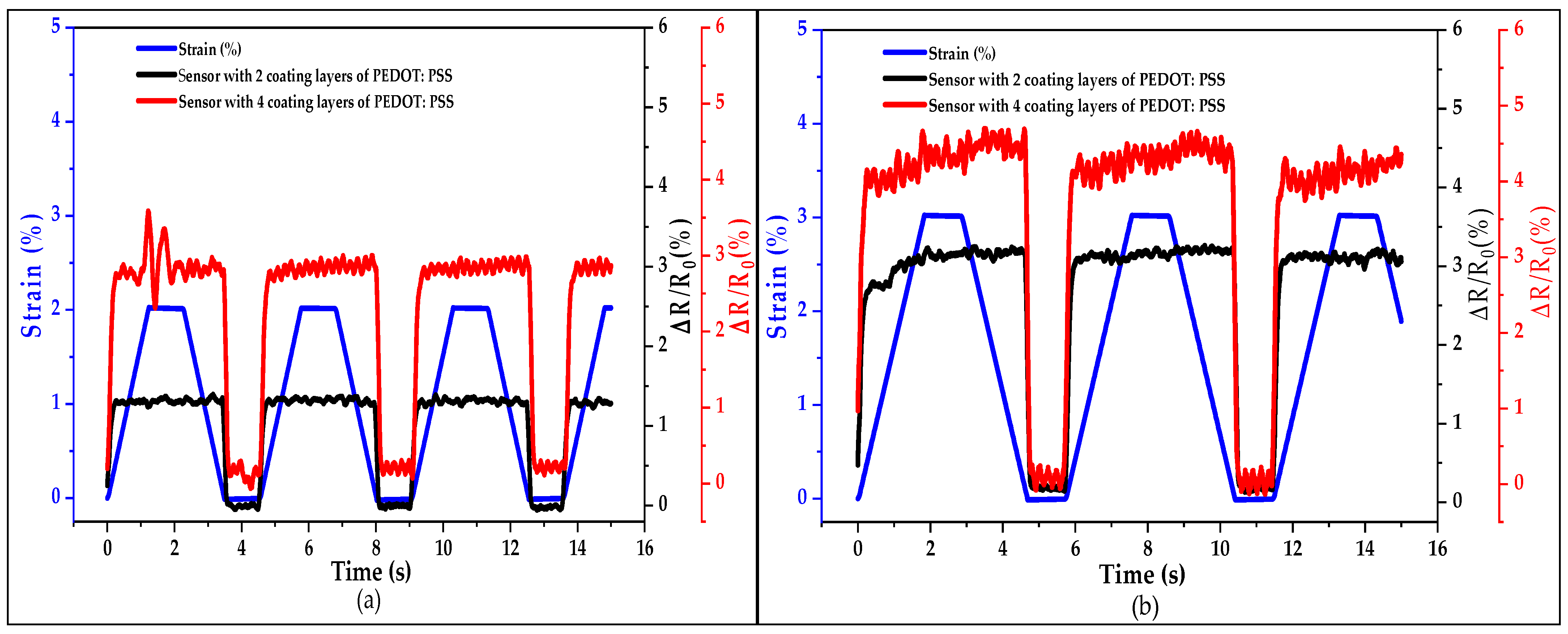
3.4.2. Cyclic Strain YARN Sensing Properties
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Park, G.; Park, H. Structural Design and Test of Automobile Bonnet with Natural Flax Composite through Impact Damage Analysis. Compos. Struct. 2018, 184, 800–806. [Google Scholar] [CrossRef]
- Kuo, W.-S.; Fang, J.; Lin, H.-W. Failure Behavior of 3D Woven Composites under Transverse Shear. Compos. Part A Appl. Sci. Manuf. 2003, 34, 561–575. [Google Scholar] [CrossRef]
- Bourmaud, A.; Beaugrand, J.; Shah, D.U.; Placet, V.; Baley, C. Towards the Design of High-Performance Plant Fibre Composites. Prog. Mater. Sci. 2018, 97, 347–408. [Google Scholar] [CrossRef]
- Getu, D.; Nallamothu, R.B.; Masresha, M.; Nallamothu, S.K.; Nallamothu, A.K. Production and Characterization of Bamboo and Sisal Fiber Reinforced Hybrid Composite for Interior Automotive Body Application. Mater. Today Proc. 2021, 38, 2853–2860. [Google Scholar] [CrossRef]
- Lansiaux, H.; Soulat, D.; Boussu, F.; Labanieh, A.R. Development and Multiscale Characterization of 3D Warp Interlock Flax Fabrics with Different Woven Architectures for Composite Applications. Fibers 2020, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Corbin, A.-C.; Sala, B.; Soulat, D.; Ferreira, M.; Labanieh, A.-R.; Placet, V. Development of Quasi-Unidirectional Fabrics with Hemp Fiber: A Competitive Reinforcement for Composite Materials. J. Compos. Mater. 2021, 55, 551–564. [Google Scholar] [CrossRef]
- Omrani, F.; Wang, P.; Soulat, D.; Ferreira, M. Mechanical Properties of Flax-Fibre-Reinforced Preforms and Composites: Influence of the Type of Yarns on Multi-Scale Characterisations. Compos. Part A Appl. Sci. Manuf. 2017, 93, 72–81. [Google Scholar] [CrossRef]
- Corbin, A.-C.; Soulat, D.; Ferreira, M.; Labanieh, A.-R.; Gabrion, X.; Malécot, P.; Placet, V. Towards Hemp Fabrics for High-Performance Composites: Influence of Weave Pattern and Features. Compos. Part B Eng. 2020, 181, 107582. [Google Scholar] [CrossRef]
- Baley, C.; Gomina, M.; Breard, J.; Bourmaud, A.; Davies, P. Variability of Mechanical Properties of Flax Fibres for Composite Reinforcement. A Review. Ind. Crop. Prod. 2020, 145, 111984. [Google Scholar] [CrossRef]
- Mittal, V.; Saini, R.; Sinha, S. Natural Fiber-Mediated Epoxy Composites–A Review. Compos. Part B Eng. 2016, 99, 425–435. [Google Scholar] [CrossRef]
- Zeng, W.; Shu, L.; Li, Q.; Chen, S.; Wang, F.; Tao, X.-M. Fiber-Based Wearable Electronics: A Review of Materials, Fabrication, Devices, and Applications. Adv. Mater. 2014, 26, 5310–5336. [Google Scholar] [CrossRef]
- Pang, C.; Lee, G.-Y.; Kim, T.; Kim, S.M.; Kim, H.N.; Ahn, S.-H.; Suh, K.-Y. A Flexible and Highly Sensitive Strain-Gauge Sensor Using Reversible Interlocking of Nanofibres. Nat. Mater. 2012, 11, 795–801. [Google Scholar] [CrossRef] [PubMed]
- Zeng, Z.; Chen, M.; Jin, H.; Li, W.; Xue, X.; Zhou, L.; Pei, Y.; Zhang, H.; Zhang, Z. Thin and Flexible Multi-Walled Carbon Nanotube/Waterborne Polyurethane Composites with High-Performance Electromagnetic Interference Shielding. Carbon 2016, 96, 768–777. [Google Scholar] [CrossRef]
- Tang, X.-Z.; Mu, C.; Zhu, W.; Yan, X.; Hu, X.; Yang, J. Flexible Polyurethane Composites Prepared by Incorporation of Polyethylenimine-Modified Slightly Reduced Graphene Oxide. Carbon 2016, 98, 432–440. [Google Scholar] [CrossRef]
- Tian, M.; Hu, X.; Qu, L.; Zhu, S.; Sun, Y.; Han, G. Versatile and Ductile Cotton Fabric Achieved via Layer-by-Layer Self-Assembly by Consecutive Adsorption of Graphene Doped PEDOT: PSS and Chitosan. Carbon 2016, 96, 1166–1174. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, R.; Sun, J.; Gao, L. A Stretchable and Highly Sensitive Graphene-Based Fiber for Sensing Tensile Strain, Bending, and Torsion. Adv. Mater. 2015, 27, 7365–7371. [Google Scholar] [CrossRef]
- Bilotti, E.; Zhang, R.; Deng, H.; Baxendale, M.; Peijs, T. Fabrication and Property Prediction of Conductive and Strain Sensing TPU/CNT Nanocomposite Fibres. J. Mater. Chem. 2010, 20, 9449. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Z.; Ding, J.; Lepró, X.; Fang, S.; Jiang, N.; Yuan, N.; Wang, R.; Yin, Q.; Lv, W.; et al. Downsized Sheath-Core Conducting Fibers for Weavable Superelastic Wires, Biosensors, Supercapacitors, and Strain Sensors. Adv. Mater. 2016, 28, 4998–5007. [Google Scholar] [CrossRef]
- Trifigny, N.; Kelly, F.; Cochrane, C.; Boussu, F.; Koncar, V.; Soulat, D. PEDOT:PSS-Based Piezo-Resistive Sensors Applied to Reinforcement Glass Fibres for in Situ Measurement during the Composite Material Weaving Process. Sensors 2013, 13, 10749–10764. [Google Scholar] [CrossRef]
- Khadir, A.; Negarestani, M.; Ghiasinejad, H. Low-Cost Sisal Fibers/Polypyrrole/Polyaniline Biosorbent for Sequestration of Reactive Orange 5 from Aqueous Solutions. J. Environ. Chem. Eng. 2020, 8, 103956. [Google Scholar] [CrossRef]
- Joseph, P.V.; Joseph, K.; Thomas, S. Effect of Processing Variables on the Mechanical Properties of Sisal-fiber-Reinforced Polypropylene Composites. Compos. Sci. Technol. 1999, 59, 1625–1640. [Google Scholar] [CrossRef]
- Venkateshwaran, N.; ElayaPerumal, A.; Alavudeen, A.; Thiruchitrambalam, M. Mechanical and Water Absorption Behaviour of Banana/Sisal Reinforced Hybrid Composites. Mater. Des. 2011, 32, 4017–4021. [Google Scholar] [CrossRef]
- Senthilkumar, K.; Saba, N.; Rajini, N.; Chandrasekar, M.; Jawaid, M.; Siengchin, S.; Alotman, O.Y. Mechanical Properties Evaluation of Sisal Fibre Reinforced Polymer Composites: A Review. Constr. Build. Mater. 2018, 174, 713–729. [Google Scholar] [CrossRef]
- Reddy, G.V.; Naidu, S.V.; Rani, T.S. A Study on Hardness and Flexural Properties of Kapok/Sisal Composites. J. Reinf. Plast. Compos. 2009, 28, 2035–2044. [Google Scholar] [CrossRef]
- Sanjay, M.R.; Madhu, P.; Jawaid, M.; Senthamaraikannan, P.; Senthil, S.; Pradeep, S. Characterization and Properties of Natural Fiber Polymer Composites: A Comprehensive Review. J. Clean. Prod. 2018, 172, 566–581. [Google Scholar] [CrossRef]
- Samouh, Z.; Molnar, K.; Boussu, F.; Cherkaoui, O.; El Moznine, R. Mechanical and Thermal Characterization of Sisal Fiber Reinforced Polylactic Acid Composites. Polym. Adv. Technol. 2019, 30, 529–537. [Google Scholar] [CrossRef] [Green Version]
- Hashmi, S.A.R.; Naik, A.; Chand, N.; Sharma, J.; Sharma, P. Development of Environment Friendly Hybrid Layered Sisal–Glass–Epoxy Composites. Compos. Interfaces 2011, 18, 671–683. [Google Scholar] [CrossRef]
- Costa, P.; Silva, J.; Sencadas, V.; Simoes, R.; Viana, J.C.; Lanceros-Méndez, S. Mechanical, Electrical and Electro-Mechanical Properties of Thermoplastic Elastomer Styrene–Butadiene–Styrene/Multiwall Carbon Nanotubes Composites. J. Mater. Sci. 2013, 48, 1172–1179. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.-F.; Guo, M.-M.; Zhang, Y.; Tang, C.Y.; Jiang, C.; Dong, Y.; Law, W.-C.; Du, F.-P. Flexible, Stretchable and Conductive PVA/PEDOT:PSS Composite Hydrogels Prepared by SIPN Strategy. Polym. Test. 2020, 81, 106213. [Google Scholar] [CrossRef]
- Zhao, J.; Dai, K.; Liu, C.; Zheng, G.; Wang, B.; Liu, C.; Chen, J.; Shen, C. A Comparison between Strain Sensing Behaviors of Carbon Black/Polypropylene and Carbon Nanotubes/Polypropylene Electrically Conductive Composites. Compos. Part A Appl. Sci. Manuf. 2013, 48, 129–136. [Google Scholar] [CrossRef]
- Sadasivuni, K.K.; Ponnamma, D.; Thomas, S.; Grohens, Y. Evolution from Graphite to Graphene Elastomer Composites. Prog. Polym. Sci. 2014, 39, 749–780. [Google Scholar] [CrossRef]
- Balima, F.; Le Floch, S.; Adessi, C.; Cerqueira, T.F.T.; Blanchard, N.; Arenal, R.; Brûlet, A.; Marques, M.A.L.; Botti, S.; San-Miguel, A. Radial Collapse of Carbon Nanotubes for Conductivity Optimized Polymer Composites. Carbon 2016, 106, 64–73. [Google Scholar] [CrossRef] [Green Version]
- Jeong, Y.R.; Park, H.; Jin, S.W.; Hong, S.Y.; Lee, S.-S.; Ha, J.S. Highly Stretchable and Sensitive Strain Sensors Using Fragmentized Graphene Foam. Adv. Funct. Mater. 2015, 25, 4228–4236. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Y.; Dai, K.; Liu, M.; Zhou, K.; Zheng, G.; Liu, C.; Shen, C. Conductive Thermoplastic Polyurethane Composites with Tunable Piezoresistivity by Modulating the Filler Dimensionality for Flexible Strain Sensors. Compos. Part A Appl. Sci. Manuf. 2017, 101, 41–49. [Google Scholar] [CrossRef]
- Nakamura, A.; Hamanishi, T.; Kawakami, S.; Takeda, M. A Piezo-Resistive Graphene Strain Sensor with a Hollow Cylindrical Geometry. Mater. Sci. Eng. B 2017, 219, 20–27. [Google Scholar] [CrossRef]
- Duan, L.; Fu, S.; Deng, H.; Zhang, Q.; Wang, K.; Chen, F.; Fu, Q. The Resistivity–Strain Behavior of Conductive Polymer Composites: Stability and Sensitivity. J. Mater. Chem. A 2014, 2, 17085–17098. [Google Scholar] [CrossRef]
- Deng, H.; Ji, M.; Yan, D.; Fu, S.; Duan, L.; Zhang, M.; Fu, Q. Towards Tunable Resistivity–Strain Behavior through Construction of Oriented and Selectively Distributed Conductive Networks in Conductive Polymer Composites. J. Mater. Chem. A 2014, 2, 10048–10058. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PEDOT:PSS Coating Properties | ||
|---|---|---|
| Number of Coating Layers | Mass (mg) | Thickness (µm) |
| 1 | 18.7 ± 0.9 | 47.0 ± 1.6 |
| 2 | 22.5 ± 1.3 | 67.0 ± 2.3 |
| 3 | 26.5 ± 3.4 | 81.0 ± 3.0 |
| 4 | 29.7 ± 4.1 | 90.0 ± 3.3 |
| Samples: Sensor Yarn | Strain Range: 0–2.5% | Strain Range: 2.5–4.5% | Strain Range: 4.5–7% |
|---|---|---|---|
| GF | GF | GF | |
| Two coating layers of PEDOT:PSS | 0.21 ± 0.01 (R2 = 0.791) | 1.20 ± 0.01 (R2 = 0.982) | 2.68 ± 0.01 (R2 = 0.985) |
| Four coating layers of PEDOT:PSS | 0.42 ± 0.02 (R2 = 0.804) | 2.04 ± 0.01 (R2 = 0.997) | 3.98 ± 0.01 (R2 = 0.999) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abed, A.; Samouh, Z.; Cochrane, C.; Boussu, F.; Cherkaoui, O.; El Moznine, R.; Vieillard, J. Piezo-Resistive Properties of Bio-Based Sensor Yarn Made with Sisal Fibre. Sensors 2021, 21, 4083. https://doi.org/10.3390/s21124083
Abed A, Samouh Z, Cochrane C, Boussu F, Cherkaoui O, El Moznine R, Vieillard J. Piezo-Resistive Properties of Bio-Based Sensor Yarn Made with Sisal Fibre. Sensors. 2021; 21(12):4083. https://doi.org/10.3390/s21124083
Chicago/Turabian StyleAbed, Ahmed, Zineb Samouh, Cédric Cochrane, Francois Boussu, Omar Cherkaoui, Reddad El Moznine, and Julien Vieillard. 2021. "Piezo-Resistive Properties of Bio-Based Sensor Yarn Made with Sisal Fibre" Sensors 21, no. 12: 4083. https://doi.org/10.3390/s21124083
APA StyleAbed, A., Samouh, Z., Cochrane, C., Boussu, F., Cherkaoui, O., El Moznine, R., & Vieillard, J. (2021). Piezo-Resistive Properties of Bio-Based Sensor Yarn Made with Sisal Fibre. Sensors, 21(12), 4083. https://doi.org/10.3390/s21124083